新技術試驗衛星C 星、D 星姿軌控分系統設計和在軌驗證
2022-01-06 01:11:48陳占勝王世耀陳文暉徐家國
上海航天 2021年6期
關鍵詞:設計
陳占勝,杜 寧,王世耀,陳文暉,徐家國
(1.上海航天技術研究院,上海 201109;2.上海衛星工程研究所,上海 201109;3.上海航天控制技術研究所,上海 201109)
0 引言
隨著航天技術的快速發展,衛星姿態控制系統功能已由常規的穩定對地定向控制,逐步轉為基于載荷對衛星平臺需求的多種工作模式、多種目標指向控制。以對地觀測小衛星為例,受整星重量約束,載荷往往不具備視軸擺動等機械驅動功能,因此,可借助衛星平臺的姿態調整能力,并充分發揮載荷效能。為最大限度發揮載荷觀測精度,在保證姿態指向和姿態穩定度的基礎上,應具備光學載荷零偏流角和合成孔徑雷達零多普勒高精度導引控制等功能;為最大限度發揮載荷觀測效能,需進一步提升衛星姿態機動的敏捷性,并具備姿態規劃能力,做到能夠在有限的觀測弧段內快速調整載荷視軸指向,以大幅增加載荷觀測范圍。
新技術試驗衛星C 星、D 星由上海航天技術研究院研制,是為適應未來航天裝備體系快速響應和網絡互聯的發展趨勢而設計的。姿軌控分系統首次提出以最大功能包絡統一設計雙星軟件及地面測試系統的研制方案,通過一個軟件配置項實現雙星功能,解決了雙星研制周期短、工作模式復雜等問題。探索了基于操作系統的軟件并行開發模式,首次開展基于動態鏈接庫(Dynamic Link Library,DLL)的在軌編程設計,解決了使用國產操作系統帶來的在軌編程、多線程(Multi-Thrading,MT)劃分、優先級設計、共享內存交互、控制器局域網絡(Controller Area Network,CAN)通信延遲等一系列問題。“條帶拼接成像”和“動中成像”等模式兼顧偏流角跟蹤控制,在保證載荷觀測精度的同時,可大幅提升載荷對地觀測的效能。
本文對姿軌控分系統設計進行了詳細介紹,包括多目標凝視姿態基準通用化設計、成像模式姿態規劃和基于操作系統的姿軌控應用軟件架構設計等,并給出兩星在軌驗證情況。
1 分系統簡介
