絞車型升沉補償模擬試驗臺虛擬樣機
2022-01-23 08:45:04肖體兵劉建群張永康鄒大鵬
液壓與氣動 2022年1期
關鍵詞:信號
周 強, 肖體兵, 劉建群, 張永康, 鄒大鵬
(廣東工業大學 機電工程學院, 廣東 廣州 510006)
引言
升沉補償系統作為海上浮式作業平臺(如鉆井平臺、風電安裝船、CTV船)進行浮式作業必不可少的裝備之一,可減少占用作業平臺空間,并且補償行程不限,是很有應用前景和研究意義的一種新型升沉補償系統[1-2]。考慮到絞車型升沉補償系統研制成本高,難以搭建全尺寸模型試驗臺,根據相似原理,課題組搭建了簡化版絞車型升沉補償模擬試驗臺[3]。然而,搭建的試驗臺許多參數已固定且每次試驗耗時耗力,不便開展更進一步研究,虛擬樣機的出現很好地彌補了物理樣機的不足[4]。
虛擬樣機能真實地模擬復雜系統的工作過程,可大幅降低產品研制費用和縮短產品研制周期[5-6]。為對升沉補償絞車各方面的特性進行深入而詳細的研究,絞車型升沉補償模擬試驗臺虛擬樣機的搭建將有助于進一步優化系統的設計參數和控制器。絞車型升沉補償模擬試驗臺結構復雜,存在多學科交叉融合問題,使用單一軟件很難準確建立其仿真模型,基于多軟件聯合仿真的虛擬樣機技術為這類問題提供了有效解決手段[7]。
Simcenter 3D motion軟件支持機械結構的動力學建模,相對于傳統動力學分析軟件ADAMS[8-10],其與AMESim的聯合仿真接口更加友好。本研究擬根據已有的絞車型升沉補償模擬試驗臺,利用不同軟件的各自優勢,在Simcenter 3D motion,AMESim和Simulink 3個軟件中分別搭建模擬試驗臺的不同模塊,并基于接口實現聯合仿真,建立整個試驗臺的虛擬樣機模型。