基于門控循環單元的駕駛行為辨識研究
2022-01-18 12:06:44薛俊俊陳雙
汽車實用技術 2021年24期
薛俊俊,陳雙
基于門控循環單元的駕駛行為辨識研究
薛俊俊,陳雙
(遼寧工業大學 汽車與交通工程學院,遼寧 錦州 121000)
準確識別駕駛行為,有利于提高車輛行駛安全性。文章針對目前駕駛行為識別方法的主觀性和識別準確率低的問題,從駕駛員的角度出發,建立了基于門控循環單元網絡的駕駛行為辨識模型。利用駕駛模擬器獲取駕駛員操縱數據并建立駕駛行為數據集,模型經過訓練后,能夠有效利用駕駛員操縱數據的時序特征,成功識別緊急加速、緊急制動和平穩直線行駛,模型的識別準確率到達96.67%,為交通安全領域提供重要的理論支持。
駕駛行為辨識;深度學習;門控循環單元
前言
基于車輛行車數據進行駕駛行為識別的研究方法大多為傳統機器學習算法,其中最具代表性的方法是隱馬爾可夫[1]、支持向量法[2]和模糊控制[3],這些方法需要人工提取特征,特征的選取會因人而異,主觀性較強。
隨著人工智能的逐漸普及,深度學習成為近幾年的研究熱點,它的優勢在于非線性映射數據特征層并且可以自動快速構建深層特征。ZYNER等人[4]提取激光雷達跟蹤系統的數據,建立循環神經網絡模型,推斷駕駛員在無信號燈交叉路口處對車輛的操作行為。JOAKIM[5]建立混合密度模型,提取當前車輛行駛軌跡以及該車與周圍車輛的相對行駛軌跡的特征,預測駕駛員變道意圖。惠飛等人[6]提出雙向長短記憶網絡及全連接神經網絡的拓展神經網絡檢測模型,能有效利用行車數據在時間序列上發生突變時的特征,提高異常駕駛行為識別準確率。WANG等人[7]利用深度學習對時間序列處理的突出優勢,將歷史時刻的車速、速度差以及車輛位置差作為模型輸入,建立了基于GRU網絡的車輛跟馳模型。實驗結果表明,該深層神經網絡模型比傳統跟車模型,精度更高,測試效果更好。
本文基于駕駛員操縱數據和車輛行駛狀態數據進行駕駛行為識別,這些數據是典型的時間序列數據,而門控循環單元(簡稱GRU)網絡在處理時序問題有突出優勢,目前對GRU的研究主要集中在音頻識別[8]、交通流量預測[7]等領域中,GRU還未被用于針對車輛本身在駕駛員的角度對駕駛行為進行識別的研究。因此,本文建立了GRU網絡模型對駕駛行為進行辨識。利用GRU網絡處理時序數據的優勢,自動提取駕駛行為發生時的時序結構特征,有利于提高辨識準確度。最后,利用Softmax函數計算出駕駛員操作行為,即緊急加速、緊急制動和平穩直線行駛的識別率。
