大學物理實驗激光衍射教學儀器的改進*
2022-01-27 13:15:36趙培剛李冬萍姜永清
物理通報 2022年2期
趙培剛 李冬萍 姜永清
(中國海洋大學物理實驗教學中心 山東 青島 266000)
大學物理光的衍射實驗以激光為光源入射到光柵等器件上,借助一維調節架移動光探頭,沿衍射圖樣展開方向在不同位置測量光強,從而得到衍射光強分布譜線(圖1).實驗優點是學生參與度高;缺點是人工移動光探頭,每0.5 mm逐點記錄光強值,測量衍射光強分布長達10 cm,數據多時間長;再加上光強波動以及背景噪聲干擾等,造成了位置和光強的讀數誤差較大.

圖1 激光衍射實驗儀一維調節架和光探頭
為解決衍射光強分布測量實驗時間長、誤差大的問題,利用單片機控制光探頭替代人工移動,實時采集存儲和處理數據[1],能高效完成衍射光強分布的精密測量.
1 衍射儀器改進
1.1 基本構想
(1)用單片機控制步進電機帶動探頭精準移動,可減小人工移動探頭的位置誤差;
(2)由單片機快速完成多次數據測量并取平均值,能精確測量同一位置衍射光強[2].
1.2 硬件構成
光衍射實驗儀器結構如圖2所示,主要包括單片機MCU、顯示器、按鍵、步進電機、光探頭、放大電路、模數轉換電路.

圖2 光衍射儀器系統框架示意圖
光衍射儀器硬件構成:
(1)單片機采用mega16L,自帶10位ADC,結構簡單運行穩定[3];
(2)液晶顯示器采用OCMJ2X8C,能及時掌握儀器運行信息;
(3)兩相步進電機帶動光探頭移動的絲杠螺距為1 mm,使用32細分的驅動器驅動,使光探頭移動的最小間距為0.156 25 μm(1 mm/6 400步),通過設置脈沖個數,可改變光探頭移動間距(如128脈沖* 0.156 25 μm=0.02 mm),如圖3所示;

圖3 步進電機設計圖
(4)3個運算放大器構成的放大電路,具有放大倍數可調、精密度高、輸入電阻大及共模抑制比較高等優點,考慮到高頻信號的干擾,在放大電路輸入端加入低通有源濾波電路,如圖4所示[4].

圖4 放大電路原理圖
1.3 軟件控制
軟件控制包括4個程序模塊.
(1)液晶屏:顯示測量數據;
(2)模數轉換模塊:負責將放大電路輸出的模擬信號轉換成數字信號;
(3)步進電機控制模塊:主要控制步進電機按設定參數精確移動;
(4)按鍵:設置參數.C語言編寫單片機控制程序,流程如圖5所示.

圖5 程序流程圖
1.4 儀器組成
單片機與光探頭相結合的光強記錄儀:單點測量次數1~100可選;光探頭步進間距0.02~1 mm可選;儀器實物組成如圖6所示.

圖6 改進激光衍射實驗儀器
通過單片機處理數據信號,減少數據擾動干擾,提高光強測量精度;使用單片機控制探頭移動,減少人工操作誤差[5~12].
2 實驗測量結果對比
選用氦氖激光器作為光源;滿足遠場條件L=1 m;設定測量參數;逐點記錄光強,利用單片機按比例放大相對光強值(零級光譜除外),不會影響暗紋或明紋的水平位置,獲得的光強分布圖直觀且易于處理數據.
2.1 光柵衍射實驗
所用的光柵的光柵常數為20線,單片機控制和手動移動光探頭掃描范圍均取85 mm;測量間隔均為0.5 mm.繪制光柵衍射圖線如圖7和圖8所示.

圖7 單片機控制探頭的光柵衍射光強分布圖線

圖8 手動移動探頭的光柵衍射光強分布圖線
2.2 單縫衍射實驗
單縫寬0.1 mm,單片機控制和手動移動光探頭掃描范圍均取6 cm;測量間隔均為0.5 mm.繪制單縫光強分布圖線如圖9和圖10所示.

圖9 單片機控制探頭的單縫衍射光強分布圖線
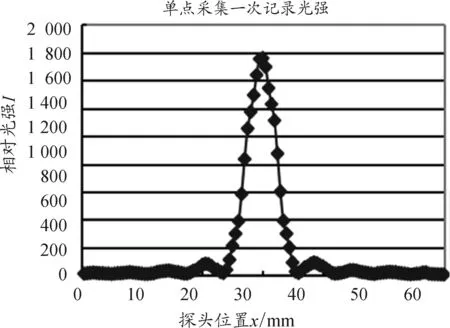
圖10 手動移動探頭的單縫衍射光強分布圖線
2.3 實驗結果對比
實驗結果如表1所示.

表1 衍射實驗結果
3 結論
設計的單片機控制光探頭移動,是利用步進電機步進精度高、可快速啟停帶動光探頭精確移動,有效減小人工轉動手輪移動光探頭造成的讀數誤差,還能節省大量的手動調節時間;利用高精度AD 進行多次光強采集檢測, 可減少光強擾動帶來的光強測量誤差.波長測量相對誤差小,實驗操作自動快速省時,有效提高了實驗測量精度和實驗效率.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
電子制作(2019年13期)2020-01-14 03:15:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
