生物流體驅動系統及其仿生
2022-01-23 08:45:00王影杰劉思佳馬文星劉春寶
液壓與氣動 2022年1期
郝 歆, 王影杰, 劉思佳, 金 苗, 馬文星, 任 雷, 劉春寶
(1.吉林大學 機械與航空航天工程學院, 吉林 長春 130022;2.吉林大學 工程仿生教育部重點實驗室, 吉林 長春 130022; 3.曼徹斯特大學 機械航天和土木工程學院,英國 曼徹斯特)
引言
從細胞分裂和深海中自衛防御到節肢動物的快速運動,這些生物機理可以簡單地描述為利用流體壓力變化在密封空間中提供動力傳遞,這實際上是帕斯卡定律和液壓的基礎原理。許多生物體在體內或體外使用加壓液體來傳遞能量,擁有生物流體驅動系統。如蜘蛛部分關節使用液壓而不是肌肉來伸展步足[1],海星使用一種叫做水管系的系統和管足來移動[2]。此外,軟體動物、腔腸動物、脊索動物、蠕蟲和一些昆蟲幼蟲也利用流體驅動。依靠自然選擇, 生物流體驅動系統進化為高性能模式。
流體驅動是一項重要的工業技術,具有功率密度比大、輸出力和轉矩大、動態特性好、布置靈活、控制方式多樣化等優點[3-4]。這項技術已廣泛應用于機器人,如Atlas[5]、HyQ[6]和下肢外骨骼[7]。但目前的流體驅動系統普遍存在結構復雜、響應時間長、噪音大等問題。盡管機器人的泵、閥、缸等元件已經很緊湊和輕質,但仍然存在高能耗、低效率、體積和重量大等問題,流體驅動機器人尚有無限潛力。因此,有必要研究如何結合新技術、新理論、新方法來提高流體驅動系統的競爭力,并將其應用拓展到新的應用領域。
自然界流體驅動系統用很低的內部壓力實現了高效的驅動,對其開展仿生研究可為傳統流體驅動的高效率與功率質量比、結構緊湊、運動協調控制、穩定性、可靠性、環境友好性等方面的進一步優化提供參考。因此,以生物流體驅動系統為仿生模型,發現解決流體驅動問題和挑戰的新思路和新方法,為解決技術瓶頸提供重要的啟發,并有助于開發一種新型的仿生流體驅動系統。
1 生物流體驅動系統的種類
生物流體驅動系統可用于多種運動方式,如多足步行、蠕動爬行、噴射推進、洞穴挖掘等。這些生物驅動原理與許多肌肉驅動的生物體及仿生機器人完全不同。具體討論幾種典型的擁有流體驅動系統的動物,以闡明獨特的生物流體驅動系統如何實現生物功能,其流體驅動系統原理如圖1所示。
1.1 蜘蛛液壓關節步足行走
蜘蛛是典型的節肢動物,步足的7個關節中脛節-跗節和腿節-膝節關節是液壓關節,關節中沒有伸肌,關節膜內充滿液體,通過流體驅動力產生扭矩,使得關節伸展[8]。
蜘蛛的循環系統由血淋巴血管系統、復雜的腔和腔隙、中央泵送器官、心臟和動脈組成。傳動壓力的來源主要為前體,在關節伸展時,前體背腹肌肉收縮,血淋巴被壓縮進入步足中[9]。腔隙是血淋巴快速傳輸的通道,在關節轉動過程中,肌肉、動脈、神經和外骨骼之間的腔隙用來傳輸血淋巴到關節處或更遠的步足節段[10],如圖1a所示。蜘蛛身體和步足的壓力分布是循環所必需的,步足血淋巴壓力略高于前體,前體血淋巴壓力略高于后體,但差異不大[11],靜止與行走狀態的壓力有明顯差異。
