
基于LSTM神經(jīng)網(wǎng)絡(luò)的隨機橫浪中船舶橫搖運動極短期預(yù)報
2022-01-12 04:14:46易文海高志亮
易文海 高志亮
(武漢理工大學(xué)船海和能源動力工程學(xué)院1) 武漢 430063) (高性能船舶技術(shù)教育部重點實驗室2) 武漢 430063)
0 引 言
船舶運動極短期預(yù)報[1]是指對船舶未來幾秒到十幾秒的運動姿態(tài)進行預(yù)報,其有效實現(xiàn)有助于保障船舶在海上航行及作業(yè)安全.船舶運動極短期預(yù)報理論多種多樣,已發(fā)展出自回歸法[2]、卡爾曼濾波法[3]、周期圖法[4]、支持向量機法[5]、人工神經(jīng)網(wǎng)絡(luò)法[6]等方法.
近年來,隨著人工神經(jīng)網(wǎng)絡(luò)算法的蓬勃發(fā)展,越來越多的學(xué)者運用人工神經(jīng)網(wǎng)絡(luò)進行船舶運動極短期預(yù)報.劉婉婷[7]分別采用卡爾曼濾波法、徑向基神經(jīng)網(wǎng)絡(luò)和Elman神經(jīng)網(wǎng)絡(luò)對船舶升沉運動進行預(yù)報,結(jié)果表明Elman神經(jīng)網(wǎng)絡(luò)有更好的預(yù)報精度.張澤國等[8]提出了一種自適應(yīng)變異的粒子群優(yōu)化算法與反向傳播(back-propagation,BP)神經(jīng)網(wǎng)絡(luò)結(jié)合的組合模型,運用該模型對科研教學(xué)船“育鯤”輪的橫搖運動數(shù)據(jù)進行實時預(yù)報,驗證了該方法的可行性和有效性.Li等[9]通過BP神經(jīng)網(wǎng)絡(luò)對船舶橫搖運動進行了預(yù)報,并與自回歸滑動平均方法進行了比較分析,結(jié)果表明:BP神經(jīng)網(wǎng)絡(luò)有更好的預(yù)報精度.王國棟[10]用自回歸模型、傳統(tǒng)循環(huán)神經(jīng)網(wǎng)絡(luò)模型及長短期記憶(long short-term memory,LSTM)神經(jīng)網(wǎng)絡(luò)模型對實船橫搖和縱搖運動數(shù)據(jù)做了預(yù)測分析,結(jié)果表明LSTM神經(jīng)網(wǎng)絡(luò)有更好的預(yù)報精度.Zhang等[11]通過組合卷積神經(jīng)網(wǎng)絡(luò)和LSTM神經(jīng)網(wǎng)絡(luò)對實驗測得的橫搖數(shù)據(jù)進行了預(yù)測研究,證明了方法的有效性.彭秀艷等[12]在LSTM神經(jīng)網(wǎng)絡(luò)算法上整合了粒子群算法和經(jīng)驗?zāi)B(tài)分解算法,結(jié)果表明該混合模型有效提高了預(yù)報精度.
目前,在運用人工神經(jīng)網(wǎng)絡(luò)進行船舶運動預(yù)報方面,大多學(xué)者均基于船舶自身搖蕩運動歷時數(shù)據(jù)進行建模,而通過波高歷時數(shù)據(jù)進行船舶運動歷時預(yù)報的研究報道甚少.實際上,船舶搖蕩運動與波浪運動密切相關(guān),為了驗證利用波高歷時數(shù)據(jù)預(yù)報船舶運動歷時的可行性,文中基于Tensorflow平臺構(gòu)建LSTM神經(jīng)網(wǎng)絡(luò)模型,對基于隨機橫浪波高數(shù)據(jù)的船舶橫搖運動極短期預(yù)報方法進行研究.
