基于工業物聯網架構的鐵路數據中心智能巡檢系統
2022-01-04 01:29:58樂建煒潘紅芹胡小寧
鐵路計算機應用 2021年12期
樂建煒,潘紅芹,胡小寧,付 航,王 鵬
(1. 中國鐵路信息科技集團有限公司,北京 100844;
2. 中鐵信弘遠(北京)軟件科技有限責任公司,北京 100038;3. 中鐵信大數據科技有限公司,天津 301737)
近年來,工業物聯網技術日臻成熟,其將工業生產中的設備與網絡相連接,實現智能化生產、監測、監控管理等功能。工業物聯網深度融合了物聯網、第五代移動通信(5G,5th Generation Mobile Communication)、云計算、人工智能等技術,具有實時性、智能性、安全性和信息互通性的特點,可以有效提升信息系統的智能化水平。
1 研究現狀
國內關于工業物聯網和機房智能巡檢系統的研究已取得多項成果,秦鵬[1]對機房運維三維可視化系統進行了設計與實現,并提出了優化措施。黃廣山[2]介紹了5G技術背景下的工業物聯網架構 。許雪荷[3]分析了國內外工業互聯網幾種發展模式的優劣。文獻[4-5]開發了包含二維與三維場景的可視化系統。張玄等人[6]對機房運維可視化系統的自動巡檢功能進行性能優化。羅智海等人[7]設計了基于二維碼識別的移動終端巡檢系統,提高了巡檢的質量和效率。李威等人[8]采用多種算法進行誤差消除,實現了高精度的室內實時定位系統。
上述文獻分別闡述了工業物聯網架構、二維和三維可視化,以及基于通信技術的移動、自動巡檢技術。本文對以上技術進行相關融合,設計了基于工業物聯網架構的鐵路數據中心智能巡檢系統(簡稱:本文系統)。
2 系統設計
2.1 系統架構
基于工業物聯網的設計思想,本文系統由數據采集層、通信層、分析預警層和展示層組成,包括三維展示系統、智能巡檢平臺、專用通信系統、移動巡檢系統、室內定位系統、機器人巡檢系統和智能陪伴系統7個子系統。本文系統架構如圖1所示。

圖1 本文系統架構
2.2 智能巡檢平臺
智能巡檢平臺包括智能巡檢系統和機器人巡檢系統。智能巡檢系統體現了 “規范人、輔助人、替代人”的設計思想。鐵路數據中心的巡檢人員身穿集成了室內定位標簽、視頻記錄儀、巡檢終端等職能巡檢設備的巡檢馬甲進行巡檢,通過專用通信網,上報位置和巡檢信息。機器人巡檢系統可以實現無人狀態下的全自動巡檢。智能巡檢平臺接收巡檢人員和機器人回傳巡檢數據,進行統計分析和預警。
