深中通道管節(jié)寄放區(qū)整平施工輔助決策系統(tǒng)研究
2022-01-24 07:11:40雷鵬
中國港灣建設(shè) 2021年12期
雷鵬
(1.交通運(yùn)輸部天津水運(yùn)工程科學(xué)研究所,天津 300456;2.天津水運(yùn)工程勘察設(shè)計(jì)院,天津 300456;3.天津市水運(yùn)工程測繪技術(shù)重點(diǎn)實(shí)驗(yàn)室,天津 300456)
0 引言
深中通道項(xiàng)目沉管段具有超寬、變寬、深埋、回於量大、挖砂坑區(qū)域地層穩(wěn)定性差五大技術(shù)難點(diǎn),是目前為止世界上技術(shù)難度最大的建設(shè)工程之一[1]。深中通道沉管隧道東段管節(jié)在預(yù)制完成后,需要浮運(yùn)至指定位置坐底寄放,管節(jié)寄放區(qū)基礎(chǔ)處理是關(guān)鍵施工環(huán)節(jié)[2-3]。此前在附近區(qū)域采用類似工藝的港珠澳大橋沉管隧道項(xiàng)目中,基床整平采用的“津平一號(hào)”是國內(nèi)首創(chuàng)、港珠澳大橋島隧工程獨(dú)有的平臺(tái)式拋石整平船。該整平船插樁就位在設(shè)計(jì)位置后,其主體部分位于水面以上,控制水下整平高程的拋石管與RTKGPS設(shè)備剛性連接,較易獲取用于指導(dǎo)水下整平施工的高精度高程數(shù)據(jù),具有高程數(shù)據(jù)獲取直接的優(yōu)點(diǎn),可以實(shí)現(xiàn)水深10耀50 m范圍內(nèi)碎石鋪設(shè)整平,在工程中取得了良好的應(yīng)用效果[4-5],但相應(yīng)的裝備結(jié)構(gòu)復(fù)雜,成本較高。
深中通道沉管隧道東段管節(jié)寄放區(qū)整平施工采用完全水下作業(yè)模式的水下整平機(jī),該作業(yè)模式具有建造成本低、作業(yè)效率高等優(yōu)勢,但由于沒有剛性出水結(jié)構(gòu),無法直接使用RTKGPS高程,高程精度控制更加困難[6-7]。以壓力傳感器為核心的柔性高程傳遞技術(shù),能夠基于分別安裝在驗(yàn)潮站水下控制點(diǎn)和整平機(jī)的壓力傳感器實(shí)時(shí)水壓力差,將水下控制點(diǎn)高程遠(yuǎn)程傳遞至整平機(jī)上的壓力傳感器。但該方法涉及的傳感器數(shù)量多,數(shù)據(jù)融合復(fù)雜,且整平施工現(xiàn)場對(duì)數(shù)據(jù)實(shí)時(shí)展示和整平數(shù)據(jù)管理都有較高要求,為此研發(fā)了深中通道管節(jié)寄放區(qū)整平施工輔助決策系統(tǒng)(以下簡稱輔助決策系統(tǒng))。文章介紹了整平施工測控技術(shù)方案,剖析了輔助決策系統(tǒng)架構(gòu)和主要功能模塊,并給出了在深中通道管節(jié)寄放區(qū)整平施工中的實(shí)際應(yīng)用案例。
1 測控技術(shù)方案
深中通道管節(jié)寄放區(qū)整平施工測控系統(tǒng)主要包括:平面定位、整平機(jī)水下高程監(jiān)測和輔助決策系統(tǒng)3部分。
1)平面定位