1 LSTM神經(jīng)網(wǎng)絡(luò)模型
1.1 LSTM神經(jīng)網(wǎng)絡(luò)原理
LSTM神經(jīng)網(wǎng)絡(luò)是一種特殊的循環(huán)神經(jīng)網(wǎng)絡(luò),它首次由Hochreiter等[13]提出,它的出現(xiàn)有效解決了傳統(tǒng)循環(huán)神經(jīng)網(wǎng)絡(luò)梯度爆炸問題,同時LSTM神經(jīng)網(wǎng)絡(luò)能夠處理長時間序列數(shù)據(jù),具有長時記憶能力.波浪與船舶搖蕩運動存在著響應(yīng)關(guān)系,故可采用LSTM神經(jīng)網(wǎng)絡(luò)建立波浪和船舶運動時間序列的映射關(guān)系,從而進行船舶運動姿態(tài)的預(yù)報.
LSTM單元結(jié)構(gòu)由遺忘門、輸入門、輸出門和單元狀態(tài)組成,具體數(shù)學(xué)模型見文獻[14],單元結(jié)構(gòu)見圖1.在當前t時刻,LSTM網(wǎng)絡(luò)輸入?yún)?shù)有三個:當前時刻輸入值xt(如波高)、上一時刻輸出值ht-1(如船舶運動)、上一時刻單元狀態(tài)ct-1.輸出參數(shù)有兩個:當前時刻輸出值ht和當前時刻單元狀態(tài)ct.LSTM通過激活函數(shù)σ實現(xiàn)對三個門的控制,從而實現(xiàn)對歷史信息的保留與遺忘.
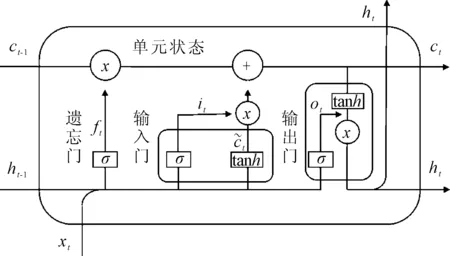
圖1 LSTM單元結(jié)構(gòu)圖
1.2 基于LSTM神經(jīng)網(wǎng)絡(luò)船舶運動預(yù)報
LSTM神經(jīng)網(wǎng)絡(luò)預(yù)報模型流程主要有數(shù)據(jù)輸入、數(shù)據(jù)預(yù)處理、LSTM模型參數(shù)設(shè)置、LSTM模型訓(xùn)練及預(yù)測、預(yù)測結(jié)果評估.
1.2.1船舶運動數(shù)據(jù)
通過基于勢流理論的船舶水動力計算軟件AQWA對DTMB5415艦船進行時域仿真,獲得LSTM模型所需數(shù)據(jù),船型參數(shù)見表1.首先將AQWA計算得到的橫搖頻率響應(yīng)函數(shù)與試驗測量結(jié)果[15]進行了對比驗證,證明了AQWA計算結(jié)果的可靠性,見圖2.接著通過AQWA時域計算模塊得到零航速下DTMB5415在三、四、五級隨機橫浪下的入射波高歷時數(shù)據(jù)以及船舶橫搖運動歷時數(shù)據(jù),用于LSTM模型訓(xùn)練預(yù)報,海況參數(shù)見表2,數(shù)據(jù)的采樣間隔為0.4 s,每組數(shù)據(jù)4 500個,總共時長1 800 s.
