一種基于錄波啟動信息的電網故障診斷特征向量中心性方法
2022-01-17 06:58:18廖小君馮先正王曉茹
四川電力技術 2021年6期
廖小君,馮先正 ,張 里 ,王曉茹
(1.西南交通大學電氣工程學院,四川 成都 610065;2.四川電力職業技術學院(國網四川省電力公司技能培訓中心),四川 成都 610072)
0 引 言
隨著大數據和人工智能技術的發展和應用,基于故障錄波信息的智能分析和診斷也在不斷研究中,從基于故障錄波時序網[1]、廣域錄波[2]的診斷系統發展到多數據源融合的故障信息診斷[3-4]。人工智能技術融合的智能錄波信息診斷系統[5]也成為熱點。目前,基于故障錄波信息的診斷系統主要通過繼電保護及故障信息管理主站進行采集[6],將故障時候相關的故障錄波器和保護裝置的錄波通過故障信息子站上送。由于錄波文件往往比較大,所以實際故障信息上送優先是保護裝置動作報文和裝置啟動報文等文本信息,然后再對故障錄波波形文件整理后上傳。上傳一般主動上送有保護元件動作的裝置錄波,其余的錄波信息則通過召喚獲取。基于廣域和多源融合的故障錄波智能分析還需進一步整理錄波文件,然后進行數據預處理[2,4],根據錄波進行智能分析,最終確認故障點。這個過程處理時間較長。如何能夠縮短診斷時間,利用一些能夠快速獲得的錄波信息對故障進行快速判斷識別,以初步掌握電網故障情況,為后續有重點地收集錄波數據進行故障分析和校核,提高智能錄波分析效率是非常必要的。
目前,故障錄波信息中,除了故障元件的動作信息外,能夠快速獲得的是其他故障信息,主要是非故障元件的啟動信息。啟動報告信息除了啟動時間和啟動元件類型,往往還包括啟動值(相當于啟動靈敏度),一些保護設備和故障錄波器的啟動報告信息沒有啟動值,通過裝置升級,也很容易獲得啟動值。由于啟動值反映了電網各節點和支路對于故障感知的大小,因此通過對啟動信息中的啟動值進行分析,能夠提供許多有價值的信息,尤其是故障發生最初時刻的一些有用的信息,如故障發生時刻、故障嚴重程度、故障相別、故障元件等。由于故障啟動信息上送和保護動作信息上送都是采用報文上送,所以速度很快[7]。電網故障感知與分析的全景錄波平臺為錄波協控[9]提供了平臺支撐,能實現基于故障錄波啟動信息的快速診斷,還可實現對啟動元件的性能評價[8]。