3 系統功能
3.1 三維展示系統功能
三維展示系統根據數據中心樓層機房的物理環境、各類設備設施的部署情況建立三維場景,用戶可以在三維場景中獲得實時巡檢和監控數據,掌握巡檢人員、機器人的實時位置、狀態和報警信息。三 維展示系統的功能結構如圖2所示。

圖2 三維展示系統的功能結構
3.1.1 告警分布
告警分布能夠將數據中心所有告警信息在三維場景上進行實時展示,顯示范圍分為園區、樓層、機房和機柜。告警分布示意如圖3所示。

圖3 告警分布示意
3.1.2 訪客信息
訪客信息能夠實時顯示非本單位作業人員在鐵路數據中心的作業位置和作業狀態,具有機房作業安全、風險點、作業內容、應急報警方法等提示功能,有助于提升機房作業安全水平。
3.1.3 巡檢信息
3.1.5 巡檢人員信息
巡檢人員信息是指在實時展示巡檢過程中,將鼠標指針移動到系統中人員標志時,系統能夠展示當前巡檢人員的基本信息。
3.1.6 巡檢機器人信息
巡檢機器人信息是指在實時展示巡檢過程中,將鼠標指針移動到系統中機器人標志時,系統能夠展示當前巡檢機器人的相關信息及其巡檢信息。
3.1.7 巡檢視頻
巡檢視頻能夠實時顯示巡檢人員和巡檢機器人所采集的畫面,并支持回放。
3.1.8 巡檢計劃設置
巡檢計劃設置是指在巡檢開始前,根據本次巡檢的實際需求,制訂巡檢人員和巡檢機器人的巡檢計劃。
巡檢信息能夠實時顯示巡檢人員在數據中心的具體位置和巡檢信息。同時,巡檢信息還可以調取巡檢記錄儀和巡檢機器人拍攝的實時畫面,展示各個傳感器采集的溫度和濕度、指示燈狀態等監控數據 和巡檢信息。
3.1.4 環境信息
環境信息能夠實時顯示來自巡檢人員、機器人和其他動環監控系統采集的環境信息,以熱力圖的形式在三維場景中展現(如溫度、濕度等)。
3.1.9 巡檢路徑設置
巡檢路徑設置是指在巡檢開始前,根據本次巡檢的實際情況及巡檢計劃,設置巡檢人員和巡檢機器人的相對優化的巡檢路徑。
3.2 智能巡檢系統功能
智能巡檢系統是智能巡檢平臺的核心,具有機房管理、告警管理、人員管理、機器人管理、訪客管理等功能,能夠提高機房的巡檢頻次,降低安全風險。管理人員可根據需求,通過智能巡檢系統設定人工巡檢和機器人巡檢計劃,也可將原有人工巡檢計劃變更為巡檢機器人巡檢計劃,讓機器人根據計劃自動執行機房巡檢任務。智能巡檢系統功能架構,如圖4所示。