平面定位系統(tǒng)用于獲取整平機(jī)在水下的平面位置及姿態(tài),以引導(dǎo)整平機(jī)至設(shè)計(jì)位置精確就位,并監(jiān)測其在鋪石過程中的水平位置偏移,以保證整平機(jī)始終位于設(shè)計(jì)整平范圍內(nèi)。為了適應(yīng)整平機(jī)的完全水下作業(yè)模式,整平機(jī)水下實(shí)時(shí)平面坐標(biāo)通過安裝在整平機(jī)上的4個(gè)水下聲學(xué)定位信標(biāo)獲取。
2)整平機(jī)水下高程監(jiān)測
水下監(jiān)測系統(tǒng)包括安裝在整平機(jī)上的4個(gè)壓力傳感器,以及安裝在移動(dòng)料斗上的測深儀和聲速計(jì)。壓力傳感器是系統(tǒng)實(shí)現(xiàn)柔性高程傳遞的核心(圖1),測深儀則用于在料斗移動(dòng)過程中監(jiān)測整平后的基槽高程,實(shí)現(xiàn)整平質(zhì)量檢測。上述各設(shè)備的輸出數(shù)據(jù)均通過網(wǎng)絡(luò)實(shí)時(shí)傳輸至整平作業(yè)指揮室中的整平施工輔助決策系統(tǒng)軟件,進(jìn)行集中處理分析[8]。
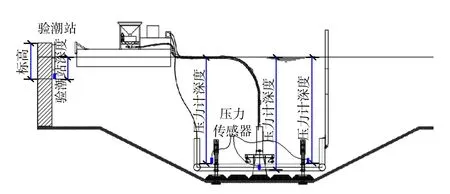
圖1 基于壓力傳感器的柔性高程傳遞方法Fig.1 Flexible elevation transference method based on pressure sensor
3)輔助決策系統(tǒng)
輔助決策系統(tǒng)在常規(guī)海洋工程施工導(dǎo)航定位功能基礎(chǔ)上,進(jìn)一步針對(duì)實(shí)時(shí)水下高程數(shù)據(jù)這一核心,融合壓力傳感器、水下聲學(xué)定位信標(biāo)、傾斜儀和測深儀等設(shè)備數(shù)據(jù),按照數(shù)據(jù)解析、數(shù)據(jù)融合、數(shù)據(jù)管理的處理流程,以二維平面電子地圖、三維虛擬場景、動(dòng)態(tài)數(shù)據(jù)曲線等多種手段將整平施工關(guān)鍵參數(shù)直觀地呈現(xiàn)給現(xiàn)場指揮和操作人員。
2 輔助決策系統(tǒng)研發(fā)
輔助決策系統(tǒng)采用C#面向?qū)ο箝_發(fā)語言,系統(tǒng)中所涉及的船舶、整平機(jī)及各個(gè)設(shè)備等多個(gè)要素具有典型的面向?qū)ο筇卣鳎到y(tǒng)應(yīng)用面向?qū)ο笏枷朐O(shè)計(jì)整個(gè)系統(tǒng)的內(nèi)部結(jié)構(gòu),抽象得到具有不同屬性和行為的“類”,使系統(tǒng)的內(nèi)部結(jié)構(gòu)更加清晰合理[9]。同時(shí)通過廣泛應(yīng)用設(shè)計(jì)模式,系統(tǒng)具有更強(qiáng)的代碼可讀性,更加清晰的設(shè)計(jì)思路,以及更強(qiáng)的可擴(kuò)展性,方便未來伴隨需求的增加擴(kuò)充功能[10]。系統(tǒng)用戶界面基于微軟新一代圖形系統(tǒng)WPF技術(shù)開發(fā)實(shí)現(xiàn),WPF運(yùn)行在.NET Framework 3.0及以上版本下,為用戶界面、2D/3D圖形、文檔和媒體提供了統(tǒng)一的描述和操作方法[11]。系統(tǒng)在開發(fā)過程中,充分運(yùn)用了WPF技術(shù)中的數(shù)據(jù)綁定、屬性依賴等技術(shù)特征,有效提升了用戶體驗(yàn)。
