基于城市軌道交通無人駕駛技術的站臺門系統與信號系統接口設計與測試
2022-01-12 04:04:44李景虎
城市軌道交通研究 2021年12期
李景虎
(上海申通地鐵集團有限公司,201103,上海∥高級工程師)
城市軌道交通無人駕駛技術發展迅速,其信號系統采用CBTC(基于通信的列車控制)或ATC(列車自動控制)系統。為滿足全自動駕駛要求,對站臺門系統的可靠性、安全性及可維護性要求越來越高。目前,信號系統和站臺門系統的控制方式由通過硬線的電平信號控制逐步向硬線信號和通信信號相結合控制升級轉變。從安全性角度考慮,接口也按關鍵信號和非關鍵信號進行相應劃分,且關鍵信號接口必須滿足SIL4(安全性等級4)的要求。
以海外地鐵設計為例,站臺門與信號系統的接口信號通常包括關鍵信號和非關鍵信號。其中,關鍵信號包括DEC(門使能信號)與安全回路信號,非關鍵信號包括 DOC(開門信號)和滑動門單元的網絡信號。站臺門中央控制柜(PCC)負責整個車站站臺門控制和監視信號的傳輸。因此,本文需要深入研究關鍵信號的安全設計,以及非關鍵信號的可靠性設計和測試驗證。
1 信號系統與站臺門系統接口
信號系統與站臺門系統的關鍵信號接口主要負責傳輸DEC和安全回路信號,就安全性保證來說,站臺門DEC設計主要滿足防止意外開門的需求,站臺門安全回路信號設計主要滿足防止列車與站臺門之間夾人夾物的需求。
DEC為控制站臺門開門和關門的前提條件,以側為單位,其采用繼電器控制信號通過硬線發出控制允許信號。該信號通常來源于列車占軌等列車在站檢測信號。只有收到控制允許信號的情況下,才允許站臺門開啟;否則,乘客將有跌落軌道或進入軌行區的安全風險。該信號通常用作站臺門門鎖解鎖或電機得電的前提條件。