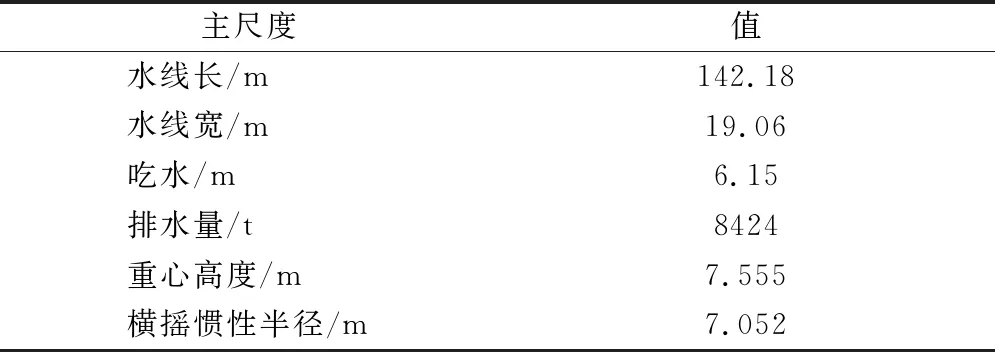
表1 DTMB5415船型參數(shù)
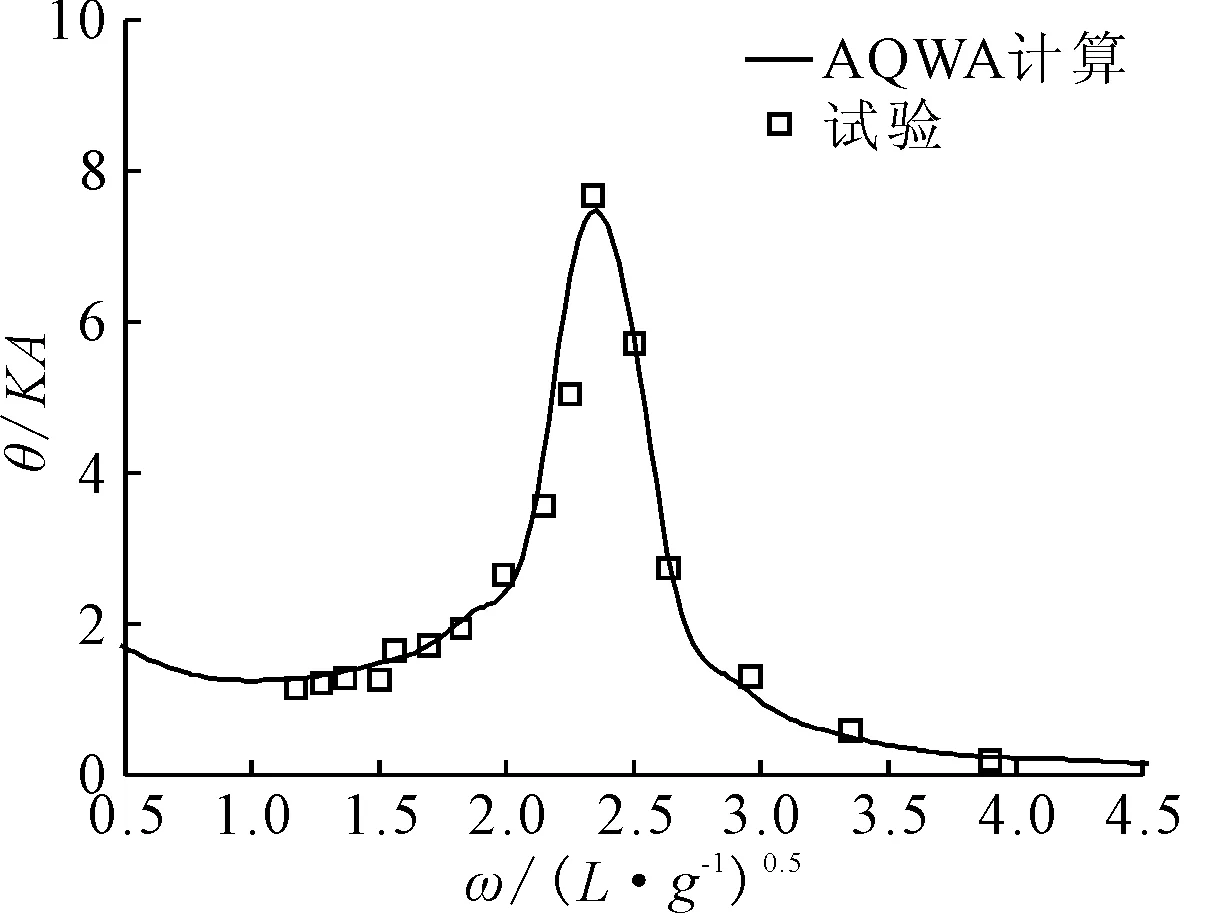
θ-橫搖角幅值;K-波數(shù);A-波幅;ω-波浪圓頻率;L-船舶水線長;g-重力加速度
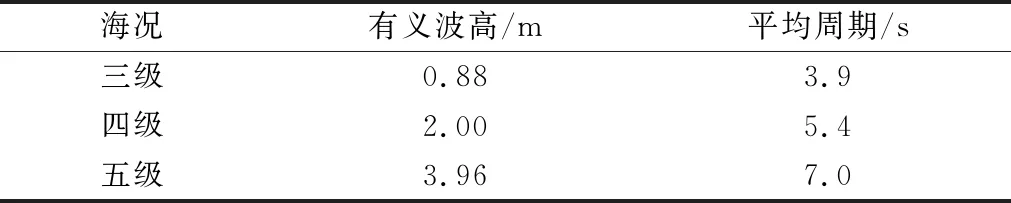
表2 海況參數(shù)
1.2.2數(shù)據(jù)預(yù)處理
對訓(xùn)練數(shù)據(jù)進行歸一化處理,歸一化數(shù)學(xué)表達如下.
