步進電機S型加減速算法改善研究
2022-01-18 03:02:14劉錦杭
機械工程與自動化 2021年6期
劉錦杭
(惠州城市職業學院 機電學院,廣東 惠州 516025)
0 引言
步進電機的加減速控制一直是影響電機運行的重要因素,突變的加減速會導致電機失步,造成位置與精度誤差,因此必須有合理的加減速控制來保證電機能夠平穩順暢地運行。電機的運行是一個“加速-恒速-減速-停止”的過程,在此過程中,當控制系統極限啟動頻率大于電機所需運行速度時,電機可以直接啟動;當控制系統通過停止發送驅動脈沖或讓使能離線時電機停機。若在電機啟動時,直接以正常運行速度啟動,容易導致電機失步或無法啟動。為了避免此情況,電機啟動后需要有一個均勻加速的過程來慢慢達到要求的運行速度。另一方面,由于慣性的存在,電機停止容易沖過設定的目標位置,造成位置偏離,正常的電機停止應該使啟動速度等于或略高于減速過程結束時的速度,經低速運行若干步后停止。為保證步進電機運行的穩定、平滑,本文從電機的加減速控制算法入手,通過改善S型加減速算法來實現電機的穩定運行,并通過MCU控制器對運行過程進行仿真,以驗證改善后的S型加減速算法的可行性。
1 電機加減速控制方法分析
目前對電機加減速的控制主要有T型加減速算法和S型加減速算法,如圖1、圖2所示。圖2中,c為加加速度,是一常數;0~t1時間段為加加速階段,速度由起始速度增加到中間速度v1,加速度a逐步增加;t1~t2時間段為減加速階段,速度由v1上升到運行速度vt,此時間段內加速度a減小到零,加加速度為負值;t2~t3時間段為均速運行階段;t3~t4、t4~t5分別為加減速階段和減減速階段,與加速曲線對稱,兩時間段內加速度a為負值。對比兩種控制方式在啟動瞬間、加速結束、開始減速、減速完成四個節點的情況,T型加減速算法在加減速過程中角加速度突變不連續,導致角速度ω不能平滑過渡,而S型加減速算法在加減速階段與勻速階段都是連續的,且加速度的變化率是可控的,這有利于電機控制性能的提高。但是相對來說,T型加減速算法容易實現,而S型加減速法算法比較復雜。
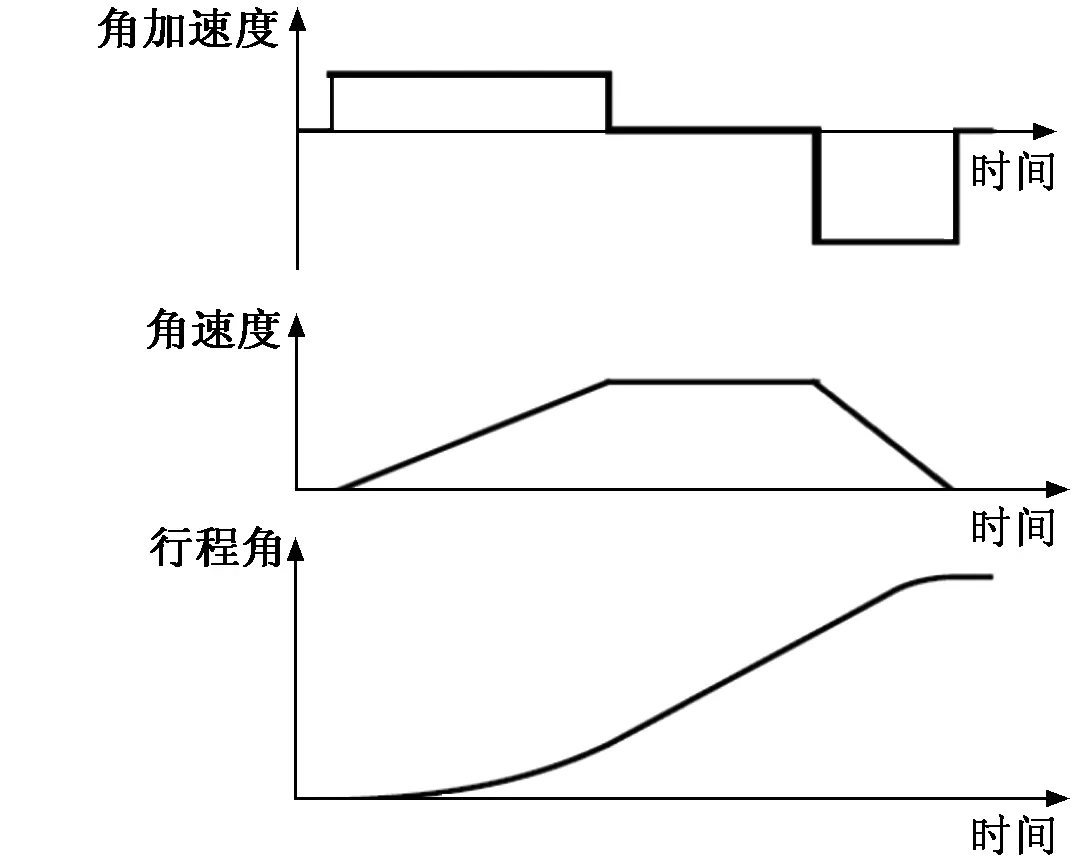
圖1 T型加減速算法曲線

