MEMS 高精度雙軸傾角傳感器的設計
2022-01-28 06:34:00朱穎周妤
電子制作 2022年1期
關鍵詞:信號
朱穎,周妤
(西安創聯科技(集團)有限責任公司,陜西西安,710065)
0 前言
MEMS 傳感器正逐步占據傳感器市場,與傳統的傳感器相比,它具有體積小、重量輕、成本低、功耗低、可靠性高、適于批量化生產、易于集成和實現智能化的特點。同時,在微米量級的特征尺寸使得它可以完成某些傳統機械傳感器所不能實現的功能。國內的一些高校和研究機構已著手MEMS 傳感器技術的開發和研究,但在靈敏度、可靠性及新技術能力提升方面與國外相比還存在較大差距。許多MEMS 傳感器品種尚未具備批量生產的能力,離產品的實用化和產業化還很遠,有待于進一步提高和完善。因此,為了緊跟傳感器市場需求,實現產業技術高端化升級,整合現有資源,擴大產品類型,開展MEMS 傳感器項目研發勢在必行。近年來,國內出現了很多生產傾角儀的廠家,他們生產的傾角儀在國內處于領先水平,精度也越來越高,體積越來越小。本文采用的MEMS 傳感芯片與STM32 單片機開發的傾角傳感器,具有體積小,穩定性好,精度高的特點,能滿足大部分工業傾角測量需求。
1 電路原理設計
MEMS 雙軸傾角傳感器電路主要由加速度傳感器SCL3300D01-1、運算處理器TM32F103C8T6、串口通信模塊MAX3485ESA 以及電源模塊等組成。
電路系統框圖如圖1 所示。

圖1 電路系統框圖
■1.1 角度信號采集單元
加速度傳感器負責前段信號的采集,信號調理等功能,采用日本村田Murata 的一款基于MEMS 技術數字傾角傳感器SCL3300D01-1,采用 SPI 數字接口,全溫度范圍內零點誤差為±0.86°。該傳感器有很高的集成度,主要由雙軸加速度計、溫度傳感器、信號調理器和內置AD 轉換等模塊組成,具有低噪聲、高耐沖擊性和溫度自補償等特點。工作溫度-40℃~125℃,供電電壓為3.3V,測量范圍±90℃(本設計角度范圍±30°)。傳感器模擬輸出分辨率 0.0025°。傳感器可根據算法的定義情況(角度解算方法、信號調理算法、濾波算法),搭建合理的外圍電路,達到穩定可靠且精準的信號輸出。