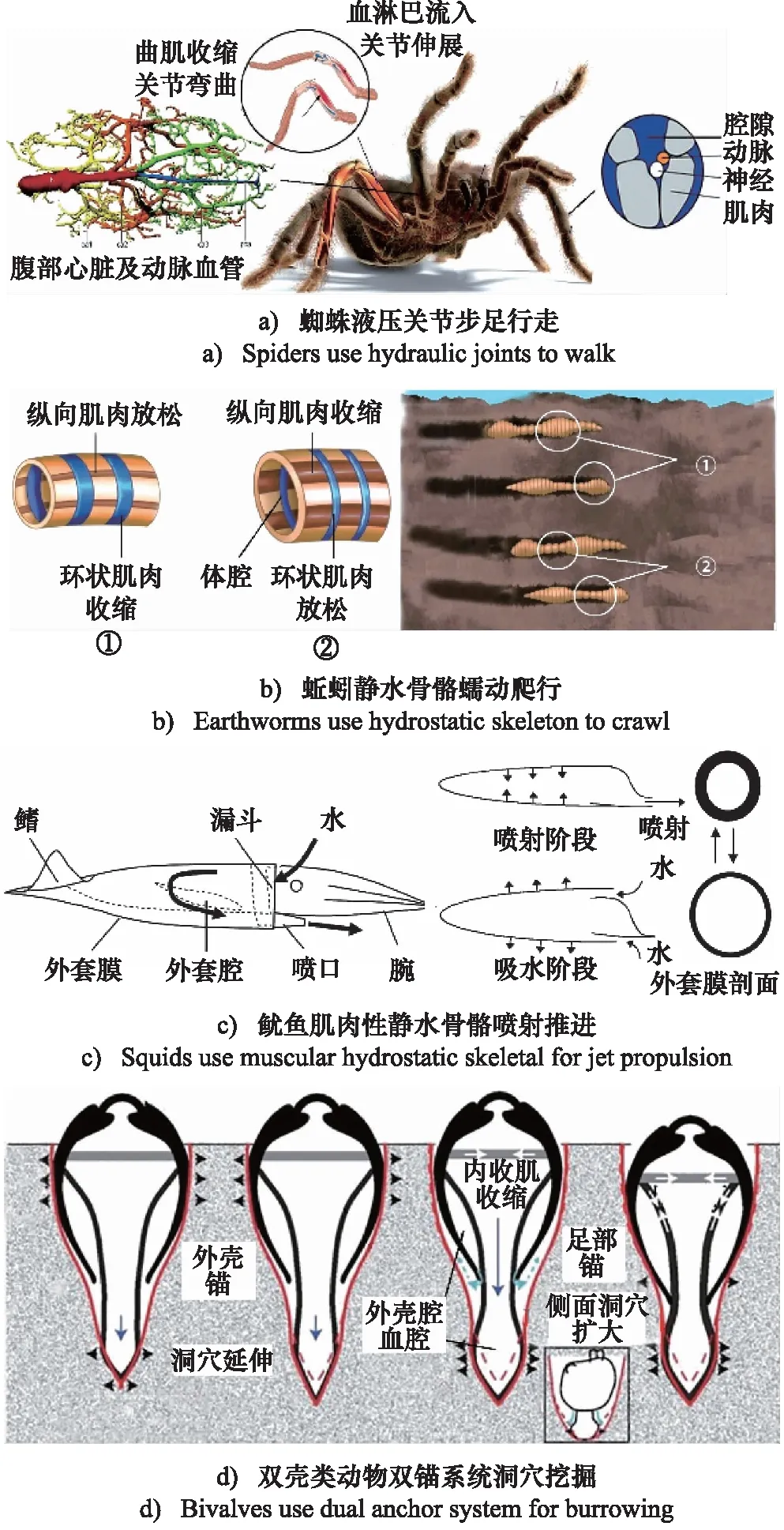
圖1 生物流體驅動系統原理圖
蜘蛛行動迅速[12-13],存在著高度的智能化,運動感知、實時反饋、快速控制來實現不同介質環境下的運動。作為尚未被徹底研究的智能閉環流體驅動系統,蜘蛛的生物流體驅動系統組織良好,控制精確,并具有快速調整以允許移動的能力,具有實時模式和理想模式之間的快速切換機制,以實現高效傳輸和移動,可以實現最低的能耗和最大的功能輸出。
1.2 蚯蚓靜水骨骼蠕動爬行
蚯蚓是典型的軟體動物,依靠帶有充液腔的靜水骨骼來支撐身體[14]。靜水骨骼以具有一定壓力的液體實現硬骨骼的支撐作用,具有支撐身體結構與進行柔性動作和輸出力的能力。這些靜水骨骼通常由環形肌和縱向肌組成圓柱形的身體。
蚯蚓有一個清晰的分段結構,稱為異界。每個節段都由隔膜隔開,有自己的離散充液腔,每個充液腔中包含了不可壓縮液體。如圖1b所示[15],蚯蚓的身體起著蠕動泵的作用,體液的體積不變,縱向肌肉的收縮會縮短其身體長度并增加其徑向直徑,而環狀肌肉的收縮會減小其徑向直徑并延長其身體長度[16]。蚯蚓通過利用其肌肉產生的收縮和擴張產生一種蠕動波,從尾部移動到頭部,用于移動和挖洞,這一過程類似于腸道的蠕動。
與硬的骨骼動物相比,擁有靜水骨骼的蚯蚓在運動時沒有剛性的關節角度變化,只是身體局部的尺寸有變化,可以用很少的肌肉實現運動自如。流線柔軟的圓柱形身體使蚯蚓有一個緩沖機制,保護內部器官以免受到沖撞,可以通過狹小的通道和更有效地逃跑、隱藏自己。
1.3 魷魚肌肉性靜水骨骼噴射推進
海洋動物和陸生動物驅動機制存在明顯的差異,陸地動物的機制表現為利用體內的壓力變化,工作介質是體液。而海洋動物的機制主要以噴射推進為基礎,其工作介質往往是周圍的水。
魷魚是自然界中最常見的噴射推進器,魷魚采用肌肉性靜水骨骼和一個大的充液腔來實現噴射推進,迅速實現高加速度[17]。魷魚外套膜由一圈環狀肌和連接內外被膜的縱向肌組成,外套膜自然圍成一個充液腔——外套腔。如圖1c所示[18],在噴射之前,噴口閉合,縱向肌收縮,外套膜變薄、膨脹,在外套腔內形成負壓,水流進入外套腔而實現充水。外套腔內充滿水后,噴口張開,環狀肌收縮,外套膜變厚,直徑縮小,將外套腔內的水噴出,使魷魚受到與水流方向相反的作用力,從而實現運動[19]。
魷魚對比普通魚類,即使在噴射速度小于周圍流體速度時,噴射推進也能產生推力。通過以較低的速度噴射較大質量的液體,從而獲得較高的推進效率[20];且頻率較低,推進噪聲極小。
1.4 雙殼動物雙錨系統洞穴挖掘
雙殼類動物依靠殼的開閉與腹部的射流推進實現緩慢運動。而當雙殼類動物穴居時,足部的充液腔在利用雙錨系統挖掘洞穴中起著重要作用[21-24]。
