無人機(jī)智能氣囊設(shè)計(jì)
2022-01-07 06:59:14李沁程張熙蘇子欽許浩
新型工業(yè)化 2021年9期
李沁程,張熙,蘇子欽,許浩
(中國民用航空飛行學(xué)院 航空工程學(xué)院,四川 廣漢 618307)
0 引言
隨著無人機(jī)技術(shù)的快速發(fā)展,無人機(jī)已廣泛運(yùn)用于生活的各種場(chǎng)合,然而通過對(duì)無人機(jī)的調(diào)查研究后[1]發(fā)現(xiàn)無人機(jī)在地形復(fù)雜的區(qū)域飛行或者水面飛行時(shí),由于無法準(zhǔn)確知悉無人機(jī)的飛行狀況再加之復(fù)雜的環(huán)境經(jīng)常會(huì)導(dǎo)致無人機(jī)的墜毀。在無人機(jī)墜毀之后人們很難找到機(jī)體殘骸,難以實(shí)現(xiàn)回收利用。因?yàn)樵谀吧念I(lǐng)域僅憑借無人機(jī)最終墜毀的地理信息去尋找十分不便利,尤其當(dāng)無人機(jī)掉落到水里,尋找將變得更為困難。經(jīng)調(diào)查,低空無人機(jī)是目前市面上較常用的無人機(jī)種類,故選用低空無人機(jī)作為智能氣囊系統(tǒng)的試驗(yàn)機(jī)。低空無人機(jī)的正常巡航高度在100m~1000m之間,無人機(jī)的最低安全飛行高度為1.2m,低于1.2m時(shí)無人機(jī)將自動(dòng)由巡航模式轉(zhuǎn)變?yōu)榻德淠J健_@使得無人機(jī)在近水面飛行時(shí)極易轉(zhuǎn)變?yōu)榻德淠J匠寥胨住K员卷?xiàng)目計(jì)劃設(shè)計(jì)出一款適合無人機(jī)使用的救生氣囊及報(bào)警通信系統(tǒng),在發(fā)生意外情況時(shí)能及時(shí)反饋給操作者信號(hào),以便于在無人機(jī)發(fā)生墜毀前能夠及時(shí)彈出氣囊,若無人機(jī)沉入水底也可利用救生氣囊使無人機(jī)浮出水面,同時(shí)反饋聲光報(bào)警,配合反光材料的使用使無人機(jī)更容易被發(fā)現(xiàn),降低搜尋難度。
無人機(jī)的救生氣囊設(shè)計(jì)由內(nèi)部的控制芯片作為核心,采用傳感器對(duì)無人機(jī)飛行狀態(tài)進(jìn)行實(shí)時(shí)監(jiān)測(cè)并將采集到的信號(hào)傳輸給主控制器來決定是否進(jìn)行釋放氣囊操作。救生氣囊的設(shè)計(jì)制造成本相對(duì)低廉,可在日常生活中得到廣泛推廣應(yīng)用,減少由于墜機(jī)產(chǎn)生的損失。
1 系統(tǒng)整體功能設(shè)計(jì)
由于適用于無人機(jī)的救生氣囊需滿足體積小、承載能力足夠以及充氣快速等問題,以確保氣囊系統(tǒng)不會(huì)對(duì)無人機(jī)的飛行安全性造成影響,在滿足便捷性、安全性的同時(shí)不影響無人機(jī)的飛行平穩(wěn)性且能在緊急狀態(tài)下快速釋放氣囊。無人機(jī)的智能救生氣囊設(shè)計(jì)在加裝氣囊的同時(shí)需滿足報(bào)警和通信功能,可以使無人機(jī)在執(zhí)行特定任務(wù)時(shí)更加安全。例如,在進(jìn)行近水面飛行時(shí),由于無人機(jī)有自動(dòng)測(cè)距功能在距離水面過近的地方會(huì)自動(dòng)切換到著陸模式,而操作員無法在很短的時(shí)間內(nèi)去改變無人機(jī)的飛行狀態(tài),這就造成了無人機(jī)的墜毀,此時(shí)只能通過無人機(jī)提供的落水位置信息來搜尋無人機(jī),這大大增加了搜尋難度。如果無人機(jī)上裝配有救生氣囊及報(bào)警通信系統(tǒng),在發(fā)生緊急情況時(shí)無人機(jī)的搜尋難度會(huì)顯著下降,同時(shí)也降低了后續(xù)的維修費(fèi)用。
