翼型風洞試驗技術研究現狀
2022-01-06 09:11:20高永衛魏斌斌
空氣動力學學報 2021年6期
高永衛,魏斌斌,梁 棟
(西北工業大學 航空學院,西安 710072)
0 引言
翼型風洞試驗的研究內容有兩方面。最主要的就是獲得翼型的氣動性能,包括升力系數、阻力系數和力矩系數等。除此之外,一些典型氣動特征的檢測也是現代翼型風洞試驗的研究內容,比如對轉捩位置的檢測等。
翼型風洞試驗的難點也主要存在于兩個方面:首先是洞壁干擾控制和修正,主要解決流場相似的問題和數據的系統誤差的修正;其次是精細的數據分析技術,即在有限的數據中如何獲得更多信息。
風洞試驗是建立在繞模型的流場與繞實物的流場相似的基礎上的,理論上講,流場是否相似取決于單值條件和相似準則的模擬。單值條件方面有幾何條件、物性條件、時間條件和邊界條件。相似準則方面,常用的相似準則是雷諾數和馬赫數。另外,在精細的試驗中,來流湍流度和溫度等作為參數也需要重點關注。
本文在資料調研的基礎上,結合翼型、葉柵空氣動力學國家級重點實驗室的研究進展,對翼型風洞、模型、性能測試技術、模型表面流動轉捩探測技術以及翼型試驗中洞壁干擾控制與修正技術的最新進展及存在問題進行總結。
1 翼型風洞
翼型試驗的基本理念是研究無限大展長、等剖面平直機翼(二維模型)的剖面氣動特性。繞模型的流動為二維流動,即流動沒有沿模型展向的分速度。在能源動力的限制下,風洞設計和建造時試驗段的橫截面積是一定的。因此,基于二維流動假設,翼型風洞的特點是試驗段具有大的高寬比,且具有側壁吹/吸邊界層控制裝置,可以進行翼型模型的靜態/動態性能測試。為了降低上下壁面的洞壁干擾,擴大翼型試驗雷諾數范圍,在不增加動力系統負擔的情況下,還發展出了采用可調節變形的、無上下壁干擾的柔壁翼型風洞。
需要注意的是,風洞試驗中,大多數情況下仍不能完全做到雷諾數和馬赫數同時滿足,且翼型試驗的雷諾數往往不夠。目前仍然是以盡量增大風洞尺寸、增壓和降溫來增加風洞試驗雷諾數。翼型試驗主要在二維風洞中開展,現實中也有用三維風洞開展翼型研究的情形。典型的翼型風洞有如下幾座。
美國NASA的N215低速風洞,試驗段尺寸為2.1 m×3.0 m,可進行大弦長的翼型靜態和動態試驗。NASA蘭利研究中心的0.3 m跨聲速低溫風洞(0.3MTCT)[1],馬赫數范圍為0.1~0.9,試驗段尺寸為0.3 m×0.3 m,模擬溫度范圍在100 ~300 K,模擬雷諾數可達3×108/m,該風洞的特點是具有自適應洞壁,可進行翼型的測壓、測力和流場顯示等多種試驗。
俄羅斯TsAGI的T-124低速風洞[2],試驗段尺寸為1 m×1 m,試驗雷諾數可達6.9×106/m,該風洞為低噪聲低湍流度風洞,可用于翼型的流動轉捩、湍流發展等研究,可采用表面測壓和光學測量等研究方法。TsAGI的T-128跨聲速風洞[3]:試驗段尺寸為2.75 m×2.75 m,試驗馬赫數范圍為0.15~1.7,模擬雷諾數可達4×107/m,可進行大弦長翼型模型的試驗,該風洞為變密度風洞,試驗段具有4面可調節的通氣壁,可同時進行多種試驗測量方法,可進行跨聲速下的抖振研究和高雷諾數下的轉捩研究。
法國ONERA的S3MA風洞[4],試驗段最大尺寸為0.8 m×0.76 m,可模擬的馬赫數范圍為0.1~6.05,最大試驗雷諾數可達5.4×107/m,具有柔性壁面可進行馬赫數的調節,可進行翼型的測力、測壓試驗,也可以采用紋影和紅外等技術進行流場顯示。
日本JAXA的FWT跨聲速風洞[5-6],試驗段尺寸為0.6 m×0.6 m,可模擬的馬赫數范圍為0.5~1.2,該風洞專門進行襟翼氣動性能研究,可進行靜態和動態的壓力測量以及流動可視化研究。JAXA的TWT2高雷諾數跨聲速風洞[7],試驗段尺寸為0.8 m×0.45 m,可模擬的馬赫數范圍為0.2~1.4,最大雷諾數可達1.8×108/m,該風洞可進行翼型的測力、測壓試驗以及流動轉捩等基礎研究。
西北工業大學的NF-3低速風洞,二元試驗段尺寸為3 m×1.6 m,最大風速可達130 m/s,試驗最大雷諾數可達7×106/m,可進行翼型靜態與動態試驗,可進行翼型的測壓和直接測力試驗。西北工業大學的NF-6跨聲速風洞,二元試驗段尺寸為0.4 m×0. 8 m,可模擬的馬赫數范圍為0.25~1.2,翼型試驗的最大雷諾數為1.1×108/m,具有固定馬赫數、變雷諾數的試驗能力,由于采用軸流壓縮機為風洞動力,結合現代控制技術,使風洞馬赫數控制精度達到0.001,為提高數據精度奠定了良好基礎,可進行翼型的測壓和流動轉捩等流動機理的基礎研究。
2 翼型風洞試驗的分類與相關測試技術
按照模型是否運動和傳感器的不同,翼型風洞試驗主要可分為靜/動態測壓試驗和靜/動態測力試驗。
2.1 測壓試驗
測壓試驗是指采用壓力傳感器采集模型表面壓力的試驗。對于靜態試驗,往往在模型上布置靜態測壓孔,使用壓力掃描閥對模型表面壓力進行測量;對于動態試驗,將脈動壓力傳感器埋設在模型表面對模型表面的非定常壓力信號進行采集。