輔助決策系統(tǒng)按照功能可以劃分為常規(guī)導(dǎo)航定位、整平參數(shù)設(shè)計(jì)與就位、整平施工監(jiān)測和整平數(shù)據(jù)組織管理4個(gè)模塊,各個(gè)模塊之間的交互關(guān)系如圖2所示。
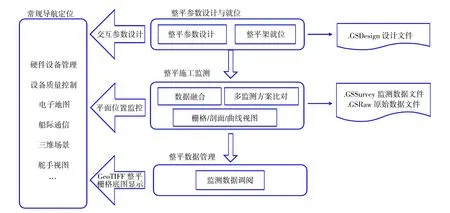
圖2 輔助決策系統(tǒng)模塊結(jié)構(gòu)圖Fig.2 Module structure diagram of the decision support system
2.1 常規(guī)導(dǎo)航定位部分
整平施工作業(yè)區(qū)域按照精確設(shè)計(jì)的整平幅進(jìn)行逐幅精細(xì)化整平施工,整平施工船及整平機(jī)的實(shí)時(shí)精確位置是指導(dǎo)現(xiàn)場施工的重要信息,常規(guī)導(dǎo)航定位是系統(tǒng)針對(duì)這一需求的基礎(chǔ)功能模塊,用于引導(dǎo)現(xiàn)場指揮人員將整平機(jī)放置在設(shè)計(jì)位置以及整平過程中整平施工船、整平機(jī)等目標(biāo)的平面位置監(jiān)控。
系統(tǒng)基于WPF技術(shù)中的圖形繪制接口,通過WPF技術(shù)的動(dòng)畫、依賴屬性等最新特性,從底層實(shí)現(xiàn)了輕量級(jí)電子地圖引擎,支持多種地理信息交換格式數(shù)據(jù)的讀寫,通過工作區(qū)-地圖集-圖層等概念對(duì)空間數(shù)據(jù)進(jìn)行分層管理,在空間索引的支持下實(shí)現(xiàn)空間數(shù)據(jù)集的高效率、高質(zhì)量渲染,以及地理信息應(yīng)用中常規(guī)的地圖漫游、空間查詢、屬性查詢等功能,實(shí)現(xiàn)了生動(dòng)高效的圖形展示和方便快捷的地圖操作[12-13]。系統(tǒng)內(nèi)置AutoCAD的DXF數(shù)據(jù)、GeoTIFF柵格影像等常用文件格式的支持,方便用戶在整平施工過程中及時(shí)將整平設(shè)計(jì)位置、高程異常點(diǎn)、三維地形暈渲影像等不同類型的數(shù)據(jù)集成進(jìn)來,為整個(gè)系統(tǒng)的實(shí)現(xiàn)提供空間數(shù)據(jù)展現(xiàn)基礎(chǔ)。
為了實(shí)現(xiàn)整平現(xiàn)場整平施工船和整平機(jī)的實(shí)時(shí)精確定位,需要在各個(gè)目標(biāo)上安裝GNSS、姿態(tài)傳感器、水下聲學(xué)定位信標(biāo)等多種設(shè)備,以實(shí)時(shí)獲得目標(biāo)的精確位置、姿態(tài)等信息。系統(tǒng)的硬件設(shè)備管理模塊實(shí)時(shí)接入硬件設(shè)備,根據(jù)接入設(shè)備的不同類型,按照其指定的數(shù)據(jù)格式從原始數(shù)據(jù)中解析出絕對(duì)地理坐標(biāo)、相對(duì)坐標(biāo)、姿態(tài)角度等信息,并融合計(jì)算出用于整平機(jī)位置監(jiān)測的各項(xiàng)指標(biāo)。