安全回路信號包括滑動門(PDM)和靜態門(PEE(應急門)+PFP(端門))的關閉鎖緊信號,由整側門體的關閉鎖緊信號串聯而成。只有確保所有站臺門均已關閉、鎖緊信號有效,且無人員進入軌行區時,才能導通安全回路、發出站臺門安全回路信號,進而允許列車發車;否則,會有夾人夾物的事故發生。
關鍵信號接口的設計必須滿足SIL4要求。列車信號接口示意圖如圖1所示。其中,PDM信號中既有DEC信號也有安全回路信號,而靜態門信號僅有安全回路信號。相應的,安全回路需分為滑動門安全回路和靜態門安全回路,并獨立設置接口。
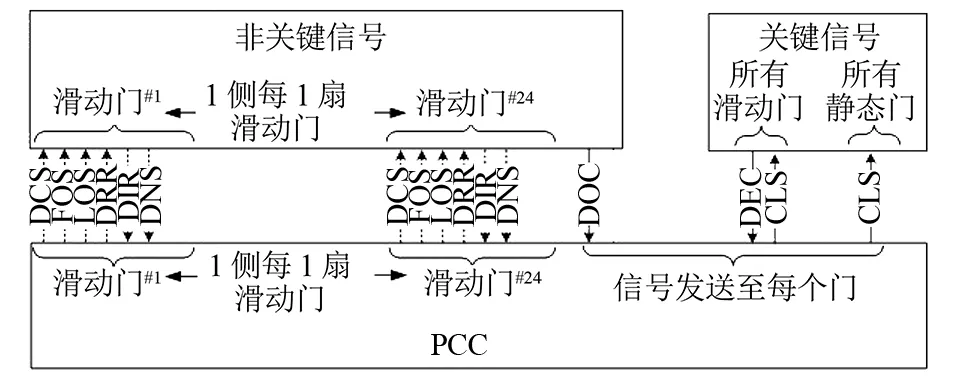
圖1 信號接口示意圖
非關鍵信號包含與門控制相關的DOC(開門信號)和門狀態相關的反饋信號。DOC也為通過硬線傳輸的電平信號,用以控制站臺門的打開和關閉。當DOC為1時,滑動門打開,當DOC為0時,滑動門關閉。這一設計應用廣泛,其安全性等級可達到SIL2以上。其他非關鍵信號可通過信號系統與站臺門系統之間的網絡接口實現交互,用于狀態監視和故障診斷。接口信號見表1。需注意的是, PCC機柜同時監測兩側站臺。
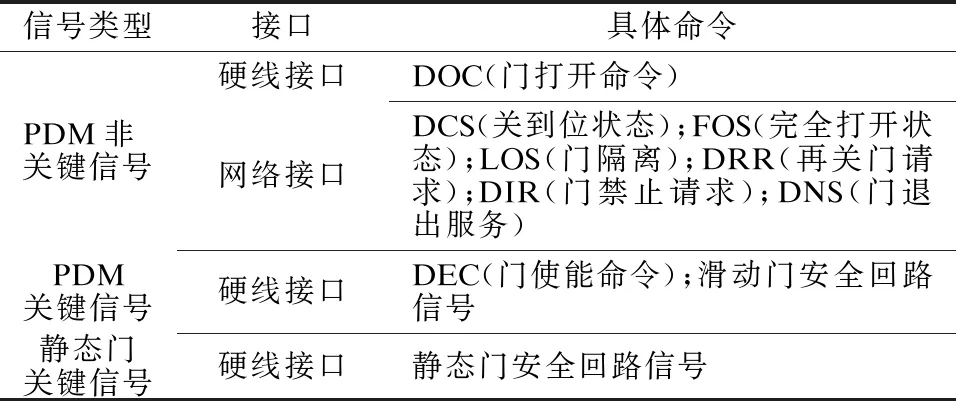
表1 接口信號列表
站臺門系統在每站配備1臺PCC機柜用于與信號系統接口。CBTC或ATC與站臺門系統的交互包含表1中的所有信號。為了縮短接口路由,通常建議PCC機柜、OCS機柜及CLP機柜設于站臺設備房內,既能減少控制信號的壓降,又能通過通信路由來保證通信數據的可靠性。標準接口接線數量為:對于網絡信號,需在站臺共配置2根網線(1根為冗余線);對于通過硬線傳輸的非關鍵信號DOC,需在每側站臺設置1根2-硬線;在通過硬線傳輸的關鍵信號中,需在每側站臺設置1根4-硬線用于DEC傳輸,需在每側站臺設置2根4-硬線用于安全回路信號傳輸。