2.1.1 靜態測壓試驗
靜態試驗指吹風過程中,采集數據時,模型是靜止的,得到的數據是定常結果或時間平均的結果。
在測壓試驗中,在翼型模型中剖面布置一定數量的測壓孔(也有多個剖面的情形),用以進行壓力分布的測量。對測得的壓力分布在升力方向積分可以得到翼型的升力系數和俯仰力矩系數。壓差阻力可由壓力分布在阻力方向的積分獲得。翼型型阻(包括壓差阻力和摩擦阻力)的測量采用動量法,在翼型后緣一定位置處布置尾耙進行測量。尾跡積分方法的改進與移動尾耙的設計是型阻測量的研究熱點。
實際的測試中,尾跡的起點和終點往往不易判斷,影響了數據處理的效率和阻力結果精準性。魏斌斌等[8]發明了一種尾跡積分區域的自動檢測方法,可實現對阻力積分區域的自動檢測,可以提高數據處理的自動化程度和積分結果可靠性。
采用移動式尾耙也是提高翼型型阻測量水平的有效方法。使用動量法進行尾跡測量時,傳統上使用固定尾耙,固定尾耙的總壓孔間距是一定的,限制了阻力測量的精度,尤其是對層流翼型試驗而言。在一定的總壓孔間距下,層流翼型小迎角情況下的尾跡區很小,只有少量總壓管處在尾跡區內,能夠測量尾跡總壓損失的點數有限,制約了阻力測量精度的提高。區別于固定式尾耙,移動式尾耙采用少量總壓管,通過游測的方式來測量尾跡區內的動量損失,提高了阻力測量精度。西北工業大學NF-3風洞,通過引進三維移動測量機構設計了新型移動尾耙,提高了阻力測量精度。NF-3風洞新型尾跡測量耙選用風速管排管,一只風速管可一次性測得尾跡區的總、靜壓數值。考慮風洞試驗段尺寸、三維移動測量機構的技術參數和已有翼型模型尾跡的測量結果,確定NF-3風洞的移動尾跡測量耙采用11根風速管,風速管間隔為40 mm,總長為450 mm。分別利用移動尾靶與固定尾耙的測量值獲得的積分區域對比如圖1所示。移動尾耙的優勢在于測量小迎角時翼型的阻力,此時尾跡區內的流動方向與軸向偏差較小,避免了風速管對流動方向較敏感的問題。

圖1 移動尾耙與固定尾耙測量的尾跡區對比Fig. 1 Comparison of the wake regions measured by the mobile wake rake and the fixed wake rake
2.1.2 靜態試驗中的轉捩位置測量
翼型表面的流動受風洞來流湍流度、噪聲水平、溫度、振動水平以及模型表面光潔度等多個因素的影響。轉捩位置的測量是高性能翼型試驗的常選項目。在轉捩過程中,壁面摩擦應力、溫度、壓力脈動等均會出現急劇變化。根據轉捩過程中表現出來的不同特征,發展了不同的試驗技術來探測邊界層轉捩。
在翼型靜態邊界層轉捩探測試驗中,常用的試驗方法有熱線風速儀法、溫敏涂料法、熱膜技術、升華法、紅外技術和脈動壓力測量技術等。早在20世紀70年代,Knapp等[9]和Lagraff[10]就利用熱線方法研究了亞聲速和高超聲速邊界層轉捩。溫敏涂料法是一種非侵入式的測量模型表面溫度的光學技術,Costantini等[11]使用溫敏涂料研究了非絕熱表面對轉捩的影響,Fey等[12]使用溫敏漆在低溫風洞中對高雷諾數下的轉捩進行了探測。熱膜技術是通過測量熱膜傳感器的傳熱變化或電壓輸出水平來識別邊界層的狀態,Hodson[13]和Zhang[14]通過熱膜輸出電壓與壁面剪應力的關系,進一步定義了準壁面剪應力。升華法針對不同的流動條件需要合理的選擇溶劑和指示劑,要盡量減小噴涂后指示劑的粗糙度對翼型自然轉捩的影響。盡管該方法比較傳統,但由于使用方便,目前仍被經常使用。紅外技術則利用紅外相機對模型表面溫度信息進行捕捉,經過圖像處理,可以觀察到清晰的表面流動現象,該技術對模型表面溫度處理技術要求較高,多用于跨/超聲速試驗中。
與上述試驗技術相比,使用脈動壓力傳感器對邊界層轉捩進行檢測更加方便實用。在使用脈動壓力傳感器進行轉捩探測時,將脈動壓力傳感器布置在待測模型表面,然后使用數據采集設備對傳感器感受到的瞬態壓力進行實時采集,最后對采集到的數據進行處理并分析,獲得轉捩特征。在安裝脈動壓力傳感器時,需保證傳感器探頭與模型表面平齊;另外,由于轉捩的特征頻率較高(一般在幾千Hz以上),因此配套的數據采集設備的采集頻率也必須較高。
早在20世紀70年代,Heller[15]就利用聲學技術探測到了高超聲速再入飛行器上的流動轉捩。Lewis和Banner[16]使用脈動壓力測量技術研究了X-15垂尾的邊界層轉捩。作者團隊在使用脈動壓力進行轉捩探測方面也開展了大量的研究工作[17-18],主要工作集中在轉捩特征的表征及數據處理方法上。另外,如果僅需要粗略判斷轉捩位置,不研究轉捩過程中的其他問題,也有研究者使用翼型表面的壓力分布來直接進行轉捩判斷[19-21],如圖2所示。

圖2 轉捩探測的壓力分布方法展示圖[19]Fig. 2 Illustration of the pressure distribution method in transition detection[19]