如圖1d所示,雙殼動物在挖洞時,當足探測和延伸時,打開的外殼起到錨的作用,而當外殼閉合向下拉入沉積物時,膨脹的足起到錨的作用。雙殼動物主要有2個獨立的充液腔:血腔和外套腔。外殼當錨時,雙殼打開,虹吸管閉合,足部橫向肌的收縮完成足部伸展。足部當錨時,內收肌收縮,血液進入足部的血腔,高壓力導致了典型的球根狀足部,這確保了足部作為一個安全的錨,在足部收縮肌縮回時,將外殼向下拉;外殼閉合,外套腔中壓力產生強大的水流,流體噴出通過松開鄰近的沙子來幫助外殼的運動。這種雙錨系統也描述了許多軟體穴居動物的行為[25]。
2 生物流體驅動系統的特征
2.1 系統構成
工程液壓系統主要由液壓泵(動力元件)、液壓缸/液壓馬達(執行元件)、液壓閥(控制元件)、油箱/蓄能器/過濾器/管道和熱交換器(輔助元件)等組成。根據不同種類生物流體驅動機理,推斷出生物流體驅動系統的存在需要3個必要的特征:動力源、腔體和工作介質。動力源類似于液壓泵,腔體類似于液壓缸,工作介質類似于液壓油。這一概念與流體驅動人工肌肉相似,后者包含可壓縮骨骼、柔韌皮膚和流體介質[26]。
生物流體驅動系統的動力源始終是肌肉。肌肉組織是精心安排的,以便可以控制腔體的直徑和長度。充液腔常見的肌纖維方向包括環狀肌、徑向肌和橫向肌[27]。此外,許多充液腔的壁是由結締組織纖維層加強的,這些纖維層可以控制和限制形狀變化[28]。環狀肌、徑向肌和橫向肌的收縮會使直徑減小,從而增加壓力,導致長度的增加。延伸后,縱向肌收縮,直徑再次擴大,從而使環狀肌、徑向肌和橫向肌再次伸長,從而導致縮短。因此,縱向肌和環狀肌、徑向肌和橫向肌以類似于節肢動物或脊椎動物關節兩側肌肉的方式起拮抗作用。
工作介質可包括血液、細胞內液或海水。通過工作介質,可以在生物體內產生流體傳動,如圖2所示,分別為貽貝中海水三維速度剖面的體內循環和外部循環[29],水母游泳時外部壓力的變化[30],蜘蛛步足內液體的流動[31]。液體工作介質具有不可壓縮性。
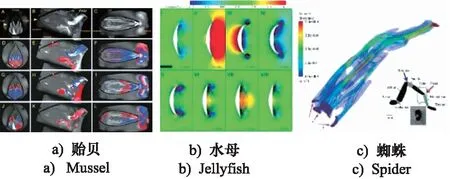
圖2 工作介質流動分布圖
腔體是流體驅動系統的重要標志。主要包括5種類型:節肢動物步足肌肉和血管包圍的腔體,稱為腔隙;昆蟲幼蟲的多功能器官消化腔,稱為腸管;頭足類、腹足類、雙殼類動物中包含的外套腔;其他軟體動物,稱為體腔或血腔;海洋動物的胃血管腔。封閉腔如體腔,體積沒有變化,一個方向伸長,必然有其他方向縮短。非封閉腔如外套腔,隨著工作介質體積的變化,腔體體積可能發生改變。
2.2 系統特點
生物體必須獲得最大的能量效率和最小的能量消耗才能生存,身體結構具有典型的輕量化特點,通常采用低壓產生高功率輸出。在生物流體驅動系統中,肌肉力壓縮腔體,使其變形。腔內的工作介質將力傳遞到另一側,產生變形并傳遞力。在此過程中動力的產生和傳遞是由肌肉、腔的大變形耦合在一起的。這一過程類似于工程液壓系統中液壓泵和執行元件的耦合效應。這種柔性驅動傳動一體化集成提供了高效的能量轉化與傳遞。