最后將虛擬樣機仿真結果與模擬試驗臺的試驗結果進行對比分析,驗證虛擬樣機模型的準確性,為下一步改進絞車型升沉補償系統的設計參數和控制策略,提高補償進度提供驗證平臺。
1 絞車型升沉補償模型試驗臺
絞車型升沉補償模型試驗臺包括升沉運動模擬子系統、鉆柱負載模擬子系統和升沉補償絞車模擬子系統,如圖1所示為絞車型升沉補償模擬試驗臺。升沉運動模擬子系統為哈爾濱工業大學研制的液壓六自由度運動模擬平臺。用戶可通過運行于上位機的監控程序發布各種命令,并查看當前運動模擬器的運行狀態及參數。鉆柱負載模擬子系統由質量塊、彈簧、連接板組成,質量塊的質量可模擬鉆柱質量,彈簧的彈性可模擬鉆柱彈性,連接板之間連接不同數量或剛度的彈簧可用于模擬不同深度的鉆柱[11]。升沉補償模擬子系統的硬件組成主要包括工控機、采集卡、伺服電機、 變量泵、定量馬達、絞車、傳感器等。
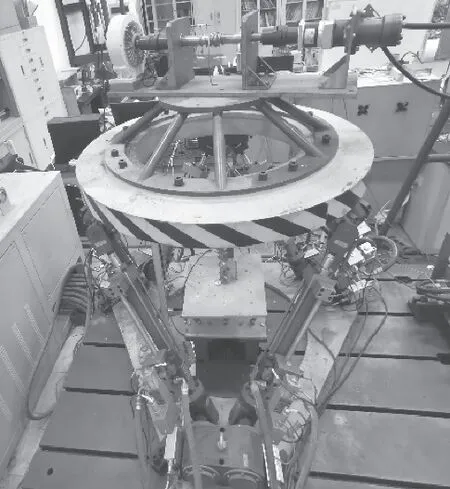
圖1 絞車型升沉補償模擬試驗臺
絞車型升沉補償模擬試驗臺的原理如圖2所示,六自由度平臺在6個液壓缸的驅動下產生升沉運動,位移傳感器1檢測平臺升沉運動,位移傳感器2檢測模擬負載升沉運動,轉速編碼器檢測絞車轉速,將收集到的3個傳感器的信號發送至工控機,經控制系統計算后分別向伺服電機、變量泵輸出控制電壓信號,實時調節伺服電機轉速和變量泵排量,控制定量馬達的轉速和轉向,最終使模擬負載的升沉位移保持在一定范圍內,實現升沉補償[12]。
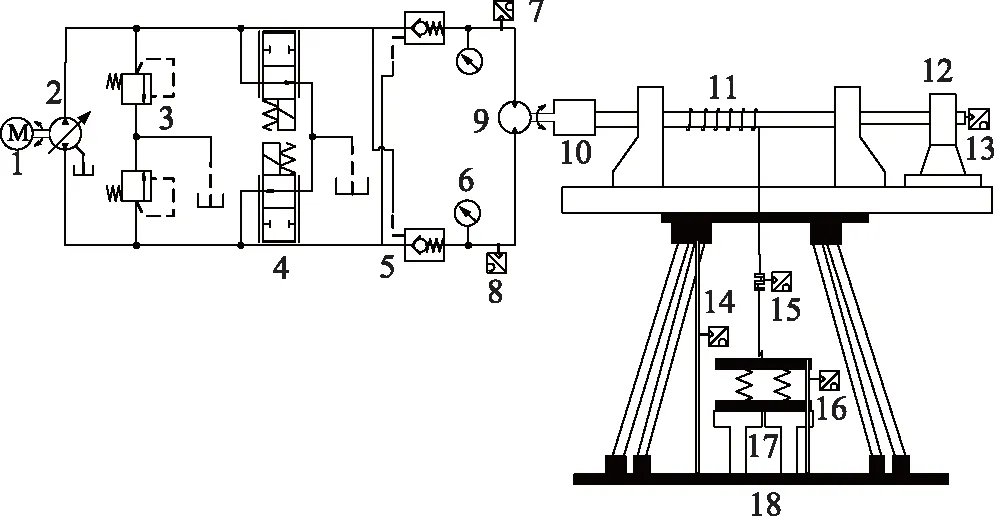