2.1.3 動態測壓試驗
動態試驗指風洞試驗過程中,數據采集時,模型按一定規律運動,得到的數據為模型受力的瞬態值。
通常,翼型模型運動(俯仰、沉浮、俯仰-沉浮耦合等)時的氣動性能與靜態的有較大差異。在風洞試驗時,必須結合具有高時間精度的壓力傳感器和數據采集設備。
應用于動態試驗的壓力傳感器直徑較靜態試驗測壓孔大,比如Kulite XCQ-093系列的差壓式壓力傳感器,其直徑為2 mm,如圖3(a)所示。因此,動態試驗過程中,傳感器數量一般比靜態試驗中的數量少,如圖3(b)所示。

圖3 動態試驗傳感器及其布置Fig. 3 Dynamic experiment sensor and its installation layout
在獲得翼型表面瞬態壓力分布之后,通過積分可獲得翼型瞬時的升力系數、壓差阻力系數和俯仰力矩系數。特別指出,在動態試驗中,由于流場是非定常的,因此,靜態試驗中使用尾耙進行阻力測試的方法是不適用的,一般使用翼型壓力分布積分獲得的壓差阻力代替翼型的阻力。近年來,翼型動態測壓試驗的研究集中在數據處理方法的改進。
在進行壓力分布積分計算時,為了獲得光滑平順的氣動性能曲線,需進行數據處理。高永衛等發展了“相位平均法”(Phase Average,PA)[22],魏斌斌等[23]在此基礎上發展了“滑移窗口技術”(Slip Window Technology,SWT),并進一步發展了“可變滑移窗口技術”(Variable Slip Window Technology,VSWT)[24-25]。
PA方法是處理俯仰翼型數據的常用方法。用具有相同相位的數據計算平均值的變化,準確的統計值需要大量的數據,高永衛等[22]的研究表明,至少需300個振動周期的數據才能獲得穩定的氣動性能。那么保持振蕩系統的嚴格周期性對PA具有重要意義。然而,由于機械部分與電機驅動系統之間的間隙誤差,在不同的振動周期內所獲得的數據點并不完全相同,因此,根據采集點或時間對每個周期的數據進行統計變得相當復雜。此外,由于慣性的影響,當翼型俯仰到最大振幅時,迎角會有輕微的波動,測得的迎角是不規律的。為了得到可靠的統計值,高永衛等[22]提出了一種擬合PA方法,具體過程為首先采集多個振蕩周期的表面脈動壓力數據,然后對所需相位下的數據進行內插,獲得各個振蕩周期下該相位的脈動壓力值,然后對該相位的壓力數據進行平均得到均值,進一步獲得該相位下的脈動壓力均方根值,使用均值可用來表征壓力分布,使用均方根值可用來表征轉捩特征。
PA方法所需的振蕩周期數量非常大,為了解決這個不足,魏斌斌等[23]發展了SWT。即,使用一定大小的窗口對整個脈動壓力時間序列進行遍歷,獲得該窗口內的迎角、脈動壓力壓力均值、均方根值等信息,對不同位置處相同迎角對應窗口內的壓力均值進行積分可獲得翼型的氣動性能,而不同窗口內的脈動壓力均方根值序列可用來進行轉捩判斷。這種方法理論上通過一個周期的數據就能得到完整的翼型動態性能。文獻[23]對窗口函數形式和窗口寬度進行研究,最終確定了實用的SWT,具體實施過程可參考文獻[23]。SWT解決了相位平均法采樣時間過長的缺點,理論上,SWT只需要獲得一個振蕩周期的脈動壓力數據就可以捕捉翼型的非定常特性。
然而,SWT仍然存在兩點不足:(1)在一個完整的周期中,由于流動分離和再附著的特征非常強,而轉捩/再層流化特征不夠明顯,給自動準確識別帶來了困難。(2)特征位置處的迎角精度不夠高。為了解決SWT的這兩個缺點,魏斌斌等[24]提出了VSWT,并提出了兩種計算策略:全局策略(Global VSWT,G VSWT)和單點策略(Single Point VSWT,SP VSWT)。VSWT實施過程具體可參考文獻[24-25]。
事實上,SWT和VSWT均是依托于轉捩/再層流化特征檢測為目標發展出來的,尤其是VSWT,其在轉捩/再層流化特征檢測方面體現了明顯的優勢,這部分內容將在2.1.4節進行詳細介紹。如果僅是獲得動態翼型的氣動力或力矩,使用PA和SWT就足夠了。
除了利用傳統的壓力傳感器進行測壓,動態壓敏漆技術已經逐步完善,其測量范圍大,響應快,正在從技術研究走向工業應用。
2.1.4 動態測壓試驗中的轉捩判斷
翼型俯仰振動動態試驗中,伴隨著幾個典型的非定常特征:轉捩/再層流化、流動分離/再附、動態失速等。翼型動態試驗中的轉捩是一個非常重要的特征,其不僅對附著流動的形態產生影響,還會對動態失速產生影響[26]。
Lee等[27-28]利用熱膜傳感器研究了NACA0012翼型在振蕩過程中的轉捩和失速特征。Richter等[29]利用熱膜技術研究了EDI-M109翼型的非定常轉捩特性。Kim等[30]借助熱膜和煙流研究了雷諾數對NACA0012翼型在振蕩過程中非定常邊界層的影響。