(1)
式中:x*為歸一化數(shù)據(jù);x為原始數(shù)據(jù);xmin和xmax分別為原始數(shù)據(jù)中最小值和最大值數(shù)據(jù).
1.2.3LSTM模型參數(shù)
LSTM神經(jīng)網(wǎng)絡(luò)參數(shù)主要有輸入步數(shù)、神經(jīng)元節(jié)點數(shù)、隱藏層數(shù)、優(yōu)化器類型及學(xué)習(xí)率、訓(xùn)練迭代輪數(shù)、訓(xùn)練批次大小等.其中有些參數(shù)設(shè)置不僅影響著模型訓(xùn)練效率,同時影響預(yù)報精度,所以需通過選取合適的模型參數(shù),在保證預(yù)報精度的同時有效提高訓(xùn)練效率.
文中主要對輸入步數(shù)對結(jié)果的影響進行分析.輸入步數(shù)代表著輸入數(shù)據(jù)的時間序列長度,它直接影響著預(yù)測結(jié)果的準確性.理論上輸入步數(shù)越多,神經(jīng)網(wǎng)絡(luò)越能抓取時間序列數(shù)據(jù)的特征;但輸入步數(shù)過多,LSTM神經(jīng)網(wǎng)絡(luò)可能會提取無用信息導(dǎo)致出現(xiàn)過擬合現(xiàn)象,影響預(yù)報精度,同時輸入步數(shù)過大會導(dǎo)致計算量加大,增加訓(xùn)練時間,所以要選取合適的輸入步數(shù)來保證預(yù)報精度和計算效率.
1.2.4LSTM模型訓(xùn)練及預(yù)測
分別建立基于波高歷時數(shù)據(jù)和基于船舶自身橫搖歷時數(shù)據(jù)作為輸入數(shù)據(jù)的LSTM模型,用于預(yù)報船舶橫搖運動歷時.假設(shè)波高時間序列數(shù)據(jù)為(h1,h2,…,ht),船舶橫搖角度數(shù)據(jù)為(θ1,θ2,…,θt);在進行訓(xùn)練及預(yù)測時,對輸入數(shù)據(jù)進行滑窗,組成輸入向量組X,窗口長度為j(j小于t),窗口長度即為輸入步數(shù).輸出向量組Y為每個窗口對應(yīng)的船舶橫搖角度數(shù)據(jù)θj+n,其中:n為預(yù)測間隔步數(shù),用來控制提前預(yù)報時長,提前預(yù)報時長為n乘以數(shù)據(jù)采樣間隔.當n=0時,預(yù)測模型為用當前時刻及前一段時間的輸入數(shù)據(jù)預(yù)測當前時刻的船舶橫搖角度;當n>0時,預(yù)測模型為用當前時刻及前一段時間的波數(shù)據(jù)預(yù)測未來第n個數(shù)據(jù)時刻對應(yīng)的船舶橫搖角度.