2 接口的設計與測試
2.1 接口電路設計
2.1.1 關鍵信號接口電路
圖2為每側站臺的站臺門與信號系統接口電路原理圖。由圖2可知,雙方采用“誰使用誰供電”原則;站臺門系統為DEC的接收方,對DEC信號回路供電;當DEC為高電平(常開觸點保持閉合)時,CBTC系統的繼電器通電。DEC是與站臺門解鎖相關聯的安全互鎖命令,被視為對安全至關重要的信號,通過故障導向安全的設計和設備來實現。DEC通過雙切電路,繼電器雙段及觸點串聯電路,保證任何單點故障不會導致信號誤觸發;其采用高可靠性的2路繼電器電路可保證電路功能的可靠性。CBTC或ATC系統負責控制來自2個獨立繼電器的2對無源觸點(圖2中使能觸點):當CBTC或ATC系統使能信號繼電器得電時,站臺門控制使能信號繼電器正負供電回路導通,使能繼電器得電,允許站臺門開門;站臺門命令控制信號應為1個持續的電平信號;當站臺門檢測到障礙物時,站臺門必須打開。在站臺門打開過程中及保持打開狀態的時間段內,DEC應始終保持直至站臺門打開到位。
在允許列車駛離站臺之前,CBTC或ATC系統評估的安全標準之一是確認該側站臺PSD(站臺門)系統的所有滑動門和靜態門均已關閉并鎖定。為此,站臺門系統將負責在每側站臺向CBTC系統或ATC系統提供CLS-AD(關閉鎖緊信號-滑動門)及CLS-SD(關閉鎖緊信號-固定門):當滑動門關閉并鎖定(常開觸點保持關閉)時,PSD繼電器通電;當靜態門關閉和鎖定(常開觸點保持關閉)時,PSD繼電器通電。該電路借鑒雙切回路設計,基于收發回路雙段的原理,實現了電路的安全性和可靠性。