如2.1.3節所述,使用脈動壓力方法不僅可以方便地對翼型氣動力/力矩進行計算,還能夠對翼型動態運動時的轉捩/再層流化特征進行檢測[31]。
作者團隊基于脈動壓力對翼型動態運動時的轉捩探測開展了深入研究,并發展了一系列數據處理技術(PA,SWT,VSWT)。這些方法均能較好地將上行程的轉捩和下行程的再次層流化特征檢測出來。其特征為脈動壓力的RMS值相較于附近時間內有峰值,例如圖4(a)中的B點為轉捩,圖4(a)中的A點為層流流動,C點為湍流流動。圖4(b)是SWT計算得到的結果,從中可以清晰地觀察到x/c≤0.52范圍內上行程的轉捩和下行程的再層流化特征。圖4(c)和圖4(d)分別是G VSWT和SP VSWT的計算結果,可見,這兩種策略的VSWT相較于SWT能夠更好地對轉捩/再層流化特征進行捕捉,提高了特征位置處的迎角精度。
2.1.5 動態失速
動態失速是翼型動態試驗中非常重要的非定常特征,其影響了翼型氣動性能的遲滯特性。使用測壓法可以對動態失速進行研究。
在翼型的動態試驗(俯仰運動和沉浮運動)中,由于流動的遲滯效應,在迎角超過靜態失速迎角時,流動仍呈現附著流狀態。迎角較大時,往往伴隨著動態失速渦(Dynamic Stall Vortex,DSV)的發展,DSV帶來顯著的渦升力,使得翼型升力線斜率明顯大于靜態情況。Carr和Chandrasekhara等的許多研究[32-37]對認識動態失速渦及動態失速過程極有幫助,他們正是使用測壓法對動態失速現象進行了研究。
很多學者還使用測壓法對DSV的傳播速度開展了研究。McCroskey[38]使用表面壓力、熱線和皮托管研究了NACA0012翼型的DSV,發現其傳播速度約為(0.35~0.4)U∞。Lorber等[39]同樣使用表面壓力獲得了SSC-A09翼型的DSV傳播速度,為0.16U∞。魏斌斌等[40]也使用表面壓力獲得了DSV近壁面演化速度,約為0.3U∞。
使用測壓法對動態現象及機理開展研究也很普遍。Mukund Acharya等[41]測量了翼型在上行程期間的瞬態壓力,認為翼型表面渦結構的特性與流場發展的相互作用機理有關。Gupta[42]使用脈動壓力傳感器和PIV技術研究了NACA0012翼型在動態失速過程中的非定常流場,文章著重分析了前緣分離泡(Laminar Separation Bubble,LSB)和DSV的發展,研究發現前緣分離泡的中心頻率為50≤St≤110。Geissler等[43]在DLR的ADASYS項目中研究了前緣下垂對超臨界翼型的影響,發現前緣下垂可有效地改善翼型的動態失速特性。隨后,Geissler和Haselmeyer[26]等又繼續研究了流動轉捩對動態失速發生的影響,研究發現,湍流分離區域從后向前的發展和擴散過程對動態失速發生有極其重要的影響。
2.2 靜/動態測力試驗
在翼型測力試驗中,使用數據采集系統對測力天平的輸出信號進行采集,然后通過天平公式將測力天平的輸出電壓轉化為氣動力和力矩。可以說,測力天平是測力試驗中最主要的測試設備。
由于阻力載荷很小,翼型測力試驗通常會有設計載荷不匹配的情況。李勇等[44]設計了獨立測量阻力的翼型天平。楊中艷等[45]研制了翼型的雙支撐測力系統,實現了翼型小阻力與大升力之間的機械解耦,提高了阻力測量精度。
傳統的電阻應變式天平在試驗過程中會存在電磁干擾影響數據精度和可靠性。成壘等[46]提出了一種在時域上對信號進行干擾補償的方法,能顯著減弱電磁干擾的影響。
除了電阻應變式天平,光纖應變式天平也因其抗電磁干擾、耐高溫、靈敏度高等優點受到廣泛研究。美國和歐洲在亞跨聲速風洞中開展了光纖天平的應用研究,Pieterse[47-48]應用“兩槽式光纖桿式天平”的概念,設計研究了六分量和四分量的光纖天平。國內沈陽航空航天大學、中國空氣動力研究與發展中心和電子科技大學都對光纖應變天平開展了相關應用研究[49-52]。
風洞天平的另一個重要部分是天平的校準,2020版《Calibration and Use of Internal Strain Gage Balances with Application to Wind Tunnel Testing》[53]吸收了全球多個有影響力的航空航天風洞試驗單位參與,總結了天平校準技術的最新成果,對國內風洞天平校準的研究具有很重要的參考價值。Landman[54]利用試驗設計的方法對風洞天平進行溫度校準,減少了50%的工作時間,同時減小了殘差。Kammeyer[55]利用逐步回歸分析方法對天平進行校準,結果比以往的全局回歸分析更準確,皮重載荷收斂性更好。除了傳統的基于多項式模型的校準方法,人工神經網絡技術在天平校準上顯現出智能化、簡便化以及抗干擾能力強、容錯能力強的優勢,Meade[56]使用基于高斯徑向基函數的神經網絡建立天平校準模型,結果與傳統方法吻合度很高。
天平技術涉及材料、傳感、信號處理、光電和數學等多學科的內容,這些科學領域的進步都會對天平技術的發展產生重要影響。加強天平技術的理論研究是非常重要的[57]。