電網的智能診斷方法主要有專家系統、貝葉斯網絡、佩特里網和神經網絡等主要方法[10],但上述方法基于開關量和相互邏輯關系,依賴先驗概率等,因此僅基于啟動信息的診斷分析不適合采用上述方法。直接對故障啟動信息,通過如聚類等方法比直接進行統計分析更好。但對于一些與網絡結構緊密的數據集,將其轉換為一個加權圖,并將圖中心性作為評價網絡節點重要性的指標,效果將更顯著[11]。由于電網故障特征分布與電網結構緊密相關,因此將故障啟動信息建模為一個加權圖,利用節點重要度(可獲得圖中心性)分析方法進行故障網絡變化和故障元件診斷分析,能夠獲得更好的效果。
利用圖的節點重要度在電網的安全評估、連鎖故障診斷等方面有重要應用[12]。但電網中的節點重要度主要根據節點在輸電網絡中的功能對節點進行分類,不同類型節點以不同指標各自評估其重要性,不適合故障網絡的節點重要度評估。圖節點重要度方法很多,包含4大類30種方法[13]。基于度的節點重要度算法,主要考慮節點位置影響;基于路徑的節點重要度算法,主要考慮節點間路徑重要性。而對于故障啟動信息網絡的節點重要度分析本質是診斷分析出故障時候影響最大的節點或支路,或者說故障特征最明顯的節點或者支路,因此上述兩種方法不太適合于故障網絡節點重要度分析。基于特征向量的節點重要度方法根據相鄰節點的中心性來進行加權[13],不僅考慮節點鄰居數量,還考慮了其質量對節點重要性的影響,使得特征向量法的應用廣泛,包括網絡異常點定位[14]、節點重要度識別[15]、多層次網絡的節點重要度分析等。因此將特征向量中心性算法用于故障啟動信息網絡的故障中心識別是更適合的一種方式,經過試驗也證明特征向量法比基于度和路徑的算法效果更優。
下面通過將故障錄波啟動信息建模為圖信號網絡,采用圖平滑度分析方法判斷電網是否發生故障并識別故障類型;最后,基于網絡節點特征向量中心性算法識別故障元件并進行可視化展示。
1 故障啟動信息網絡信號圖建模分析
1.1 概述
圖通過將實體表示為節點并將實體間的關系表示為邊來建模物理和虛擬系統。圖G在數學上表示為G=(V,E,W),其中V={V1,V2,...,Vn}為圖中n個節點的集合,E={e1,e2...en}是圖中E條邊的集合,而W是權重矩陣,代表圖中每條邊的權重。故障啟動信息網絡信號圖的建模就是如何選擇網絡圖的節點和節點間相互關系及權重。
圖信號是定義在任意圖上的數值。對于圖G,可以表示為N維向量f=[f(1),f(2),...f(N)]T,其中f(i)是節點i上圖信號的值,緊密依賴于圖G。
故障啟動信息網絡是由啟動的那些節點和支路的錄波信息構成的信息網絡,顯然它是電網的一個子網,其網絡結構與故障電流位置、故障類型、啟動值設置大小等有密切關系。