DEC和安全回路信號為行車安全的關鍵信號,必須僅通過安全導向的設計來開發,并通過安全導向的設備來實施。為了有效地實現接口的安全性, CBTC或ATC系統與站臺門系統之間交互的信號應為持續信號,并可被雙重切斷。 站臺門系統的每個4線安全回路信號(上、下行滑動門和靜態門安全回路)傳輸均通過2個獨立繼電器。且每個繼電器均具有1個常開無源觸點和1個常閉無源觸點(見圖2)。CLS-AD和CLS-SD信號均通過已定義的方波編碼進行傳輸收發,而不再僅僅是1個電平信號。采用方波編碼傳輸可避免因信號或接口的不穩定而導致的誤觸發情況。考慮不同的故障模式,方波編碼傳輸方式通過雙切回路方波來收發數據組編,以判斷信號是否異常。
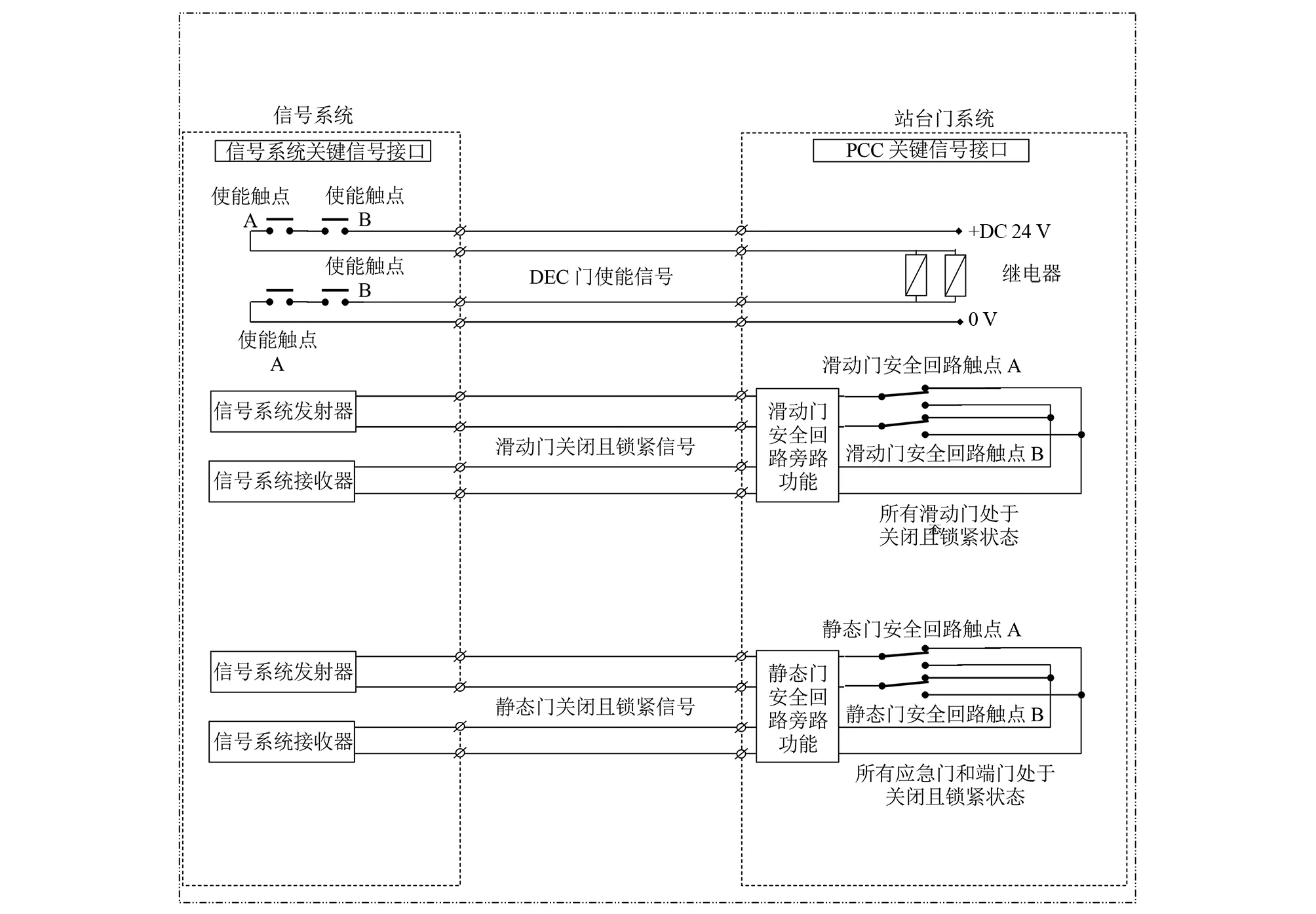
圖2 關鍵信號接口電路圖
如圖3所示,根據方波收發現象,可進行故障檢測判斷:當2路安全回路導通時,信號接收方波與信號發射方波一致;當兩路安全回路斷開時,信號接收方波與信號發射方波呈互斥方波;當安全回路繼電器信號出現開路時,方波發射器和方波接收器均無法正常收發數據;當安全回路繼電器出現觸點短路時,方波發射器能進行數據發送,但方波接收器無法接收方波數據。
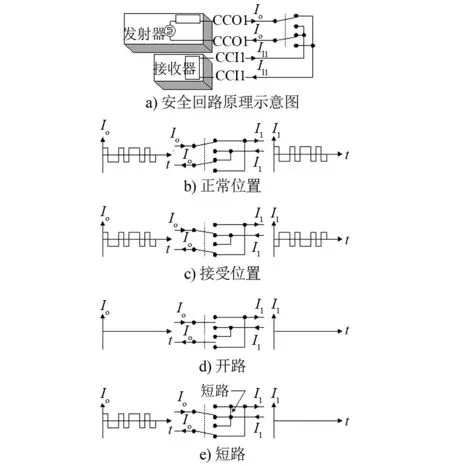
圖3 安全回路信號
2.1.2 非關鍵信號接口電路
圖4為單側站臺站臺門與信號系統的非關鍵信號接口原理圖。
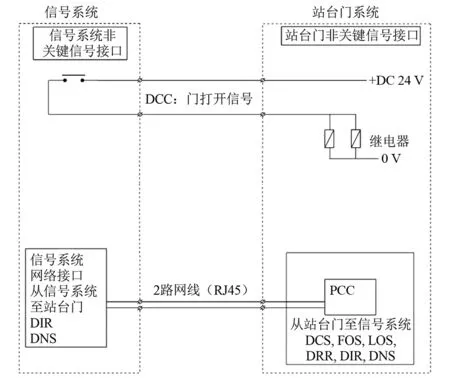
圖4 非關鍵信號接口電路圖
為了控制站臺門的開啟,CBTC或ATC系統對每個站臺發出非關鍵公共信號DOC。該信號不是安全信號,而僅是功能信號。 CBTC或ATC系統通過1個無電壓觸點來實現對DOC的傳輸(見圖4)。當DOC為高電平時,將執行開門動作。其余非關鍵信號可依據Modbus TCP/IP協議進行網絡傳輸,這些非關鍵信號由每個滑動門單元的控制器監測,并通過現場總線將與PCC進行信息交互反饋;PCC將信息轉化后與信號系統交互。非關鍵信號的功能描述如表2所示。
