高職院校汽車智能與網聯課程改革研究
2022-01-20 21:15:46張賀鯤崔傳真
內燃機與配件 2022年4期
張賀鯤 崔傳真



摘要: 隨著智能網聯汽車的發展,越來越多的高職院校都在探索如何培養懂汽車智能網聯技術的技能人才,而人才培養的關鍵是課堂教學。本文在分析當前汽車智能與網聯課程教學現狀的基礎上,提出一些教學改革措施,嘗試打破傳統的學科式知識體系,將教學內容項目化,將教學過程理實一體化,突出“做中學”的理念。
Abstract: With the development of intelligent networked vehicles, more and more vocational colleges are exploring how to cultivate skilled talents who understand the technology of intelligent networked vehicles, and the key to talent training is classroom teaching. Based on the analysis of the current teaching status of the automobile intelligence and networking course, this paper proposes some teaching reform measures, trying to break the traditional subject-based knowledge system, project the teaching content, integrate the teaching process with theory and practice, and highlight "learning by doing" concept.
關鍵詞: 智能網聯;項目化;理實一體化;做中學
Key words: intelligent network connection;projectization;integration of theory and practice;learning by doing
中圖分類號:G642 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章編號:1674-957X(2022)04-0239-03
1 ?汽車智能網聯課程建設背景
隨著駕駛安全、資源環境問題的日益凸顯,汽車電動化、智能化、網聯化和共享化發展加速,智能網聯汽車已經成為未來汽車發展的必然方向。2018年,國家發改委發布了《智能汽車創新發展戰略》(征求意見稿),將智能汽車作為汽車產業發展新方向,并將人才培養作為重點部署工作。同年,交通運輸部與工信部、公安部聯合出臺了《智能網聯汽車道路測試管理規范(試行)》,指導地方有序開展智能網聯汽車的道路測試工作。2020年11月,在世界智能網聯汽車大會上,我國發布的《智能網聯汽車技術路線圖2.0》對我國的智能網聯汽車發展提出了三個階段的規劃:2020-2025年為發展期,提出到2025年L2和L3級新車銷量占比將達到50%;2026-2030年為推廣期,我國HA級自動駕駛(高速公路高度自動駕駛)實現規模化應用;2031-2035年為成熟期,2035年以后FA級自動駕駛(完全自動駕駛)乘用車開始應用。
智能網聯汽車技術和產業發展是中國汽車工業轉型升級的重要機遇,如何緊跟行業動態,是企業和學校面臨的共性問題[1]。學校應圍繞智能網聯汽車,明確產業人才需求,加強復合型人才的培養力度,推動智能網聯汽車后市場技能型和服務型人才的有效供給。
2 ?智能網聯汽車人才現狀及崗位需求分析
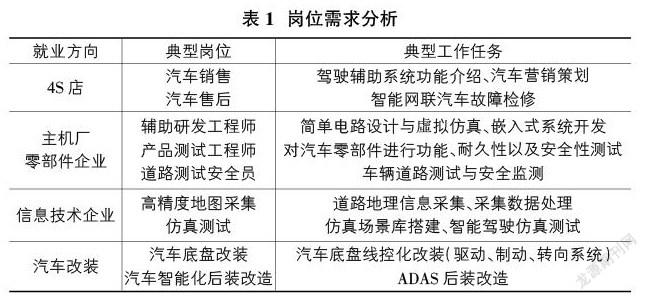