1.伺服電機 2.變量泵 3.溢流閥 4.電磁球閥 5.液控單向閥 6.壓力表 7.壓力傳感器1 8.壓力傳感器2 9.雙向馬達 10.減速器 11.絞車 12.磁粉制動器 13.轉速編碼器 14.位移傳感器1 15.拉力傳感器 16.位移傳感器2 17.質量塊 18.六自由度平臺
2 試驗臺虛擬樣機聯合仿真方案
絞車型升沉補償模擬試驗臺結構復雜,涉及多個學科,基于接口的多軟件聯合仿真的方式可實現其虛擬樣機的搭建。在本研究中,3個軟件并行運行,虛擬樣機的各個模塊在不同的軟件中使用各自的求解器進行計算,然后通過接口實現實時數據交換,從而實現3個軟件的聯合仿真。實現各軟件間通訊的接口設置是影響聯合仿真成敗的關鍵。首先在Simcenter 3D motion中建立控制輸入、輸出的端口信息,求解并導出MCOSIM類型的聯合仿真接口文件;其次,在AMESim中點擊導入Simcenter 3D motion的模型接口文件并生成接口模塊,即可實現Simcenter 3D motion與AMESim的信息交互,然后創建SimuCosim接口模塊,連線后進入仿真模式即可生成MATLAB Mex類型的聯合仿真接口文件; 最后,打開主仿真平臺MATLAB/Simulink,創建與AMESim的聯合仿真的AME2SLCoSim模塊并鏈接到上一步生成的接口文件,連線后啟動仿真,即可實現在本方案中的3個軟件的聯合仿真。
絞車型升沉補償模擬試驗臺的虛擬樣機可分為4個模塊,圖3所示為不同模塊間關鍵信號的傳遞路徑,表1所示為關鍵信號的具體含義。在本研究中,位于Simulink中的指令輸入模塊用于輸入六自由度平臺的期望位姿和期望的鉆柱負載的位移量。