煤礦輔助運輸車智能監控系統設計
2022-01-27 06:29:10許建紅
機械管理開發 2021年12期
許建紅
(西山煤電集團有限責任公司官地煤礦運輸區, 山西 太原 030022)
引言
煤礦井下輔助運輸包括小型設備、材料、矸石等物料的輔助運輸,如5 t、7 t、10 t 等輔助鏟運機;包括井下人員的輔助運輸,如7 座、19 座運人車;還包括對綜采工作面液壓支架等作業設備的輔助運輸,如80 t 支架搬運車等。煤礦井下輔助運輸車是井下運輸系統的重要組成部分,隨著國家節能減排政策的不斷深入,煤礦井下輔助運輸系統逐漸由柴油驅動向電驅動轉換,極大改善井下勞動環境[1-2]。為保證井下輔助運輸車安全、高效、有序運行,運輸車智能監控系統成為亟需解決的問題。煤礦輔助運輸車監控系統從控制方式上分析,可采用分站結構、集控結構,利用計算機串行總線通訊模式進行數據、故障信息采集。從主控制器類型上分析,可分為基于PLC控制器、基于微機控制器、基于單片機的三種監控系統,其中單片機監控模式抗干擾能力差、環境適應性差。微機監控模式對主機的運行環境較苛刻,靈活性不夠。PLC 控制器模式抗干擾能力強,能適應煤礦井下惡劣環境;可直接驅動負載,提高信號傳輸的可靠性;滿足輔助運輸車控制要求,可實現自動、就地、集中三種控制模式[3-5]。文章基于控制器技術,設計煤礦輔助運輸車智能監控系統,可長期高效、穩定運行于煤礦井下,提高輔助運輸車的安全性和穩定性,實現輔助運輸車高效率運行。
1 總體設計
煤礦輔助運輸車智能監控系統在車輛運行時,實時采集運輸車運行數據,經控制器處理、比較后控制運輸車進行相應的動作,如前進、后退、加速、減速、轉向等。煤礦輔助運輸車智能監控系統由電源模塊、數據信號采集模塊、主控器模塊、數據顯示模塊以及邏輯控制模塊五部分組成,完成輔助運輸車的智能監控,總體設計框圖如圖1 所示。

圖1 煤礦輔助運輸智能監控系統總體設計框圖
1.1 電源模塊
根據運輸車監控系統設計要求,電源模塊需要提供DC24V、DC12V 以及DC5V 三種電源,分別為控制器、傳感器以及噪聲調理電路供電,增加電源隔離模塊,提高電源供電的穩定性。
1.2 數據信號采集模塊
數據信號采集模塊主要采集用于運輸車監控的傳感器模擬量數據,如用于檢測電動機的電壓、電流傳感器,用于檢測車速的速度傳感器,用于檢測車廂溫度的溫度傳感器等。為減小模擬量信號的干擾,設計降噪電路,提高模擬量信號的穩定性。數據信號采集還需采集用于控制車輛的開關量信號,如前進、后退、轉向、加速、減速等。上述所有數字量、模擬量信號都由PCM-3718H 數據采集卡采集,并通過總線通信方式發送給運輸車的主控制器模塊。
1.3 主控制器模塊
主控制器模塊是運輸車智能監控系統的核心模塊,用于接收并輸出信號采集模塊的數據,完成數據的判斷并參與邏輯控制。主控制器根據判斷結果對車輛進行控制。主控制器模塊的核心CPU 采用PCM-3370 微控制器,并擴展液晶顯示、串口、網絡接口等用于數據的傳輸。
1.4 數據顯示模塊
數據顯示模塊用于實時顯示并更新運輸車的各監測量以及故障信息,及時掌握運輸車的運行狀態。
1.5 邏輯控制模塊
邏輯控制模塊主要完成運輸車的邏輯控制,如控制車輛前進、后退、加減速、轉向等,驅動相應的電磁閥工作,在動作的同時發車語音聲光報警,保證運輸車動作的安全性。
2 硬件設計
煤礦輔助運輸車智能監控系統的硬件元器件主要包括核心控制模塊、數據采集模塊、電磁閥、溫度傳感器、壓力傳感器、車速傳感器、氣體濃度傳感器等。核心控制器選用PCM-3370 微控制器,該控制器的CPU 采用的是奔騰933 微處理器,支持系統內存幀緩沖,處理時延小、響應速度快,滿足輔助運輸車的控制性能要求。數據采集模塊選用的型號為PCM-38718H,該數據采集模塊的精度為12 位,支持8 路差分或16 路單端模擬量輸入信號并可通過軟件編程自定義增益,輸入模擬量信號可為0~10 V、0~1 V、0~0.1 V 單極性電壓信號,10 V、5 V、1 V 雙極性電壓信號;支持12 位D/A、A/D 轉換,采樣頻率最高位100 kHz,可采用DMA 傳輸。傳感器選型見表1所示。