2.2 整平參數(shù)設(shè)計(jì)與就位
整平參數(shù)設(shè)計(jì)需要結(jié)合整平幅位置坐標(biāo)、艏向、傾斜角度、尺寸、整平壟數(shù)量等信息綜合考慮。系統(tǒng)采用AutoCAD中DXF文件的形式,借助AutoCAD強(qiáng)大的圖文編輯功能適應(yīng)靈活多變的設(shè)計(jì)參數(shù)需求。同時(shí)在電子地圖的支持下,以鼠標(biāo)點(diǎn)選等友好的人機(jī)交互方式實(shí)現(xiàn)可視化整平設(shè)計(jì)。設(shè)計(jì)參數(shù)保存在自定義的.GSDesign文件中供后續(xù)調(diào)用。
整平機(jī)就位時(shí),需要將整平機(jī)精確導(dǎo)引至設(shè)計(jì)文件中的設(shè)計(jì)位置,在滿足系統(tǒng)的水平定位精度要求后,緩慢坐底,開始整平作業(yè)。在粗略就位階段,系統(tǒng)結(jié)合整平機(jī)實(shí)時(shí)位置和設(shè)計(jì)位置的坐標(biāo)差值及各個(gè)錨纜拉力值,通過控制整平施工船上的絞錨機(jī)實(shí)時(shí)調(diào)整各個(gè)錨點(diǎn)的纜繩長度,逐步將整平機(jī)穩(wěn)定絞移至設(shè)計(jì)位置。就位過程中,系統(tǒng)將整平機(jī)四角距離設(shè)計(jì)位置的偏移分解至“右舷-艏向”船體坐標(biāo)系,并以指向箭頭的形式繪制在電子地圖中整平機(jī)對(duì)應(yīng)位置,方便現(xiàn)場指揮人員判斷整平機(jī)當(dāng)前位置與設(shè)計(jì)位置的關(guān)系。
在精細(xì)就位階段,整平施工船錨定在設(shè)計(jì)位置后,整平機(jī)開始下沉坐底。由于海底地形復(fù)雜,為了防止坐底過程中整平機(jī)橫梁與地形發(fā)生直接磕碰,系統(tǒng)在預(yù)先導(dǎo)入的多波束測深系統(tǒng)掃測數(shù)據(jù)支持下,繪制整平機(jī)4個(gè)剖面的剖面線,直觀地反映出液壓樁腿、整平機(jī)橫梁與地形的相互關(guān)系(見圖3)。
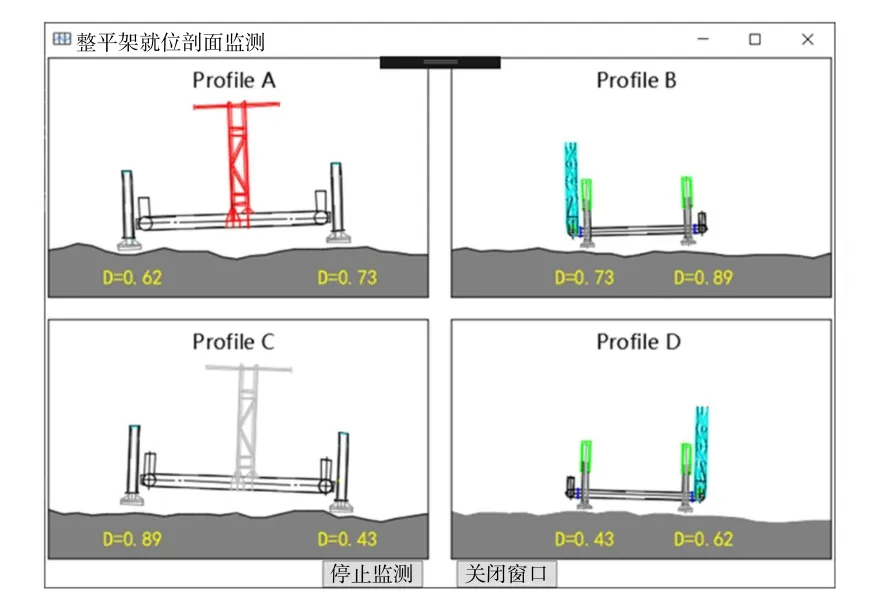
圖3 精細(xì)就位階段整平機(jī)各個(gè)剖面的就位剖面窗口Fig.3 Positioning window of leveling machine's profiles during its fine positioning
2.3 整平作業(yè)監(jiān)測
整平作業(yè)監(jiān)測是系統(tǒng)的核心,輔助決策系統(tǒng)融合水下聲學(xué)定位信標(biāo)、傾斜儀、測深儀和壓力傳感器等設(shè)備數(shù)據(jù),獲取整平機(jī)的位置姿態(tài)、特別是高程等關(guān)鍵整平施工輔助決策信息,并以用戶易于理解的形式實(shí)時(shí)提供給現(xiàn)場施工人員。