圖4 智能巡檢系統功能架構
3.2.1 機房管理
機房管理具有設備設施管理和資產統計功能。設備設施管理能夠實現數據中心機柜、信息技術設備、網絡設備、配線架、機柜配件、空調、不間斷電源(UPS,Uninterruptible Power Supply)、配電柜、電源分配組單元(PDU,Power Distribution Unit)等設備設施的數據維護。資產統計能夠實現資產的到貨、出/入庫、上/下架、連線、上/下線、盤點、調撥、報廢等操作。
3.2.2 告警管理
告警管理包括告警設置和告警歷史查詢,可以實現告警的設置、屏蔽管理、確認流程、工單跟蹤等操作。
3.2.3 人員管理
人員管理包括巡檢計劃和巡檢記錄功能。用戶可以制訂人工巡檢計劃,對歷史巡檢記錄進行查詢和統計。
3.2.4 機器人管理
機器人管理包括機器人巡檢計劃和巡檢記錄功能,負責制訂機器人巡檢計劃和查詢歷史巡檢記錄。機器人管理可以將人工巡檢任務切換成機器人巡檢,同時支持遠程查看機器人的狀態和遠程語音等功能。
3.2.5 訪客管理
訪客管理包括訪客登記和訪客歷史記錄。在無關人員進入巡檢區域時,這些人員需要進行訪客登記。訪客管理留存訪客登記信息,生成訪客記錄,便于后期追溯。
3.2.6 歷史數據
歷史數據包括機器人歷史數據、巡檢人員歷史數據和操作記錄,記錄并保存他們的巡檢信息及其操作記錄。
3.2.7 報表管理
報表管理包括報表規則設置和報表導出。報表規則設置是指對報表的各項內容進行填報設置,填報時需按照設置的規則進行,其他填報格式無效。報表導出能將已正確填報的報表進行導出。
3.2.8 平臺設置
平臺設置包括用戶管理、權限設置和服務器設置,是管理員對用戶的增刪改查,以及為不同用戶分配不同權限的設置,同時可對服務器進行擴容等相關設置。
3.3 專用通信網絡功能
在數據中心搭建基于5G技術的專用通信網絡,實現移動巡檢系統、機器人巡檢系統和智能陪伴系統數據的實時且高速傳輸。同時,專用通信網絡能夠確保巡檢數據“不出園區”,網絡傳輸安全可靠,避免了遭受來自外部的網絡攻擊。
專用通信網絡具有100個視頻監控點位,包括智能陪伴系統和巡檢機器人攜帶的高清攝像頭。每個視頻點位的分辨率為1 920×1 080像素。在極限狀態下,專用通信網絡支持100個視頻監控點位并發傳輸數據。
3.4 移動巡檢系統功能
移動巡檢系統由手持式智能巡檢終端和后臺管理系統組成。