1.2.5預(yù)測結(jié)果評估
預(yù)測結(jié)果采用最大絕對誤差(maximum absolute error,MAE)和均方根誤差(root mean square error,RMSE)方式來評判,其中最大絕對誤差給出了預(yù)測過程中誤差的最大值,均方根誤差則體現(xiàn)了整體預(yù)測誤差情況.MAE和RMSE數(shù)學(xué)表達如下.
MAE=max(|predictioni-labeli|)
(2)
(3)
式中:prediction為預(yù)測值;label為理論值.
2 LSTM模型驗證結(jié)果及分析
LSTM模型主要參數(shù)設(shè)置如下:神經(jīng)元節(jié)點數(shù)為16,隱藏層層數(shù)為2,優(yōu)化器選擇為Adam(adaptive moment estimation),學(xué)習(xí)率設(shè)置為0.000 6,訓(xùn)練迭代輪數(shù)為30 000,訓(xùn)練批次大小為32.訓(xùn)練樣本數(shù)為4 000個,時長為1 600 s.考慮到三、四、五級海況周期不同,測試樣本數(shù)分別為100、150和200個,測試時長則分別為40、60、80 s.
2.1 輸入步數(shù)影響分析
基于波高輸入數(shù)據(jù)的LSTM模型,采用三、四、五級海況波高和船舶橫搖角度數(shù)據(jù),分析輸入步數(shù)對模型預(yù)報精度的影響.預(yù)測間隔步數(shù)n為0,分別用50、100、200、300、400、500、600、700的輸入步數(shù)代入模型進行預(yù)測分析,結(jié)果列于表3.
由表3可知,隨著輸入步數(shù)增加,均方根誤差和最大絕對誤差呈現(xiàn)出先減小后增大的趨勢.對于三級海況,當輸入步數(shù)取600時有最好的預(yù)報精度,其預(yù)測值基本與真實值相吻合,圖3a)為三級海況輸入步數(shù)為50、200、400、600的結(jié)果比較.對于四級和五級海況,當輸入步數(shù)取500時有最好的預(yù)報精度,圖3b)~c)分別給出了四級和五級海況輸入步數(shù)為50、100、300、500的結(jié)果比較.上述比較結(jié)果表明,隨著輸入步數(shù)增加,LSTM神經(jīng)網(wǎng)絡(luò)能更有效捕捉數(shù)據(jù)規(guī)律特征;但輸入步數(shù)過大,會導(dǎo)致LSTM神經(jīng)網(wǎng)絡(luò)提取無用信息進行數(shù)據(jù)擬合,從而導(dǎo)致預(yù)測精度有所下降.此外,相比于四級和五級海況,三級海況下船舶橫搖角度較小,分析認為需要更長的輸入步數(shù)來挖掘波高與船舶橫搖數(shù)據(jù)間的內(nèi)在聯(lián)系.
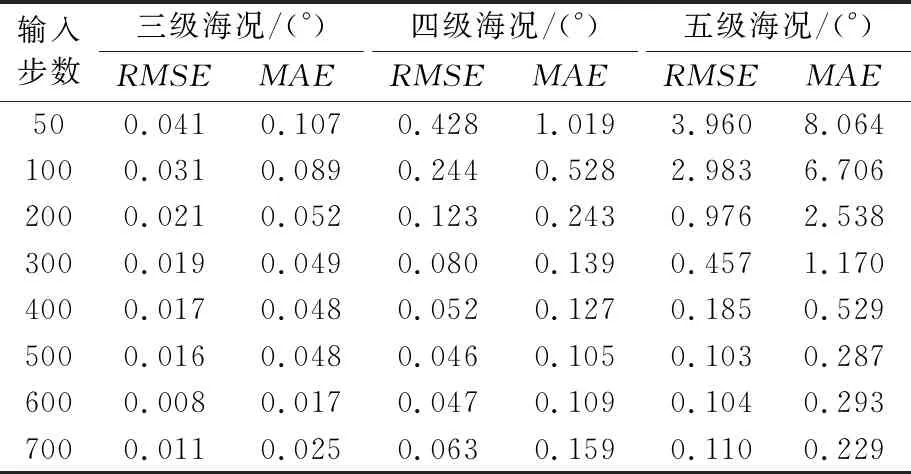
表3 不同輸入步數(shù)預(yù)報結(jié)果

圖3 不同輸入步數(shù)結(jié)果比較
2.2 兩種模型預(yù)報結(jié)果對比分析
選取三、四、五級海況波高和船舶橫搖角度作為研究數(shù)據(jù),對基于波高輸入數(shù)據(jù)的LSTM模型和基于橫搖輸入數(shù)據(jù)的LSTM模型在不同提前時長下的船舶橫搖預(yù)報精度進行比較分析.兩種模型采用相同的參數(shù)設(shè)置,三級海況輸入步數(shù)為600,四級和五級海況輸入步數(shù)為500.提前預(yù)報時長取2、4、6和8 s四種情況,所對應(yīng)的預(yù)測間隔步數(shù)(n)分別為5、10、15、20.