整平機(jī)上的料斗口同時(shí)具備刮刀的功能,決定最終整平高程,其位置及高程是整平施工現(xiàn)場的關(guān)注重點(diǎn)。整平作業(yè)監(jiān)測中的數(shù)據(jù)融合功能根據(jù)現(xiàn)場各個(gè)設(shè)備的輸出內(nèi)容、校準(zhǔn)參數(shù)及其安裝位置進(jìn)行多個(gè)步驟的融合計(jì)算,實(shí)現(xiàn)“整平施工船-整平機(jī)-料斗口”的三維坐標(biāo)傳遞。系統(tǒng)中水下聲學(xué)定位信標(biāo)和壓力傳感器容易受到水深、海況、水密度等外部因素影響[14],其工作狀態(tài)往往不夠穩(wěn)定,為了在寶貴的整平施工窗口期提供不間斷整平監(jiān)測數(shù)據(jù),系統(tǒng)中提供了整平機(jī)定位要素(平面位置、高程及3個(gè)坐標(biāo)軸的旋轉(zhuǎn)角度)的多個(gè)數(shù)據(jù)來源進(jìn)行冗余設(shè)備備份。
整平作業(yè)監(jiān)測模塊主窗口包括整平高程?hào)鸥駡D、剖面圖和曲線圖3個(gè)部分,能夠從多個(gè)角度展現(xiàn)監(jiān)測過程中整平機(jī)的位置姿態(tài),以及料斗口高程和設(shè)計(jì)高程的相對(duì)關(guān)系。
1)整平高程?hào)鸥駡D:輔助決策系統(tǒng)將整平區(qū)域抽象為整平柵格圖,根據(jù)料斗在整平區(qū)域內(nèi)的當(dāng)前相對(duì)位置將料斗映射至柵格圖坐標(biāo)系中,并按照預(yù)設(shè)的顏色表,將當(dāng)前料斗口高程與設(shè)計(jì)高程的差值填充柵格圖中對(duì)應(yīng)的區(qū)域(圖4)。伴隨整平過程中料斗口逐壟行進(jìn),柵格圖中也逐壟填充顏色,從而直觀地反映出實(shí)際整平高程和設(shè)計(jì)高程的差值(即該幅整平施工質(zhì)量)。同時(shí)在柵格圖中按照各個(gè)液壓樁腿的分布在對(duì)應(yīng)位置顯示各個(gè)液壓樁腿的伸長量、需要調(diào)整的距離等關(guān)鍵信息,使整平過程中用戶感興趣的各項(xiàng)參數(shù)在整平柵格圖中得到集中展示。
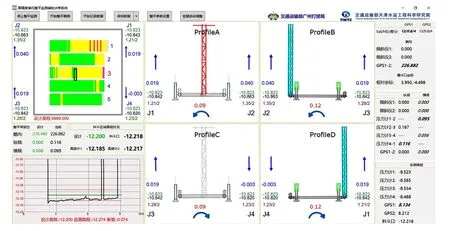
圖4 整平作業(yè)監(jiān)測主界面Fig.4 Main window for leveling operation monitoring
2)剖面圖:剖面圖中的主體是從4個(gè)角度觀察得到的整平機(jī)剖面,根據(jù)對(duì)應(yīng)方向的整平機(jī)傾斜角度,在剖面視圖中旋轉(zhuǎn),展示對(duì)應(yīng)觀察角度整平機(jī)的姿態(tài)信息。同時(shí),在剖面附屬的2個(gè)液壓樁腿的對(duì)應(yīng)位置顯示液壓樁腿伸長量、需要調(diào)整的距離等關(guān)鍵信息,從而為現(xiàn)場操作人員提供更加易于理解的操作提示。
3)曲線圖:曲線圖的橫軸表示當(dāng)前整平壟上各點(diǎn)到整平壟起始端的距離,縱軸表示高程。在曲線圖中繪制了設(shè)計(jì)高程曲線,及根據(jù)高程精度限差繪制的指示曲線。在整平過程中,系統(tǒng)根據(jù)料斗口高程實(shí)時(shí)更新料斗口高程動(dòng)態(tài)曲線,從而反映出其與設(shè)計(jì)高程的相互關(guān)系及整平質(zhì)量。