翼型測力試驗中模型的設計至關重要。翼型的直接測力試驗主要采用三段翼方法。焦予秦等[58]針對其中的模型中段與外段傳力問題及縫道流動問題進行初步研究,提出了膠帶密封和軟材料填充兩種方法,得到的氣動力與測壓法得到的結果在小迎角范圍吻合良好。焦予秦等[59]對風力機翼型開展了極大迎角條件下的測力試驗,得到的氣動力與測壓試驗結果一致,說明了直接測力技術同樣適用于翼型大迎角試驗。郭輝等[60]對于大厚度翼型的進一步研究發現,三段翼方法的測量結果與表面測壓得到的結果仍有明顯差別,狹縫的影響是全局性的,針對不同的試驗條件,狹縫處理方法還需進一步發展。對于翼型過失速試驗,Emmerson B[61]對E387翼型進行了直接測力、表面測壓和尾跡測量三種方法對比試驗,結果表明直接測力和尾跡測量相比于表面測壓得到的結果與公布的數據更為符合。
3 洞壁干擾控制與數據修正技術
翼型風洞試驗存在兩類最主要的干擾效應:上下壁干擾和側壁干擾,所以風洞試驗數據一般都需要進行洞壁干擾修正[62]。側壁干擾是一個有黏的、三維流動問題[63-65],上下壁干擾則是一個無黏的、二維流動問題。減弱側壁干擾的有效方式是對其進行流動控制,而減弱上下壁干擾的有效方式則是進行上下壁干擾修正。
目前,在低速風洞中,模型的尺度效應、增壓情況下湍流度效應等的影響規律還沒有完全研究清楚。在跨聲速風洞中,透氣壁噪聲控制及對數據精度影響規律、激波影響與消除方面仍在繼續探索中。
3.1 側壁干擾
在翼型風洞試驗中,為了達到實際飛行的雷諾數條件,一般會使用弦長較大的試驗模型。而風洞尺寸是固定的,這就意味著,大弦長勢必會帶來展弦比的減小,這時,側壁干擾效應會顯著影響翼型氣動特性。
側壁影響中最主要的是翼型模型與側壁相交處的邊界層分離。當翼型迎角較大時,沿翼型表面弦向的逆壓梯度增加。這個逆壓梯度同樣作用在與模型相交處的側壁邊界層上,此處的邊界層實際上是側壁邊界層與翼型表面邊界層混合而成的。一般說來,側壁邊界層比翼型表面邊界層厚得多,所以此時雖然模型中間剖面尚未分離,但是逆壓梯度迫使翼型模型靠近側壁的位置首先分離,這一分離區以45°角(極限情況)向模型中間擴展。對于展弦比小于2的翼型模型而言,從側壁處開始的分離可能擴展到翼展中間剖面,對于展弦比較大的翼型,靠近側壁的流動分離。對于翼展中間剖面上的流動也會產生很大的影響。側壁邊界層在黏性和逆壓梯度作用下發生分離,會在模型與側壁之間的角區形成復雜的橫向流動,這種流動具有三維特征[66-68]。這種橫向流動由側壁角區向翼型中線(風洞軸線)逐漸發展,理論上,如果流場品質高、均勻性好,翼型中線的橫向流速應該為零。這種三維效應會導致翼型中線的升力減小[69-70]。Sudani等[65]的研究表明,為了減小側壁干擾效應,低馬赫數情況下,翼型模型的展弦比至少應達到1.5;高馬赫數情況下,則至少達到2.0。牛嵩等[71]對不同馬赫數和迎角下獲得足夠高品質的二維流動所需要的最小展弦比進行了數值模擬研究,結果表明,隨著馬赫數和迎角的增加,所需的最小展弦比有所增加,而當出現激波后,則需要更大的展弦比。
3.1.1 側壁干擾控制
為了減弱側壁-模型角區分離流動帶來的三維效應,需使用邊界層控制(Boundary-layer Control,BLC)技術對側壁流動進行控制。吹氣[69]和吸氣[64,72]是最常用的側壁邊界層控制方法。吹氣為風洞側壁邊界層提供能量,使其能夠抵抗模型的逆壓梯度引起的流動分離。吸氣減小了側壁邊界層厚度,同樣可以提高抵抗角區流動分離的能力。NASA低湍流度壓力風洞(NASA Langley Low-Turbulence Pressure Tunnel,LTPT)使用這兩種方法均實現了對角區分離流動的有效控制[68]。日本國家航空航天實驗室(National Aerospace Laboratory in Japan,NAL)[65,73-74]使用邊界層抽吸技術實現了模型區附近自由來流的均勻性。Nishino[69]使用計算方法研究了在Coanda射流吹氣條件下風洞側壁干擾效應,研究表明,風洞側壁對尾緣Coanda射流速度剖面的影響很小,在流動分離之前,在中間剖面附近相當大的區域內,流動是準二維的。在Coanda射流面與側壁之間,流動分離會在側壁卷起兩個流向渦,這些流向渦的夾帶和卷起使得翼型模型中剖面產生的升力和阻力比二維情況下小。西北工業大學在NF-3風洞中[75-77]對側壁干擾效應進行了研究,通過吹氣方式實現了對側壁干擾效應的有效控制。
總體來看,目前國內外普遍采用了下列幾種方法,均能取得較好的效果[78]。
1)在翼型上游離模型不遠處通過微孔壁或狹縫進行側壁邊界層吸除。經驗數據表明,抽氣量為試驗段空氣流量的1%~2%時效果較好,>2%時效果增加極少。