1 門控循環單元網絡
長短期記憶網絡(簡稱LSTM)[9]引入了門控機制調節信息流,成功解決了循環神經網絡存在的梯度消失等問題。然而,LSTM模型結構復雜,需要較長的訓練時間。2014年CHO等人[10]針對優化LSTM的結構提出了GRU網絡,結構如圖1所示。GRU在處理與時序高度相關的問題上是其他神經網絡無法媲美的。

圖1 GRU結構
圖中z代表更新門,r代表重置門,h是GRU網絡在時刻的輸出,由前一時刻的輸出信息h1和當前記憶內容h'組成的,利用更新門控制這兩類信息的流入。GRU網絡更新權重參數公式如下:





2 駕駛模擬器試驗與數據獲取
2.1 試驗工況
駕駛員對車輛的操縱行為主要有加速、制動和轉向,本文主要研究車輛縱向行駛的駕駛行為,分別是緊急加速、緊急制動、以及平穩直線行駛,其中平穩直線行駛包括正常加速、正常制動和勻速行駛。
以中華H30轎車為主體的駕駛模擬器作為試驗平臺,如圖2所示。選擇20個不同年齡的駕駛經驗豐富的志愿者,每人進行2次實驗。車輛起步時采集駕駛員操縱數據,包括制動踏板開度、加速踏板開度、速度和加速度。

圖2 駕駛模擬器試驗平臺
2.2 試驗數據處理
由于d SPACE實時仿真系統采樣頻率為1 000 Hz,采集了大量的試驗數據,后續處理十分復雜。為了提高效率,對將試驗數據進行重采樣,采樣頻率調整為100 Hz。在采集數據的過程中,不可避免地會受到運行設備的電磁波干擾,試驗數據中混入白噪聲。中值濾波能使白噪聲對數據影響降到最低,且對數據準確性影響也較小。濾波后加速度如圖3所示。
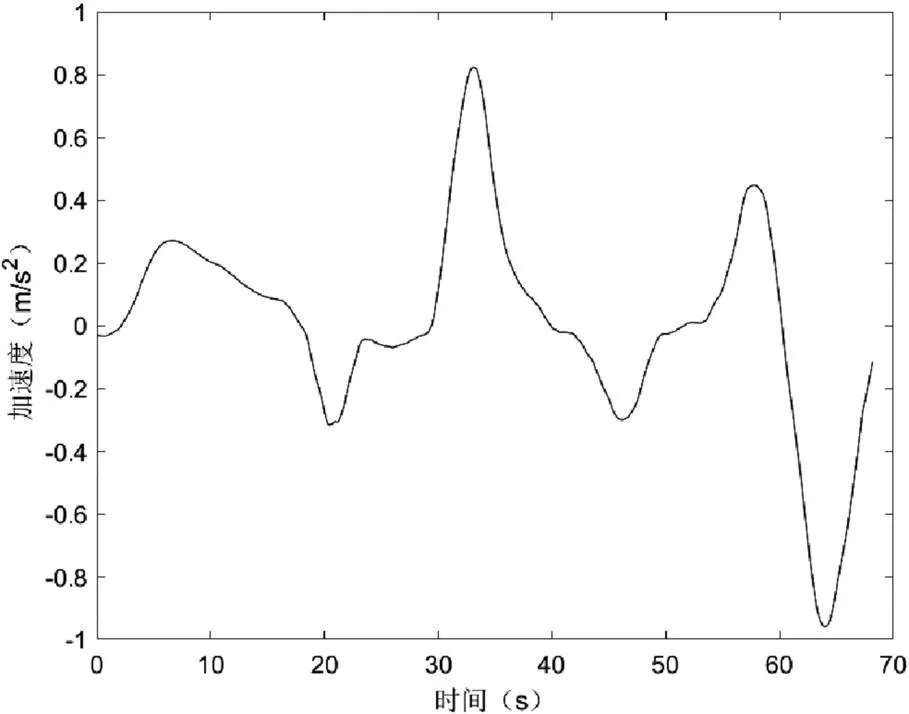
圖3 濾波后的加速度曲線
2.3 建立駕駛行為數據集
當車輛在平直良好的路面上正常行駛時,車輛加速度變化范圍是?0.4 m/s2<<0.4 m/s2。利用滑動窗口法,截取3 s內駕駛行為發生的數據,并貼上標簽。本文共截取300個數據段,建立了駕駛行為數據集。其中包括180組平穩直線行駛數據段,標記為類別1;60組緊急加速數據段,標記為類別2;60組緊急制動數據段,標記為類別3。
3 實驗過程及結果分析
3.1 模型的訓練優化
本文所使用的算法是在Matlab軟件中實現的,網絡模型包含四層,分別是輸入層、GRU層、全連接層和Softmax層。設置學習率為0.001,采用交叉熵損失函數和SGDM優化算法用來訓練模型,加快參數更新速度,使辨識模型的擬合效果更好。建立網絡模型后,輸入數據集中的樣本。從數據集中隨機選取80%為訓練集,20%為測試集,前者對用于模型訓練,后者用于模型測試。