表4~5分別匯總了兩種模型得到的不同海況下船舶橫搖預(yù)報精度,圖4~7為船舶橫搖理論值和預(yù)測值的歷時對比.由表4~5可知:隨著提前預(yù)報時長的增加,兩種模型的預(yù)報精度都逐漸下降,這是因為隨著提前預(yù)報時長增大,時間序列數(shù)據(jù)之間的相關(guān)性減弱,使得預(yù)報精度降低.在三級海況下,基于波高輸入數(shù)據(jù)模型和基于橫搖輸入數(shù)據(jù)模型的均方根誤差接近;對于最大絕對誤差而言,當提前時長為6和8 s時,基于波高輸入數(shù)據(jù)模型預(yù)報精度分別提升了11%和49%.在四級海況下,基于波高輸入數(shù)據(jù)模型均方根誤差和最大絕對誤差均相比于基于橫搖輸入數(shù)據(jù)模型有所改善;當提前預(yù)報時長為6 s時,均方根誤差和最大絕對誤差分別下降了6%和7%;當提前預(yù)報時長為8 s時,均方根誤差和最大絕對誤差分別下降了19%和26%.在五級海況下,基于波高輸入數(shù)據(jù)模型的預(yù)報精度有更大的提升;當提前預(yù)報時長為6 s時,均方根誤差和最大絕對誤差分別下降了58%和46%;當提前時長為8 s時,均方根誤差降和最大絕對誤差分別下降了44%和46%.
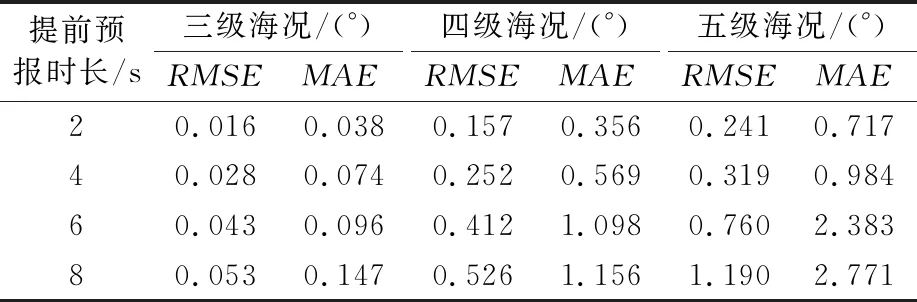
表4 不同提前預(yù)報時長預(yù)報結(jié)果(基于波高輸入數(shù)據(jù))
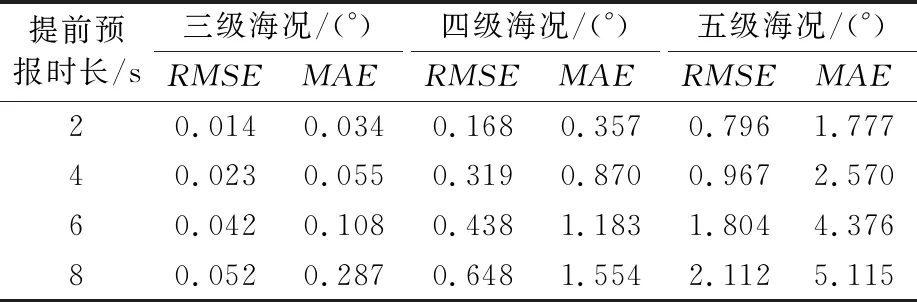
表5 不同提前預(yù)報時長預(yù)報結(jié)果(基于橫搖輸入數(shù)據(jù))
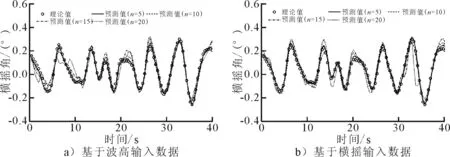
圖4 三級海況不同提前預(yù)報時長結(jié)果
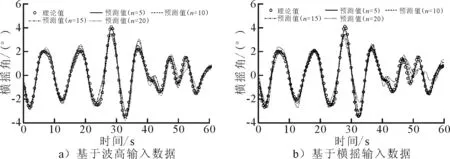
圖5 四級海況不同提前預(yù)報時長結(jié)果
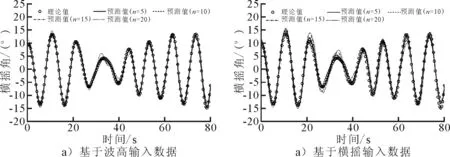
圖6 五級海況不同提前預(yù)報時長結(jié)果
