
基于CEEMD和SVD的路面紋理與抗滑性能研究
2022-01-12 04:14:48彭慧婷咼潤華司有強
武漢理工大學學報(交通科學與工程版) 2021年6期
彭慧婷 咼潤華 徐 粒 司有強
(新疆大學建筑工程學院1) 烏魯木齊 830046) (清華大學土木工程系2) 北京 100084)
0 引 言
抗滑性能是衡量路面安全性能的主要評價指標.其測量方法主要是傳統(tǒng)的接觸式方法如擺式摩擦儀等.英國道路運輸研究所發(fā)明了擺式摩擦系數(shù)測定儀,最早是用于評價路面抗滑性能的切實可行的方法和標準.Fwa等[1]采用Abaqus模擬擺式摩擦儀測定過程,發(fā)現(xiàn)該數(shù)值模擬可以較好地模擬實際測量過程中摩擦塊滑移的長度、擺值的大小,與真實測試結(jié)果相吻合.隨著計算機技術(shù)的發(fā)展,非接觸式檢測技術(shù)逐漸發(fā)展起來,激光技術(shù)和相機拍照技術(shù)在路面上逐漸應(yīng)用起來.Zahouani等[2]應(yīng)用激光跟蹤聚焦方法測試了瀝青路面紋理形貌,提取出了路面微觀紋理形貌,但該方法僅用于二維形貌輪廓的測量.通過激光三角法原理設(shè)備可以對車轍深度、平整度以及宏觀紋理等重構(gòu)表面形貌[3].Fang等[4]采用矩陣實驗室算法對單顆集料圖像進行處理和傅里葉分析發(fā)現(xiàn)基于傅里葉函數(shù)的矩陣實驗室算法結(jié)果準確,并可用于表征集料的表面形態(tài)特征.
目前,常用的路面抗滑性能評價指標主要有基于摩擦系數(shù)指標(british pendulum number,BPN)、紋理分形維數(shù)(D)、平均構(gòu)造深度(mean texture depth,MTD)和平均斷面深度(mean profile depth,MPD)等.大量學者通過考察紋理指標與道路摩擦系數(shù)間的相關(guān)性,建立預測模型[5-6].Chou等[7]在現(xiàn)有的MPD和MTD的基礎(chǔ)上提出一種新的基于激光技術(shù)的評價指標(mean difference of elevation,MDE),MDE為測量長度上每兩個相鄰點間距固定的高差之和除以測量長度上的點個數(shù).Meegoda等[8]研究摩擦系數(shù)與MPD值間的關(guān)系,研究發(fā)現(xiàn)MPD值分布不同與摩擦系數(shù)具有正負相關(guān)性,在此基礎(chǔ)上研究紋理構(gòu)造深度與胎路接觸面積,水膜厚度等與摩擦系數(shù)間的關(guān)系.周興林等[9]基于分形理論,研究不同磨光狀態(tài)下路面紋理的分形特征,提出截止波長概念作為評價普通磨光和差異磨光的指標,水平截止波長表示平均微凸體尺寸,垂直截止波長表示骨料的平均高度,應(yīng)用三維激光掃描儀,提取不同磨光紋理信息.楊國峰等[10]用多功能路況快速檢測系統(tǒng)(CiCs)采集路面構(gòu)造深度信息,計算路面磨耗率,對比分析無路面磨耗與有磨耗路面的MTD與MPD值,建立路面磨耗與路面紋理的平均構(gòu)造深度之間的評價模型,并擬將該模型應(yīng)用于紋理評價指標標準中.Rado等[11-12]提出利用希爾伯特-黃變換對二維紋理信號進行處理,通過希爾伯特變換得到聯(lián)合固有模態(tài)函數(shù)BIMF的瞬時頻率和瞬時振幅,提取峰值包絡(luò)線并求均值研究與摩擦系數(shù)間的相關(guān)性.
文中通過三維激光斷面儀獲取不同車轍板樣本的表面信息,針對表面高程數(shù)據(jù)特點引入了一種新的路面紋理采集濾波方法,提出了新的抗滑評定指標σi(紋理抗滑參數(shù)),該指標與擺值BPN呈現(xiàn)良好的相關(guān)性,可作為未來非接觸式抗滑評定參考.