新技術試驗衛星C 星、D 星質量約390 kg,運行在500 km 高度的傾斜圓軌道。姿軌控分系統測量單機包括1 臺光纖陀螺組合、2 臺微型星敏感器、2臺0-1 式太陽敏感器、1 臺模擬式太陽敏感器和1 臺三軸磁強計等;執行機構包括4 臺反作用飛輪、3 臺磁力矩器和5 臺推力器。其中,4 臺姿控推力器斜裝,可同時控制衛星三軸姿態。
姿軌控分系統采用零動量飛輪控制方案,長期保持三軸對日定向姿態,根據程控指令進行姿態調整轉入任務模式。C 星需具備對地定向及任意姿態偏置、Ku 天線對高軌星凝視等功能;D 星需具備相機偏流角跟蹤、對地數傳天線(或星間高速天線)對地面站凝視和星間高速天線(或對地數傳天線)對簇內成員星凝視等功能。C 星、D 星要求三軸控制精度優于0.05°(3σ
),三軸測量精度優于0.01°(3σ
),三軸穩定度優于0.001(°)/s(3σ
);D 星繞任意空間軸姿態機動85°優于60 s。由于雙星姿態控制模式較多,若應用常規設計方法需要建立多個姿態控制基準,當載荷和目標的數量較多時,姿態基準設計算法快速增加,導致程序流程分支較多并且代碼復雜。因此,有必要研究姿態基準的通用設計方法,一個控制姿態基準適用于多目標指向任務,以提高系統開發和測試效率。此外,姿軌控應用軟件與管理軟件、星務軟件共同運行在綜合電子計算機內,基于“風云翼輝”國產操作系統并行開發與調試,相比于傳統的系統軟件開發模式,需重新進行應用軟件架構設計和在軌編程方案設計。控制模式及轉換如圖1 所示。
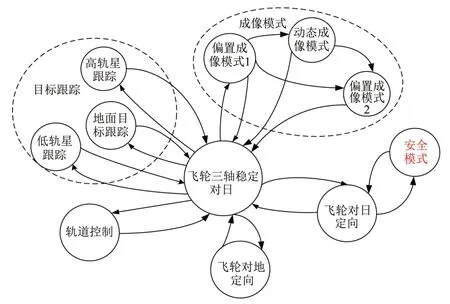
圖1 控制模式及轉換Fig.1 Control modes and conversion
2 姿軌控分系統方案設計
2.1 任意目標凝視姿態基準設計
針對各載荷分別對高軌星、低軌星和地面站等目標凝視跟蹤需求,新技術試驗衛星C 星、D 星姿軌控分系統采用統一方法構建各目標凝視參考坐標系,控制衛星本體坐標系與參考坐標系平行,即可實現載荷視軸對目標凝視跟蹤,如圖2 所示。
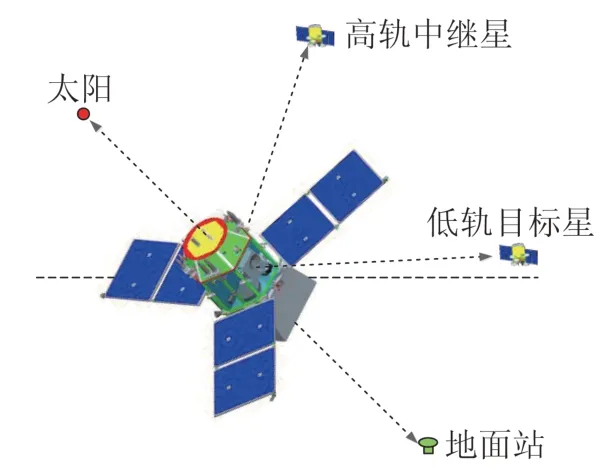