無人機(jī)救生氣囊系統(tǒng)與操作者之間的通訊是本系統(tǒng)的核心部分,需要滿足快速通訊且通訊距離長等特點(diǎn),本系統(tǒng)采用NB-IOT模塊實(shí)現(xiàn)操作者對(duì)救生氣囊系統(tǒng)的遠(yuǎn)程控制,可實(shí)現(xiàn)信息的采集傳輸并發(fā)送釋放指令等功能。
當(dāng)測(cè)距模塊檢測(cè)到無人機(jī)當(dāng)前飛行狀態(tài)距離地面過低時(shí),通過NB-IOT模塊的網(wǎng)絡(luò)傳輸功能將信號(hào)發(fā)送到操作者手機(jī),操作者可發(fā)送信號(hào)到無人機(jī)氣囊系統(tǒng)控制氣囊是否釋放,從而起到對(duì)無人機(jī)的保護(hù)功能。
當(dāng)無人機(jī)遇到緊急狀況墜入水底時(shí),釋放的救生氣囊可將無人機(jī)拖出水面,并且氣囊需要在極短時(shí)間內(nèi)完成充氣,從而對(duì)無人機(jī)起到保護(hù)作用。
2 硬件設(shè)計(jì)
救生氣囊的硬件總體設(shè)計(jì)框圖如圖1所示。系統(tǒng)硬件結(jié)構(gòu)主要包括STM32F103C8T6單片機(jī)控制模塊、晶振電路模塊、電源與復(fù)位電路模塊、NB-IOT通訊模塊以及緊急報(bào)警模塊[2]。

圖1 系統(tǒng)總體設(shè)計(jì)框圖
2.1 單片機(jī)控制模塊
采用的STM32F103C8T6芯片是一款基于ARM Cortex-M內(nèi)核STM32系列的32位微控制處理器,程序存儲(chǔ)器容量位64KB,工作電壓為2V-3.6V,可滿足本系統(tǒng)設(shè)計(jì)的控制要求,并且價(jià)格低廉,設(shè)計(jì)簡(jiǎn)便[3-4]。可通過該微處理器實(shí)現(xiàn)測(cè)距、收發(fā)信號(hào)、釋放氣囊等功能,它是整個(gè)系統(tǒng)的核心組成部分。在設(shè)計(jì)中,緊急報(bào)警模塊是否啟動(dòng)就是通過改變單片機(jī)的輸出電壓來實(shí)現(xiàn)的。單片機(jī)設(shè)計(jì)電路原理圖如圖2所示。

圖2 單片機(jī)設(shè)計(jì)電路原理圖
2.2 晶振電路模塊
氣囊系統(tǒng)所采用的外界晶振電路可為單片機(jī)提供穩(wěn)定的時(shí)鐘脈沖,不易受到外界干擾。設(shè)置系統(tǒng)所要求的時(shí)鐘頻率,對(duì)于整個(gè)系統(tǒng)來說起著事關(guān)重要的作用。救生氣囊系統(tǒng)每一項(xiàng)功能的實(shí)現(xiàn)都離不開晶振電路提供的時(shí)鐘節(jié)拍,晶振提供的時(shí)鐘頻率越高,單片機(jī)的運(yùn)行速度也就越塊。
