一種二次雷達身份代碼聚合提取的方法
2022-01-03 16:58:04羊洪國吳曉華
科技與創新 2021年24期
吳 兵,羊洪國,吳曉華
(四川九洲空管科技有限責任公司,四川 綿陽 621000)
隨著世界經濟的蓬勃發展,各地的人口流動和物流運輸越來越頻繁,航空事業也得到了迅猛發展。軍/民航空中交通管制系統對目標身份代碼探測準確率的要求越來越高,其準確度能極大發揮二次雷達的工作效能,為航管指揮和航空戰略決策提供重要依據。
1 二次雷達身份代碼簡介
二次雷達采用一問一答的工作方式,可通過較小的發射功率獲取目標的距離、方位、身份代碼、高度等信息。
常規的二次雷達系統工作模式有M1、M2、M3/A、MC。其中M1、M2為軍用明碼識別模式,M3/A為軍民兩用識別模式,MC為高度詢問。其詢問信號編碼格式如圖1所示,圖中的P1、P3為詢問脈沖,通過天線和波束對空輻射。P2為旁瓣脈沖,通過天線的控制波束對空輻射。

圖1 詢問信號編碼格式
M1、M2、M3/A、MC的應答碼由16個碼位組成,其應答信號格式如圖2所示。每個碼位有兩種狀態,即有脈沖(“1”)和無脈沖(“0”)。F1和F2碼位是框架脈沖,恒為“1”狀態。X碼位為無人機指示碼位,SPI碼位是特殊位置識別碼位,C1、A1、C2、A2、C4、A4、B1、D1、B2、D2、B4、D4共12位是信息碼位,可組成4 096個獨立的應答碼位[1]。

圖2 應答信號編碼格式
當接收機接收到應答信號后,經限幅、濾波、放大處理、下變頻后輸出視頻信號,采樣后的視頻信號發送至譯碼模塊,譯碼模塊對視頻信號進行6 dB檢測、STC檢測、框架解碼、旁瓣抑制、去幻影應答、虛假框架抑制、去異步干擾以及信息碼位檢測[1],最終將應答數據上報至二次雷達數據處理單元。
當多個目標近距離飛行時,會出現目標應答交織,產生碼位占據,正常的應答碼位幅度會發生畸變,若只基于幅度特征解碼會導致虛假框架以及虛假碼位,此時需基于相位特征[2]和幅度特征共同完成應答框架和信息碼位的脈沖檢測。但是實際工程中,因受噪聲和多徑干擾的影響,在交織下,單次解碼完成的身份代碼的可靠性不高。故在有效波束范圍內多次詢問,以多次應答來綜合提高身份代碼的可靠性。在點跡凝聚過程中,對位置相關成功且滿足時限和應答次數要求的節點進行身份代碼的處理。傳統方法是統計應答代碼相同次數,以次數最多者作為最終目標的身份代碼。在軍航試飛區或民航飛機密集區,上述方法仍會出現提取錯誤代碼和高度的現象。
2 一種二次雷達身份代碼聚合提取的方法
針對上述問題,本文提出,譯碼模塊在成功檢測到應答框架時,需把檢測到的身份代碼、碼位的應答幅度、應答框架脈沖是否前后交織串擾、每個碼位是否占據串擾的情況均置上標志位,然后上報至數據處理單元,由數據處理單元對多次應答的真實情況進行聚合處理。
數據處理單元接收到每一次的譯碼數據后,根據應答碼和碼位幅度進行碼位置信度標記。每個碼位分為1碼和0碼,同時計算出1碼置信度高置信度(S1H)、1碼置信度低置信度(S1L)、0碼置信度高置信度(S0H)、0碼置信度低置信度(S0L)。以C1碼位為例,當譯碼數據中給出的C1碼位值為1,C1碼位的幅度值為a1,參考脈沖(F1/F2)幅度為a0,1碼的高低置信度判斷準則如表1所示。當譯碼數據中給出的C1碼位值為0,C1碼位幅度值為a1,0碼的高低置信度判斷準則如表1所示。
本次的譯碼數據與緩存的點跡節點位置相關成功則緩存本次譯碼數據所攜帶的信息,若不成功則新建點跡節點。當點跡節點同時滿足時限和相關次數要求,則進行點跡信息處理,其中包括身份代碼的獲取。若點跡節點滿足時限性但不滿足相關次數要求,則清除該點跡節點。
上報的身份代碼獲取是將位置相關成功的所有應答數據,根據應答模式(M1、M2、M3、MC)進行歸類,獲取攜帶的代碼信息、1碼置信度、0碼置信度、譯碼框架同步串擾標志、碼位同步串擾標志和單個模式的應答次數。再根據攜帶信息,對每次應答的每個碼位進行1碼和0碼打分,最后統計出該模式所有應答的分數值,計算公式如下:

式(1)中:f1為碼位的1碼分值;f0為碼位的0碼分值;n為單個模式次數;S1為每次應答單個碼位的1碼分值;S0為每次應答單個碼位的0碼分值。
若f0<f1<2×f0則對應碼位值為1且為低置信度,若f1≥2×f0則對應碼位值為1且為高置信度;若f1<f0<2×f1則對應碼位值為0且為低置信度,若f0≥2×f1則對應碼位值為0且為高置信度。依次對12個信息碼位進行上述處理,從而得到最終點跡上報的身份代碼和代碼置信度。若是高度碼的處理需要先進行“五周期循環碼”判斷后,再按照上述提到的方法繼續處理。
在打分處理前,統計出應答數據內每個碼位出現碼位串擾的概率,以便使用不同打分機制和分值。若碼位為0(或1)且碼位串擾概率為0%時,其打分流程如圖3所示;若碼位為0且碼位串擾概率大于0%時,其打分流程如圖4所示;若碼位為1且碼位串擾概率大于0%時,其打分流程如圖5所示。
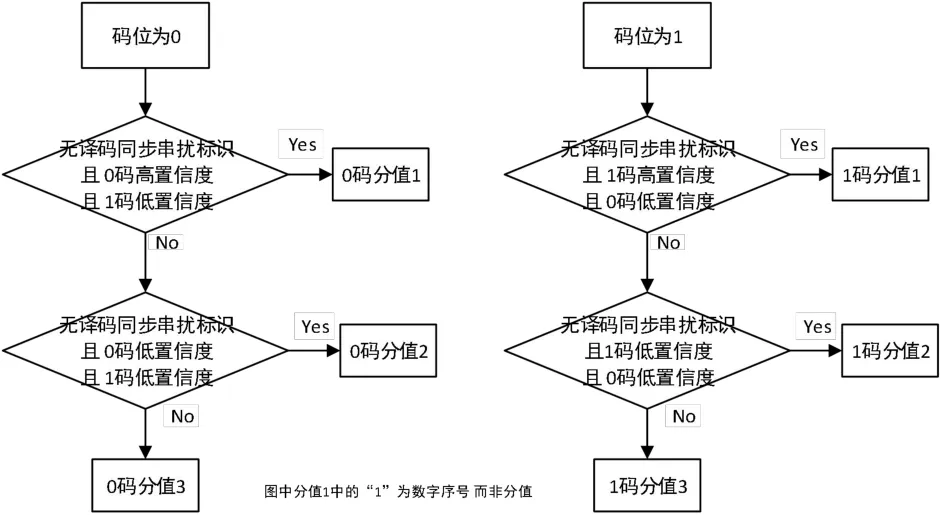
圖3 0碼/1碼無串擾打分機制
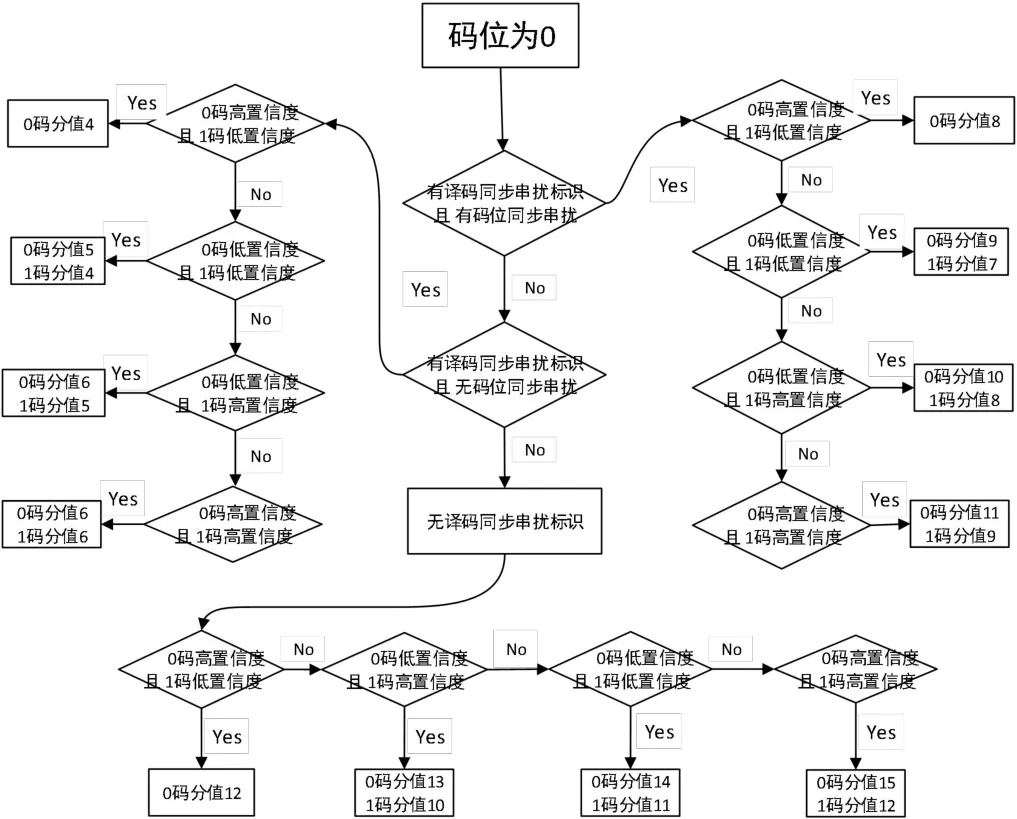
圖4 0碼有串擾打分機制流程圖