1.2 節點及節點信號
節點啟動信息考慮母線電壓信號。目前,可以直接獲取的節點信息為突變量電壓、零序電壓,下面主要以這兩種進行分析。除此之外,根據節點連接的支路電流,也可以計算得到流入節點的故障電流、總電流等其他信息。因為如果一個變量被很多變量依賴,或被少數幾個重要的變量依賴,則變量的重要性較高。因此,有較少鏈入數的變量可能比有較多鏈入數的變量重要性更高,同時根據變量樞紐性作用的不同,變量的重要性也不相同[14]。所以選擇支路啟動元件的支路電流為權重,用節點電壓信號建模是合理的。在故障錄波信息更豐富的情況下,則通過進一步研究電流、電壓、功率、制動電流等約束關系,找到最佳適合的組合。
1.3 支路及支路權重
以線路故障電流和零序電流作為權重。線路的功率、差動電流和制動電流等信息則需要通過錄波數據進一步處理得到。
支路故障電流通過線路兩側啟動元件均可得到,因此以兩側電流絕對值的平均值作為支路電流。電力系統許多線路都是雙回線,甚至多回線,這在圖論中稱為多重圖。但一些圖分析處理算法無法直接處理多重圖,所以實際工程中,將多回線整體作為一個支路,其權重為所有多回線的故障電流之和。
為便于計算和理解,支路權重值和節點信號值均采用標幺值,基準值為對應網絡的基準電壓和基準電流值。
2 基于圖信號平滑度的啟動信息網絡信號圖的故障檢測
事實上,當對構建的啟動信息以可視化的方式(如圖1)呈現出來時,能夠看出主要的故障支路和電壓變化波動的故障節點。但如何度量這個 A相的啟動信息構成的信號網絡圖是否發生故障及其嚴重程度?在圖信號處理中,可以通過梯度測量和全局方差的計算來度量整個網絡的信號變化情況[15],即通過圖節點信號的平滑性來分析是否發生故障及故障類型。

圖1 啟動信息網絡信號
2.1 圖信號平滑度分析原理
2.1.1 量化圖信號的變化
根據信號值所在的加權圖的內在結構來定義圖信號的平滑度,網絡各節點基于權重的信號變化可以通過節點i處的梯度來分析。
圖信號f相對于邊eij在頂點i處的導數定義為
(1)
式中:f()為節點信號;wij為eij權重。
2.1.2 圖信號的全局變化平滑度
可以采用式(2)對所有各節點間梯度變化求加權和,以度量整個網絡信號的平滑性。
(2)