圖2 任意目標凝視跟蹤Fig.2 Gaze tracking of an arbitrary target
設計各目標凝視參考坐標系時,除目標方向矢量外,還需選取另一空間矢量,該空間矢量須避免與目標矢量平行。對于地面目標矢量,空間物理關系決定衛星軌道面的法線不會與之接近平行;對于多個空間目標的位置進行分析,若空間目標沒有位于衛星軌道面法線的±20°圓椎體內的,則可以確定衛星軌道面法線為空間基準矢量,這個空間矢量適用于為所有目標點建立姿態基準;若多個空間目標部分位于衛星軌道面法線的±20°圓椎體內,需再確定一個與軌道面法線垂直的矢量,如衛星軌道的飛行方向。由此確定出滿足要求的空間基準矢量X
和Y
。將衛星指向目標的方向定義為衛星目標坐標系的偏航軸(Z
),如果衛星軌道坐標系的俯仰軸Y
與衛星指向目標的單位矢量Z
的夾角在90°±70°范圍內,則有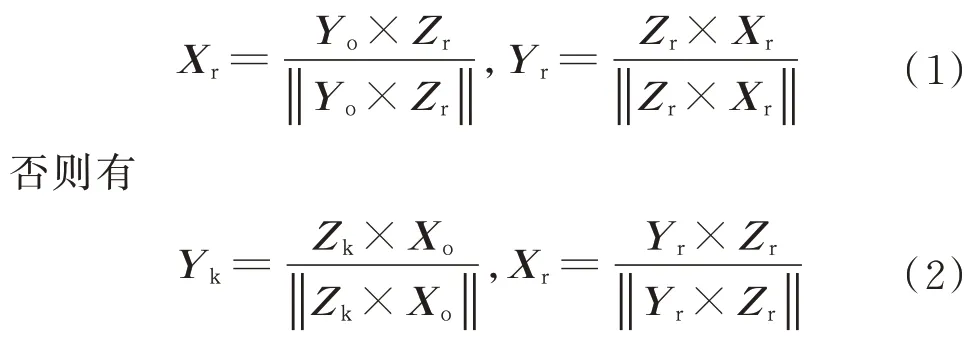
J2000 慣性坐標系至衛星目標坐標系的姿態轉換矩陣為

A
變換為姿態四元數q
,即為衛星目標坐標系相對于J2000 慣性坐標系的姿態四元數。結合載荷的安裝四元數為q
,得到衛星姿態基準四元數q
,
式中:?表示四元數乘法運算。
已知前后兩拍的載荷指向目標的姿態基準四元數q
和q
,根據四元數運動學方程,得到當前控制周期載荷指向目標的姿態基準角速度ω
,
完成期望姿態四元數和期望角速度計算后,根據敏感器測量解算的衛星當前姿態和角速度信息,進行姿態偏差和角速度偏差計算,進而調用遞階飽和PID控制器,即可實現任意目標定向或凝視跟蹤控制。
在通用姿態基準設計的基礎上,設計統一的程控指令格式,通過模式字區分具體任務姿態模式。程控指令包含任務模式字、高軌星編號、地面站經緯度和成像滾動與俯仰期望姿態等信息,見表1。
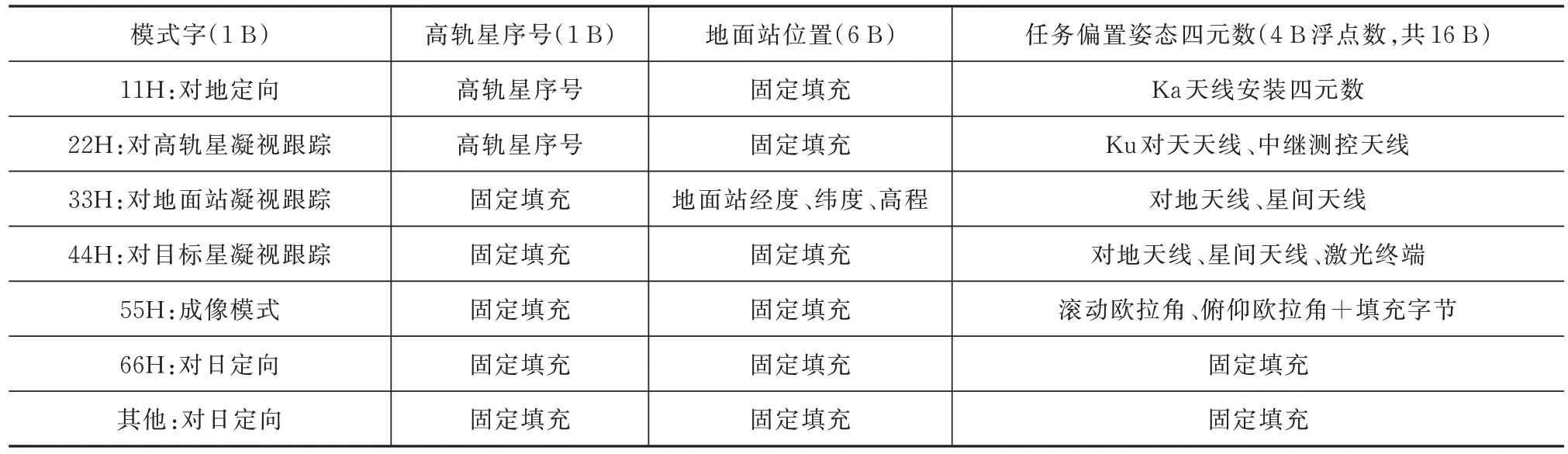
表1 姿軌控接收程控指令統一格式Tab.1 Unified programmed instruction format received on the attitude and orbital control system