工程液壓系統的工作介質是液壓油,傳動性能要求其比黏度和抗氧化能力,有極低的降解率,因此液壓油泄漏會造成環境污染,工程液壓系統還會因為液壓泵容積交替時的壓力脈動產生一種獨特的流體噪聲,對環境產生負面影響。生物體能夠通過進食從環境中獲取能量,且一個生物體可以持續進行日常活動,而無需補充能量(進食)數天。同時在生物流體驅動系統中,生物體利用體液或體外的水作為工作介質,來自自然,不會產生有毒有害物質,既環保又廉價。運動過程中,頻率不高,往往噪音極小,充分體現環境友好性。
3 生物驅動傳動的仿生應用現狀
自然系統是技術創新和工程創造的靈感源泉。在生物流體驅動系統中,發現了許多有價值的功能,揭示生物流體驅動傳動、能量轉換的內在機理和規律,進而推動新概念、新思想的發現和仿生設計的創造。
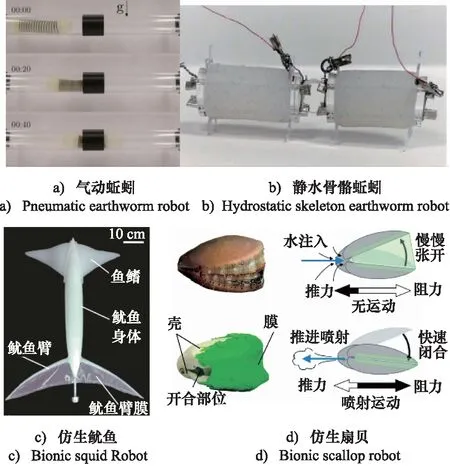
圖3 常見氣動與液動仿生柔性機器人
由于受到能源、動力、材料和制造方式的限制,現代機器人缺乏驅動、傳動、傳感和儲能等功能的集成,因此無法復制它們的效率和自主性。軟材料具有剛度小、柔順性高等特點[35],可在大范圍內任意改變自身形狀、尺寸,使軟體機器人擁有更安全的人機交互方式和自適應運動,但在自主和無約束運動中,實現驅動、速度和便攜之間的性能權衡,仍然存在重大挑戰。
2016年,哈佛大學的研究人員成功研制出了一款全柔性的Octobot機器人,如圖4a所示,是首例完全由柔性材料組成的自主、無約束仿生章魚機器人。該機器人由微流體邏輯控制,可以自動調節流體流動。燃料分解產生的氣體使流體通道膨脹,從而產生驅動。流體和彈性體結構為完全柔軟、自主的機器人奠定了基礎[36]。2019年,AUBIN C A等[37]將驅動、液壓動力傳輸和能量存儲功能嵌入到無約束的水生軟機器人中,提高未來機器人的自主性、效率和多功能性,如圖4b所示。

圖4 其他流體仿生柔性機器人
2021年,浙江大學李鐵風教授團隊開發了一種用于深海探索的自主軟機器人,如圖4c所示,該機器人將動力、控制和驅動在柔性基質中集成,機器人在馬里亞納海溝深度達到10900 m,在中國南海3224 m深的地方自由游泳,實現了在極端條件下設計柔軟、輕便設備的潛力[38]。2021年,浙江大學團隊依據蜘蛛心臟利用管狀心臟將血淋巴泵到足部,從而驅動足部關節伸展機理,開發了一類完全軟電子泵,證明軟泵作為自由軟機器人通用電源的廣闊潛力,如圖4d所示[39]。同時,該團隊開發了一類軟體電動流體驅動器(SEFAs),直接將電能轉化為驅動器的機械能,通過電響應流體驅動外部彈性體變形,如圖4e所示。SEFAs在便攜性、可控性、驅動性、通用性、安全性和快速響應等方面表現出優異的綜合性能[40]。仿生物系統的集成性和自主特性,為柔性機器人領域帶來了革命性的變化,擁有更安全的人機交互方式和無約束運動能力。
4 仿生研究的發展趨勢