2)在鏈接模型的端板上開很多微孔或采用細金屬絲壓緊后形成透氣網板,通過端板進行邊界層吹除,其效果比前方吸除的方法強。應注意的是,抽氣壓力應該小于翼型表面的最小壓力,否則其效果還不如不抽氣。
3)在翼型前緣附近的側壁邊界層內進行切向吹氣,增加側壁邊界層內的氣流動量,從而防止分離。吹氣量系數及吹氣位置應小心控制,一般情況下存在一個臨界吹氣量,當吹氣量略大于此臨界量時,效果較好,并且模型中間剖面繞流基本不隨吹氣量變化,這個臨界吹氣量可通過試驗來確定。
一般來說,抽吸邊界層方法對模型流場的擾動比吹除法小一些,均勻一些,因此更多的風洞采用抽吸法。以上控制方式均屬于主動流動控制,事實上,在航空領域,被動式控制方式也有很多。尤其是被動式渦流發生器(Vortex Generators,VG),因其結構簡單、成本低廉、控制效果顯著,而被廣泛應用于對邊界層的控制。
VG可在主流中誘導出流向渦,使邊界層重新賦能并變薄,抑制流動分離的能力增強。魏斌斌等[19]提出了一種基于VG的大厚度翼型側壁干擾控制方法,如圖5所示,研究表明這種方式能夠對側壁干擾進行有效控制。考慮到被動式VG的便捷性、實用性和有效性,這種側壁干擾控制方法是一種成本更低的方法。
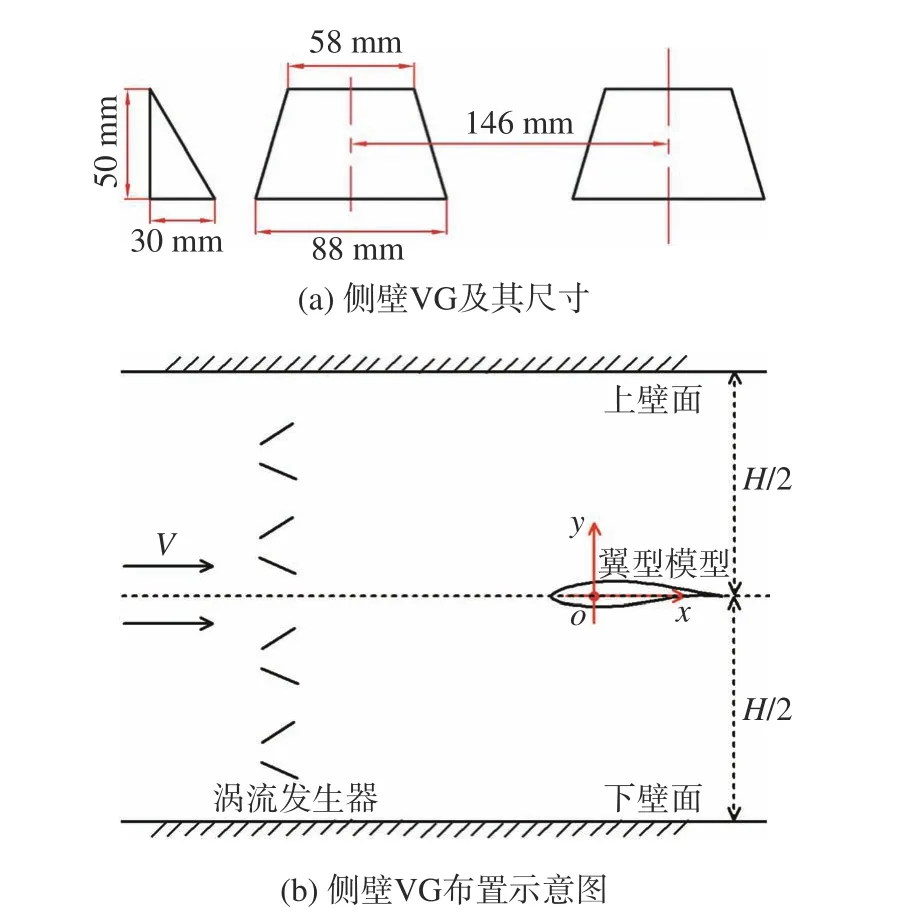
圖5 側壁VG布置形式[19]Fig. 5 VG layout on the side wall[19]
3.1.2 側壁干擾修正
Barnwell[79]在20世紀70年代末建立了側壁干擾的修正準則,基于相似律提出了亞聲速的側壁干擾修正方法。隨后Sewall[80]在亞聲速狀態引入了Prandtl-Glauret定律,并引入改進的Von Karman定律將該方法推廣到了跨聲速狀態,稱為B-S方法。后來,Murthy[81]從試驗段內有效流通面積出發,提出了一種新的修正方法,對亞聲速和跨聲速情況做了不同處理,分析了展弦比對側壁干擾修正的影響,提出了與展弦比相關的修正方法。程克明[82]發展了一種當地修正法,涉及三元扭曲效應、二元堵塞效應和局部升力效應的修正,能夠處理主要的側壁干擾效應。Sudani等[73-74]研究了二維跨聲速風洞側壁干擾的影響,使用Sawada上下壁干擾修正方法、B-S修正方法和Murthy側壁干擾修正方法進行四壁干擾修正,得到與數值計算一致的結果,同時發現,影響修正效果的是試驗段高度與翼型弦長的比值,而不是展弦比,并建議計算壓力系數時,應考慮與馬赫數修正相關的動態壓力和靜態壓力。Boping等[83]基于梯度優化方法,提出了一種受壁面干擾的馬赫數和迎角修正方法,并與升力干擾修正法和B-S修正法進行了比較,結果表明該方法與試驗數據吻合,而且能準確地把握住激波的位置,壓力分布吻合度更高。Belligoli等[84]基于數據同化的想法,提出了一個用于風洞洞壁干擾修正的變分數據同化框架,通過優化調整自由流迎角和馬赫數以及湍流模型的修正場,將試驗測量值與雷諾平均模擬值之間的差異降到最低。
3.2 上下壁干擾
翼型試驗上下壁干擾的性質和嚴重程度會隨馬赫數變化。在亞聲速來流中,主要表現為堵塞干擾和升力干擾。在跨、超聲速來流中,主要表現為激波在洞壁上形成的反射波打到模型上所產生的影響。
阻塞干擾是指與自由空氣相比,閉口式風洞洞壁的存在相當于減小了流過翼型的流動通道面積,從而造成翼型與洞壁間的流速增大,這一流速大小的變化沿風洞軸線方向一般不同,引起風洞軸向的靜壓差,產生水平浮力。阻塞干擾可以分為模型的實體阻塞干擾和尾流阻塞干擾。對于開口式風洞,為滿足壓力平衡的條件,流線繞過翼型時會向外擴張,相當于增大了流動通道面積,產生與閉口式風洞相反的阻塞影響。
升力干擾是指在閉口風洞中洞壁對繞翼型的流線產生干擾,與自由空氣中的流線相比會產生附加的彎曲,翼型前緣駐點會向下表面移動,相當于增大了翼型的有效迎角,從而導致升力的變化。通常對于亞聲速有正迎角的翼型試驗,翼型上表面與洞壁之間形成擴張管道導致氣流減速,翼型下表面與洞壁形成收縮管道導致氣流加速,整個流場都會受到這種速度梯度的影響。
跨、超聲速翼型試驗隨著馬赫數的提高,壓縮性增強,洞壁的影響會隨之增大,模型的阻塞度需要隨之降低。
3.2.1 上下壁干擾控制
解決上下壁干擾主要有兩種控制方法,一是通氣壁技術,二是自適應洞壁技術。前者屬于被動控制設計,后者屬于主動控制設計[85]。通氣壁主要有開孔式和開槽式兩種。自適應洞壁有通氣自適應洞壁和柔性流線型洞壁之分。通氣壁和自適應洞壁的目的都是通過改變洞壁邊界處的流動來降低洞壁的影響,盡量模擬無邊界的流動條件。
對于亞聲速風洞,洞壁的形式主要有射流壁、縱向開槽壁和柔性壁三種。低速開口試驗段風洞的試驗段邊界是自由射流邊界,相當于一種射流壁,會增大氣流通道面積,其洞壁干擾的影響與閉口式實壁相反,但其絕對值要小于實壁的情況。在通氣壁技術中,縱向開槽壁對于減小亞聲速洞壁干擾的效果最佳。縱向開槽壁的最佳開閉比與槽數、模型的大小和迎角有關,通常采用的開閉比在5%~14%[86]。