2.2 條帶拼接與主動推掃成像控制
新技術試驗D 星主載荷為寬幅時間延時積分電荷耦合器件(Time Delay and Integration Charge Coupled Devices,TDICCD)相機,需通過條帶拼接實現單軌300 km×900 km 區域成像,此為典型條帶拼接成像問題,在衛星姿態偏置成像過程中,需具備高精度相機偏流角跟蹤控制功能。此外,主動推掃成像即衛星姿態機動過程成像功能,將通過在軌測試進行驗證。衛星快速姿態機動、快速穩定控制方法和偏流角跟蹤控制方法已進行了較為充分研究,此處重點描述條帶拼接與主動推掃成像模式的軟件接口設計。
2.2.1 多條帶成像
當程控模式字為0x77時,姿軌控分系統根據任務規劃模塊給出的衛星相對軌道坐標系滾動、俯仰成像姿態指令,進行姿態快速機動與快速穩定控制,并在姿態偏置的同時進行偏流角跟蹤控制。成像模式允許多次設置成像期望姿態,因此,可實現同軌多條帶、條帶拼接、立體成像等多種成像工作模式,如圖3所示。
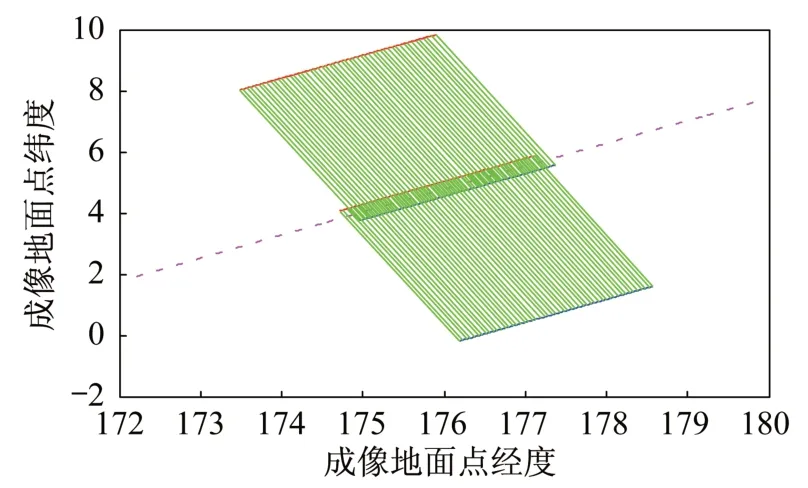
圖3 雙條帶成像Fig.3 Double strip imaging
2.2.2 主動推掃成像
當程控模式字為0x5B 時,根據地面上注的主動推掃成像姿態初值和推掃角速度,進行姿態機動過程成像,如圖4 所示,其中,推掃角速度根據相機行頻約束進行設計。以新技術試驗D 星滾動軸機動成像為例,相對軌道系回擺姿態初值分別為45、50、90,相對軌道系擺掃角速度為-0.6(°)/s 和-0.70(°)/s,擺掃時間120 s,相機正向積分,擺掃后20 s 開始成像至120 s。
圖4 滾動擺掃成像Fig.4 Rolling swing-broom imaging
2.3 基于國產操作系統的應用軟件設計
基于操作系統開發姿軌控應用軟件,需將姿軌控進程劃分為MT,并與管理軟件約定各線程優先級。此外,由于操作系統負責內存動態管理,應用軟件難以獲取各變量內存地址,常規在軌編程方案不再適用,因此,需進行基于操作系統的姿軌控軟件架構設計和在軌編程設計。
2.3.1 姿軌控軟件架構設計
