四旋翼飛行器姿態(tài)控制研究
2022-01-11 09:42:40郭康傅強張先浩羅鐘梅
現(xiàn)代計算機 2021年32期
郭康,傅強,張先浩,羅鐘梅
(中國民航飛行學院,廣漢 618307)
0 引言
在第二次世界大戰(zhàn)結束后,科學技術取得了巨大的進步,旋翼飛行器等相關領域的技術也取得了長足的發(fā)展。截至今日,旋翼飛行器已經研發(fā)出了上百種,應用領域越來越廣泛。民用上,人們已經可以利用旋翼飛行器在空中飛行時產生的氣流對農作物噴灑農藥、利用旋翼飛行器在空中飛行時的廣闊視角進行航拍、利用旋翼飛行器體積小、靈活的優(yōu)勢遠距離運輸各類商品等。2016 年4 月的一個上午,在江蘇某倉儲公司的儲存罐區(qū)交換泵房內,工作人員由于違規(guī)使用電焊而引發(fā)火災,導致附近的兩個儲油罐燃燒了起來,火勢非常地猛烈,燃燒地面積非常大,火災的周圍還有很多油品儲罐和化學危險品儲罐等高危化工品,形勢十分緊迫。當天,大疆創(chuàng)新的代理商常州賽思迅速完成了設備整備和人員集結,并且攜帶三架配備有相機的飛行器,在火災上空進行實時拍攝,通過飛行器攜帶的相機透過濃煙從空中獲取全景,準確傳達火警信息,對下一步的救援行動起到了很大的幫助。軍用上,旋翼飛行器已經成為大多數(shù)國家信息化作戰(zhàn)必不可少的裝備,它為人類開啟了智能遠程攻擊武器主導的新篇章。挪威prox dynamics公司設計的“黑熊蜂”飛機重約16 g,體積非常小,人們可以把它裝進口袋,非常地方便。而且,飛行器的電機在飛行的時候幾乎不產生噪音,可以飛行25 分鐘,向1 km 以外的軍人傳遞其所拍攝的圖像和視頻。這樣,口袋飛行器有利于偵查任務的隱蔽性,能很好地完成任務。
根據(jù)首屆中國通用航空適航認證發(fā)展論壇,截至2019 年5 月26 日,中國共有1353 家飛機制造商,注冊飛機330034 架,注冊用戶310218 架,表明中國飛機工業(yè)的發(fā)展趨勢越來越好,市場的規(guī)模在不斷擴大[1]。根據(jù)美國航空協(xié)會網站的報告,截至2018年1月19日,美國聯(lián)邦航空局注冊的無人機數(shù)量超過100 萬架。可以看出,無論是在國內還是國外,無人機的發(fā)展規(guī)模都在不斷擴大,未來將發(fā)揮更加重要的作用。
四旋翼飛行器是不以載人為目的的航空器,其外表呈現(xiàn)出碟的形狀,屬于非共軸式的飛行器[2]。同傳統(tǒng)飛行器比較,四旋翼飛行器有著獨特的特點:
(1)在操作控制方面,四旋翼飛行器構造十分精巧,人們可以操作四旋翼飛行器輕易地實現(xiàn)垂直的升起和降落運動。
(2)在機動性方面,四旋翼飛行器非常靈活[3]。
(3)在安全性方面,四旋翼飛行器的隱蔽性很好。
針對四旋翼飛行器的研究中,通過LQR 和預測控制的多種變量進行多種變量來進行姿態(tài)控制,實現(xiàn)了解耦能力的提升,但是運算起來比較復雜,而通過調制合適的PID 參數(shù),設計出控制能力較好的PID 控制器,有利于提升四旋翼飛行器控制平衡的能力[4,5]。