主控制器模塊在Simulink實現,用于編寫六自由度平臺的逆解算法和直驅容積控制的算法。液壓控制系統模塊在AMESim中建模,六自由度平臺的液壓系統以及用于升沉補償的泵控馬達系統將在此處搭建完成。多體動力學分析模塊在Simcenter 3D motion中建模,包括液壓六自由度平臺的動力學模型和鉆柱負載模擬系統的動力學模型。
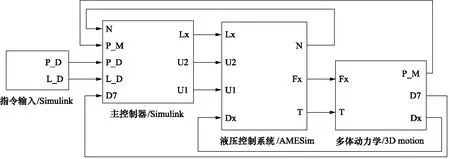
圖3 聯合仿真軟件間信號傳遞簡易方案
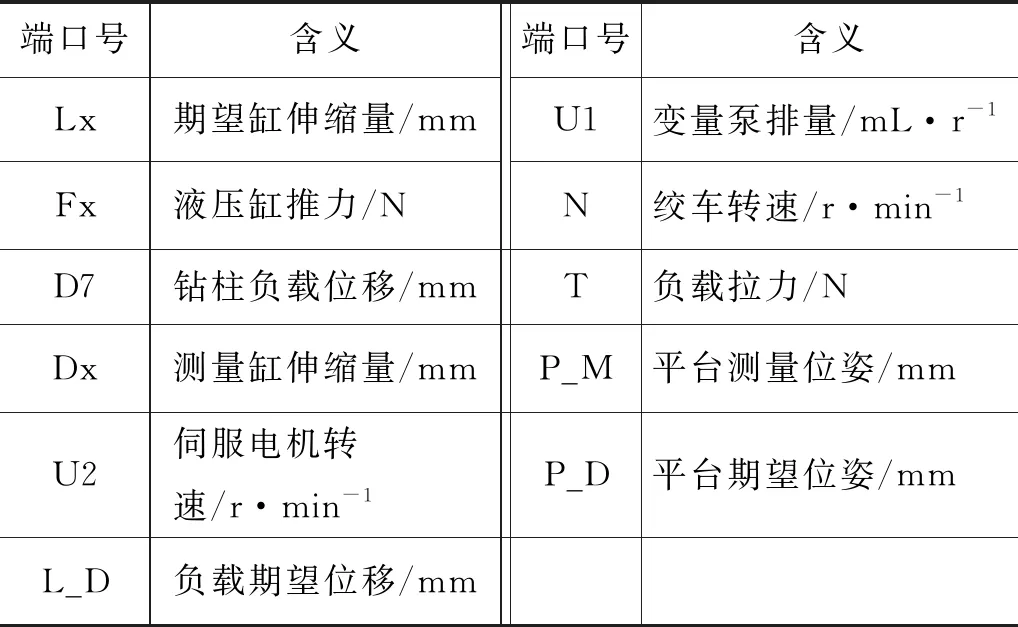
表1 傳遞信號含義(x=1~6)
3 試驗臺虛擬樣機各模塊的搭建
3.1 多體動力學模塊的建模
多體動力學模塊在Simcenter 3D motion中搭建完成,該模塊可為3個部分,分別是用于模擬升沉運動的液壓六自由度平臺,模擬鉆井鉆柱的負載模塊以及絞車型升沉補償模塊,如圖4所示。
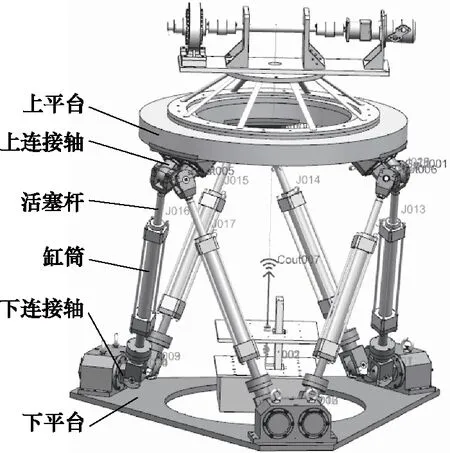
圖4 多體動力學分析模塊
液壓六自由度平臺的主要組成部分包括上平臺、下平臺、上連接軸、下連接軸、缸筒、活塞桿等。添加運動副后,平臺整體自由度為6[13]。下平臺固定于地面,通過軟件接口,6個液壓缸接收力信號并返回伸縮運動信號,上平臺即可產生升沉運動。負載模塊主要由上連接板、下連接板和質量塊組成,上板與下板之間添加有帶阻尼的彈簧連接器,通過軟件接口,上板接收拉力并返回升沉運動信號。設置好材料屬性后,軟件即可自動計算出各組成部分的質量,表2所示為動力學模塊主要參數表。
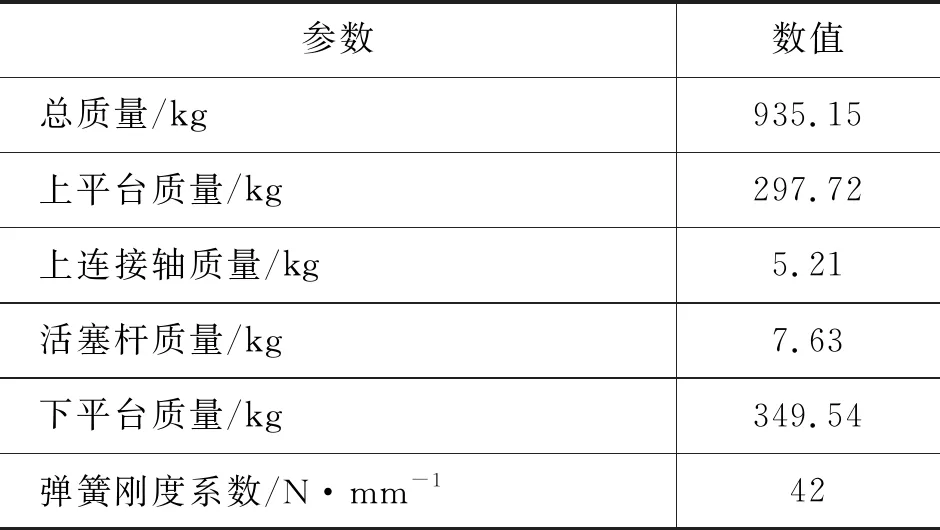