據調查統計,我國智能網聯汽車人才缺乏已成為制約我國汽車智能網聯汽車產業快速發展的關鍵因素。《智能汽車創新發展戰略》(征求意見稿)提到,深化產教融合,鼓勵企業與高等院校合作開發相關專業,協同培養具有創造性的中青年科技人才、管理人才和高級技工。當前很多院校所傳授的專業知識與產業實際需求存在一定的差距,現有人才數量與實際崗位需求數量相比嚴重不足,智能網聯汽車發展需要的是復合型人才。根據調研,列舉了智能網聯汽車的相關崗位需求[2],如表1所示。
3 ?智能網聯汽車課程改革
3.1 教學現狀
以本校汽車智能與網聯課程教學為例,由于汽車智能與網聯涉及環境感知技術、底盤控制技術、導航定位技術、網絡通信技術等,知識體系龐大,現有教材多集中在理論講授,可參考的成熟的項目化教材較少,大多沿用傳統學科式的知識體系,即從各類環境感知傳感器到汽車駕駛輔助系統的模式。雖然開設汽車智能與網聯這門課程與產業發展相適應,但理論為主的課堂教學無法調動學生學習興趣,缺少實踐環節,學生參與度不夠,并沒有體現“做中學”的項目化教學思想,因此需要就這種現狀進行改進。
3.2 實訓室建設
為更好地服務于汽車智能技術專業發展,通過對同類院校和智能網聯汽車關聯企業的調研,對原有汽車電器實訓室進行改造升級,配備圖1所示的汽車智能與網聯實訓設備。
通過上述實訓設備能夠進行智能網聯汽車的拆、裝、調、測,支持汽車智能與網聯、汽車線控技術等課程的理實一體化教學,并滿足智能網聯汽車檢測與運維1+X考試實踐技能訓練和大學生科技創新的需要。
3.3 教學內容項目化,教學過程理實一體化
3.3.1 教學內容項目化框架圖
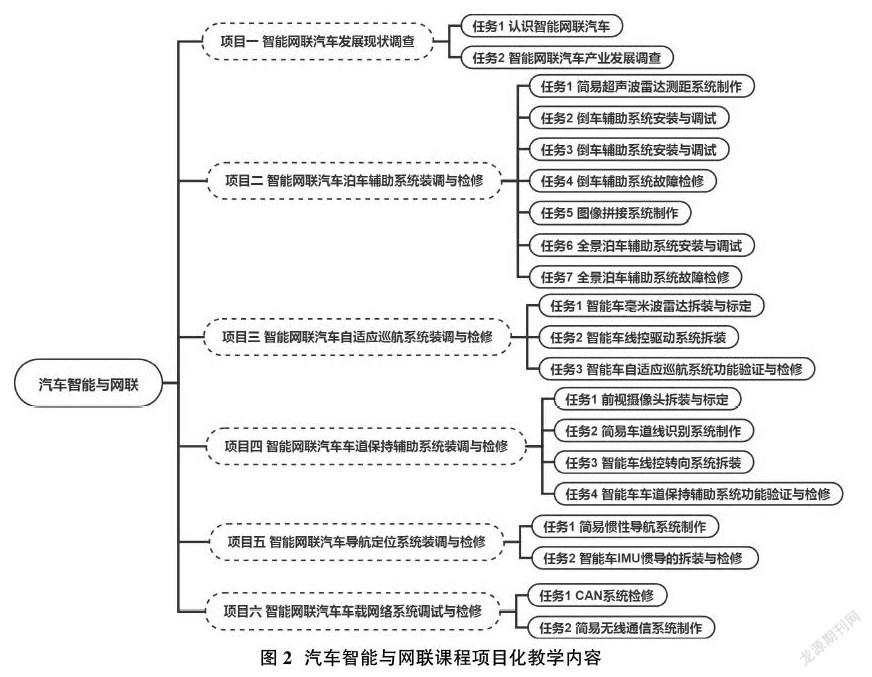
根據所屬專業人才培養方案、課程標準要求,結合1+X智能網聯汽車檢測與運維技能等級要求,由校企混編教學團隊研討,確定了圖2所示的項目化教學內容,著重培養學生規范檢測與運維汽車智能網聯系統的能力和職業素養。
課程從整車駕駛輔助系統為切入點,打破以知識傳授為主要特征的傳統學科課程模式,轉變為以任務為中心,組織課程內容和課程教學,將知識點融入到具體的任務中,讓學生在完成具體任務的過程中來構建相關理論知識,并發展職業能力,過程中融入課程思政、工匠精神、勞動教育等。
3.3.2 教學案例
以上述項目化教學內容的項目二為例,圍繞泊車輔助系統的裝調與檢修開展教學,由于泊車輔助系統的核心傳感器是超聲波雷達,因此學生在學完本項目后應具備超聲波雷達的理論知識和應用技能,即在知識目標層面,要求理解超聲波雷達的結構和測距原理;在技能目標層面,要求掌握智能網聯汽車泊車輔助系統裝調與檢修技能。在傳統的教學過程中,對于超聲波雷達的講授,以理論講解為主,忽略了“做中學”的思想,因此本文以泊車輔助系統為載體,構建不同的實操任務,將超聲波雷達結構和測距原理、泊車輔助系統雷達裝調技能、泊車輔助系統攝像頭裝調技能、智能網聯汽車泊車輔助系統電路圖識讀技能等知識目標和技能目標貫穿其中。
①案例一。
以簡易超聲波雷達測距系統制作為例闡述教學實施過程。智能網聯汽車與傳統汽車類似,在故障檢修層面都是基于數據流和線束檢查,一旦明確是傳感器或者控制器故障后,進行更換,學生還是不能理解智能化的本質,因此在教學過程中適當融入了程序編寫與調試的任務,突破以汽車故障檢修為主的模式,有利于讓學生對智能化的本質有更加深刻的理解,也促進大學生科技創新。
在課前、課中、課后教學過程中,構建“1驅6環”教學情境。“1驅”即任務驅動,“6環”即學新知、下任務、定計劃、調代碼、評結果、拓視野。
1)學新知。本節課程的主要任務是完成基于Arduino的HC-SR04超聲波雷達測距系統的制作,課前首先要讓學生學會如何將示例程序燒寫到Arduino開發板中。通過網絡教學平臺發布學習資料,布置課前學習任務:熟悉Arduino開發板使用方法。
2)下任務。課上布置課堂任務:制作超聲波雷達測距系統。并給出具體功能需求:a)實現4m內測距,周期10ms;b)在上位機中實時顯示距離。
3)定計劃。定計劃主要體現在軟件架構設計中,對非軟件專業的高職學生而言有一定難度,將整個任務分解為圖3所示的子任務:
如圖4所示,教師采用類比法啟發學生,引入LED控制示例程序,將整個代碼分解為不同的功能模塊。通過學生分組討論,粗略完成程序架構設計。例如,在LED控制代碼中包括初始化設置,采樣周期設置以及核心功能等模塊,通過類比,在超聲波雷達測距程序中也包含相同的模塊,其中核心功能(獲取雷達數據和發送雷達數據)是重點和難點。
為解決重點和難點,體現“做中學”的思想,教師引出知識點:HC-SR04超聲波雷達的結構和測距原理。在知識點講授過程中使用教學平臺發布課堂問題:如何測量障礙物到超聲波雷達的距離?將學生回答情況納入學生評價體系中。通過學生的分組討論進一步細化軟件架構。
4)調代碼。通過上述環節,學生完成代碼架構設計,安排學生開始寫代碼,調試代碼,為學生提供所需的Arduino函數庫,學生根據需要選擇相應的函數。
5)評結果。學生完成代碼編寫后,燒錄到開發板中,檢查是否滿足功能。并安排學生分組展示成果,為每組的作品進行打分。
6)拓視野。由于簡易超聲波雷達測距系統測量數據沒有經過濾波處理,演示過程中,在上位機界面中會出現抖動現象,因此布置課后拓展任務,通過查找資料,選擇簡單的濾波方法消除這種現象。
②案例二。
完成上述任務后,學生理解了超聲波雷達信號的采集過程,通過制作實物,調動學生的學習興趣。那么超聲波雷達在實車上又是如何發揮作用的,因此以實車為載體設計了倒車輔助系統裝調任務,接下來闡述其教學實施過程。
在課前、課中、課后教學過程中,構建“1驅6環”教學情境。“1驅”即任務驅動,“6環”即學新知、下任務、定計劃、找問題、評結果、拓視野。
1)學新知。本節課程的主要任務是安裝倒車輔助系
統,需要學生具備基本的桑塔納汽車電路圖閱讀能力。通過網絡教學平臺線上發布學習資料,布置課前學習任務:學會識讀桑塔納倒車燈電路圖和認識倒車輔助系統。
2)下任務。課上布置任務:給一輛桑塔納3000加裝倒車輔助系統。功能需求:倒車時,倒車雷達和倒車攝像頭開始工作,中控顯示屏出現倒車影像。
3)定計劃。學生分組安裝傳感器、控制器和執行器。難點在于如何連接線束才能實現在倒車時,倒車雷達和倒車影像開始工作,因此學生需要繪制線束連接示意圖。
為解決難點,教師引入例子:倒車燈是如何工作的?啟發學生能否借鑒倒車燈的工作原理解決上述難點,安排學生分組討論。倒車燈只有在倒車時才會點亮,通過類比,可以借助倒車燈電路給雷達控制器供電,給倒車攝像頭供電,給顯示屏提供倒車信號。
4)找問題、做任務。學生分組完成線束連接示意圖繪制后,分組匯報,教師根據繪制情況打分并點評總結注意事項。每組完善線束連接方案后,進行導線的加工與連接。
5)評結果。教師根據倒車輔助系統功能是否正常、導線的處理與加工是否規范對每組進行評分。
6)拓視野。本次任務采用的方法是將超聲波雷達控制器、倒車攝像頭與倒車燈并聯,這樣做會增加倒車燈電路中的電流,布置課后拓展作業,查閱資料,分析這樣做是否會有安全隱患。
4 ?總結
智能網聯汽車是未來汽車發展的必然方向,培養適應汽車產業發展的新技能人才是關鍵。而人才的培養最終落實在課堂教學中,在汽車智能與網聯課程教學實施過程中,需要真正打破傳統的學科式的知識體系,以學生為主體,增強學生的參與感,突出“做中學”。同時還要突破傳統高職汽車專業以故障檢修為主的教學模式,適當融入編程和算法等要素,擴展學生的視野,提高學生的綜合素養。
參考文獻:
[1]李然,姚艷南,呂吉亮.高職院校智能網聯汽車專業建設方案探究[J].職業教育研究,2019(10):49-53.
[2]王仁群,單耀輝,李海霞.高職院校智能網聯汽車專業人才培養需求分析[J].時代汽車,2021(19):57-58.
[3]張宇峰.高職院校智能網聯汽車技術專業建設研究[J].內燃機與配件,2021(14):190-191.
[4]金重亮.智能網聯汽車實訓建設方案[J].時代汽車,2021(24):37-38.
[5]李祎承,蔡英鳳,王海.車輛工程專業智能網聯汽車課程改革研究[J].教育教學論壇,2020(51):165-167.
[6]郝慶民,蔡立峰.技工院校智能網聯汽車專業課程開發研究——以浙江交通技師學院為例[J].汽車實用技術,2020(13):231-232.