1 四旋翼飛行器的動力學模型
1.1 坐標系的建立
在理想情況下,四旋翼動力學分析中常用的坐標系是機體坐標系Fb=(O,Xb,Yb,Zb)與地面坐標系F=(O,X,Y,Z)[6]。
當固定在航空器建立三維空間坐標系的時候,由于四旋翼飛行器四個旋翼之間的作用是相同的,所以可以把飛行器的質心作為飛行器的原點,然后選定四個旋翼中任一旋翼的機臂的方向作為X軸的方向,再逆時針選定與這個機臂呈90°垂直的另一個旋翼機臂作為Y軸的方向,最后選定與這個兩個機臂形成的面呈垂直向上的方向作為Z軸的方向。
為了便于了解和控制四旋翼飛行器的飛行狀態(tài),可以在建立的坐標系基礎下給出如下三個角的定義:
(1)滾轉角φ:OY與在YOZ平面的投影之間的夾角。
(2)俯仰角θ:OZ與在XOZ平面的投影之間的夾角[7]。
(3)偏航角ψ:OX與在XOY平面的投影之間的夾角。
1.2 動力學模型建立
通過采用牛頓歐拉動力學和質心運動的相關理論、公式,可以推導出來四旋翼飛行器的動力學模型[8]:

其中,Ix,Iy,Iz作為四旋翼飛行器在三維空間機體坐標系下的轉動慣量,U1,U2,U3,U4作為四旋翼飛行器的控制量。
1.3 PID控制器
PID 控制器又稱比例積分-微分控制器,由比例、積分和微分三部分組成,PID 控制是工業(yè)控制應用中反饋回路的一個常見組成部分。控制器將收集到的數(shù)據(jù)與參考值進行比較,并使用差值計算新的輸入值,以達到或維持系統(tǒng)數(shù)據(jù)的參考值[9]。PID控制器可以根據(jù)歷史數(shù)據(jù)和不同的發(fā)生率,通過各種控制操作使用其他簡單的控制來改變輸入值,使系統(tǒng)更加準確和穩(wěn)定,比例控制室、積分控制室、差動控制室相互關聯(lián),三個參數(shù)可以單獨調整,也可以使用一兩個控制規(guī)則[10]。也就是說,PID控制器中各個環(huán)節(jié)的作用如下:
(1)比例控制。比例控制是最簡單的控制方法之一。控制器的輸出與輸入誤差信號成比例。只有比例控制可用時的系統(tǒng)輸出存在穩(wěn)態(tài)偏差。比例鏈路可以快速減小誤差,加快響應速度。
(2)積分控制。在積分控制中,控制器輸出與輸入誤差信號的積分成正比。積分項的誤差取決于時間積分。隨著時間的推移,積分項會增加。因此,即使誤差很小,積分項也會隨時間增加,從而增加控制器的輸出并使穩(wěn)態(tài)誤差更為零。
(3)差速控制。在控制器中引入比例項通常是不夠的。比例項的作用只是放大偏差的大小。這種差異使您可以預測錯誤變化的趨勢和錯誤變化的趨勢。抑制誤差的控制效果預先為零甚至為負,以避免控制量的嚴重超調。如果差分鏈路過大,系統(tǒng)的抗干擾能力將顯著降低。合理的差分鏈路可以加快系統(tǒng)速度,減少調諧時間,減少系統(tǒng)過沖。
2 實驗分析