2.4 整平數(shù)據(jù)管理
整平數(shù)據(jù)包含了最終的整平高程等施工關(guān)鍵信息,對(duì)于質(zhì)量管理、分析都具有重要價(jià)值,需要進(jìn)行有機(jī)組織管理以進(jìn)一步深入利用。文件系統(tǒng)相比較于常用的關(guān)系數(shù)據(jù)庫具有操作方便的優(yōu)點(diǎn),更適合當(dāng)前類型的工程需要,整平施工中的監(jiān)測成果以及各個(gè)傳感器的原始數(shù)據(jù)都以數(shù)據(jù)文件的形式被完整保存。
整平監(jiān)測數(shù)據(jù)文件自動(dòng)以“當(dāng)前整平幅名稱+日期時(shí)間”的形式進(jìn)行命名,后綴名為.GSSurvey,包含文件頭和文件體兩部分。文件頭記錄了工程坐標(biāo)系參數(shù)、文件存儲(chǔ)路徑、記錄開始時(shí)間、設(shè)備名稱及偏移、工程項(xiàng)目備注信息等元數(shù)據(jù);文件體則按照“整平幅-整平壟-采樣點(diǎn)”的結(jié)構(gòu),每一個(gè)整平壟對(duì)應(yīng)一行數(shù)據(jù),在數(shù)據(jù)行中順序存儲(chǔ)該壟各個(gè)采樣點(diǎn)的監(jiān)測高程,實(shí)現(xiàn)對(duì)整平結(jié)果的質(zhì)量檢查、超限點(diǎn)個(gè)數(shù)等關(guān)鍵數(shù)據(jù)統(tǒng)計(jì)等工作。針對(duì)傳感器原始數(shù)據(jù),輔助決策系統(tǒng)則按照“傳感器編號(hào)-時(shí)間戳-原始數(shù)據(jù)”的方式制定組織和存儲(chǔ)策略,設(shè)計(jì)了后綴為.GSRaw的二進(jìn)制文件格式,按照時(shí)間戳信息記錄各個(gè)設(shè)備的坐標(biāo)、壓力、高度等原始數(shù)據(jù),并可通過系統(tǒng)提供的數(shù)據(jù)回放功能,在現(xiàn)場作業(yè)結(jié)束后回放整平施工過程,實(shí)現(xiàn)整平作業(yè)實(shí)時(shí)監(jiān)測數(shù)據(jù)的有效管理和充分利用。
系統(tǒng)中的整平數(shù)據(jù)按整平幅組織,在整平數(shù)據(jù)管理窗口中,當(dāng)前項(xiàng)目的整平數(shù)據(jù)集中在左側(cè)列表框中。選中某整平幅的監(jiān)測數(shù)據(jù)后,系統(tǒng)會(huì)自動(dòng)調(diào)取詳細(xì)整平監(jiān)測數(shù)據(jù)并在右側(cè)顯示柵格影像及曲線圖。柵格影像用于表達(dá)整平區(qū)域的條帶狀連續(xù)整平高程信息[15],輔助決策系統(tǒng)根據(jù)各個(gè)整平幅監(jiān)測數(shù)據(jù)生成GeoTIFF柵格影像,將整平施工時(shí)的平面位置記錄在對(duì)應(yīng)的.tfw文件中,用顏色表示整平實(shí)測高程和設(shè)計(jì)高程的差值,并顯示在電子地圖的背景底圖中,實(shí)現(xiàn)基于地理信息技術(shù)的整平監(jiān)測數(shù)據(jù)平面位置、整平高程質(zhì)量的關(guān)聯(lián)集中顯示,直觀的圖形化展示整平施工質(zhì)量。