圖2 S型加減速算法曲線
2 S型加減速算法改善
基于對兩種算法的分析,S型加減速算法有利于提高步進電機的運動穩定性,避免機器運動時造成的柔性沖擊,本文對S型加減速算法進行研究。S型曲線來源于Sigmoid函數,是一個在生物學中常見的S型函數,其定義為:
(1)
曲線方程(1)將橫坐標的任一實數映射在(0,1],如圖3所示,曲線平滑,能夠引入作為電機的加減速曲線。

圖3 Sigmoid函數曲線
由圖3曲線可見,式(1)的曲線方程在x軸上有負值,因此不能直接用于步進電機的加減速控制,對方程(1)進行拉伸和平移,以適應電機加減速曲線的實際需要,變換后方程如下:
(2)
其中:A、B分別為y方向平移和拉伸分量;a、b分別為x方向平移和拉伸分量。
對比式(2)與式(1),y方向進行A分量的平移和B分量的拉伸,A、B分量可用于控制電機速度或頻率的取值范圍;x軸方向進行a分量平移與b分量拉伸,a分量與b分量用于控制電機速度或頻率變化率。變換后的曲線依然是理論上的曲線,需要對曲線進行離散化使其能夠適用于電機的加減速控制。離散即把曲線離散成各個頻率段,在程序中保存時間點和與其對應的頻率,并形成表格,在系統運行時根據已有表格中的頻率值依次進行加載生成實際的脈沖曲線,使脈沖曲線與理論曲線相擬合,加速階段的曲線離散后如圖4所示。圖4中,t1為中間速度(拐點速度)時刻,即電機在此時間前為加加速階段,在此之后為減加速階段;t2為電機加速完成進入均速運行時刻;t′為離散實現過程中將加速時間平均分成若干個固定長度的時間段。由于頻率與速度之間只相差一個脈沖當量并且成正比關系,因此曲線算法也適用于速度。

圖4 加速階段的曲線離散
離散化后,加速過程曲線方程為:
F=Fmin+(Fmax-Fmin)/(1+e-f(i-m)/m).
(3)
其中:F為加速曲線當前頻率;Fmin為加速曲線起始頻率;Fmax為加速曲線目標頻率;i為循環計算索引,從0開始到選取的加減速點總數;f為曲線的斜率,f越大曲線越陡峭;m為1/2加減速點總數。
對應式(2),離散后相當于A分量=Fmin,B分量=Fmax-Fmin,a分量=f/m,b分量=f。
變量f取值的大小決定著S曲線壓縮的程度,理想的S曲線f取值為4~6。設電機起始速度=20 r/min,電機最大速度=200 r/min,設f=4、f=5、f=6,求得三個f對應的速度曲線,如圖5所示。