在本系統(tǒng)中晶振電路采用STM32單片機(jī)內(nèi)嵌有8MHz振蕩器,晶振電路也采用外接8MHz晶振,采用皮爾斯振蕩器配置,用于機(jī)械式諧振器件,可良好適配氣囊系統(tǒng)的要求。
2.3 電源與復(fù)位電路模塊
通過選用鋰電池實(shí)現(xiàn)對(duì)系統(tǒng)的整體供電,系統(tǒng)供電電路如圖3所示,鋰電池具有電壓穩(wěn)定、低能放電、防爆設(shè)計(jì)以及循環(huán)充電等優(yōu)點(diǎn)。鋰電池可提供穩(wěn)定的供電,采用低自放電技術(shù)減少電量自然流失,內(nèi)置智能IC芯片可做到安全防爆。

圖3 供電電路
復(fù)位電路可實(shí)現(xiàn)系統(tǒng)的復(fù)位歸零,按下按鈕時(shí)系統(tǒng)可由任意狀態(tài)轉(zhuǎn)變?yōu)槌跏紶顟B(tài),即NB-IOT模塊重新開始接收單片機(jī)信號(hào),開始新指令的收發(fā)。復(fù)位電路采用3.3V電壓供電,利用電容電壓不能突變的原理,使得系統(tǒng)上電時(shí)提供的復(fù)位脈沖不斷給電容供電,實(shí)現(xiàn)系統(tǒng)的自動(dòng)初始化。同時(shí)也可通過按鍵提供一個(gè)反向電平實(shí)現(xiàn)系統(tǒng)手動(dòng)復(fù)位。
2.4 NB-IOT通訊模塊
NB-IOT是窄帶物聯(lián)網(wǎng)的縮寫,適用于多種場(chǎng)合,可結(jié)合GMS網(wǎng)絡(luò)、UMTS網(wǎng)絡(luò)或LTE網(wǎng)絡(luò)實(shí)現(xiàn)通訊傳遞等功能。本系統(tǒng)中主要利用NB-IOT結(jié)合GMS網(wǎng)絡(luò)實(shí)現(xiàn)系統(tǒng)的原距離通訊,其優(yōu)勢(shì)在于工作能耗低、待機(jī)時(shí)間長、網(wǎng)絡(luò)覆蓋范圍廣、低成本且可實(shí)現(xiàn)高效連接。
本系統(tǒng)所采用的NB-IOT型號(hào)為WH-NB75-BA,采用插針式封裝,自帶SIM卡槽,便于嵌入開發(fā);與GPRS、4G模塊硬件封裝兼容,減少更換成本;支持6路指令傳輸以及CoAP通訊模式[5];可實(shí)現(xiàn)自定義編程,傳輸速度快,發(fā)送數(shù)據(jù)時(shí)會(huì)不斷檢測(cè)相鄰2個(gè)字節(jié)的間隔時(shí)間,時(shí)間閾值設(shè)置為100ms,若時(shí)間間隔大于等于時(shí)間閾值時(shí)則認(rèn)為一幀結(jié)束。NB-IOT通訊模塊電路如圖4所示。

圖4 NB-IOT 通訊模塊電路
2.5 緊急報(bào)警模塊
在緊急報(bào)警模塊中主要包括氣囊釋放以及聲光報(bào)警。當(dāng)無人機(jī)處于緊急情況下,操作者可通過通訊模塊傳輸回的信息及時(shí)判斷是否需要釋放氣囊,若釋放氣囊信號(hào)發(fā)出,此時(shí)單片機(jī)的39號(hào)端口輸出高電平,電磁推桿裝置啟動(dòng),利用電磁鐵中動(dòng)鐵芯與靜鐵芯的吸合實(shí)現(xiàn)推桿直線運(yùn)動(dòng),將安全氣囊的開關(guān)吸出,實(shí)現(xiàn)氣囊的快速釋放。氣囊釋放模塊控制電路如圖5所示。
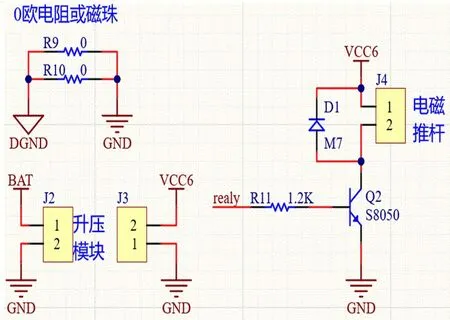