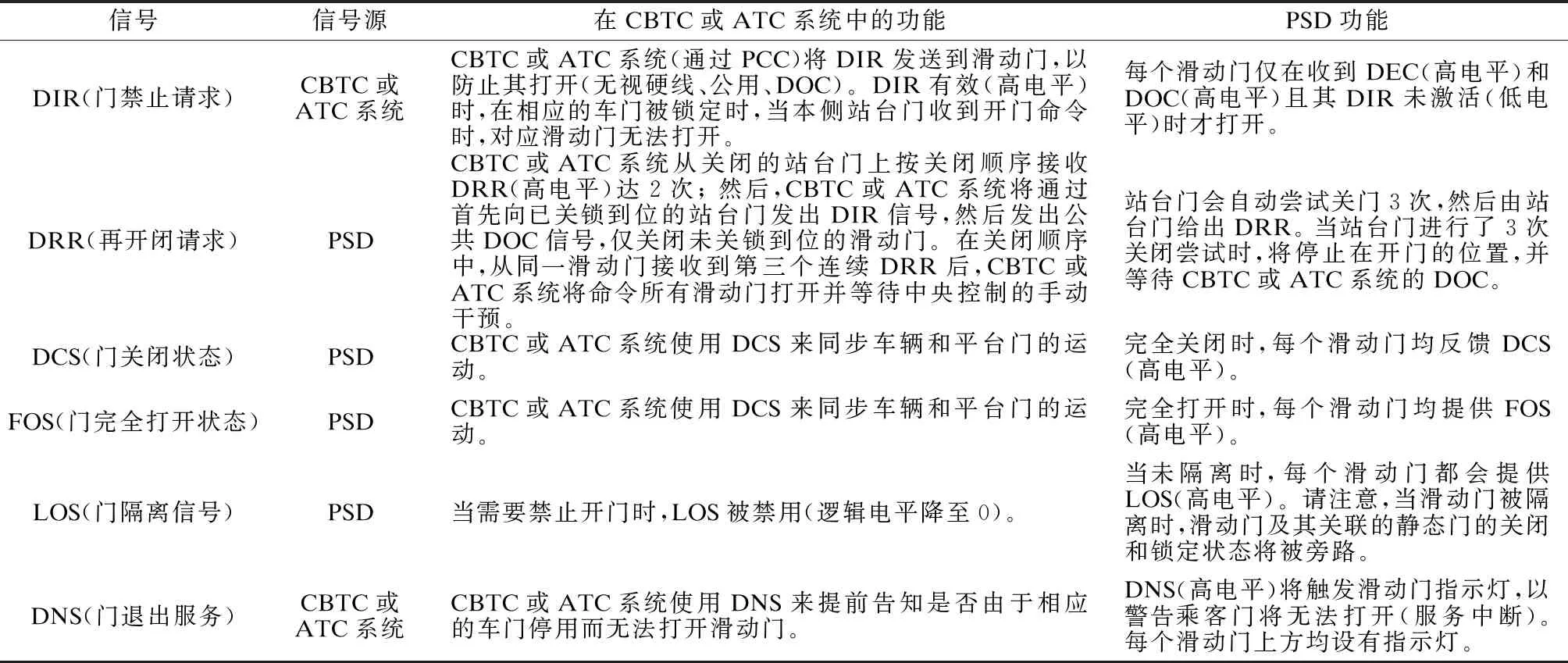
表2 非關鍵信號的功能描述
根據線路全自動駕駛場景分析,站臺門與列車門的聯動也是避免出現安全事故的關鍵方向之一。
在列車門與站臺門的開關門控制中,均需考慮如何避免乘客意外進入軌行區。DIR和LOS即為“對位隔離”信號的依據。
在全自動駕駛線路UTO(無人值守的無人駕駛)模式及ATO(列車自動運行)模式下,站臺門與列車門均具備“對位隔離”功能:信號系統向站臺門系統實時報告列車門的相關隔離信息,站臺門系統也向信號系統實時發送站臺門隔離信息。當列車門發生故障時,列車門被隔離,信號系統將故障門的隔離信息發送給站臺門系統,站臺門對應的滑動門不打開;當站臺門發生故障時,對應的列車門也不打開,從而實現“對位隔離”。在交互的信息中,需包含門號地址和隔離信息,以實現門號定位和控制。
站臺門系統設計中,LOS為站臺門的隔離發出信號。當站臺門被隔離時, LOS為1,站臺門控制器將LOS通過現場總線反饋至中央控制盤的PCC監控主機,并由PCC實現與信號系統之間的通信交互。當列車門被隔離時,DIR為1,站臺門系統收到DIR為1的信號后,主動將對應滑動門進行軟隔離,禁止門打開。同理,列車門也將DIR和LOS作為對位隔離功能的判斷和執行條件。
2.2 接口的測試實施細則