3.4.1 智能巡檢終端功能
智能巡檢終端支持巡檢人員以拍攝、掃碼的形式錄入巡檢設備信息,進行巡檢工作,代替了傳統的手寫巡檢工單的模式。巡檢人員通過智能巡檢終端的智能巡檢軟件掃描機柜和設備的二維碼,拍攝儀器儀表顯示讀數,并通過相關軟件自動識別后者的讀數。這些信息經巡檢人員確認后,自動生成巡檢工單并實時上傳至后臺管理系統。所上傳的工單支持修改及再次上傳。在巡檢工單生成過程中,智能巡檢終端還可以對帶有閾值的信息項設置智能提醒。
3.4.2 后臺管理系統功能
后臺管理系統可以實時或定時接收智能巡檢終端上傳的巡檢工單和相關數據,進行數據統計和自動預警,并自動導出巡檢報表。后臺管理系統的功能架構如圖5所示。
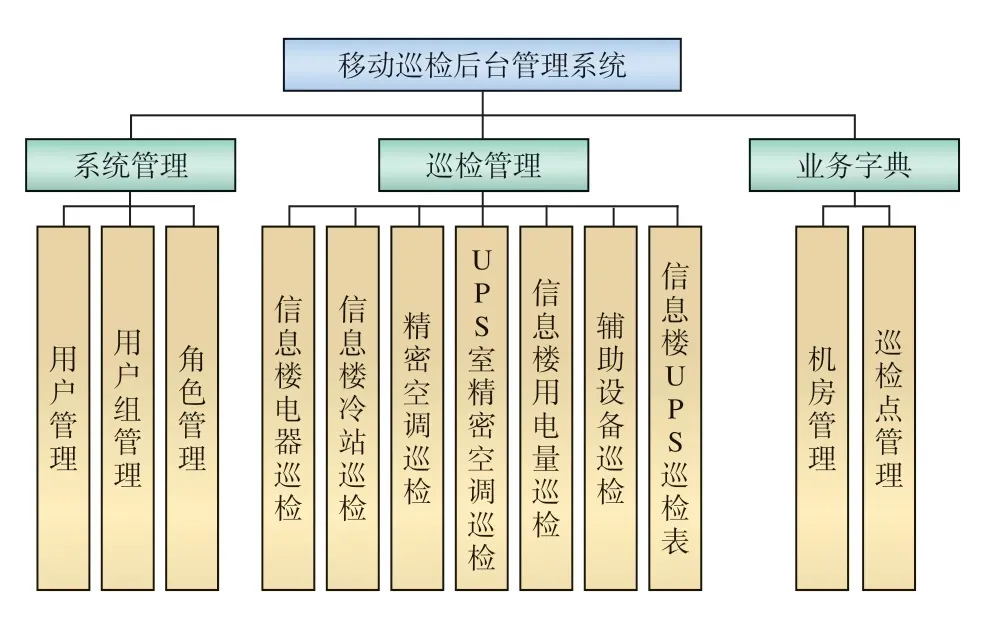
圖5 后臺管理系統功能架構
3.5 室內定位系統功能
在眾多的室內定位技術中,超寬帶(UWB,Ultra Wide Band)技術具有抗干擾能力強、傳輸速率高、安全性高、系統結構相對簡單等特點。本文基于UWB技術,設計了一套適用于鐵路數據中心巡檢人員的室內定位系統(簡稱:室內定位系統)。
室內定位系統利用鐵路數據中心作業人員佩戴的定位標簽,實現對數據中心巡檢、作業人員和訪客的高精度室內定位,并提供作業行動軌跡、作業范圍電子圍欄設置等功能。室內定位系統能夠使用戶全面掌握鐵路數據中心各類作業人員的實時位置。當突發事件發生時,室內定位系統有助于及時引導有關人員到達作業地點,提升鐵路數據中心的作業安全水平和應急響應速度。
3.6 機器人巡檢系統功能
機器人巡檢系統由信息機房巡檢機器人、電力機房巡檢機器人和環境巡檢機器人,以及配套軟件組成。信息機房巡檢機器人能夠對每個機柜指示燈、儀表和環境情況進行監控。電力機房巡檢機器人可以對配電柜、UPS設備、相關設備設施的儀表及指示燈、局部放電等情況進行自動巡檢。環境巡檢機器人可以完成鐵路數據中心的巡檢、作業人員監控、應急滅火等任務。機器人巡檢系統通過網絡隔離設備與其他系統進行雙向數據交互,具體如圖6所示。
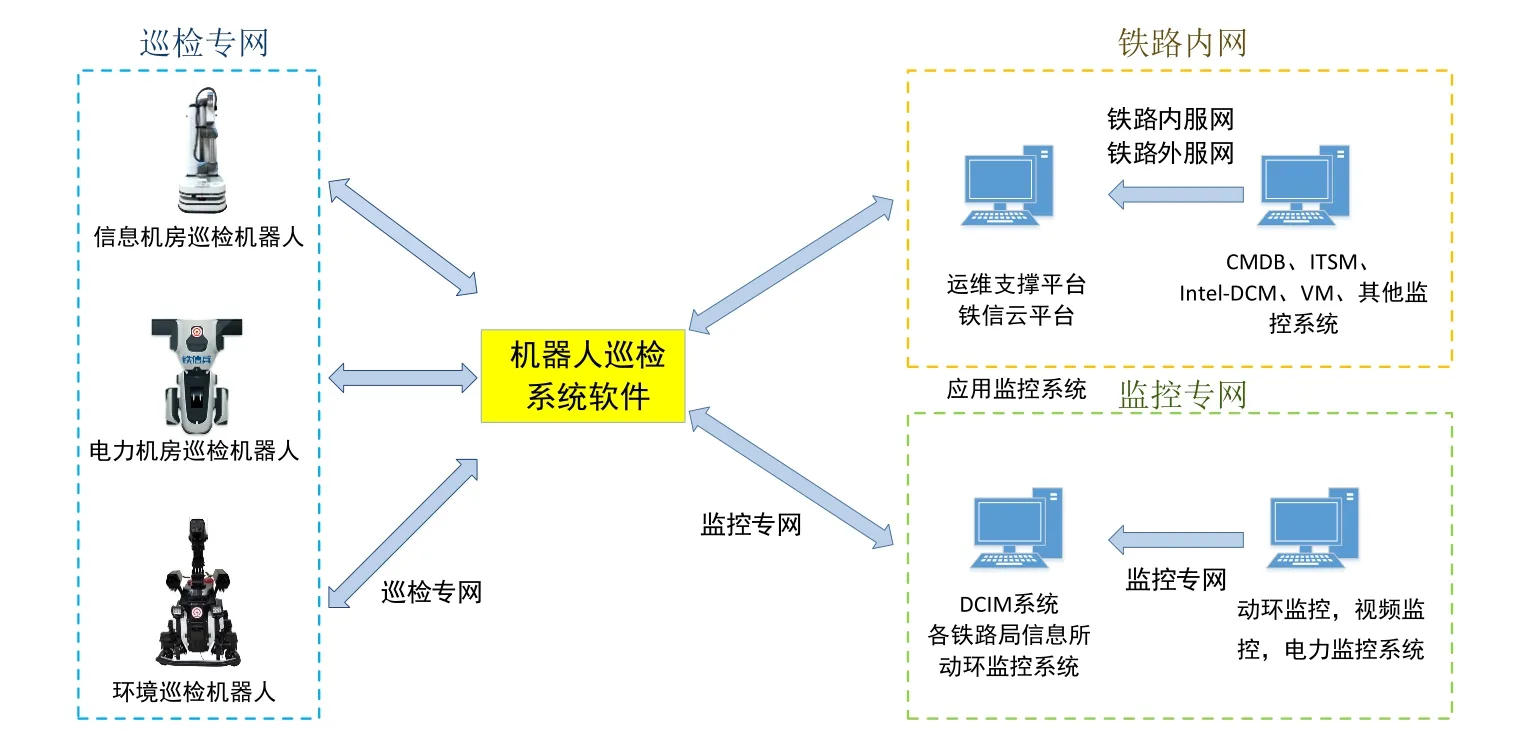
圖6 智能機器人巡檢系統與其他系統的數據交互
3.7 智能陪伴系統功能
智能陪伴系統由具有錄音錄像和實時傳輸功能的巡檢記錄儀和配套軟件組成。巡檢人員佩戴巡檢記錄儀進行巡檢,在此過程中,巡檢記錄儀將拍攝畫面進行實時反饋,方便技術專家遠程解決。當巡檢過程完成后,巡檢記錄儀能夠將巡檢記錄導入存儲設備,為后期復查提供依據。