單軸加速度傳感器測傾角原理如圖2 所示。當加速度傳感器放置于一個具有一定傾斜角的平面上,重力加速度沿斜面的分量為Ax。在X 方向產生θ 的角度,重力加速度為1g,根據三角函數的關系得出θ=arc sin(Ax/1g)。
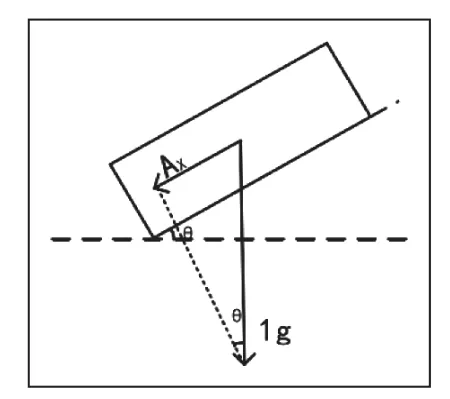
圖2 單軸加速度傳感器測傾角原理
加速度傳感器不同方向的加速度以電壓變化量的方式出現,于是X 軸角度θ=arc sin(ΔUx/S),ΔUx 為電壓變化量,S 為芯片的靈敏度,單位V/g。Y 軸有類似關系式。
電路原理圖如圖3 所示。

圖3 角度信號采集模塊電路圖
■1.2 運算處理器
微控制器是信號運算處理的核心部件。主要負責對收到的數據進行濾波、解算、誤差修正,最終得到高精度的傾斜角角度數據,然后將數據一部分通過串口傳輸給上位機進行角度實時顯示,另一部分傳輸至數據存儲模塊以便隨時調用。
該控制器選用意法半導體STM32F103C8T6 單片機芯片。它是一款基于32 位Cortex-M3 內核增強型嵌入式系列CPU,主頻達到72 MHz,全雙工模式下通信速度可達 18 MIPS,寬電壓供電范圍,在2.0~3.6 V 之間,工作溫度-40℃~ 105℃,并且具有豐富的外設,包括看門狗、定時器、PWM、ADC、DAC、SPI 以及USART 和方波輸出等。功能全面,內嵌4~16MHz 晶體振蕩器,擁有12 通道DMA 控制器,可完成數據采集、A/D 轉換、角度解算等,且有 51 個多功能雙向IO 口,能夠滿足設計需要,其電路原理圖如圖4 所示。

圖4 運算處理器電路圖
■1.3 數據通信電路
由于485 串行通信協議具有接口簡單、抗干擾能力強、可多機并聯且傳輸距離遠等優點,故傳感器采用MAX3485通信協議,接口芯片采用MAX3485 為收發器,該芯片具有低功耗、抗干擾能力強等特點,傳輸速率可達2.5Mbps。電路原理圖如圖5 所示。
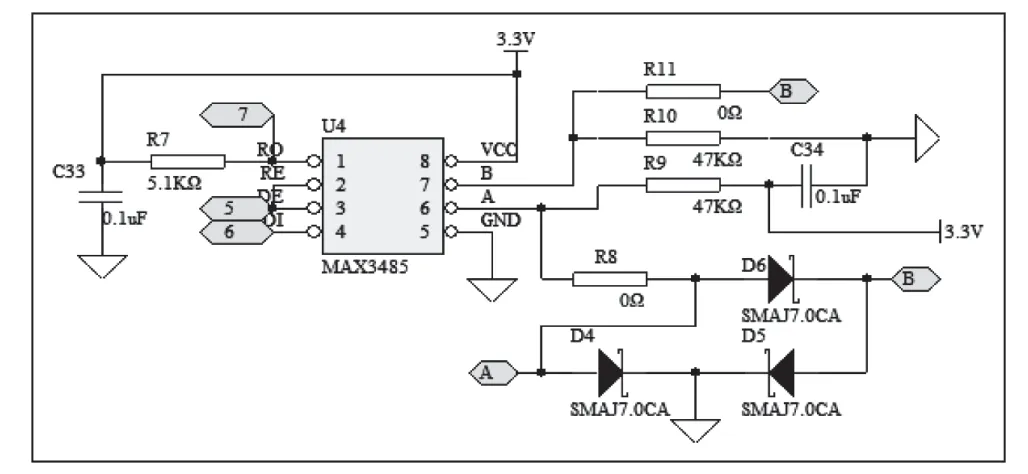
圖5 MAX3485 串行通信電路圖
■1.4 電源模塊設計
電源系統包括三部分,兩個電壓模塊及3.3V 基準電源。系統電路使用二級降壓結構設計,采用分級式壓降的方式,即通過轉換器將輸入電壓12~35V 轉換為一個5V 電壓,然后根據其它模塊將供電5V 降為3.3V。另外,信號采集基準源為 3.3V 電壓。
