基于多傳感器信息融合的異步點(diǎn)跡關(guān)聯(lián)方法
2022-01-28 03:01:06劉靜濤周君會(huì)
計(jì)算機(jī)應(yīng)用與軟件 2022年1期
劉靜濤 路 娜 周君會(huì)
1(91977部隊(duì) 北京 100036) 2(西安電子科技大學(xué)通信工程學(xué)院 陜西 西安 710071)
0 引 言
基于多傳感器的信息融合系統(tǒng)充分利用了各個(gè)傳感器的信息資源,通過(guò)各傳感器之間信息互補(bǔ)來(lái)發(fā)揮各傳感器的性能優(yōu)勢(shì),通過(guò)將多個(gè)傳感器的信息進(jìn)行關(guān)聯(lián)、融合等多級(jí)處理來(lái)獲得更加精確的點(diǎn)跡信息,使得多傳感器系統(tǒng)能夠更加高效穩(wěn)定的工作。
點(diǎn)跡關(guān)聯(lián)的目的是找到各個(gè)傳感器中來(lái)自同一個(gè)目標(biāo)的局部點(diǎn)跡。基于統(tǒng)計(jì)學(xué),文獻(xiàn)[1]和文獻(xiàn)[2]將加權(quán)法應(yīng)用于點(diǎn)跡關(guān)聯(lián)中;Bar-shalom等[3-5]通過(guò)改進(jìn)加權(quán)算法提出了修正法;Kosaka等[6]提出了最近鄰(Nearest Neighbor,NN)算法;何友等[7-8]對(duì)最近鄰算法進(jìn)行改進(jìn),提出了KNN和MKNN算法。然而當(dāng)目標(biāo)數(shù)目比較密集或者誤差較大時(shí),統(tǒng)計(jì)學(xué)算法關(guān)聯(lián)的效果明顯下降。
由于不同傳感器的原因,得到的往往是異步點(diǎn)跡。文獻(xiàn)[9-11]提出了最小二乘法進(jìn)行時(shí)間配準(zhǔn)解決異步點(diǎn)跡關(guān)聯(lián)。然而,通過(guò)時(shí)間配準(zhǔn)解決異步點(diǎn)跡關(guān)聯(lián)的方法會(huì)產(chǎn)生較大的估計(jì)誤差,并會(huì)增加算法的復(fù)雜度,因此提出一種有效的異步點(diǎn)跡關(guān)聯(lián)方法是非常有必要的。