辨識模型在訓練過程中的損失函數變化如圖4所示,模型的損失函數值一直呈現下降的趨勢,并且下降速度較快,隨著迭代次數增多,損失函數穩定在0.1。本文基于GRU網絡建立的駕駛員操作行為辨識模型準確率高,損失值小,收斂速度快,易于訓練。

圖4 損失函數
3.2 實驗結果分析
辨識模型經過訓練后達到最優模型,利用測試集對模型進行測試。圖5是測試集對辨識模型測試過程中的誤差對比圖。從圖中可以看出模型的預測類別與真實類別分布十分接近,誤差較小。
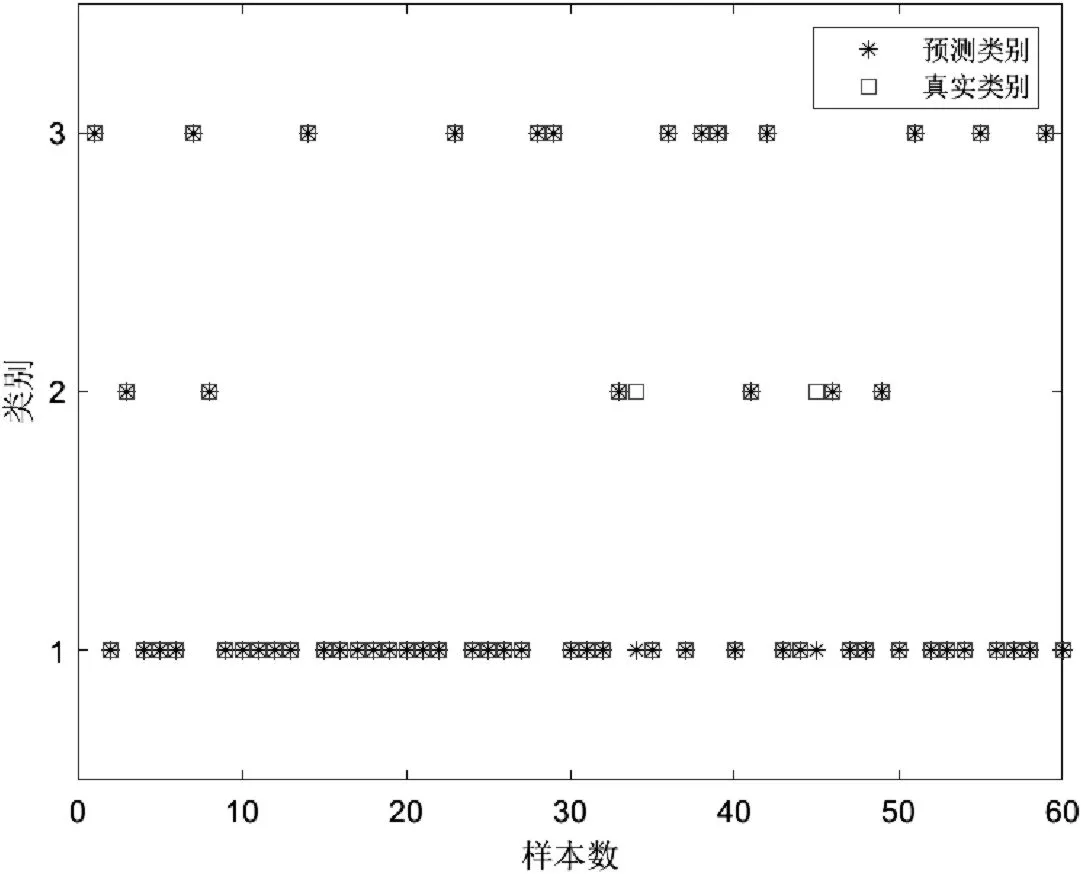
圖5 測試誤差對比圖
利用辨識模型在測試集上得到的測試結果繪制模型的混淆矩陣,如圖6所示,能夠更直觀地顯示辨識模型對不同駕駛行為的識別能力。模型產生錯誤的辨識主要集中在正常行駛和緊急加速。這可能是因為有些駕駛員在緊急加速時比較謹慎,使得模型將兩類駕駛行為混淆。

圖6 混淆矩陣
表1是辨識模型的識別率。辨識模型對緊急加速和緊急制動的辨識準確率高達100%,整體識別率為96.67%,辨識效果非常好。實踐證明,本文基于GRU網絡建立的駕駛員操作行為辨識模型準確性好,能夠成功辨識駕駛行為。
表1 辨識模型的識別率
駕駛行為準確率/% 正常行駛95.12 緊急加速100 緊急制動100 總識別率96.67
4 結論
辨識駕駛行為是提高交通安全的重點研究內容,目前,使用深度學習對駕駛行為進行識別的研究比較少。本文首次基于GRU網絡建立辨識模型,用于以駕駛員操縱數據和車輛行駛狀態數據為依據的駕駛行為辨識。利用駕駛模擬器采集的數據組成數據集對模型進行訓練和測試,計算出駕駛員對車輛進行緊急加速、緊急制動和平穩直線行駛的識別率,模型整體識別率為96.67%。實驗結果表明,該模型能夠成功識別各類駕駛行為,辨識準確度高。
[1] SONG Weilong, XIONG Guangming, CHEN Huiyan. Intention- aware autonomous driving decision-making in an uncontrolled intersection[J]. Mathematical Problems in Engineering,2016, 2016:1-15.