表2 動力學模塊主要參數
3.2 液壓控制系統模塊的建模
在AMESim中完成液壓控制系統模塊的建模,如圖5所示, 仿真模型的主要參數設置如表3所示。上部分用于實現絞車型升沉補償的泵控馬達系統,下部分用于升沉運動模擬的六自由度平臺的液壓系統,與其他模塊信息交互的主要信號含義如表1所示。在六自由度平臺的液壓系統中,6個液壓缸接收多體動力學模塊傳來的伸縮運動信號并返回對活塞桿的推力,主控制器模塊計算出的期望伸縮量與多體動力學模塊返回的實際伸縮量形成PID閉環控制。此外,接收多體動力學模塊傳來平臺的6個位姿信號并輸出到Simulink主控制器模塊,以便實時查看平臺測量位姿。在泵控馬達系統中, 當接收到多體動力學模塊的平臺升沉信號時,將產生對鉆柱負載系統的拉力信號并返回鉆柱升沉運動信號,同時,將平臺升沉運動、絞車轉速、鉆柱負載升沉信號作為輸入傳遞給Simulink主控制器模塊,并返回變量泵排量電壓與伺服電機轉速電壓信號,實現雙變量控制泵控馬達調速系統。
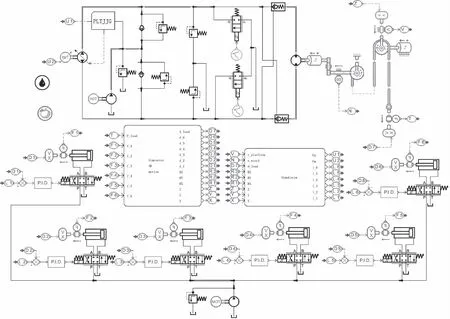
圖5 液壓控制系統模塊
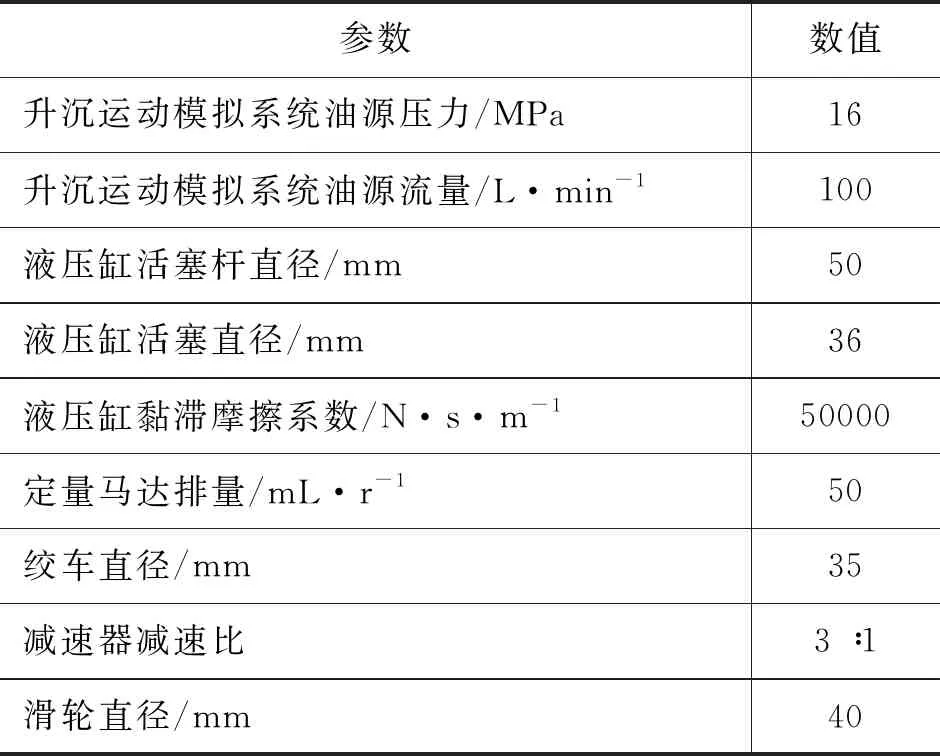
表3 仿真模型主要參數設置
3.3 主控制器模塊的建模
主控制器模塊在MATLAB/Simulink中搭建完成,如圖6所示。當輸入平臺期望位姿時,控制模塊計算出6個液壓缸的期望伸縮量,即六自由度平臺的逆解[14-15],并將該信號值通過接口傳遞給AMESim液壓控制系統模塊。同時, 控制器接收來自AMESim的平臺升沉運動、絞車轉速、負載升沉信號,并輸出變量泵排量、伺服電機轉速控制信號。