本文基于分布式多傳感器信息融合系統(tǒng),主要對(duì)一般場(chǎng)景下的點(diǎn)跡關(guān)聯(lián)以及異步場(chǎng)景下的點(diǎn)跡關(guān)聯(lián)進(jìn)行研究。在不進(jìn)行時(shí)間配準(zhǔn)的前提下,提出一種基于時(shí)間分段和提取趨勢(shì)項(xiàng)的方法解決異步點(diǎn)跡關(guān)聯(lián)問(wèn)題。
1 點(diǎn)跡關(guān)聯(lián)原理及流程
在不同的傳感器系統(tǒng)下,由于各自的工作方式、參考坐標(biāo)系、測(cè)量誤差及采樣速率等不同,生成的局部點(diǎn)跡相互獨(dú)立。將不同傳感器局部點(diǎn)跡數(shù)據(jù)轉(zhuǎn)換到統(tǒng)一坐標(biāo)系下并進(jìn)行時(shí)間配準(zhǔn),通過(guò)預(yù)處理可提高目標(biāo)跟蹤精度。點(diǎn)跡關(guān)聯(lián)處理流程如圖1所示。
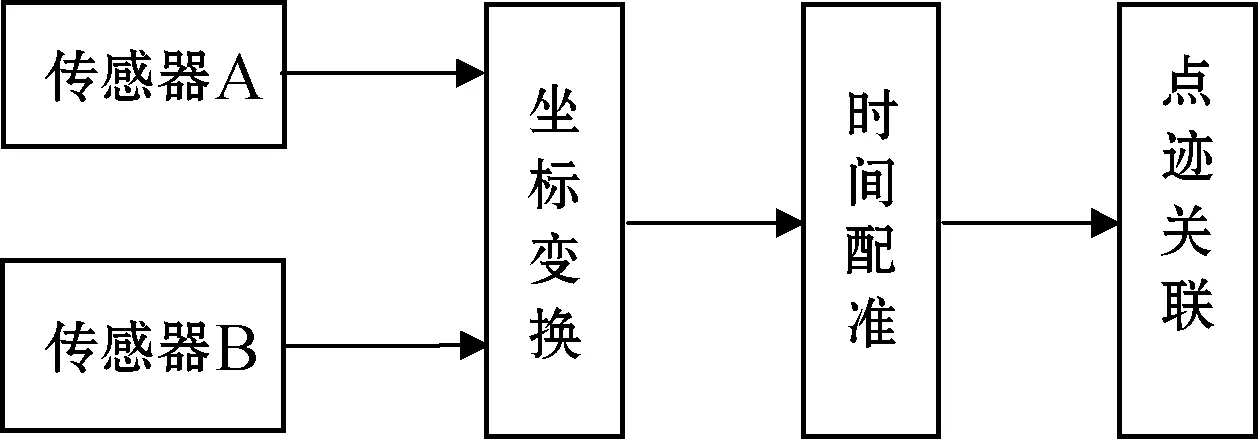
圖1 點(diǎn)跡關(guān)聯(lián)處理流程
在目前的研究中,一般方法是通過(guò)時(shí)間配準(zhǔn)將異步點(diǎn)跡同步化,最常見(jiàn)的就是內(nèi)插外推及最小二乘法時(shí)間配準(zhǔn)的方法。在本文的研究中,傳感器A和傳感器B的采樣速率是倍數(shù)關(guān)系,采用的方法是將采樣速率比較快的傳感器的量測(cè)數(shù)據(jù)統(tǒng)一到采樣速率比較慢的傳感器上,從而實(shí)現(xiàn)時(shí)間的同步化,完成時(shí)間配準(zhǔn)。
2 異步點(diǎn)跡關(guān)聯(lián)
在分布式傳感器的點(diǎn)跡融合系統(tǒng)中,由于不同傳感器不同的采樣速率或者通信延遲,因此得到的往往是異步點(diǎn)跡。
在異步點(diǎn)跡關(guān)聯(lián)的研究中,主要是將異步同步化。由于異步同步化計(jì)算量比較大,同時(shí)也會(huì)帶來(lái)較大的計(jì)算誤差,最終使得配準(zhǔn)精度較低。本文提出一種基于時(shí)間分段和EEMD提取趨勢(shì)項(xiàng)的方法解決異步點(diǎn)跡關(guān)聯(lián)問(wèn)題。