1 基本原理
1.1 三維激光斷面儀工作原理
三維激光斷面儀見圖1.該設(shè)備由高速三維相機、線激光發(fā)射器、軸編碼器DMI、千兆網(wǎng)信號傳輸線、控制中心組成,脈沖激光以線形呈現(xiàn)在靶材上,長270 mm,相機調(diào)查寬度為2 048 mm,意味著激光分散到像素點間距為0.12 mm.其總體布置架構(gòu)見圖2,通過高速3D相機捕捉激光線,隨著靶材高度變化,表面激光亮條紋在相機網(wǎng)格陣中與原來的位置發(fā)生相對移動,激光條紋與背景存在明顯強度差,采用門限處理將其與背景進行二值化,通過重心算法[13](獲取激光條紋中心)和數(shù)字圖像濾波技術(shù)計算出每個目標點與預設(shè)零位面之間的距離,從而得到線激光掃描過的道面三維高程信息.

圖1 三維激光斷面儀
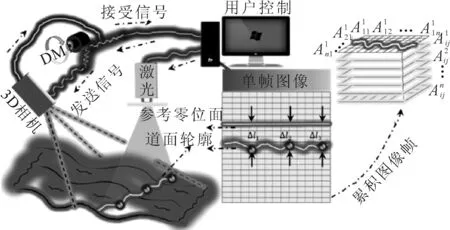
圖2 三維激光斷面儀架構(gòu)示意圖
在實際的采集過程中,高速3D相機圖像幀采集模式分為靜態(tài)模式和距離觸發(fā)模式,靜態(tài)模式由控制中心發(fā)出采集信號,該模式通常在室內(nèi)模擬不同速度采集狀況,距離觸發(fā)模式由數(shù)字軸編碼器DMI(固定于車輪軸)觸發(fā)采集信號.
1.2 CEEMD原理
激光掃描儀采集的三維紋理數(shù)據(jù)包含了豐富的表面高程信息.它由300列二維非線性非平穩(wěn)信號組成,包括各種噪聲干擾和多頻混合信號.對于這種類型的數(shù)據(jù)處理,Huang等[14-15]提出EMD(empirical mode decomposition)算法,將原始信號s(t)分解為n個固有模態(tài)函數(shù)IMF和一個余項.
(1)
式中:IMFi(t)為固有模態(tài)函數(shù);rn(t)為余項.
由于EMD算法存在嚴重的模態(tài)混疊現(xiàn)象,對原始信號的重構(gòu)較差,因此Wu等[16]提出改進的EEMD算法(ensemble empirical mode decomposition).EEMD通過向原始信號中不斷添加高斯白噪聲消除EMD存在的模態(tài)混疊現(xiàn)象,
(2)
式中:N為添加的白噪聲個數(shù);Ci,j(t)為添加第j個白噪聲處理后第i個IMF.EEMD由于添加白噪聲,在信號處理過程中不能完全的消除,影響信號的純度.
補充集合經(jīng)驗?zāi)B(tài)分解(CEEMD)[17]是一種基于EEMD的優(yōu)化算法,能夠有效克服模態(tài)混疊和白噪聲干擾,并對信號實現(xiàn)精確地重構(gòu).主要通過在原信號中加入N個正、負輔助白噪聲,得到2N個信號,對每個信號進行EMD分解,最后將計算結(jié)果進行組合.CEEMD過程與EEMD相同,不同之處在于在添加噪聲之后添加相反符號的噪聲,按照EMD分解得到IMFs.
1.3 奇異值分解原理
奇異值分解(SVD)是一種重要的矩陣分解方法.實際生活中,大多數(shù)矩陣都不是方陣,特征值分解一般只適用于方陣,而奇異值分解可以應(yīng)用于任何矩陣的分解.奇異值分解是主成分分析的主要步驟,通過提取主成分將復雜的大數(shù)據(jù)矩陣簡化為低維數(shù)據(jù)矩陣.假設(shè)C為m×n階矩陣.