圖5 氣囊釋放控制電路
當(dāng)救生氣囊成功釋放之后,聲光報(bào)警電路自動(dòng)開始工作。單片機(jī)的38號(hào)端口連接的聲光報(bào)警裝置,由電阻、三極管、電容、LED管以及蜂鳴器等組成。
救生氣囊系統(tǒng)采用獨(dú)立供電,不會(huì)因?yàn)闊o人機(jī)墜機(jī)導(dǎo)致斷電無法提供位置信息而難于尋找的情況發(fā)生。即使無人機(jī)墜落斷電,救生氣囊系統(tǒng)仍可正常運(yùn)行,通過NB-IOT模塊發(fā)送無人機(jī)的實(shí)時(shí)位置信息,并通過蜂鳴器和LED燈光使得無人機(jī)墜落位置更加便于尋找,降低搜索難度。
3 軟件設(shè)計(jì)
無人機(jī)智能救生氣囊的程序流程圖如圖6所示。系統(tǒng)的運(yùn)行模塊主要包括NB-IOT信號(hào)傳輸模塊以及警告報(bào)警模塊。其功能選擇是依據(jù)具體情況而定,正常飛行狀態(tài)下,傳感器測(cè)距及NB-IOT模塊持續(xù)工作,將無人機(jī)信息傳輸給操作者,當(dāng)操作者意識(shí)到無人機(jī)可能處于危險(xiǎn)狀態(tài)可自主選擇是否按下按鈕實(shí)現(xiàn)氣囊釋放。若釋放氣囊,此時(shí)系統(tǒng)進(jìn)入緊急報(bào)警狀態(tài),氣囊釋放并伴隨有聲光報(bào)警。

圖6 程序流程圖
在軟件設(shè)計(jì)過程中先對(duì)系統(tǒng)進(jìn)行可行性分析,設(shè)定測(cè)距傳感器發(fā)出提示信號(hào)的合適距離,設(shè)定NB-IOT通訊模塊在測(cè)量距離小于安全距離時(shí)向操作者發(fā)出報(bào)警信號(hào)發(fā)出的時(shí)機(jī)。
NB-IOT通訊模塊使用UDP協(xié)議,在通訊模塊運(yùn)行過程中操作者不需要關(guān)注串口數(shù)據(jù)與網(wǎng)絡(luò)數(shù)據(jù)包之間的數(shù)據(jù)轉(zhuǎn)換過程,只需通過簡(jiǎn)單的參數(shù)設(shè)置即可實(shí)現(xiàn)操作者與無人機(jī)間的遠(yuǎn)距離數(shù)據(jù)傳輸。NB-IOT模塊提供兩路socket連接,在通訊過程中模塊上電便實(shí)現(xiàn)自動(dòng)駐網(wǎng),通過GMS網(wǎng)絡(luò)實(shí)現(xiàn)快速的信號(hào)傳輸。
4 結(jié)語
無人機(jī)智能救生氣囊系統(tǒng)采用STM32單片機(jī)作為主控芯片來實(shí)現(xiàn)系統(tǒng)的各項(xiàng)功能,并結(jié)合物聯(lián)網(wǎng)技術(shù)實(shí)現(xiàn)信息的快速傳輸,設(shè)計(jì)的系統(tǒng)可穩(wěn)定高效地完成指定功能,對(duì)無人機(jī)起到一定的保護(hù)作用。該系統(tǒng)是一個(gè)可靈活安裝于無人機(jī)上的獨(dú)立保護(hù)裝置,在不影響無人機(jī)正常工作的情況下對(duì)無人機(jī)進(jìn)行保護(hù),可減少無人機(jī)墜機(jī)危險(xiǎn),降低維修成本。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