圖5 1碼有串擾打分機制流程圖
3 工程實現
在工程實踐中,通過C語言實現上述方法,大幅提升了交織應答的代碼準確率,目前已在實際工程中應用。工程中采集的某一圈目標應答數據(只提取了M3/A應答數據)以及處理結果如圖6所示。在無串擾應答的情況下,基于幅度和相位特征可以準確獲取應答信息,采用傳統方法獲取身份代碼。針對有串擾應答的情況下,采用本文提出的方法,能夠兼顧處理實時性,提高代碼和置信度的準確率。

圖6 實際空中應答處理示例圖
4 結束語
本文通過對應答數據信息進行多次聚合處理,根據應答的身份代碼、碼位幅度、框架串擾標志、碼位串擾標志、1碼位置信度、0碼位置信度,分別對每個碼位進行打分統計,反映了目標在波束內的真實應答過程,在應答信號局部交織的情況下,可有效提升代碼和置信度的準確率;對應答信號全交織的情況下,可準確得到代碼碼位置信度。為后續航跡處理過程中對點航跡相關和代碼糾錯有著至關重要的作用。
通過數據分析與比較,本文中的應答代碼聚合提取的方法能在一定程度上提升準確率,改善二次雷達設備性能。此方法是以應答碼的幅度采樣為基準,故還需設備前端降低接收機噪聲,提高準確性。