C=UΣVT
(3)
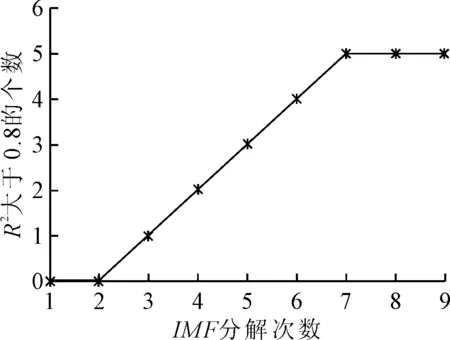
式中:U為m×m階酉矩陣;Σ為半正定m×n階對角矩陣;VT為V的轉(zhuǎn)置矩陣,是n×n階酉矩陣.這樣的分解就稱作C的奇異值分解.Σ對角線上的元素δi即為C的奇異值.通常分解后的奇異值按照由大到小的順序排列,δ1>δ2>δ3>…>δi(1 在熱拌瀝青(HMA)試塊表面共選取了8個300 mm×300 mm的試驗區(qū)域,利用激光線勻速掃描測試表面,三維紋理中的任一界面高程曲線見圖3a),運動過程中獲得的累積圖像幀見圖3b),該過程將獲取測試區(qū)域的原始紋理信息.其次為了與英國擺式摩擦儀的測試區(qū)域相同,取中心面積為100 mm×100 mm的中心區(qū)域作為測試對象,激光傳感器采集到的相應(yīng)數(shù)據(jù)為800×300矩陣,實際操作過程中獲取得到的原始高程信息還包含有噪聲值(利群異常值),因此將原始數(shù)據(jù)通過上述CEEMD原理進行濾波處理,并對其表面高程數(shù)據(jù)進行三維重構(gòu)得到圖3c)效果,依次將所有樣本表面100×100數(shù)據(jù)進行奇異值分解得到σi.最后采用英國擺式摩擦儀測量了表面的抗滑性見圖3d),并記錄了5次擺測值及其平均值,擺值的大小根據(jù)溫度變化進行了修正. 圖3 實驗采集流程 將300列原始數(shù)據(jù)中的每一列二維原始信號進行CEEMD分解,在圖4中,將固有模態(tài)函數(shù)個數(shù)設(shè)置為8,分解后得到9個IMFs和一個余項Rs10,其中IMF1為原始信號,IMF2~IMF9分別為原信號的單一模態(tài)分解函數(shù).其次把各IMF按照頻率由大到小依次排列,高頻部分包含部分微觀和宏觀紋理信息.IMF6及以上為低頻信號,具有大量紋理信息,余項代表信號變化趨勢和信號分解的穩(wěn)定程度.將原始信號和余項去掉,對IMF2~IMF9組成的800×8矩陣利用式(4)進行奇異值分解,得到奇異值矩陣Σ800×8,并提取每一列的非零奇異值向量,見圖4. 圖4 CEEMD分解IMF函數(shù)及余項 (4) 接著將300原始數(shù)據(jù)中每列的奇異值分別求和式(5),式中σij為300列原始數(shù)據(jù)的第j列經(jīng)奇異值分解的第i行奇異值;σi為300列數(shù)據(jù)第i行奇異值的總和. (5) 此次試驗中,對每個試件的300列二維信號進行CEEMD分解.