S2(f)也被稱為圖拉普拉斯二次型。 當圖平滑的時候S2(f)小, 反之S2(f)則較大。因此S2(f)度量了整個網絡的全局平滑度或者網絡信號變化波動程度。 對于啟動信息網絡信號圖而言,S2(f)為所有節點電壓相對于支路電流的變化量之和。由于故障分布不均勻,故障節點及其支路比非故障節點及其支路的特征差別明顯,因此通過計算啟動信息網絡信號圖的S2(f)可以作為度量電網故障嚴重程度的一個判據(引起網絡變化波動程度)。
2.2 基于圖拉普拉斯二次型 S2(f)的故障檢測
2.2.1 分相故障檢測
由于非故障相在網絡中整體變化差異比故障相小得多,因此可以通過對不同相啟動元件的S2(f)進行計算,就可以識別發生的故障相。
不同網絡結構,不同地點發生故障時的S2(f)不同。同一個網絡運行方式發生變化的時候,其S2(f)變化差異不大,所以比較準確的檢測差異定值可以采用常見運行方式下的S2(f)均值作為參考。以IEEE 39節點為例,故障相平均S2(f)為1.65,非故障相平均S2(f)為0.16,因此可以將(1.65-0.16)/2=0.75作為識別依據。事實上,故障相S2(f)最低為1.12,非故障相S2(f)最高為0.21,因此能夠較好識別。對IEEE 39節點網絡為例,經驗值可以取S2(f)set=0.5為檢測識別門檻。
2.2.2 接地故障檢測
零序啟動元件能夠反映系統是否發生接地故障,因此對采用零序電壓為節點信號、零序電流為支路權重構建的零序啟動信息信號圖,其S2(f)可以作為網絡是否發生接地故障的依據。由于故障波及網絡圖的零序電流和電壓變化程度比突變量更大,所以當系統未發生接地故障時候,其S2(f)接近于0,發生接地故障時候,其S2(f)大約為3.5,差異度明顯高于突變量。經驗值取S2(f)set=0.2作為接地故障識別依據。
3 基于網絡節點特征向量中心性的電網故障元件識別算法
通過圖拉普拉斯二次型對故障啟動信息網絡信號變化的全局測量,能夠識別系統是否發生故障及故障相;但對于故障元件則需要通過圖中心性進行識別。基于圖的中心性算法建模本質是圖的節點重要度計算分析,即節點對于故障感受的重要度分析。
3.1 特征向量中心性
特征向量中心性(eigenvector centrality,EC)更加強調節點所處的周圍環境(節點的鄰居數量和質量), 它的本質是一個節點的分值是它的鄰居的分值之和。節點可以通過連接很多其他重要的節點來提升自身的重要性[13]。特征向量中心性及其變體應用廣泛,例如最著名的頁面排序算法(PageRank),是谷歌搜索引擎的核心算法。