新技術試驗衛星C 星、D 星姿軌控應用軟件采取以下技術方案:以SMD 架構設計基于操作系統的姿軌控應用軟件,以狀態機(State Machine,SM)完成姿軌控各運行模式的靈活切換和運轉,如圖5 所示。
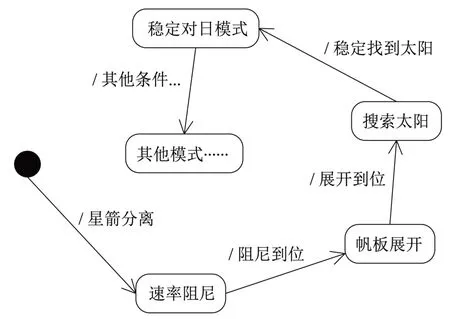
圖5 狀態機的運行Fig.5 Operation of the state machine
以MT 完成姿軌控應用軟件多任務處理,通過DLL 實現模塊可替換。
SM 方法以一種狀態代表一種工作模式,狀態的進入條件作為模式啟動條件,狀態的退出條件作為模式結束條件,并流轉到下一個模式。通過狀態的不斷流轉和循環,完成整個系統的功能,同時增加一個功能,不影響其他功能模塊,提高了軟件的擴展性和維護性。MT 方法將整個姿軌控應用劃分為多個線程,即主任務線程、總線數據處理線程、測試數據處理線程等,線程劃分如圖6 所示。
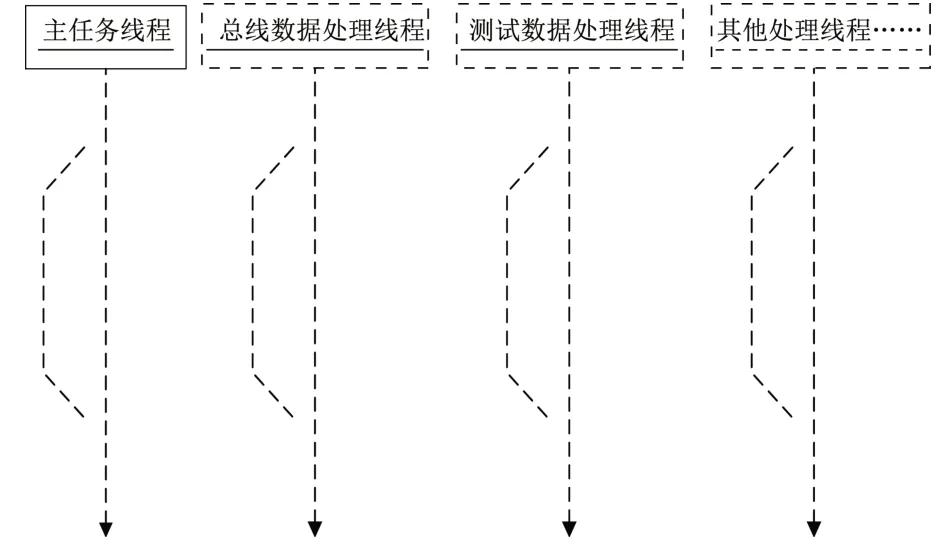
圖6 多個線程劃分Fig.6 MT partition
從而讓各線程專職做一項事務,并通過線程間交互完成信息的傳遞和處理,以簡化多任務的協調。DLL 方法將軟件功能劃分為多個組合,并將這些組合封裝成DLL 形式,供主體姿軌控軟件調用。庫的封裝性能便于測試和影響域控制,通過庫的替換易于實現軟件在軌升級。
2.3.2 姿軌控軟件的在軌編程設計
新技術試驗衛星C 星、D 星軟件基于實時操作系統和Flash+Sram 存儲,依據文件系統替換姿軌控軟件的各個功能,實現星上姿軌控軟件的功能完善和擴展。
姿軌控軟件在軌編程主要基于庫文件替換,因此,各庫文件需要保持大小均勻、層次合理和結構清晰的特征。軟件庫文件劃分如圖7 所示。
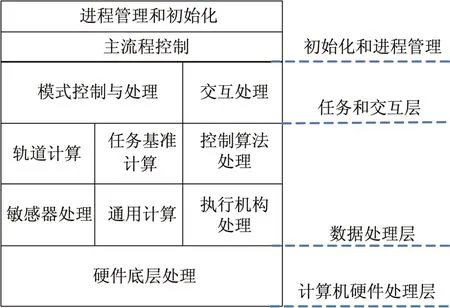
圖7 姿軌控軟件庫文件劃分Fig.7 File division of the attitude and orbit control software library