3 輔助決策系統(tǒng)應(yīng)用
2020年7月和11月,輔助決策系統(tǒng)分別在深中通道E32、E31管節(jié)寄放區(qū)整平作業(yè)中得到應(yīng)用。在整平前,使用輔助決策系統(tǒng)中的整平參數(shù)設(shè)計(jì)模塊準(zhǔn)備整平區(qū)域內(nèi)各幅整平設(shè)計(jì)文件;測量人員使用全站儀獲取各個(gè)設(shè)備的精確安裝和校準(zhǔn)參數(shù),輔助決策系統(tǒng)在此基礎(chǔ)上,融合計(jì)算出整平機(jī)位置、水下料斗口實(shí)時(shí)高程等關(guān)鍵參數(shù),指導(dǎo)現(xiàn)場操作人員完成寄放區(qū)基礎(chǔ)整平工作;整平施工結(jié)束后,輔助決策系統(tǒng)匯總各幅的整平質(zhì)量,統(tǒng)計(jì)各整平幅中偏離設(shè)計(jì)高程的采樣點(diǎn)三維坐標(biāo),為后續(xù)施工環(huán)節(jié)提供參考。期間先后完成110余幅整平作業(yè),輔助決策系統(tǒng)各個(gè)模塊的功能性、可靠性得到全面檢驗(yàn)。
4 結(jié)語
1)輔助決策系統(tǒng)滿足了深中通道管節(jié)寄放區(qū)水下整平施工過程中的位置數(shù)據(jù),特別是高精度高程數(shù)據(jù)監(jiān)測需求,已在深中通道寄放區(qū)整平中發(fā)揮重要作用。文章剖析了其系統(tǒng)架構(gòu)和主要功能模塊,并介紹了適應(yīng)完全水下整平作業(yè)模式的柔性高程傳遞技術(shù)。
2)應(yīng)用結(jié)果表明,輔助決策系統(tǒng)使用的數(shù)據(jù)融合計(jì)算方法高效正確,剖面、柵格、曲線、文本相結(jié)合的豐富數(shù)據(jù)展現(xiàn)方式能夠充分展示實(shí)時(shí)監(jiān)測高程和設(shè)計(jì)高程的相對(duì)關(guān)系,數(shù)據(jù)組織管理科學(xué)合理,適應(yīng)當(dāng)前精細(xì)化施工發(fā)展趨勢,滿足整平施工應(yīng)用需求。
3)后續(xù)可以和水下液壓控制系統(tǒng)結(jié)合,實(shí)現(xiàn)輔助決策系統(tǒng)和工業(yè)控制系統(tǒng)的聯(lián)動(dòng),進(jìn)一步提高水下整平施工現(xiàn)場的自動(dòng)化水平。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
建材發(fā)展導(dǎo)向(2021年9期)2021-07-16 07:11:36
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
西安建筑科技大學(xué)學(xué)報(bào)(自然科學(xué)版)(2014年2期)2014-11-12 13:04:54