對于跨、超聲速風洞,洞壁的主要形式有開孔壁、開槽壁、通氣自適應洞壁和柔性流線型洞壁。開孔壁消除激波和膨脹波反射的能力比較突出。目前開孔壁有固定開閉比直孔壁、固定開閉比斜孔壁、可變開閉比的開孔壁和可分段局部調節通氣特性的開孔壁。對于開孔壁特性的研究,美國波音公司[87]、歐洲ETW[88]、俄羅斯TsAGI[89]等試驗機構都開展了數值模擬研究,國內西北工業大學NF-6風洞[90-91]、南京航空航天大學[92-93]和中國空氣動力研究與發展中心[94-97]也進行了類似的研究工作。縱向開槽壁對于減小亞聲速的洞壁干擾的能力要優于開孔壁,但消除激波和膨脹波的反射波的能力則不如開孔壁。縱向開槽壁產生的氣動噪聲遠小于開孔壁,適用于邊界層轉捩的研究。美國ARC UPT風洞、NTF風洞和歐洲ETW風洞等都采用了開槽壁的技術。開槽壁與開孔壁類似需要進行最佳開閉比以及其干擾特性的研究,國內空氣動力研究與發展中心和西北工業大學等開展了開槽特性的大量研究[98-102]。
通氣自適應洞壁采用的是分格駐室及變開孔率孔壁,需要配備試驗設備檢測壁面附近的兩個速度分量,通過調節開孔率和駐室的抽吸氣的量來達到盡量減小洞壁干擾的目的。
流線型洞壁的概念起源于英國國家物理實驗室(National Physical Laboratory,NPL),第一個自適應試驗段建于1938年[103]。到了20世紀60年代中期至70年代,對高質量試驗數據的需求使得人們將注意力放到了自適應洞壁的研究上。最常用的洞壁自適應策略是由Wolf和Goodyer[104]發展的。Meyer和Nische[105]開發了一種混合技術,稱為“自適應槽”,這種方法是將自適應洞壁和通氣壁試驗段技術結合,相比于自適應洞壁,減少了機械復雜性。Weiand等[106]對NACA0010翼型在DNW-TWG跨聲速風洞的試驗進行了數值模擬,建立了一種數值上與試驗相同的自適應洞壁方法,與試驗結果對比吻合良好。國內西北工業大學的自適應風洞已經成功進行了大量的試驗研究[107-113],中國空氣動力研究與發展中心[114-117]也進行了柔壁風洞的研究制造并投入了使用。
3.2.2 上下壁干擾修正
3.2.2.1 靜態試驗中的上下壁干擾修正
對翼型靜態氣動性能進行上下壁干擾修正,常用的方法有試驗修正法、經典映像法[118]、Maskell法[119]、有限基本解法(即渦格法)[120]和壁壓信息法[121-122]。壁壓信息法結合了數值計算和試驗結果,是一種應用廣泛且極具發展潛力的洞壁干擾修正方法。下面主要介紹壁壓信息法方面的相關進展。
20世紀70年代中后期,壁壓信息法逐漸被用于洞壁干擾修正中。該方法測量了風洞洞壁的靜壓參數,該參數中同時包含模型的擾動信息和洞壁干擾信息,將洞壁干擾信息分離出來即可得到洞壁干擾的修正量。這就解決了傳統洞壁干擾方法在研究復雜流動問題時的局限性。
從對壁壓測點的分布要求劃分,可分為面壁壓信息法和點壁壓信息法。如英國Ashin[123-124]和荷蘭Labrujere[125]研究的屬于典型的面壁壓信息法,進行修正時,需要知道整個洞壁表面的靜壓分布,以此作為邊界條件,對模型及尾流進行求解,最后得到洞壁干擾速度。因此需要在整個洞壁壁面上布置壁壓測點,所需測點繁多,而且修正程序復雜,計算效率低。Hackett等[126]的研究屬于典型的點壁壓信息法,用等效基本解來模擬試驗模型和試驗尾流,如對于大迎角、大阻塞度的試驗,一般只需在風洞上下洞壁的中心線上布置十多個測點即可,所需測點少,操作簡單,修正程序很實用。但是該方法有一個限制條件,要求必須測得試驗模型下游處的洞壁壓力系數的漸近值,該方法才可以對試驗數據進行準確修正,否則修正結果一般會過量。而且測壓與測力試驗修正方法不一樣,使得修正結果不夠準確。江桂清[127-129]同樣采用點壁壓信息法,利用動量定理推導出遠下游的壁壓系數分布漸近值與阻力系數的關系,消除了Hackett方法中必須要在模型下游測的壁壓的漸近分布才能進行準確修正的苛刻條件,同時考慮了洞壁阻塞干擾軸向遷移加速度效應,使得測壓與測力試驗的修正方法一致,修正結果也更為可信。與面壁壓信息法相比,點壁壓信息法測點少,操作方便,修正程序相對簡單,應用更廣。