姿軌控軟件一共分為4 層10 個庫文件:最高層是主程序文件,主要負責初始化、進程管理以及主流程控制;高層庫文件主要負責模式和對外交互功能;中層庫文件是數據處理層庫文件,包括軌道計算、任務基準計算、控制算法、敏感器、執行機構以及通用計算等部件;低層庫文件是計算機硬件處理層,如CAN 通信、422 通信等功能。各邏輯庫文件可以進一步劃分為更小及滿足要求的庫文件。
在軌編程流程如圖8 所示,當主線程啟動后,每個控制周期都去查詢在軌編程標志,以確定是否需要在軌編程。如果收到在軌編程標志,則退出主程序,程序復位,使用新的文件開始運行姿軌控軟件。在上注時,應用程序根據校驗位是否正常,確定每個注數包是否正確。根據包總數,確定所有包是否都上傳成功。所有包都上傳成功后,則用上傳成功的庫文件替換原有的庫文件,原有的庫文件作為前序版本。
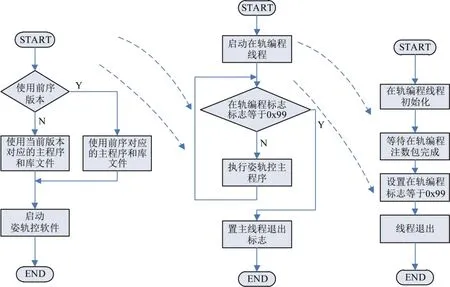
圖8 在軌編程流程Fig.8 On-orbit programming process
3 在軌驗證情況
新技術試驗衛星C星、D星于2020年2月20日入軌后,姿軌控分系統依次正確進入噴氣速率阻尼、噴氣對日定向、飛輪對日定向等模式。此后,長期運行在三軸對日定向模式下,可根據程控指令轉入任務模式,并自主返回對日定向模式。2020 年8 月9 日C 星對地定向模式的三軸姿態和角速度誤差曲線如圖9 和圖10 所示,姿態控制誤差小于0.002°(3σ
),穩定度優于0.000 6(°)/s(3σ
)。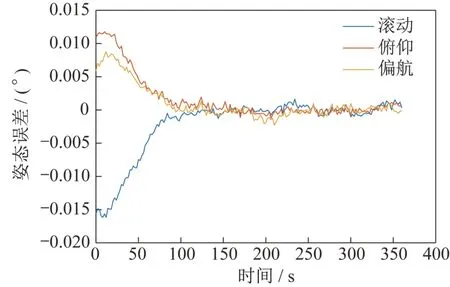
圖9 C 星對地定向姿態誤差Fig.9 Control error of earth oriented attitude angle for Satellite C
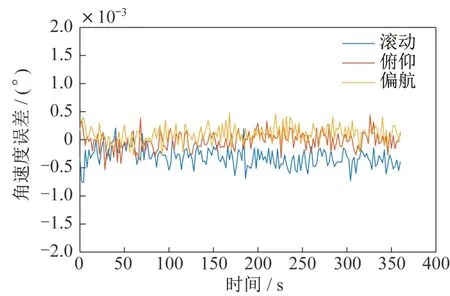
圖10 C 星對地定向角速度誤差Fig.10 Control error of earth oriented attitude angular velocity for Satellite C
