
基于可變導向車道的交叉口時空資源協同優化方法
2022-01-12 04:40:54王連震王宇萍
武漢理工大學學報(交通科學與工程版) 2021年6期
王連震 王宇萍 姚 麗
(東北林業大學交通學院1) 哈爾濱 150040) (哈爾濱市城鄉規劃設計研究院2) 哈爾濱 150000)(哈爾濱工業大學交通科學與工程學院3) 哈爾濱 150001)
0 引 言
目前對于城市道路平面交叉口的交通組織主要包括進口道渠化和信號控制兩方面.為了適應復雜多變的交通流在交叉口的通行需求,國內外學者在信號配時與車道功能分配上都提出了有效的優化方法.
可變導向車道可進行車道功能的動態分配,提升交叉口通行效率.國內外學者對此開展了大量富有成效的研究.以交叉口平均延誤最小為目標,Assi等[1]提出了基于實時交通流數據快速確定車道組動態功能最優組合的方法.Alhajyaseen等[2]則基于交叉口的幾何數據及交通量數據建立了確定車道組功能的動態模型.William 等[3]建立了時空資源協同優化模型,具有一定的可行性.Wong等[4]建立了單個交叉口的時空資源優化模型,對降低車輛延誤具有顯著效果.鐘章建等[5]以最小化交叉口進口道車均延誤時間為目標,構建了進口道車道動態分配模型.趙靖等[6]以關鍵流量比之和最小為優化目標,建立了動態車道功能優化模型.
具體實踐方面,Harvey等[7]研究了對車道功能進行動態劃分的指示標志,但并未給出可變導向車道的具體控制策略.Hoose[8]根據交通管理規則制定了導向車道的控制策略,能有效保證道路使用者的正常通行和安全性.Wolshon等[9]分析了可變導向車道技術的使用條件,并探討了與之配套的交通設施.周立平等[10]研究了可變導向車道的具體設計方法,包括確定車道長度的最小值及最大值.周洋等[11]通過對設置了可變導向車道系統的交叉口進行實地勘察,優化了車輛檢測器的埋設位置.
在可變導向車道功能切換條件方面,傅立駿等[12]提出了基于神經網絡算法的可變車道自適應優化方案,能有效降低車均延誤和排隊長度.張東明等[13]根據實時采集的交通量數據,提出可變車道功能轉變的條件.陳東靜等[14]提出了通過設置預換道線和預信號進行車道功能切換的控制策略.徐紅嶺[15]提出了改變車道功能屬性的閾值條件.常玉林等[16]建立了可變導向車道自適應控制模型,通過在交叉口鋪設檢測器獲取實時交通流數據,并以此作為計算依據,根據直行、左轉車流的時空需求度變化,實時判別可變導向車道方向屬性.李燦等[17]通過對進口道交通流量、交通流向等因素進行分析,以交叉口進口道車均延誤為判別指標,以進口道左轉、直行流量為主要判別條件,建立了交叉口可變導向車道控制閾值綜合模型,并繪制閾值曲線.丁靖[18]通過交叉口可變導向車道的車道功能與信號配時的協同優化,構建優化模型,對交叉口時空資源進行優化配置,以達到交叉口車輛平均延誤最小的目標.李麗麗等[19]提出了主預信號和雙停車線法以解決可變導向車道功能切換時刻不同轉向車輛的誘導問題.
已有研究中,針對信號交叉口單獨進行空間優化或時間優化的研究相對較多,而將信號配時與車道功能進行協同優化的研究較少.基于此,文中提出基于可變導向車道的交叉口時空資源協同優化方法,將車道功能的動態分配與交叉口信號配時相結合,用以適應交叉口復雜多變的交通流通行需求,降低交叉口車均延誤.
1 交叉口時空資源協同優化方法
1.1 優化模型
車均延誤是評價信號控制交叉口服務水平的重要指標,本文以車均延誤作為衡量交叉口進口道時空資源協同優化方案評價的指標,同時將其作為判斷車道功能是否切換的依據.
以車均延誤最小為優化目標,建立的優化目標函數為
(1)
約束條件:
(2)

為保證模型的實用性,提出如下基本假設.
1) 因為右轉車流無信號控制,其延誤可忽略,在此只計算左轉車道組和直行車道組的車均延誤.
2) 切換可變導向車道的方向屬性后,直行、左轉車流的到達率不會改變.
3) 直行、左轉車輛在車道組內的各車道上均勻分布.
文中建立的車均延誤最小模型通過對比車道功能切換前后車輛的車均延誤作為車道功能切換與否的判斷依據.若可變導向車道功能切換后交叉口的車輛平均延誤小于未切換的狀態時,則P=1,將車道功能進行切換,同時對交叉口進行信號配時優化;反之,則P=0,不切換車道功能,僅對交叉口進行信號配時優化.可變導向車道功能切換判斷流程見圖1.

