中藥材移栽機關鍵部件設計研究
2021-12-31 02:26:28劉曉秋
農(nóng)產(chǎn)品加工 2021年21期
關鍵詞:設計
劉曉秋
(山西省農(nóng)業(yè)機械發(fā)展中心,山西太原 030002)
隨著中藥材、蔬菜等作物種植面積的日益擴大,對移栽機的需求量也日益增加。目前,國內(nèi)移栽方式主要是依靠人工和半自動移栽機進行作業(yè),但隨著農(nóng)業(yè)從業(yè)人員逐步減少,同時育苗移栽技術也逐漸成熟,對提高移栽效率、降低勞動強度有了新的要求。相對于國外,我國的移栽技術起步較晚,全自動插秧機由于其結(jié)構復雜、造價過高,致使大部分自動移栽機技術不是很成熟,而現(xiàn)階段使用和研制的多為半自動移栽機。因此,結(jié)合當前移栽機的結(jié)構特點,重點對移栽機的移栽機構進行了升級改進設計。
1 移栽系統(tǒng)的總體設計
該設計采用SolidWorks建模,如圖1所示為單套機構。一臺2行自走式半自動移栽機需配套2套移栽機構,移栽機構通過螺栓固定在自走式半自動移栽機的2個獨立單體上,動力由半自動移栽機通過鏈輪傳動提供,總動力大于8馬力[1]。該機構單套外形尺寸為1 200 mm×380 mm×750 mm,安裝方便,結(jié)構簡單,移栽機構的旋轉(zhuǎn)架旋轉(zhuǎn)1周,苗夾進行兩次取苗、喂苗,苗杯轉(zhuǎn)過3個,苗盤經(jīng)過槽輪機構驅(qū)動輸送兩格。3個苗夾安裝在一根旋轉(zhuǎn)軸上,共兩組旋轉(zhuǎn)反復作業(yè),一次作業(yè)取苗3株后通過護苗桶,將秧苗放入苗杯。
單套移載機構三維模型見圖1。
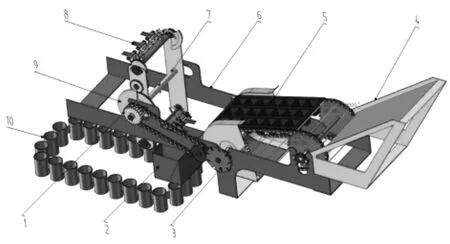
圖1 單套移載機構三維模型
2 關鍵部件設計
2.1 旋轉(zhuǎn)架工作原理
旋轉(zhuǎn)架圍繞一級旋轉(zhuǎn)軸(5號)旋轉(zhuǎn),導向盤和6號不完全齒輪與機架固定,3號齒輪與9號齒輪同軸,3號齒輪置于旋轉(zhuǎn)架內(nèi)側(cè),9號齒輪置于旋轉(zhuǎn)架外側(cè),與6號不完全齒輪嚙合。二級旋轉(zhuǎn)軸上裝配苗夾和10號齒輪,10號齒輪置于旋轉(zhuǎn)架內(nèi)側(cè),與3號齒輪嚙合。
旋轉(zhuǎn)架傳動三維模型見圖2。
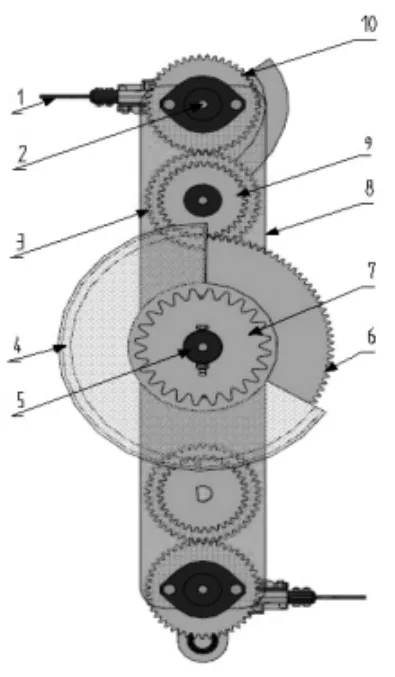
圖2 旋轉(zhuǎn)架傳動三維模型
當動力傳輸給7號鏈輪,機架圍繞一級旋轉(zhuǎn)軸開始順勢正旋轉(zhuǎn),因?qū)虮P和不完全齒輪固定在機架上,9號齒輪與6號齒輪進入嚙合狀態(tài),其在圍繞一級旋轉(zhuǎn)軸旋轉(zhuǎn)的同時,開始順時針自轉(zhuǎn),3號齒輪進行同步自轉(zhuǎn)。3號齒輪與10號齒輪一直處于嚙合狀態(tài),10號齒輪在跟隨機架旋轉(zhuǎn)的同時,開始進行逆時針旋轉(zhuǎn)。
2.2 傳動設計