2020 年2 月26 日D 星成像模式衛星姿態角和姿態控制誤差曲線如圖11 和圖12 所示,成像過程姿態控制精度優于0.002°(3σ
),相機偏流角優于0.05°(3σ
),偏流角遙測由相機載荷根據衛星姿態和角速度信息計算得出。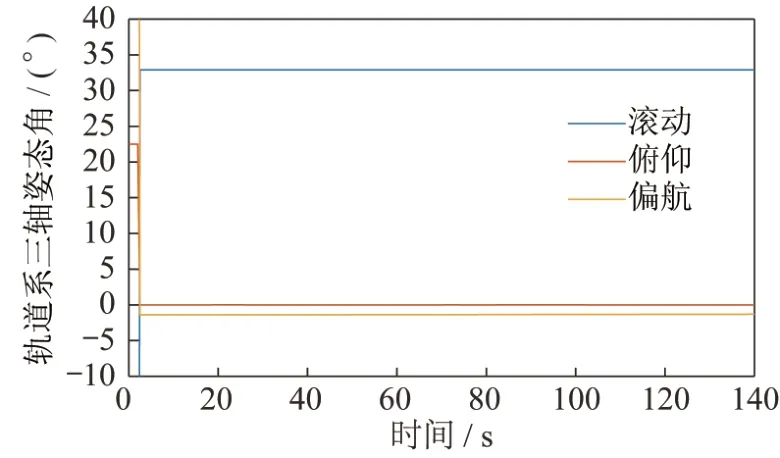
圖11 D 星成像模式姿態角Fig.11 Attitude angle during scan imaging for Satellite D
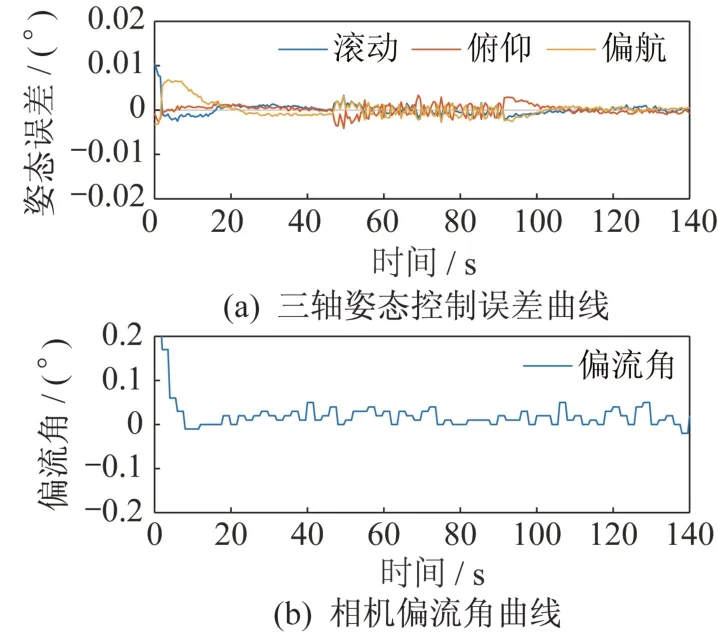
圖12 D 星成像模式姿態與偏流角誤差Fig.12 Control errors of attitude angle and drift angle during scan imaging for Satellite D
2020 年2 月25 日D 星數傳天線凝視地面站模式衛星姿態角和姿態誤差曲線如圖13 和圖14 所示,動態跟蹤過程姿態控制誤差小于0.005°(3σ
)。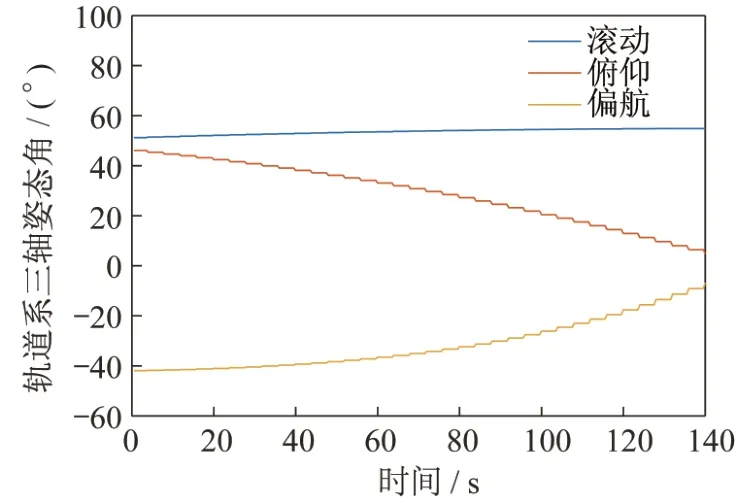
圖13 D 星地面站跟蹤姿態角Fig.13 Attitude angle during ground station tracking for Satellite D
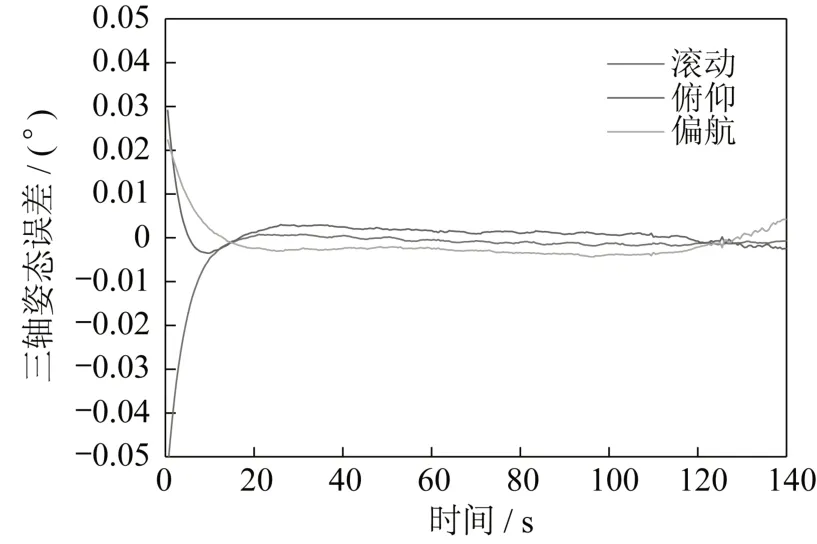
圖14 D 星地面站跟蹤姿態誤差Fig.14 Control error of attitude angle during ground station tracking for Satellite D
2020年8月10日C星Ku天線凝視高軌(Geosynchronous Earth Orbit,GEO)衛星模式下衛星姿態角和姿態誤差曲線如圖15 和圖16 所示,動態跟蹤過程姿態控制誤差小于0.002°(3σ
)。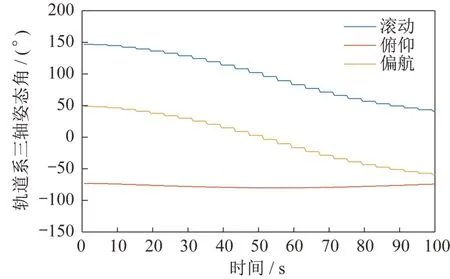
圖15 C 星高軌星跟蹤姿態Fig.15 Attitude angle during GEO satellite tracking for Satellite C