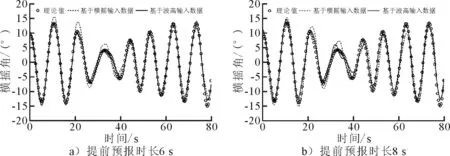
圖7 五級海況下兩種模型結(jié)果對比圖
總體而言,基于波高輸入數(shù)據(jù)模型預(yù)報精度整體比基于橫搖輸入數(shù)據(jù)模型要好.分析認為基于橫搖輸入數(shù)據(jù)模型是通過挖掘自身數(shù)據(jù)規(guī)律特征進行預(yù)報,當樣本量不夠龐大時峰值點特征難以訓(xùn)練得到,進行峰值預(yù)報時結(jié)果往往不夠準確.波浪是船舶搖蕩運動的激勵因素,基于波高輸入數(shù)據(jù)模型是通過挖掘波高與船舶運動之間的響應(yīng)關(guān)系,分別以波高和船舶橫搖作為輸入和輸出,理論上能更有效地預(yù)報船舶橫搖運動,故橫搖角峰值點預(yù)報更加準確.此外,隨著海況提高,波浪增大,波高與船舶運動之間有更強的響應(yīng)關(guān)系,故在高海況下利用波高與船舶橫搖角進行映射訓(xùn)練,能取得更好的預(yù)報結(jié)果.
3 結(jié) 論
1) 模型預(yù)報精度總體上隨輸入步數(shù)增加而提高,但當輸入步數(shù)增加到一定值時,分析認為由于過擬合問題會使模型預(yù)報精度有所下降.
2) 對于不同提前時長預(yù)報,兩種模型都呈現(xiàn)出隨提前時長增加而預(yù)報精度下降的趨勢,但隨著海況的提高,在相同提前時長條件下,基于波高輸入數(shù)據(jù)的LSTM模型能得到精度更高的結(jié)果.當提前預(yù)報時長為6和8 s時,與基于橫搖輸入數(shù)據(jù)的模型相比,基于波高輸入數(shù)據(jù)模型在四級海況下預(yù)報精度可提高約5%和20%,而在五級海況下精度均可提高約50%.
由于本文通過線性勢流理論得到的研究數(shù)據(jù)與真實情況下的波浪和船舶運動數(shù)據(jù)的特征還存在一定差別,后續(xù)將采用更為真實的數(shù)據(jù)對本文方法有效性進行驗證.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