在測試DEC及DOC等硬線信號時, 先由CBTC或ATC系統發出相應信號,再通過檢測PSD繼電器線圈兩端電壓,來驗證該信號是否有效傳輸至站臺門系統。當檢測到繼電器線圈兩端電壓持續為DC 24 V左右時,可判斷信號系統使能或開門信號有效;當繼電器線圈兩端電壓為0時,判斷信號系統使能或開門信號未發出;當繼電器線圈兩端電壓低于DC 24V時,判斷信號系統發出了控制信號,但可能存在壓降或電壓偏低的情況。通常,繼電器線圈兩端電壓只有接收信號繼電器的工作電壓范圍內,方能判斷信號為有效信號。
故障模擬:在測試時,通過模擬接口任何1個單點故障(如使能繼電器A觸點強制斷開),來檢測接口電路是否有效。
基于接口電路硬件設計原理,在測試CLS-AD及CLS-SD時,接口設備均為繼電器接口,故通過檢測繼電接口電壓來判斷信號是否有效。基于安全回路監測通過方波收發原理,根據設計原則,參照圖3進行故障模擬導向測試。CLS-AD及CLS-SD的信號有效性判斷如表3所示。
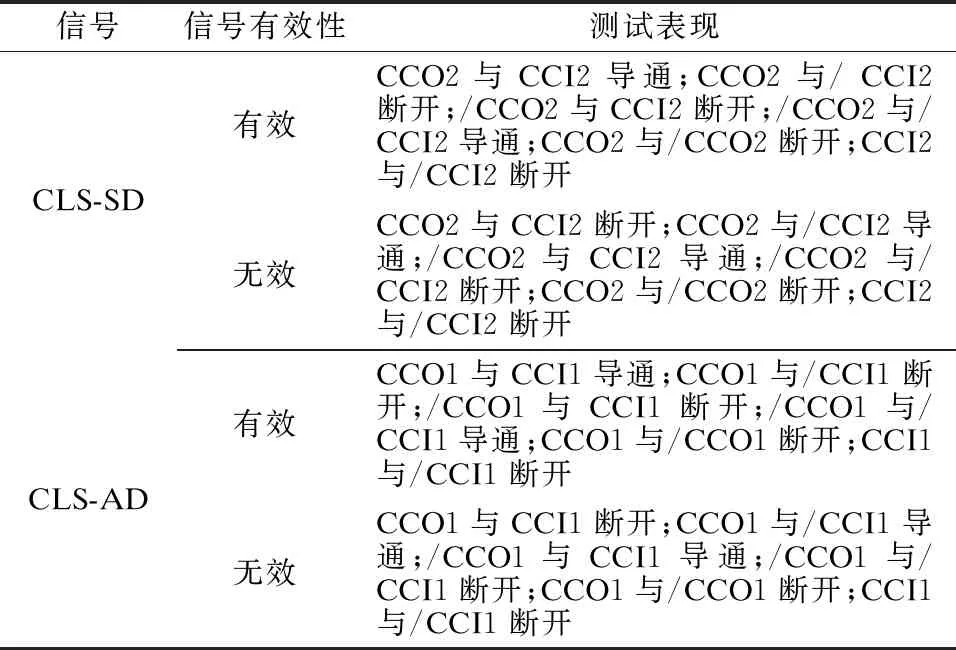
表3 滑動門安全回路及靜態門安全回路的信號有效性判斷
對于網絡信號,根據Modbus TCP/IP 協議,本研究利用調試軟件進行測試。通過模擬站臺門的狀態,檢查CBTC或ATC系統相應的寄存器點位是否被賦值;在信號系統接收端,通過對收發數據的監聽,驗證數據通信是否正常、數據內容是否正確;反之,通過CBTC或ATC系統發出的命令,檢查站臺門系統相應寄存器點位的值是否正確跳變。
3 結語
在未來,站臺門系統與信號系統的信息交互一定會日趨可靠、穩定,站臺門與車輛之間的信息交互將會更加密切。本研究為了更好地滿足智慧城軌、智慧站臺的需求,適用于智慧站臺信號系統和站臺門系統之間接口設計及測試方法,在全自動駕駛線路的應用上提高功能的安全性和可靠性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25