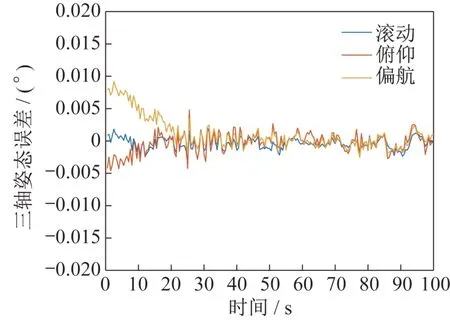
圖16 C 星高軌星跟蹤姿態誤差Fig.16 Control error of attitude angle during GEO satellite tracking for Satellite C
D 星各軟件模塊當前版本如圖17 所示。陀螺和星敏模塊相比衛星發射狀態版本10 進行過在軌升級,軟件升級過程三軸姿態誤差小于0.5°并及時收斂,驗證了在軌編程方案的有效性。2020 年3 月1 日C 星計算機切至備份后自主恢復對日定向模式,如圖18 所示,三軸姿態控制正常,驗證了姿軌控軟件重要變量備份和讀取功能的正確性。
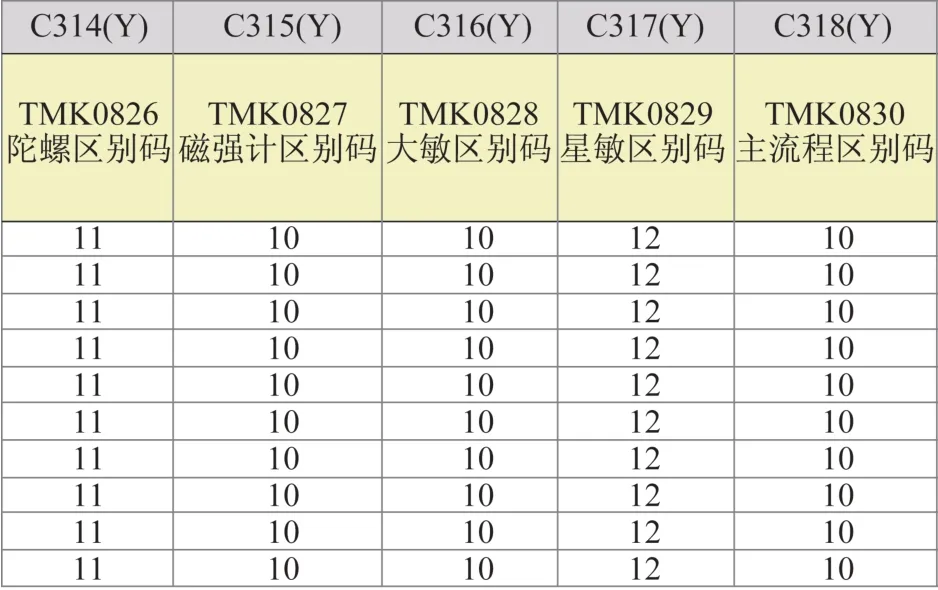
圖17 D 星姿軌控軟件庫版本Fig.17 Version of the attitude and orbit control software library for Satellite D
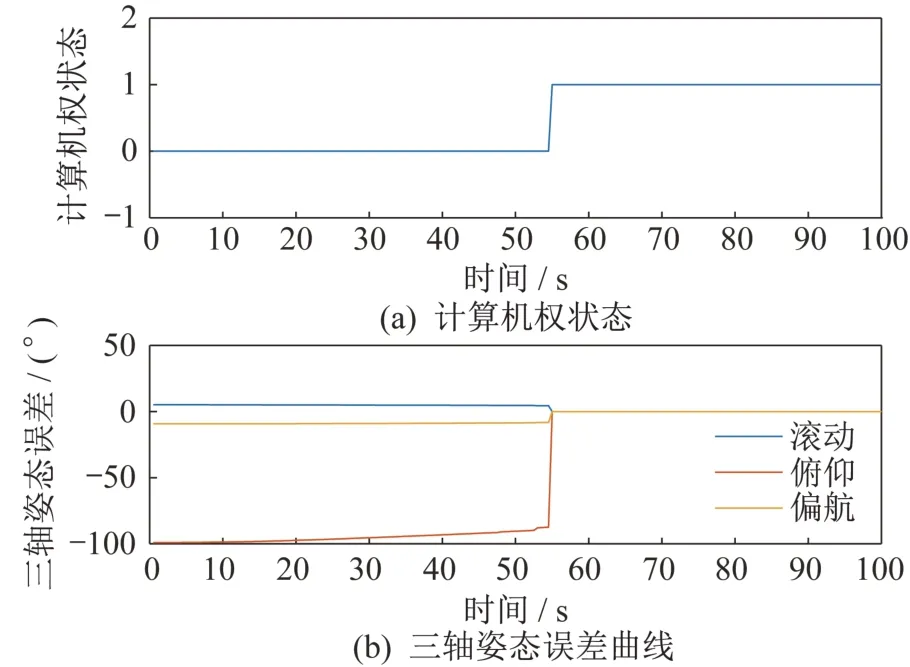
圖18 C 星切機后姿態自主恢復Fig.18 Automatic attitude recovery after switching control by Satellite C
4 結束語
新技術試驗衛星C 星、D 星姿軌控分系統經過在軌測試,姿軌控分系統各項功能正確,性能滿足任務要求。本研究首先實現基于國產操作系統的姿軌控應用軟件設計,基于DLL 的在軌編程功能得到在軌驗證,為小衛星應用軟件并行快速開發積累了寶貴經驗。通過敏捷衛星多種工作模式姿態基準通用設計,實現了任意載荷對目標的凝視跟蹤控制。通過條帶拼接和主動推掃成像控制,擴展了相機的成像范圍,提高了載荷觀測效能。新技術試驗衛星C 星、D 星姿軌控系統成功通過在軌驗證,為我國小型敏捷衛星通用化姿軌控系統研制奠定了良好的技術基礎。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04