EC根據相鄰節點的中心性來對其加權,節點i的EC與連接到節點i的其他節點j的中心性之和為正比,節點i的EC計算公式為
(3)
式中:EC()為其節點EC值;λ為一個常數;Aij為圖的鄰接矩陣。通常選用鄰接矩陣最大特征值對應的特征向量,因此網絡中節點i的EC就是與節點i上鄰接矩陣的最大特征值對應的特征向量的值。
對于采用支路電流作為權重的啟動信息網絡圖,由于整個故障電流的分布中故障點最高,然后擴散到其他相鄰節點及支路,因此故障點的EC將明顯高于其他非故障的節點。對于線路故障而言,與線路連接的兩個節點的EC將最高,且明顯高于其他節點。同時,由于故障的擴散與網絡結構有關,具有一定的層次關系,使得啟動信息網絡EC分布呈現層次性。故障線路的兩個節點EC最高,其次是與這兩個節點直接相鄰的節點為第二層次,最后是其他的節點。
當網絡中有一些節點度特別大的節點時,特征向量中心性會出現分數局部化現象[13], 即大多數分值都集中在節點度大的節點上, 使得其他節點的分值區分度很低。局部化現象對于網頁排序等重要度是不利的,但對于故障啟動信息網絡的故障元件識別卻是一個優勢,能夠更好識別出故障元件。
3.2 基于節點信號的特征向量中心性方法
傳統的圖中心性算法僅考慮圖結構和權重。因此,采用支路電流的特征向量中心性算法,本質上是通過度量故障電流在網絡的分布情況來度量不同節點的故障電流傳播重要度。對于網絡中節點度大的支路故障,故障電流分布變化大,因此識別效果很好,但在那些節點度小的網絡附近故障,識別效果會下降。
考慮到節點電壓作為故障的另一個重要特征,在圖中心性度量中能夠利用到節點電壓信息,將能夠提高故障元件識別準確度。一種方式是將節點電壓和支路電流轉換為支路功率,但這種方式會增加計算量和拓撲分析難度,其次是影響各節點數據同步。另一種方式,是將節點EC和節點電壓的ECu乘積作為節點新的重要度,計算公式如式(4)。
ECu(i)=EC(i)·Ui
(4)
式中,Ui為節點突變量電壓值。ECu同時考慮了電流分布的影響和節點電壓分布的影響,提高了故障元件的識別度。
通過式(4)基于電壓的特征向量中心性ECu的計算,在ECu的排序結果中將有兩個節點的ECu最大,明顯高于其他所有支路,可診斷該兩個節點連接的支路為故障支路。基于這種方式無法識別出故障是在線路還是線路連接的兩個母線節點上,需要結合其他信息進一步判斷。
3.3 算例及分析