負載位移在最外環做反饋PID控制,位移偏差計算產生的速度值與平臺實時升沉速度的和作為前饋,由雙變量直驅馬達泵控系統跟蹤,該值的正負將影響變量泵排量的正負及增益,此外,絞車轉速將與計算出的實時期望轉速做內環PID控制。仿真時,按試湊法逐步調節PID的比例、積分、微分系數進行優化,如表4所示為主控制器主要參數的設置。雙變量控制策略實現了升沉補償系統的正反轉要求,使排量控制更加平穩,又充分利用了伺服電機控制的快速性和穩定性[12]。

圖6 主控制器模塊
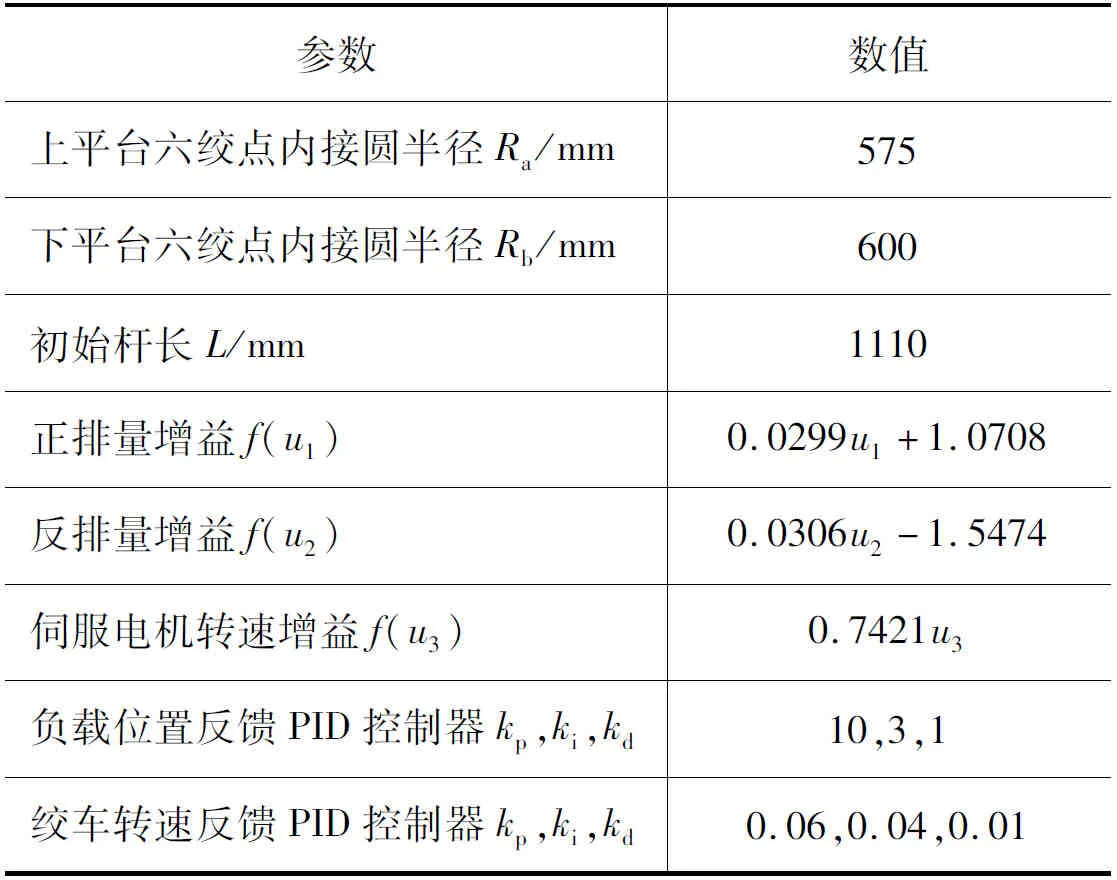
表4 主控制器主要參數設置
4 仿真結果與試驗對比分析
對仿真系統與試驗系統的平臺給定同樣的幅值為30 mm,周期為5 s的正弦期望升沉運動信號,且仿真模型的有關參數與試驗臺的設置參數基本一致。仿真與試驗結束后,整理數據并繪圖。圖7所示為平臺升沉運動跟蹤性能對比曲線,圖8所示為升沉補償性能對比曲線,圖9所示為六自由度平臺中某一液壓缸中活塞桿所受推力對比曲線,圖10為模擬負載所受拉力對比曲線,圖11為補償絞車轉速對比曲線。
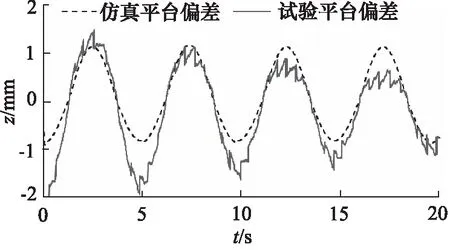
圖7 平臺升沉運動跟蹤性能
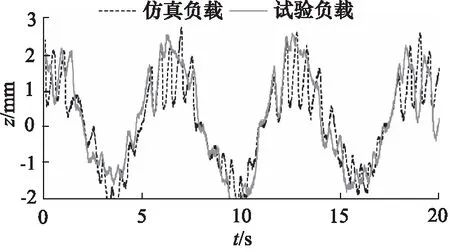
圖8 升沉補償性能

圖9 活塞桿所受推力
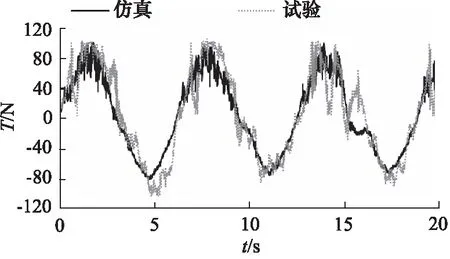
圖10 模擬負載所受拉力
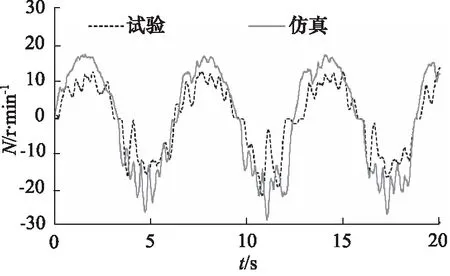
圖11 補償絞車轉速