隨著仿生學科熱度越來越高,仿生機器人從單純的結構仿生[41],發展到功能仿生[42]、功能表面仿生,再到如今進一步發展到感知仿生、智能仿生。基于生物學原理,仿生機器人集成力覺、觸覺、視覺、嗅覺、聽覺等感知系統,獨立完成信息感知-信號傳遞-信息處理,可實現仿生感知、人機交互系統與智能控制原理的有機結合。
4.1 驅動系統環境友好化
(1) 驅動效率高:利用體內或體外的液體來進行各種活動,通常采用低壓產生高功率輸出,實現低速但高效的驅動模式;
(2) 無污染:驅動系統所采用的工作介質與生活環境中的工作介質相同,如用過濾后的淡水或海水代替礦物油作為系統工作介質。因此, 系統在工作介質的排放過程中不會污染環境,而是會使介質回到原來的環境中。
4.2 柔性驅動傳動系統集成一體化
(1) 肌肉和流體之間的相互作用對機器人的運動能力起著決定性的作用。相互作用過程中涉及的結構、材料、密封、振動、噪聲抑制機制等方面的研究,對于不同的工程需要,都是值得深入研究的課題。
(2) 驅動、傳動、控制一體化是仿生機器人的不斷追求。隨著仿生學、智能制造、智能材料的不斷發展,這種集成技術可以通過新的制造方法將柔性驅動器,柔性閥、柔性傳感系統和流體集成在一起,使系統具有體積小、重量輕、能耗低、可靠性高和智能化的特點。
4.3 智能化和高性能化
擁有智能自主系統的機器人是航空航天、軍事、醫療和工業發展的不斷需求。如圖5所示[43],利用柔性驅動器、柔性傳感器、柔性泵、柔性閥和信息處理與控制等進行智能化機器人系統集成。尤其是仿生柔性機器人涉及到仿生學、材料學、機械和力學等多學科交叉,以及仿生設計、智能制造、材料、電子、傳感、能源、多模態動作和智能控制等技術融合,向高性能和智能化方向不斷發展。
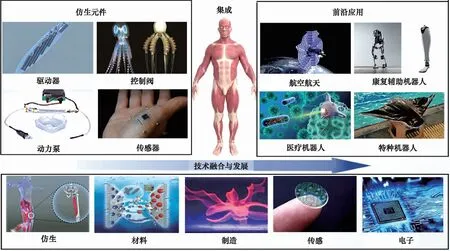
圖5 機器人的融合與發展
5 結論
本研究綜述了典型的流體驅動的生物和運動原理,總結了生物流體驅動系統存在的3個基本特征,即動力源、腔體和工作介質。同時總結了生物流體驅動系統的特點,結合特征和特點討論了流體驅動系統仿生應用,并總結和探討了仿生生物柔性機器人驅動系統環境友好化和柔性驅動傳動系統集成一體化的自主性趨勢,為仿生物機器人發展的提供新方向和新思路。
猜你喜歡
天天愛科學(2022年9期)2022-09-15 01:12:54
工業設計(2022年8期)2022-09-09 07:43:20
天天愛科學(2022年4期)2022-05-23 12:41:48
當代水產(2022年3期)2022-04-26 14:26:56
科學大眾(2021年9期)2021-07-16 07:02:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
軍事文摘(2020年20期)2020-11-28 11:42:50
航空世界(2020年10期)2020-01-19 14:36:20
裝備制造技術(2019年12期)2019-12-25 03:06:46