為驗證所提算法對于復雜的多點發生故障的檢測識別能力,以圖2網絡中分別在相鄰支路中間發生A相和C相接地故障為例進行分析。為便于比較,重要度結果均按照各向量最大值進行歸一化處理。
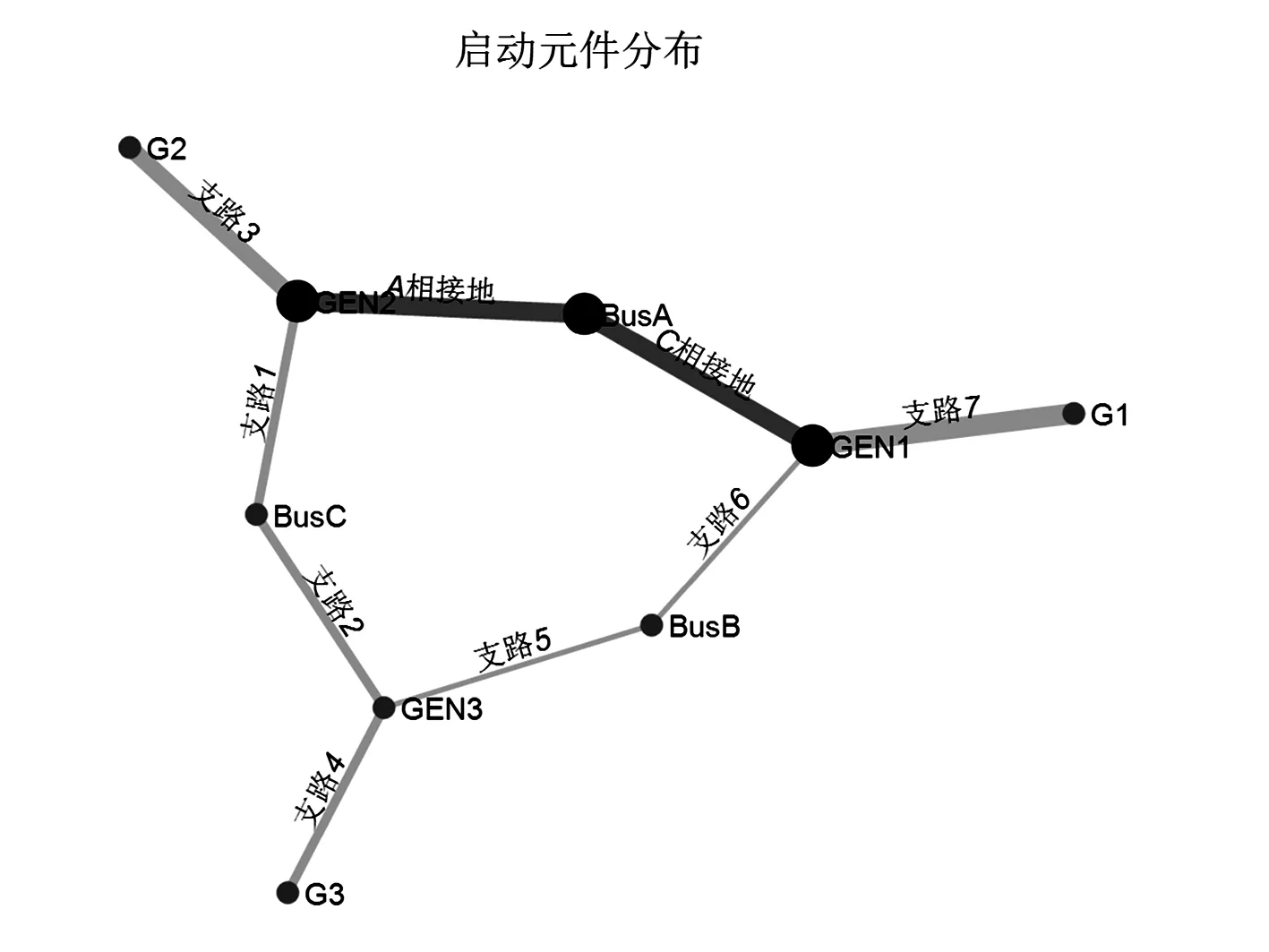
圖2 算例網絡及故障點
3.3.1 故障變化程度檢測
分別對各相和零序的S2(f)進行計算,結果如表1所示,用以評估故障相和故障類型。
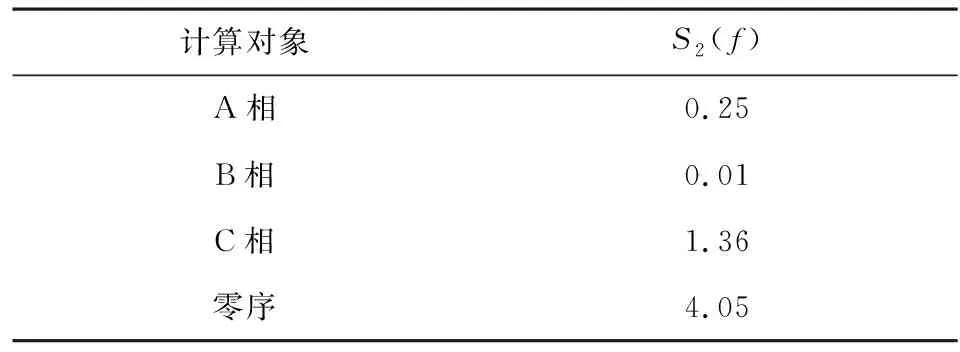
表1 A、B、C相和零序的圖平滑度分析結果
根據結果分析判斷A相和C相有接地故障。C相故障網絡和零序網絡變化波動很大,這與C相故障點更靠近主電源G1有關。零序分量波動變化明顯大于A、C相,所以基于圖平滑的接地故障檢測是比較靈敏的,這與線路零序阻抗更大,零序電壓變化也更大有關。
3.3.2 分相的故障中心點識別
由于啟動信息網絡是分相建立的,所以根據表1的檢測結果,A相和C相發生接地故障,因此分別對A相和C相進行基于ECu的中心性計算分析。為了更好利用圖信號分析便于可視化的優勢來揭示網絡變化特征,結果采用圖信號可視化方式進行展示,支路電流大小通過不同線寬表示,節點信號重要度用豎線長短表示,并在三維坐標中表示。A相特征向量中心性分析結果如圖3所示。

圖3 算例A相中心性分析結果
從A相特征向量中心性分析結果可以看出,故障支路連接的兩個節點BusA和GEN2重要度值ECu接近1,在第一層次;與之相鄰的G2、BusC和Gen1為第二層次,其重要度值平均為最大值的20%左右;最后是其他層節點,重要度低于5%。與僅考慮結構不考慮電壓的EC相比,其故障節點和非故障節點差別更大,因為考慮了電壓的因素,所有區別更明顯,對于故障中心識別效果更優。但EC對于電流分布變化的層次變化更明顯。
C相中心性分析結果如圖4所示。類似于A相,C相的特征向量中心性正確識別故障線路對應節點BusA和GEN1。由于C相故障更嚴重,所以相對于EC,ECu與EC在第二層次差距相當明顯。排序3的EC為0.6,排序2的EC為0.8,兩者只差0.2,對應的ECu差異值為0.6,所以識別準確度明顯更高,這與考慮了電壓因素有直接關系。

圖4 算例C相中心性分析結果
3.3.3 基于零序的故障中心點識別
零序中心性分析結果如圖5所示。不同于A、C相,由于同時在多點接地,所以零序的特征向量中心性值ECu識別最大的故障節點為兩條線路的中間節點BusA,且比排序2和3的節點ECu大0.8,呈現出一個故障點的狀態。