從計算方法來劃分,可分為迭代法、矩陣法、積分法、影響函數法等。如Hackett[130-131]在早期使用的是迭代法進行壁壓信息法洞壁干擾修正,該方法物理概念清晰,在滿足修正條件的情況下修正結果較為準確,但需解非線性方程組,計算量大,費機時,有時迭代會不收斂,而且不能進行洞壁的升力干擾修正。美國Moses等[132]采用的計算方法也屬于迭代法,事先給定了收斂條件,比Hackett的修正結果更加準確,且可以進行洞壁的升力干擾修正,但是計算量仍然較大。國內陳明巖[133]利用迭代法對南航NH-2風洞內的大迎角、大阻塞度模型進行了洞壁干擾修正,修正結果比較準確,但是計算量仍較大。后來美國Mokry等[134]采用傅里葉變換的方法計算洞壁干擾,該方法相對于迭代法計算量稍小一些,但仍然比較費機時。為了解決計算量大的難題,周長海[135]、袁建昆等[136]提出了壁壓信息積分法,把流場中任一點的速度表示成包含渦的簡單函數的積分,將所測得的壁壓與每個測點的積分表達式聯系起來,即可求得流場中任一點的洞壁干擾速度,該方法計算量小,簡單省時,而且修正結果比較準確。張文華[137]基于洞壁壓力使用影響函數對洞壁干擾進行計算,這種方法的優點是測壓點少,并考慮了三元模型尺寸、外形以及角區的影響。而Hackett[121]在后期提出了壁壓信息矩陣法,把非線性方程組的問題轉化為線性問題,簡化了計算,使計算程序更為靈活方便,適用性強,在所有計算方法中應用最為廣泛,如江桂清[138]、張維智等[139]所采用的均是壁壓信息矩陣法。
3.2.2.2 動態試驗中的上下壁干擾修正
在翼型動態試驗洞壁干擾修正方面,最開始的研究是基于線性理論進行的。
從20世紀開始,就有很多學者對薄翼型的非定常氣動載荷的預測問題進行了研究。對于俯仰振蕩翼型,主要貢獻者是Theodorsen[140]和Possio[141]。Theodorsen在不可壓流動中推導出一個作用在振動平面上的力和力矩的顯式表達式,并表示為Bessel函數。Possio在亞聲速可壓縮流動中得到了一個將下洗和壓力分布聯系起來的積分方程,該積分方程需通過數值方法進行求解。然而,這兩種方法只在無限遠場條件下適用,即無洞壁情況。Bland[142]是第一個在亞聲速可壓縮流情況下考慮洞壁影響的,得到了一個關于洞壁無量綱高度的積分核函數,并使用積分裝配法對其進行了數值求解。后來,Fromme和Golberg[143]在Bland工作基礎上,通過改進積分方程的核函數進一步發展了動態薄翼的洞壁干擾線性理論。
然而這些理論均是建立在小擾動假設下的,對大迎角、大擾動情況不適用。Geissler[43]在2005年對比了靜態試驗和動態試驗中壁壓信息的區別,研究表明,平均迎角α0= 10°情況下,在平均迎角位置,靜態試驗和動態試驗的洞壁壓力分布基本一致;而在較大的平均迎角情況下(α0= 15°),靜態和動態的洞壁壓力形態有顯著差異,原因在于,靜態情況下,該迎角處流動已經發生分離,而動態情況,由于流動的遲滯效應,流動仍然處于附著流狀態。Soltani等[144]使用壁面的壓力分布研究了洞壁干擾對沉浮振蕩翼型的影響,在大迎角情況下,壁面附近渦流等因素是主導流場的關鍵因素,隨著迎角或縮減頻率的增大,洞壁干擾愈加復雜,使得洞壁干擾修正更為困難,研究結果顯示,模型底部的洞壁測壓點受模型振蕩的影響嚴重,其壓力脈動呈現正弦變化規律。Beyers[145]分析了旋轉天平試驗的洞壁干擾源,認為橫向聲干擾和渦尾跡-洞壁干擾是主要的干擾源,對于二維流動,大迎角動態失速階段的渦尾跡-洞壁干擾尤為嚴重。
國內,丁克文等[146-147]使用兩個不同尺度的三角翼模型對俯仰振蕩過程中的非定常洞壁干擾進行了研究,得到了初步結論。李國強等[148]使用風洞試驗結合CFD方法對翼型動態試驗中的洞壁干擾進行了研究,揭示了翼型動態試驗洞壁干擾的產生機制和影響規律。焦予秦等[149]使用三個不同尺度的NACA0012模型對非定常洞壁干擾進行了研究,使用單風洞多模型外推法對試驗數據進行了修正,對翼型動態試驗洞壁干擾修正進行了探索。魏斌斌等[150]從能量的角度出發,提出了一種基于本征正交分解(Proper Orthogonal Decomposition,POD)的動態翼型洞壁干擾修正方法,修正結果合理可信。
可見,翼型動態試驗存在顯著的洞壁干擾問題。上述這些研究均未給出具體的修正方法或公式,實際操作性不強,需對翼型動態流場及動態失速的演化過程開展進一步研究。
4 結 論
本文在資料調研的基礎上,結合翼型、葉柵空氣動力學國家級重點實驗室的研究進展,對翼型風洞、模型、性能測試技術、模型表面流動轉捩探測技術以及翼型試驗中洞壁干擾控制與修正技術的研究進展及存在問題進行了總結與分析。主要結論如下:
1)翼型專用風洞試驗段、按二維理念的翼型試驗模型設計及側壁干擾的控制等仍是保證高質量翼型性能試驗數據獲取的重要條件。
2)在翼型風洞試驗結果處理與分析中,現代數字信號處理技術可為轉捩探測、動態失速機理研究、洞壁干擾修正等方面的工作提供有力工具,對提高數據的利用率及試驗結果的高可信度起到積極作用,值得進一步發展。
3)洞壁干擾的控制與修正仍是影響翼型試驗結果的重要方面,特別是側壁干擾控制在翼型大迎角試驗、動態試驗中仍是必須慎重對待的因素,相應的技術仍需不斷發展。動態試驗中的上下壁干擾修正技術仍是目前研究的熱點。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
光學精密工程(2016年6期)2016-11-07 09:07:19