我們可以把PID控制簡單地看成比例、積分和微分線性化地組合在一起,PID控制器的控制系統(tǒng)的性能可以依靠響應時間、超調范圍和積累的穩(wěn)態(tài)誤差作為判別的指標,我們不考慮環(huán)境因素和硬件因素,對PID 控制器的比例參數(shù),積分參數(shù),還有微分參數(shù)不斷地調整和優(yōu)化,精確地調節(jié),保證系統(tǒng)到達我們想要調節(jié)的最佳穩(wěn)定狀態(tài)。
利用MATLAB中的Simulink進行建模、仿真,根據(jù)系統(tǒng)框圖,劃分各個子系統(tǒng),在模塊庫中拖拽所需要的模塊并進行連接,然后給各個模塊設置好所需要的參數(shù),保存模型,進行仿真;最后不斷調試參數(shù),直到結果符合要求。
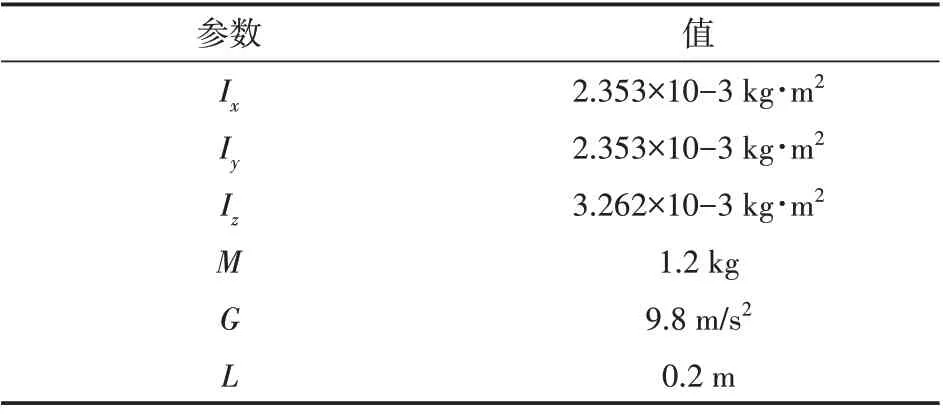
表1 四旋翼模型的參數(shù)
然后可以利用模塊化的流程,構造出流程圖,輸入各個變量,進行仿真,通過改變比例、積分、微分的參數(shù),驗證控制算法的可行性,利用Simulink 仿真平臺搭建的姿態(tài)控制器的模型如圖1所示。
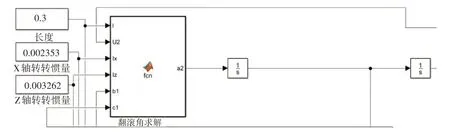
圖1 姿態(tài)控制器的模型
通過對四旋翼飛行器所受力曲線圖的觀察,我們可以發(fā)現(xiàn)這四個力的曲線趨勢有著差異,但是它們最終的趨勢都是2.94,也就是我們所給定的重力mg的四分之一,這說明在飛行器姿態(tài)保持穩(wěn)定的時候,四旋翼飛行器每個旋翼作用在飛行器上的升力值為重力值的四分之一,結果如圖2所示。
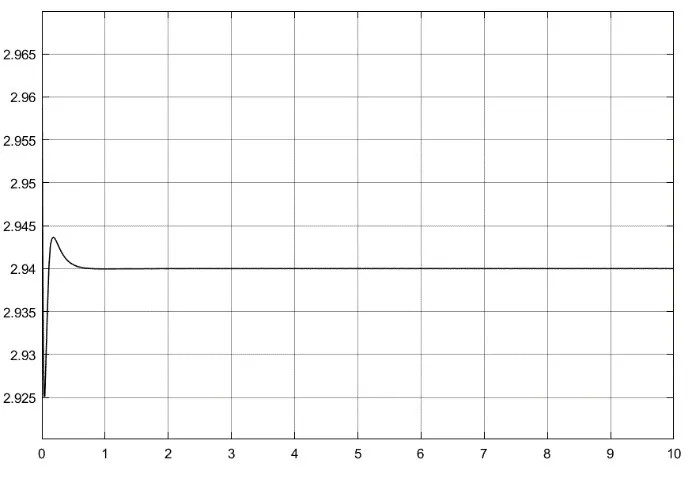
圖2 升力F3變化曲線
四旋翼飛行器的穩(wěn)定飛行需要保證姿態(tài)角的穩(wěn)定控制,在仿真軟件中對四旋翼飛行器的姿態(tài)角給予指令,翻滾角=0.1°,俯仰角=0.2°,偏航角= 0.3°,在t= 0 這一時刻分別給翻滾角、俯仰角、偏航角階躍指令信號,仿真時間定為10 s,最后得到如圖3所示的結果。

圖3 翻滾角變化曲線
通過上面的翻滾角在PID 控制器下的曲線,我們可以發(fā)現(xiàn)姿態(tài)角都能夠在幾秒內完全進入穩(wěn)態(tài),最終趨近于我們的給定狀態(tài)—零,這說明PID控制器對階躍信號指令的靜態(tài)跟蹤良好。
3 結語
在新時代的快速發(fā)展后,飛行器正在進入大家的視野,在日常生活中不斷地發(fā)揮出其巨大的作用,而四旋翼飛行器在飛行器中有著其獨特的優(yōu)勢與地位。因此,四旋翼飛行器的研究前景十分光明,對四旋翼飛行器的研究有很大的實用價值。
本文對四旋翼飛行器進行了一定的研究,對四旋翼飛行器的相關發(fā)展起到一定的幫助。但是,還有許多的問題沒有能夠研究學習,PID 控制器的控制參數(shù)也可以進一步進行優(yōu)化,我認為本文還可以從以下幾個方面進行修正:首先,在動力學建模的時候,忽略了很多因素,應該可以逐步把這些參數(shù)添加進去進行更為仔細的研究;其次,仿真驗證的時候,可以更為精確地調整PID 控制器的參數(shù),得到更為準確、形象的曲線圖。