一個800×8矩陣由8個IMF組成,用于奇異值分解,每次分解后提取并累積奇異值.表1為基于八組測試區(qū)域數(shù)據(jù)的回歸分析,并與通過擺式摩擦儀測量的擺值進行線性擬合.結(jié)果表明σ1~σ5與路面摩擦系數(shù)R2擬合優(yōu)度大于0.8,具有良好的線性相關(guān)性;σ6~σ8的R2擬合優(yōu)度小于0.6,擬合較差.其中σ3與擺值的R2擬合優(yōu)度最高為0.877,擬合直線如圖5. 表1 σi和BPN的相關(guān)性 圖5 σ3與BPN線性擬合方程 擬合方程為 y=0.007 8x+34 (6) 為了進一步驗證σi參數(shù)的可靠性,對采集數(shù)據(jù)進行了輪廓算術(shù)平均偏差Ra的計算,來驗證σi與抗滑性能的相關(guān)性.Ra為輪廓偏差絕對值在采樣范圍內(nèi)的算術(shù)平均值.從統(tǒng)計學意義上講,它是以路面表面紋理高程形貌大小分布取其平均,反映了地形的輪廓振值相對于基準線的離散程度,被廣泛用于評價表面形貌特征的粗糙程度.其計算式為 (7) 式中:z(x,y)為基于基準線的形貌高程數(shù)據(jù);M,N為相互垂直的兩個方向上的采樣點數(shù). 通過對三維紋理數(shù)據(jù)進行計算,并與測量的擺值和σi進行線性擬合.在表2中,可以明顯的觀察到,σ1~σ5與輪廓算術(shù)平均偏差Ra擬合優(yōu)度超過0.9,具有非常良好的線性相關(guān)性,其中σ1達到最高的相關(guān)性為0.944;而σ6~σ8的R2擬合較差.最后,Ra與BPN的擬合優(yōu)度為0.772.其擬合直線見圖6,式(8)~式(9)分別為σ1與Ra、BPN與Ra的線性擬合方程 圖6 σi、BPN與Ra線性擬合方程 表2 σi、BPN和Ra的相關(guān)性 Yσ1=0.69x-0.11 (8) YBPN=0.26x+0.33 (9) 起初,將CEEMD分解時設(shè)定分解個數(shù)為8.由圖7可知,當分解個數(shù)大于8時,IMF9與IMF10函數(shù)變化趨勢一致,只是分解頻率降低;當分解個數(shù)小于8時,原始信號分解不充分,無法完全提取原始信號的特征信息.當改變固有模態(tài)函數(shù)IMF分解個數(shù)時,即當IMF個數(shù)大于8時,分解后的σi與擺值的擬合度在i≤5時具有良好的相關(guān)性,與IMF等于8時相同;當IMF個數(shù)設(shè)置小于8時,每次分解的最后兩項σx(i-2≤x≤i)與擺值的擬合度較差,而σx(x≤i-2)與擺值的擬合度均大于0.8.