圖1 可變導向車道功能切換流程
1.2 電子指示牌與預信號設置
為了誘導駕駛人能夠按照可變導向車道的變換選擇車道行駛,文中擬設置一組車道功能電子指示牌、一組預信號指示燈及預停車線,見圖2.

圖2 車道功能電子指示牌、停車線設置位置示意圖
車道功能電子指示牌可以實時為駕駛人員傳達車道功能信息,并使駛入該車道不可變道段的車輛確定行駛方向;預停車線的設置是為了使直行車輛在此處排隊,為左轉車輛預留出行駛空間.預信號由綠燈變為紅燈后,直行車輛在此停車,與該車道相鄰的左轉車道上的車輛在經過該停車線后可變道進入該停止線前方的車道空間內,待主信號左轉綠燈亮起時,從該可變車道駛離交叉口,其作用相當于增加了一條放行的左轉車道.
可變導向車道功能指示牌設置在交叉口不可變道段進口道處;預停車線位置距離進口道停車線的長度為lt,其設置的具體位置應滿足:
(3)

當主信號直行綠燈結束前,預信號應切換為紅燈,主要作用是清空兩停車線之間的直行車輛,確保左轉車進入該可變車道后前方無直行車阻擋;當主信號左轉綠燈結束前,預信號應切換為綠燈,主要作用是為了清空可變導向車道內的左轉車輛,使直行車輛可進入該車道內排隊,并在下一周期該進口直行綠燈開啟時,駛離交叉口.根據上述方法,實現可變導向車道在單周期內的切換.預信號與主信號的切換時間差按式(4)~(5)計算.
因為車道功能電子指示牌距離停車線有一定距離,因此車道功能電子指示牌變換車道功能的顯示應提前于該方向左轉綠燈信號燈顯示,二者顯示的時間差按式(6)計算.
(4)
lt=L1+L2
(5)
(6)
式中:Δt1為預信號與主信號切換時間差,s;Δt2為電子指示牌與主信號切換時間差,s;L1為不可變道段長度,m;L2為電子指示燈與停車線之間的距離,m.
1.3 數據采集與處理
在各進口道車道組鋪設感應線圈檢測器,檢測器距離進口道停車線的距離應滿足:
(7)

檢測器數據提取周期根據信號周期確定,即每周期提取一次測量數據.通過檢測器獲得上一周期交叉口各進口道的駛入車輛,可以計算得到在第n個周期進口道各車道組的平均車輛到達率:
(8)
式中:qi為車道組i平均每條車道到達率,pcu/s;Ni為通過車道組i的檢測器的車輛數,pcu;T為信號周期時長,s;ni為車道組i包含的車道數目.
2 案例分析
2.1 案例說明
以哈爾濱市黃河路某交叉口作為案例,該交叉口為典型的四相位信號控制交叉口,該交叉口現狀信號配時方案見圖3,各進口道車道功能劃分見圖4.各進口道高峰小時交通量見表1.