4 關鍵技術
4.1 專網通信技術
通信技術是工業物聯網的基礎,各種智能巡檢設備運行時會產生大量圖像、視頻和文本類數據。本文設計的智能巡檢系統通過在鐵路數據中心內部建設基于5G技術的專用通信網絡,實現了巡檢圖像視頻數據的快速傳輸。5G技術可以實現1 Gbit/s的傳輸速度,每秒可傳輸約50張巡檢照片和大小為100 MB的視頻文件,實現巡檢圖像、視頻和數據的快速下載和分析。
根據鐵路數據中心對網絡安全、傳輸時延、上下行帶寬的需求,專用通信系統采用5G技術+移動邊緣計算(MEC,Mobile Edge Computing)的設計,具體包括在鐵路數據中心內部部署室內分布設備,保障區域內網絡覆蓋,在核心機房或配電間部署室內基帶處理單元(BBU,Building Base band Unit)設備和MEC設備,確保巡檢數據不離開鐵路數據中心,在內部完成循環。其中,BBU設備通過無線接入網連接至核心網,用于信令數據傳輸和接入權限許可。專用通信網絡的拓撲結構如圖7所示。
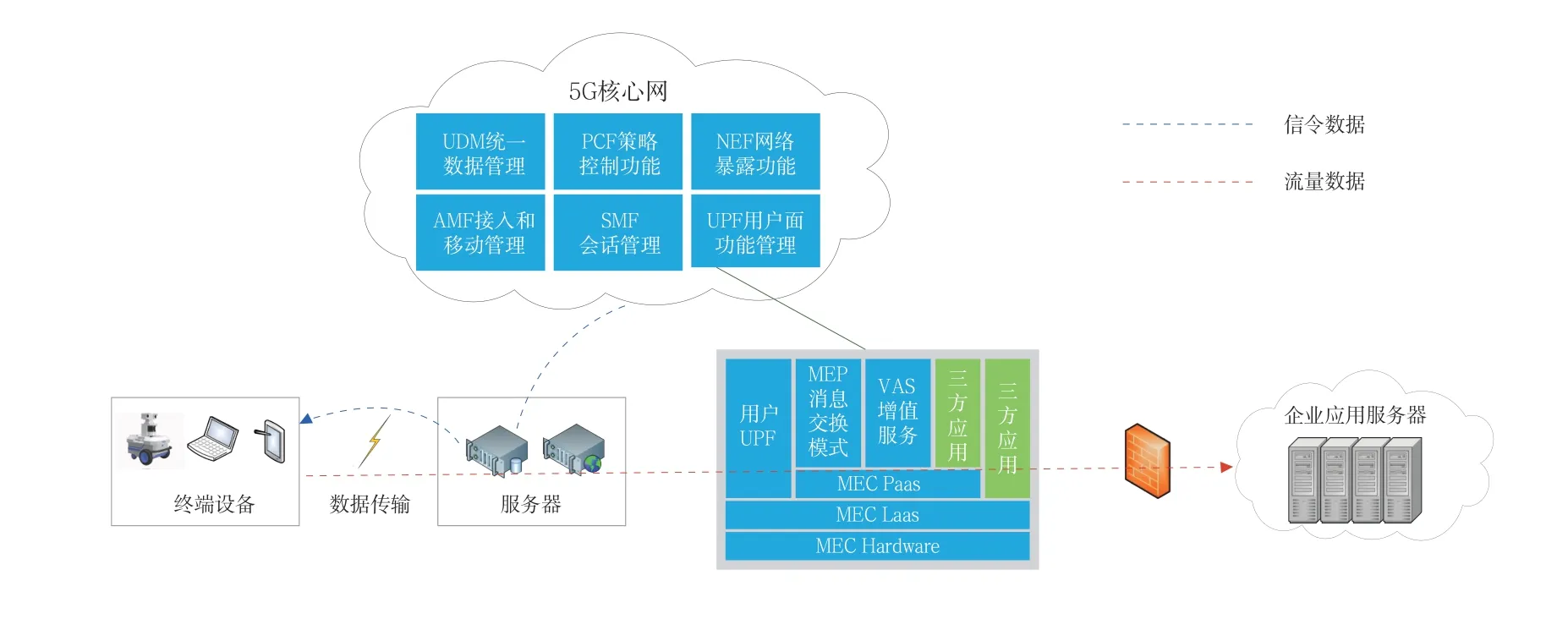
圖7 專用通信網絡拓撲結構
4.2 數據中心機器人巡檢技術
4.2.1 基于激光雷達的SLAM自主導航技術
本系統采用基于激光雷達的同步定位與地圖構建(SLAM,Simultaneous Localization and Mapping)自主導航技術,實現了巡檢機器人在機房內的定位導航。SLAM通過傳感器獲取的信息來進行當前位置的推算、軌跡估計與環境建圖。
激光雷達可對周圍物體實現360°全方位掃描測距,其采集的物體信息呈現出一系列分散的、具有準確角度和距離信息的點,這些點被稱為點云。通常SLAM自主導航技術通過對不同時刻兩片點云的匹配與比對,計算目標物體相對運動的距離和姿態(角度)的變化,完成對機器人的定位。
SLAM自主當航技術包含感知、定位和建圖3個過程,具體如下。
(1)感知:機器人通過傳感器(激光雷達或視覺傳感器)獲取周圍的環境信息。
(2)定位:通過傳感器實時獲取自身位置及姿態(角度)。
(3)建圖:根據自身位置及傳感器獲取的信息,描述出當下所在環境的地圖
感知是SLAM自主導航技術的基礎,只有先感知周圍的環境信息,才能可靠確定定位及構建環境地圖。