一級電源轉換芯片只需要給二級轉換電路供電,這樣可以減少電源電壓波動對后續電路的影響。該芯片采用德州儀器生產的低功耗、低壓差的線性穩壓器 LMR14006YDDCR,休眠模式電流低至 28μA,可以將外接的 4~40V 電壓穩定在 5V,電壓輸入端設計了二極管和保險絲,防止電源反接或電流超標造成內部核心器件的損壞。
二級電源轉換芯片采用超低噪聲低壓差穩壓器AMS1117-3.3,將一級電壓轉換芯片轉換出的 5V 電壓轉換為3.3V。輸出電壓為3.267-3.333V,電流在900-1500mA,靜態電流(最大)為10mA,且具有熱過載保護和短路保護功能,在電源的輸入和輸出端采用電容濾波增加電源穩定性。
3.3V基準源為加速度計模塊提供軟件算法數據,基準源精度要求高,選用REF196GSZ 芯片實現5V 到3.3V 標準電壓基準,輸出電壓最大誤差為±2mV,靜態電流低至15μA。
2 軟件設計
基于Keil uVision V5.0 編程環境,開發了傳感器應用軟件,進行產品軟件系統設計,傳感器上電后先進行時鐘、串口、A/D,SPI、定時器和IO 口的初始化,采集信號運算處理等,程序添加了零點校準標定功能,通過發送指令就可以實現系統自標定。程序流程圖如圖6 所示。
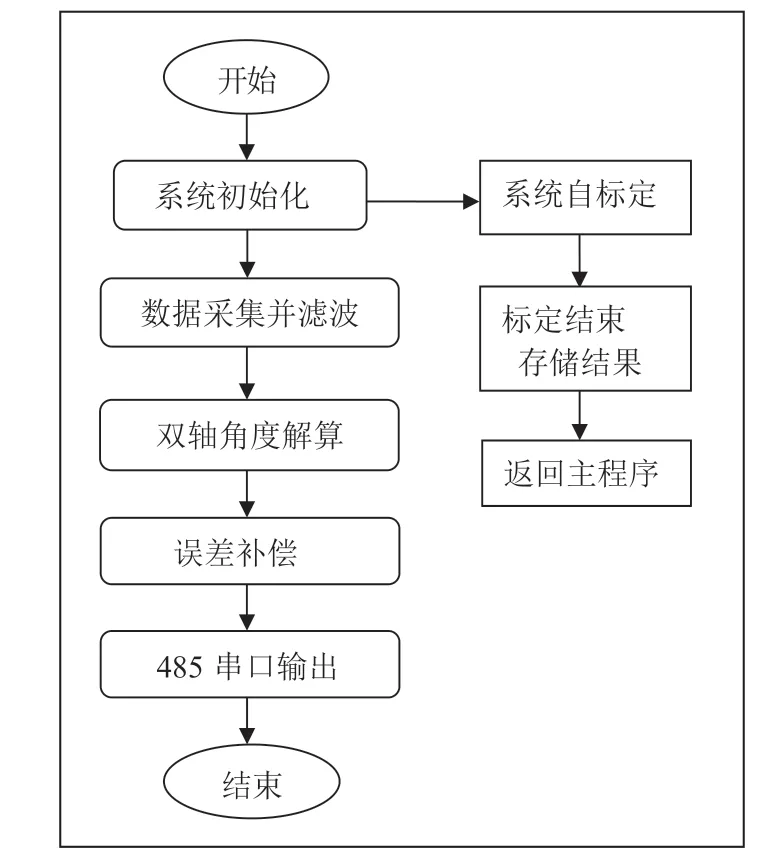
圖6 MEMS 雙軸傾角傳感器技術軟件流程圖
3 樣品測試
測試設備:采用Y3003RA 系列三維電動旋轉臺,該轉臺絕對定位精度為0.01°。
測試方法:首先對轉臺進行設備調試與零點位置校準,然后通過工裝夾具將角度傳感器固定在三維測試轉臺上,在測量滿量程范圍內均勻取7 點進行角度檢測。測試結果及數據分析如表1 所示。

表1 角度測試數據表
圖7 MEMS 雙軸傾角傳感器硬件電路實物圖
4 結論
本文設計的MEMS 雙軸傾角傳感器具有性能穩定、一致性好、測試精度高等特點,分辨率達到0.003°,經計算傳感器的精度為0.02%,可以滿足多種工業應用要求,具有廣闊的市場前景。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