圖3 現狀信號配時方案(單位:s)
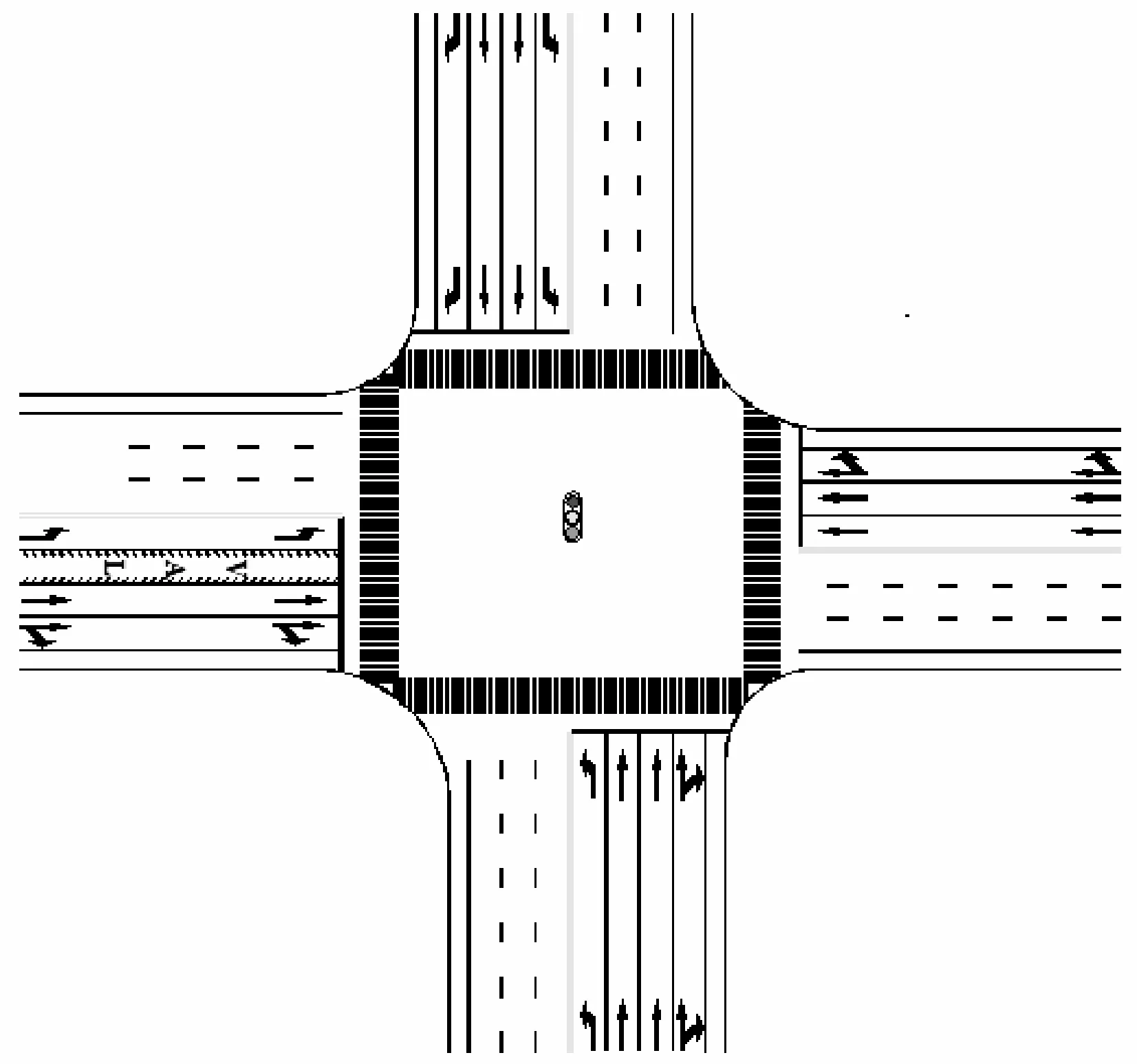
圖4 交叉口各進口道車道功能示意圖

表1 交叉口晚高峰時段小時交通量
2.2 優化方案
根據該交叉口現狀,文中分別從信號配時優化、可變導向車道設置等方面提出3種優化方案,其中方案1為只進行信號優化控制方案,方案2為只切換可變導向車道方案,方案3為時空資源協同優化方案,即同時進行信號配時優化及車道功能切換.其中方案4為交叉口現狀控制方案.采用Vissim仿真的方法對各個方案進行評價,仿真參數設置見表2.

表2 交通仿真基本參數
2.3 仿真結果分析
為了保證仿真數據的正確性,去除前三個周期仿真數據后得到最終仿真分析結果見表3.

表3 交叉口不同控制方案下車輛平均延誤仿真結果
由表3可知,采用信號配時優化方案(方案1)后,交叉口車均延誤降低了4.6%;采用只切換可變導向車道的方案(方案2)后,交叉口車均延誤降低了2.4%;采用時空資源協同優化方案(方案3)后,交叉口車均延誤降低了21.3%,說明文中提出的交叉口時空資源協同優化方案可以有效降低交叉口的車均延誤,提高交叉口通行效率.
3 結 論
1) 以直行和左轉方向車均延誤最小為判別標準,提出了可變導向車道功能是否切換的判斷依據.
2) 提出了通過設置預停車線、預信號與車道功能電子指示牌相結合對交叉口進口道車輛進行誘導的方法,并分別給出了預信號、電子指示牌信號與主信號間的切換時間差計算方法,引導直行和左轉車輛按信號使用可變導向車道.
3) 通過Vissim仿真軟件以哈爾濱市黃河路某交叉口為例進行仿真,將車均延誤作為評價指標,對四種方案進行評價.結果表明,本文提出的切換可變導向車道并進行信號配時優化的方案對降低交叉口車均延誤有較好的效果,可用于改善信號交叉口的通行效率.
4) 可變導向車道可能會增加車道原行駛方向車輛的延誤,今后將進一步結合交叉口的幾何及交通條件,開展左轉車輛排隊空間、直左車流的相互影響、車輛誘導及清空等對可變導向車道設置的研究.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中國科技論壇(2017年7期)2017-07-25 08:49:53
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