齒輪傳動設計見圖3。
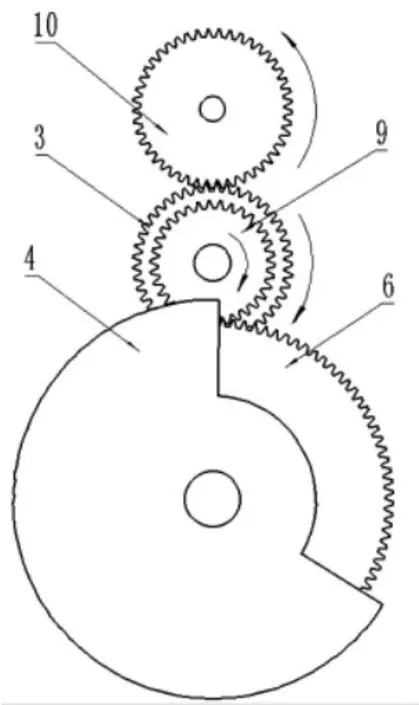
圖3 齒輪傳動設計
由圖3可知,三組齒輪圓心在同一中心線上,共4個齒輪兩兩嚙合。其中,10號齒輪與3號齒輪中心距90 mm;9號齒輪與6號不完全齒輪的中心距135 mm。根據(jù)公式:
式中:a——中心距;
Z1,Z2——齒輪齒數(shù);
M——為模數(shù)(3,10兩齒輪相等);10號齒輪和3號齒輪設定齒輪系數(shù):M1=Z2=2;得3號和10號齒輪為45,分度圓直徑為90 mm;6號齒輪為不完全齒輪,切除2/3的齒數(shù),在9,6號齒輪嚙合時:
Z1=1/3 Z2;
設定齒輪系數(shù)為1.5,可得9號齒輪齒數(shù)Z1為45,分度圓直徑67.5 mm;
6號齒輪齒數(shù)Z2為135,分度圓直徑202.5 mm。
3 夾苗裝置的設計
3.1 工作原理
門形夾形狀設計見圖4。
圖4 門形夾形狀設計
夾苗裝置功能是為了成功夾住秧苗以便提起,如圖4所示,門形夾寬為70 mm。在實際應用中,可通過更改門夾寬度來適應不同型號的苗缽[2]。
門形夾由回位彈簧控制處于常閉狀態(tài),當旋轉(zhuǎn)架旋轉(zhuǎn)到合適位置,由位置機構控制轉(zhuǎn)軸旋轉(zhuǎn),帶動撥片推開銷子,門形夾向上打開,在夾苗的同時進行拔苗,隨后轉(zhuǎn)軸脫離位置機構[3];當旋轉(zhuǎn)架帶動門形夾轉(zhuǎn)到護苗桶上方時,位置機構控制轉(zhuǎn)軸旋轉(zhuǎn),苗夾打開,隨后脫離控制機構,苗夾自動閉合[4-5]。
3.2 苗夾運動仿真
設旋轉(zhuǎn)架軌跡為A圓(不動圓),半徑為R;
苗夾旋轉(zhuǎn)軌跡為B圓(旋轉(zhuǎn)圓),半徑為r;
同一狀態(tài)下點P與B圓繞各自圓心轉(zhuǎn)過的角度之比為-k。以點A為坐標原點、水平向右為x軸正向建立平面直角坐標系。
為計算方便,假定初始時刻B圓位于A圓右側(cè),點P(x,y)位于B圓右側(cè),如圖5所示。
苗夾端點軌跡分析見圖5。
計算參數(shù)方程:
當B圓繞A圓圓心轉(zhuǎn)過θ角時,根據(jù)圓的參數(shù)方程可知:
xB=R cosθ;
圖5 苗夾端點軌跡分析
yB=R sinθ.
此時點P繞B圓圓心轉(zhuǎn)過角-kθ,即:
xP=xB+r cos(-kθ);
yP=yB+r sin(-kθ).
旋轉(zhuǎn)架半徑為225 mm;苗夾旋轉(zhuǎn)半徑為130 mm;6號齒輪與9號齒輪的傳動比為1∶3,即k=3,所以苗夾端點P的軌跡參數(shù)方程:
x=R cosθ+r cos(-3θ);
y=R sinθ+r sin(-3θ).
4 結(jié)論
針對半自動移栽機,對移栽機的關鍵部件進行了升級改進。通過對部件的運動仿真,基本滿足該移栽機的改進要求。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04