表1 煤礦輔助運輸智能監控系統傳感器型號選型
3 軟件設計
根據煤礦輔助運輸車總體設計,將煤礦輔助運輸車智能監控軟件系統劃分為系統初始化及啟動程序、數據信號采集程序、主控制器數據處理程序、數據顯示處理程序以及邏輯控制程序五部分,圖2 為煤礦輔助運輸車智能監控系統軟件設計流程圖。
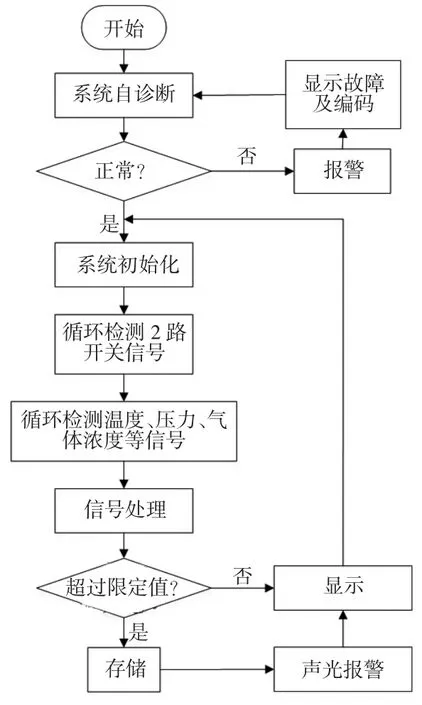
圖2 煤礦輔助運輸車智能監控系統軟件設計流程
3.1 系統初始化及啟動程序
主要完成系統初始化工作,包括設置各路傳感器的閾值、程序中用到的變量/內存、硬件接口,同時還需完成對數據采集卡的初始化工作。
3.2 數據信號采集程序
主要完成周期性的采集溫度、壓力、車速、CO 氣體濃度、瓦斯氣體濃度等傳感器模擬量數據,需周期性采集的還包括“前進”“后退”“左轉”“右轉”等運輸車控制開關量信號等,分別存儲至RAM 或者EXPROM 數據存儲器中。
3.3 主控制器數據處理程序
主要以CAN 總線通信模式接收數據信號采集程序傳送的模擬量、開關量數據,完成數模轉換,同時完成模擬量數據超限判斷、開關量數據延時處理。
3.4 數據顯示處理程序
主要完成輔助運輸車運行狀態數據、參數設置信息、故障信息等數據的實時顯示。
3.5 邏輯控制程序
主要完成CAN 總線通信的建立、維護以及數據傳送,完成對輔助運輸車的整車控制,自動故障報警等。
4 監控平臺設計
為驗證設計并實現的煤礦輔助運輸車智能監控系統的運行品質,對監控系統進行測試。測試前,根據總體設計要求,將PCM-3370、PCM3718H、各傳感器、電源裝置等進行電氣連接。設計的監控平臺系統包含登錄界面、系統自檢界面、數據顯示界面、故障報警界面以及數據歷史查詢界面等。如下頁圖3 所示為數據監控界面,可實時顯示輔助運輸車溫度值、氣體濃度值、車速、冷卻水水位、機油壓力等。同時對該數據可進行復位、保存、退出等操作。

圖3 煤礦輔助運輸車智能監控系統數據監控界面
5 結語
設計的煤礦輔助運輸車智能監控系統能夠自動監測車輛運行狀態信息以及故障信息,通過CAN 總線通訊模式將傳感器數據、開關量數據傳送至監控平臺,為及時掌握輔助運輸車運行、故障信息提供依據,加快提升煤礦井下輔助運輸車自動化、智能化水平,提高輔助運輸車的安全運行水平和運行效率。
猜你喜歡
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
工業設計(2016年4期)2016-05-04 04:00:23
現代企業(2015年8期)2015-02-28 18:55:34
現代企業(2015年6期)2015-02-28 18:51:50
河南科技(2014年8期)2014-02-27 14:08:07