由此說明當IMF分解個數(shù)大于8時,σ1~σ5對于不同個數(shù)IMF與紋理摩擦值都具有良好的相關(guān)性;當IMF分解個數(shù)小于8時,σi與擺值的擬合度大于0.8的個數(shù)逐漸減少. 圖7 R2大于0.8的個數(shù)與IMF分解次數(shù)的對比 綜上所述,路面紋理信號具有復雜性,線激光傳感器可以從空間域直接采集紋理信息.在本研究中,將復雜的原始信號,利用CEEMD和SVD分解為單一模態(tài)函數(shù)和奇異值向量.通過對奇異值求和,得到紋理抗滑參數(shù)σi,并發(fā)現(xiàn)其與路面摩擦值具有很好的相關(guān)性.通過底部非接觸式紋理采集模塊收集豐富的路面三維紋理信息,通過計算σi可以快速獲得抗滑性能指標. 1) 通過三維激光構(gòu)造儀獲取車轍板二維和三維紋理信息,通過CEEMD算法對二維原始信號進行分解得到800×10的矩陣;將IMF1和RS10去掉,對800×8的矩陣進行奇異值分解得到信號的特征值向量σij并對其求和得到σi. 2) 分別對σi與擺值進行線性擬合,σ1~σ5具有良好的相關(guān)性,擬合優(yōu)度大于0.8.當IMF分解個數(shù)大于8時,σ1~σ5對于不同個數(shù)IMF與紋理摩擦值都具有良好的相關(guān)性.當IMF分解個數(shù)小于8時,σi與擺值的擬合度大于0.8的個數(shù)逐漸減少. 隨著道路檢測養(yǎng)護管理的發(fā)展,快速檢測評價技術(shù)越來越重要.通過對σi與摩擦系數(shù)間的相關(guān)性分析,可以快速高效的為交通基礎(chǔ)設(shè)施管理平臺提供數(shù)據(jù)支持,為我國網(wǎng)級路面管理決策平臺建設(shè)提供技術(shù)支持.2 實驗方法
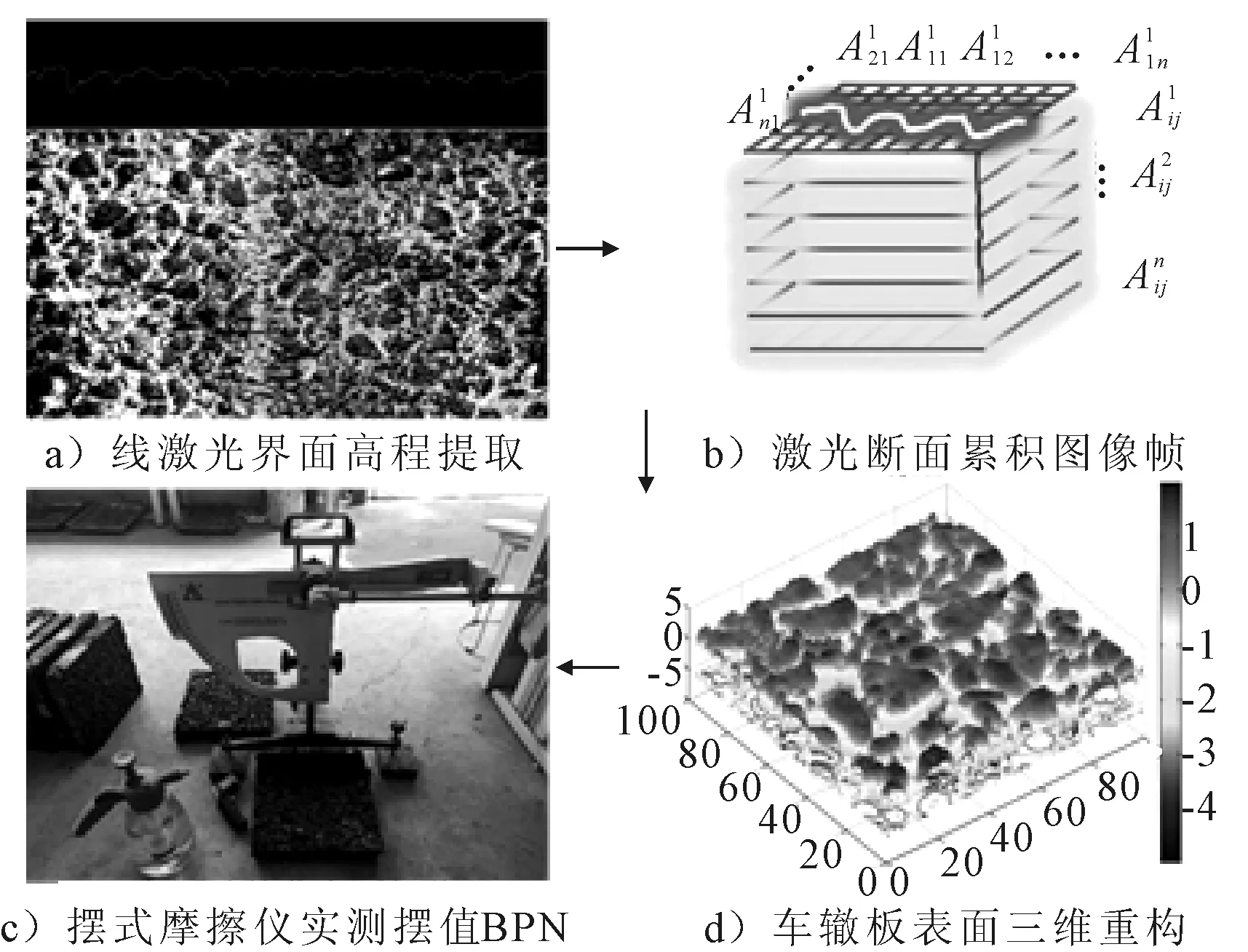
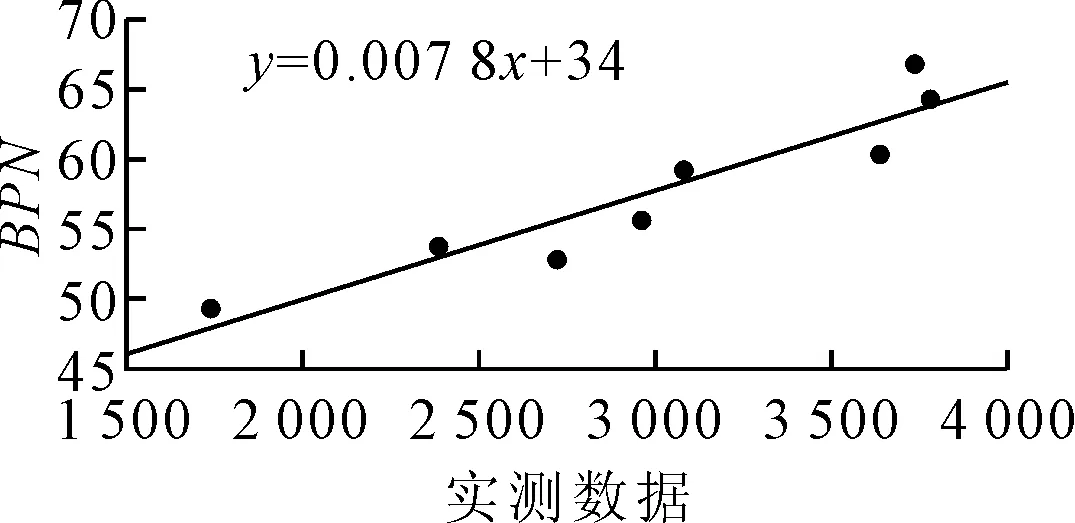
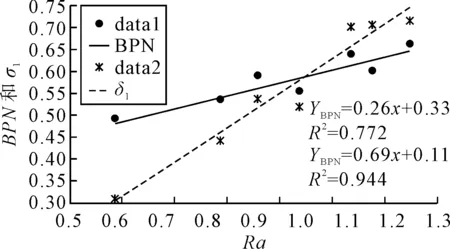
3 數(shù)據(jù)處理與討論




4 結(jié) 論
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經(jīng)濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