圖5 三個f對應的速度曲線
從圖5可以看出,在三個曲線中,遵循f越大曲線相對越陡峭,f越小曲線相對平穩,越接近勻加速的軌跡。由此可知,控制f的取值可以使得步進電機加減速時速度平滑地過渡。S型加減速算法原理設計曲線核心代碼如下:
void CalculateSModelAccelLine(u16 usArrPerd[], float usLinePoint,float fMaxFreq,float fMinFreq,float fAccelRatio)
{
int i;
float freqTmp;
float deno;
float melo;
float delt=fMaxFreq-fMinFreq;
for(i=0;i { melo=fAccelRatio*(i-usLinePoint/2)/(usLinePoint/2);deno=1.0/(1+expf(-melo)); freqTmp=delt*deno+fMinFreq; usArrPerd[i]=(u16)(1000000.0/freqTmp); } } 應用STM32F103VCT6單片機來控制步進電機,以STM32F103VCT6的高級定時器產生PWM信號驅動電機,步進電機所需的驅動芯片選用東芝公司的TB6560,并將驅動電路設計到控制器內部。控制系統以定時中斷加PWM的方式發送指定脈沖數,控制PWM輸出引腳的電平即可控制脈沖數。PWM的輸出由定時中斷捕捉,一個脈沖需經兩次定時器中斷才能產生,由此可得到ARR(定時器裝載值),計算方法如下: (4) 其中:fclk為定時器的時鐘頻率;fTarget為脈沖目標頻率。 設定步進電機起始頻率Fmin為1 000 Hz,最大頻率Fmax為10 000 Hz,加加速度c為100 000脈沖/S3,采用Keil軟件通過調試微控制器讀取內存值,由內存值繪制頻率與時間關系曲線,如圖6所示。由圖6可見,頻率與時間關系曲線符合S型加減速特性,在加減速過程中能夠平滑過渡。 圖6 頻率與時間關系曲線 在實際應用中對步進電機的控制一般有停機、加速、運行和減速4種狀態,這4種狀態對應了S型加減速曲線的整個過程,步進電機控制狀態機如圖7所示。 圖7 步進電機控制狀態機 根據電機控制的4個狀態設計出控制代碼,步進電機狀態機核心代碼如下: void MotorControl(void) { switch (g_stStepMotor.m_ucMotorState) { case MOTOR_STOP://停機狀態處理 break; case MOTOR_ACCEL://加速狀態處理 if (usAccelPulseNum { //加速點數未到,繼續設定PWM頻率 TIM3->ARR=(ucSpeedAccel[usAccelPulseNum]>>1); usAccelPulseNum++;// } if(usAccelPulseNum>=ACCEL_POINT_NUM) { //達到設定的加速點數,將電機狀態切換至運行狀態 TIM3->ARR=(ucSpeedAccel[ACCEL_POINT_NUM-1]>>1); g_stStepMotor.m_ucMotorState=MOTOR_RUN; } break; case MOTOR_RUN://運行狀態處理 break; case MOTOR_DECEL://減速狀態處理 if (usDecelPulseNum>0) { //減速點數未到,繼續設定PWM頻率 TIM3->ARR=(ucSpeedDecel[usDecelPulseNum]>>1); usDecelPulseNum--; } if (usDecelPulseNum<=0) { //達到設定的減速點數,停機處理 usDecelPulseNum=0; usAccelPulseNum=0;//清零相關數據 MOTOR_SET_TQ2; MOTOR_SET_TQ1;//釋放電機力矩 MOTOR_DISABLE;//步進電機脫機控制 TIM_Cmd(TIM3,DISABLE);//失能PWM定時器 g_stStepMotor.m_ucMotorState=MOTOR_STOP;//切換至停機 } break; } } 研究了將S曲線引入步進電機的加減速控制中,通過對S曲線進行轉換與離散,得出了可運用于實際電機加減速控制的方程,針對離散后的方程給出了S型加減速核心代碼,并進行了仿真實驗。仿真實驗結果表明:步進電機按照改善后的S型曲線法進行加減速,整個運行過程較為平穩,沒有產生沖擊和跳變。3 單片機控制步進電機速度實驗
3.1 脈沖頻率輸出
3.2 實驗仿真

3.3 步進電機控制狀態機

4 結語