[2] WANG Wenshuo, XI Junqiang. A rapid pattern-recognition me- thod for driving types using clustering-based support vector machines[J]. American Control Conference,2016:5270-5275.
[3] DANG Ruina, ZHANG Fang, WANG Jianqiang, et al. Analysis of Chinese driver's lane change characteristic based on real vehicle tests in highway[J].International IEEE Conference on Intelligent Transportation Systems.IEEE,2014:1917-1922.
[4] ZYNER A, WORRALLl S, NEBOT E. A recurrent neural network solution for predicting driver intention at unsignalized intersections [J]. IEEE Robotics and Automation Letters,2018,3 (3):1759-1764.
[5] JOAKIM A. Predicting vehicle motion and driver intent using deep learning[D].Gothenburg:Chalmers University of Technology, 2018:1-60.
[6] 惠飛,郭靜,賈碩,等.基于雙向長短記憶網絡的異常駕駛行為檢測[J].計算機工程與應用,2020,56(24):116-122.
[7] WANG Xiao,JIANG Rui,LI Li,et al.Capturing car-following behaviors by deep learning[J]. IEEE Transactions on Intelligent Transpor- tation Systems (S1524-9050),2018,19(3):910-920.
[8] WU Zhizheng,KING S.Investigating gated recurrent networks for speech synthesis[C].2016 IEEE International Conference on Acoustics,Speech and Signal Processing,2016:5140-5144.
[9] FAWAZ H I, FORESTIER G, WEBER J, et al. Deep learning for time series classification:a review[J].Data Mining and Knowle- dge Discovery,2019,33:917-963.
[10] Cho K,Van Merri?nboer B,Gulcehre C,et al.Learning phrase representations using RNN encoderdecoder for statistical ma- chine translation[J].arXiv preprint arXiv:1406.1078,2014.
Research on Recognition of Driving Behavior Based on Gated Recurrent Unit
XUE Junjun, CHEN Shuang
( College of Automotive and Transportation, Liaoning University of Technology, Liaoning Jinzhou 121000 )
Accurate recognition of driving behavior plays an important role in vehicle driving safety. Aiming at the subjectivity and low recognition accuracy of current driving behavior recognition methods, this paper establishes a driving behavior recognition model based on the gated recurrent unit.The driving simulator is used to obtain driver manipulation data and establish a driving behavior data set. After the model is trained, it can effectively use the timing characteristics of the driver manipulation data to successfully recognize driving behavior. The recognition accuracy of the model reaches 95.24%, which provides important theoretical support for the field of traffic safety.
Driving behavior recognition; Deep learning; Gated recurrent unit
U471.15
A
1671-7988(2021)24-30-04
U471.15
A
1671-7988(2021)24-30-04
10.16638/j.cnki.1671-7988.2021.024.007
薛俊俊(1997—),女,碩士研究生,就讀于遼寧工業大學汽車與交通工程學院,研究方向:車輛系統動力學及控制。
遼寧省高等學校創新人才計劃。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車電器(2018年1期)2018-06-05 01:22:54
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學與工程(2015年4期)2015-09-26 11:59:03