4.2.2 基于六自由度機械臂的自定義巡檢技術
機械臂是機器人技術領域中使用最廣泛的自動機械裝置。它們可以接受指令并準確地定位三維(或二維)空間中的點以進行操作。六自由度機械手臂,顧名思義,由6個關節組成,由伺服電機機械臂驅動,具有人類的手臂和手腕類似的能力。巡檢機器人裝備了六自由度機械臂,可以對攝像機進行自定義角度設置,實現對機柜側面和頂部、機房地面和頂部進行全方位、無死角的巡檢,同時實現巡檢記錄實時回傳至控制中心,方便控制中心及時處置隱患與報警,形成信息閉環。這樣既能夠彌補機房監控系統的監控死角,也可以驗證與核查機房監控系統的工作狀態。機械臂還可以根據用戶需要,完成更復雜的操作。
4.3 基于人工智能的圖像識別與機器學習技術
4.3.1 圖像識別技術
圖像識別技術是人工智能的一個重要技術,能夠對圖像進行對象識別,以識別不同模式的目標。智能巡檢終端和巡檢機器人通過光學攝像機和紅外攝像機,基于圖像識別算法,可以對指針儀表讀數、指示燈顏色、設備線纜表面溫度進行自動識別,當有溫度高于正常范圍時自動預警,彌補人工讀數和人眼無法直接判斷溫度的不足,防止事故發生。
4.3.2 機器學習技術
基于機器學習算法,機房巡檢機器人可以在每次巡檢時,對機柜內每臺設備的指示燈狀態、儀表讀數、環境參數進行積累與學習,當識別出指示燈狀態或儀表讀數與平時不同時自動預警,及時處理故障和隱患。
5 結束語
本文針對鐵路數據中心人工巡檢工作存在的問題,設計了基于工業物聯網架構的鐵路數據中心智能巡檢系統,論述了該系統的設計架構和關鍵技術。經過現場試驗表明,本文系統實現了數據中心巡檢工作的智能化、自動化、可視化,提高了巡檢的效率和質量,降低了人工巡檢的工作強度,提升了鐵路數據中心運維工作的技術水平。下一步,本文將對智能巡檢算法和后續功能進行研究。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
少先隊活動(2021年4期)2021-07-23 01:46:22
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國科技論壇(2017年7期)2017-07-25 08:49:53
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