4 實際電網故障驗證及分析
對某500 kV電網實際發生的故障進行算法驗證。由于目前尚未實現啟動元件動作信息主動上傳,需要進行設置和改進部分設備方可實現。首先,從保護信息主站將故障時候所有啟動的故障錄波信息召喚上來;然后,利用主站分析功能得到啟動值,通過調度自動化系統得到網絡拓撲值,構建出啟動元件的故障波及網絡圖。圖6所示為N1和N5節點間支路L1發生A相接地故障。
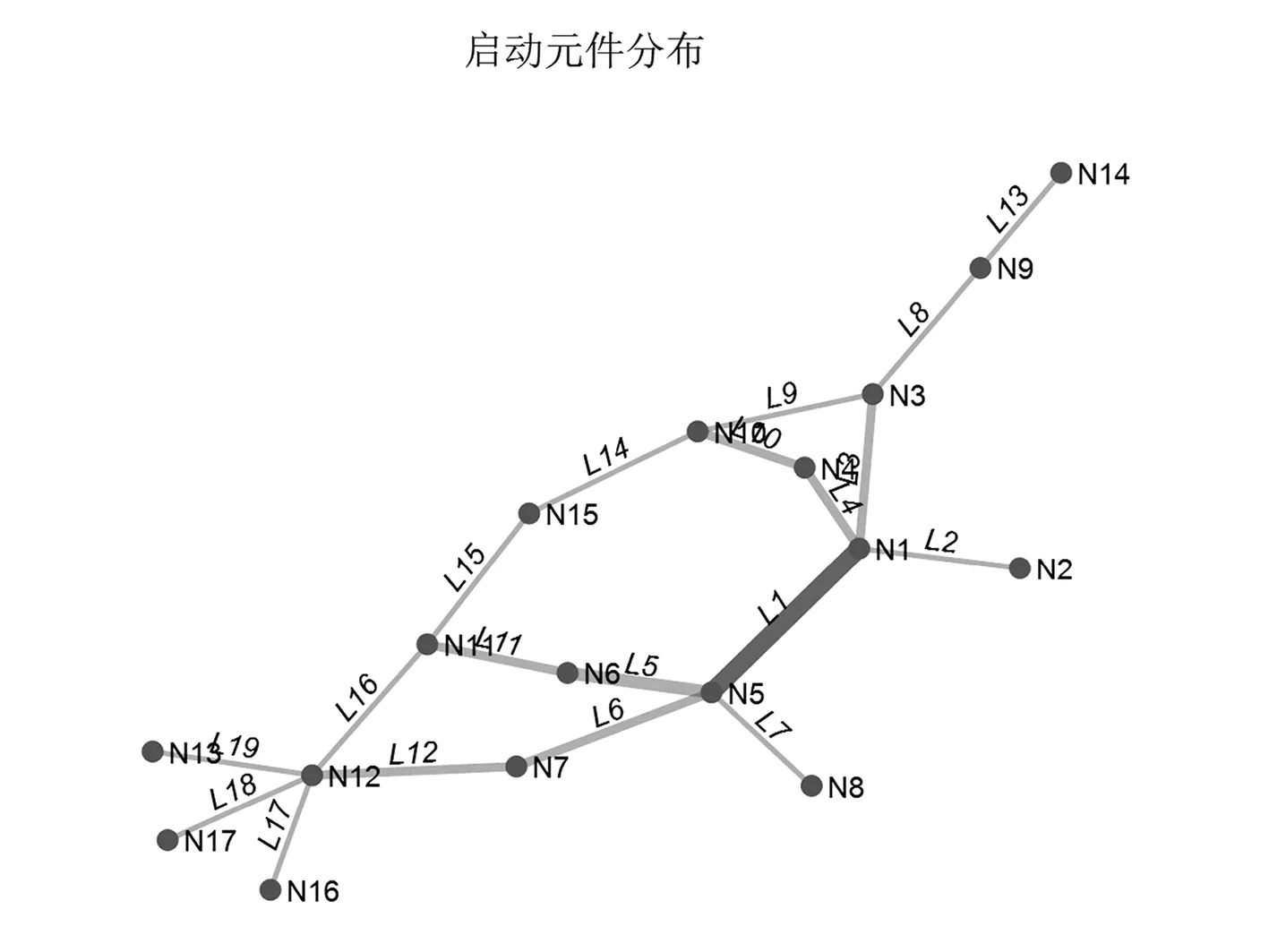
圖6 實際案例故障波及網絡及故障點
4.1 故障變化檢測
分別對各相和零序的S2(f)進行計算,結果如表2所示。
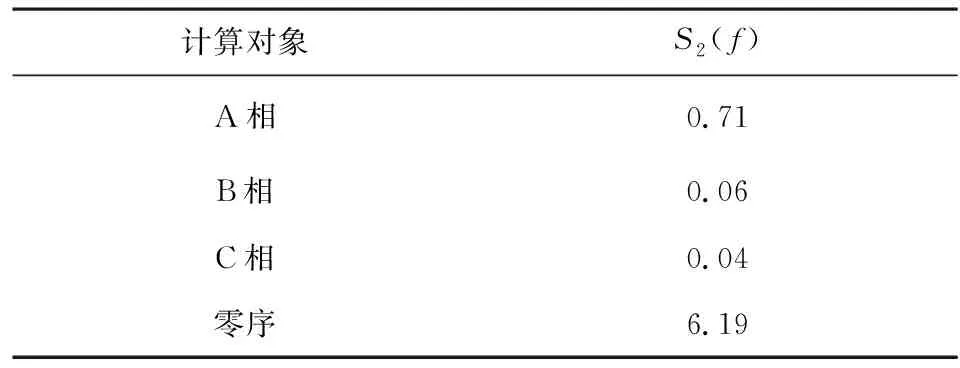
表2 A、B、C相和零序的圖平滑度分析結果
根據結果分析判斷A相有接地故障。由于網絡規模比算例更大,所以整體的平滑度值S2(f)比算例更大,網絡越大,結構越復雜,越能體現所提算法的優越性。
4.2 分相的故障中心點識別
對A相啟動信息進行特征中心性分析,如圖7所示。故障中心節點N1和N5的節點重要度均接近1,其余節點重要度小于0.26,識別故障元件為N1和N5節點間的支路L1。

圖7 實際案例A相中心性分析結果
4.3 基于零序的故障中心點識別
實際案例的零序特征向量中心性計算分析結果如圖8所示。由于零序網絡變化差異更大,所以體現在特征向量中心性排序上,其曲線明顯比A相更陡。

圖8 實際案例零序中心性分析結果
5 結 論
上面利用故障錄波的啟動值信息進行圖信號建模,利用圖拉普拉斯二次型進行故障波動程度度量,以檢測故障類型以及故障相,并利用基于節點電壓的特征向量中心性算法進行故障元件識別。由于充分利用了基于特征向量中心性算法對于支路電流變化和節點電壓變化的特征,該算法能有效識別故障元件,并且通過節點排序還能夠層次化的識別故障層次。特征向量中心法對于結構復雜的網絡更有優勢,有助于快速掌握電網故障情況并有重點地收集錄波數據進行故障分析和校核,提高錄波分析效率。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
中華手工(2017年2期)2017-06-06 23:00:31
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
中外會展(2014年4期)2014-11-27 07:46:46