由平臺升沉運動跟蹤性能對比曲線可知,仿真平臺與試驗平臺跟蹤升沉運動均存在少許滯后,但與期望升沉運動信號的偏差維持在較低水平且基本保持一致;由升沉補償性能對比曲線可知,仿真與試驗系統的升沉補償系統均有效且補償性能大體一致;由活塞桿所受推力對比曲線可知,仿真值與試驗值的變化趨勢一樣,但前者明顯大于后者。之所以如此,主要原因是聯合仿真時液壓缸的黏滯摩擦系數必須設置為較大值,否則聯合仿真振蕩劇烈,甚至導致仿真失敗。此外,與使用一個軟件仿真相比,聯合仿真中各軟件間數據交換總是存在一個仿真步長的延遲,這是聯合仿真技術有待解決的一個難題,可能也是造成仿真系統易振蕩甚至失敗的原因。由模擬負載所受拉力對比曲線、補償絞車轉速對比曲線可知,仿真模型與試驗實測中負載所受拉力、補償絞車轉速均存在一定抖動,但基本保持一致。
綜上,從最終效果上來看,所建立絞車型升沉補償模擬試驗臺虛擬樣機是準確的,仿真模型中平臺能很好地跟蹤期望平臺運動,雙變量控制升沉補償系統有效,并且平臺跟蹤性能與補償特性與試驗實測大體一致。
5 結論
本研究聯合Simcenter 3D motion、AMESim和MATLAB/Simulink 3個軟件搭建了絞車型升沉補償模擬試驗臺的虛擬樣機。仿真與試驗結果表明,所搭建的絞車型升沉補償模擬試驗臺虛擬樣機是準確的,能較真實地反映絞車型升沉補償模擬試驗臺物理樣機,為進一步優化絞車型升沉補償系統的設計參數和控制策略,提高補償精度提供了很好的驗證平臺。該虛擬樣機搭建方法也為其他復雜機電液系統的仿真提供有益參考。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