首先將時(shí)間進(jìn)行分段,在每一個(gè)時(shí)間段內(nèi),用EEMD方法提取趨勢(shì)項(xiàng),然后用最小二乘法的方法擬合該趨勢(shì)項(xiàng)的表達(dá)式,根據(jù)多項(xiàng)式系數(shù)的統(tǒng)計(jì)檢驗(yàn)結(jié)果進(jìn)行關(guān)聯(lián)判斷以進(jìn)行異步點(diǎn)跡關(guān)聯(lián)。異步點(diǎn)跡關(guān)聯(lián)的模型如下:傳感器A和傳感器B在一個(gè)周期內(nèi)獲得N個(gè)目標(biāo)的異步點(diǎn)跡。傳感器A在第k個(gè)周期內(nèi)的點(diǎn)跡集合為:
(1)
(2)

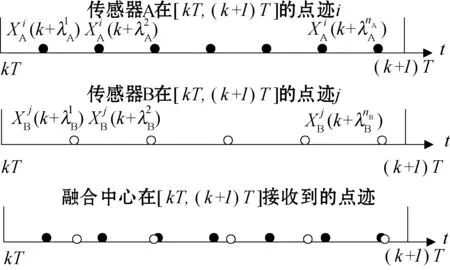
圖2 異步點(diǎn)跡不同速率采樣示意圖
2.1 異步點(diǎn)跡關(guān)聯(lián)的一般方法
異步點(diǎn)跡傳統(tǒng)方法是通過(guò)時(shí)間配準(zhǔn)的方法將異步同步化,基本流程如圖3所示。
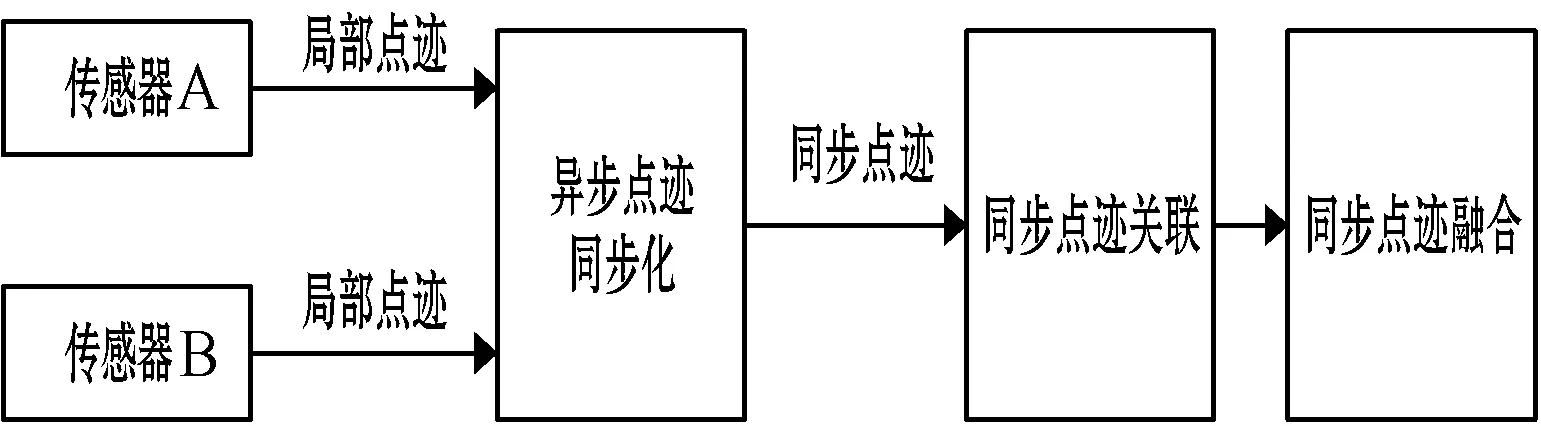
圖3 傳統(tǒng)的處理異步點(diǎn)跡方法基本流程
2.1.1基于最小二乘法的異步點(diǎn)跡關(guān)聯(lián)算法
(3)
(4)
(5)
傳感器A點(diǎn)跡i的所有點(diǎn)的真實(shí)狀態(tài)量為:
(6)
(7)

令:
(8)
(9)
(10)
(11)
在k時(shí)刻的估計(jì)誤差為:
(WA(k)TWA(k))-1WA(k)TVA(k)
(12)
2.1.2基于點(diǎn)跡重構(gòu)的異步關(guān)聯(lián)算法
點(diǎn)跡重構(gòu)就是統(tǒng)一不同時(shí)刻的狀態(tài)估計(jì)值和點(diǎn)跡濾波值到同一時(shí)刻上,當(dāng)所有點(diǎn)跡都重構(gòu)到相同的時(shí)間點(diǎn)上,就完成了時(shí)間配準(zhǔn),如圖4所示。
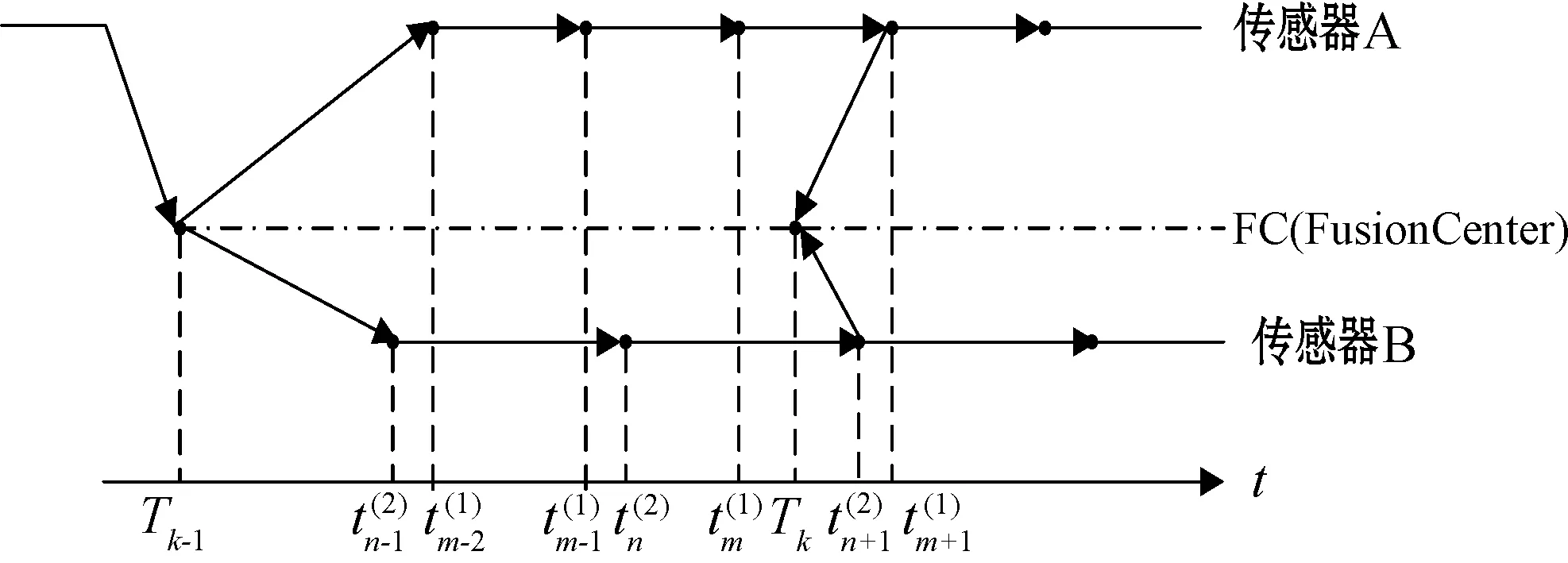
圖4 基于點(diǎn)跡重構(gòu)的異步關(guān)聯(lián)算法結(jié)構(gòu)

將傳感器A和傳感器B在Tk前后時(shí)刻的估計(jì)值外推到Tk時(shí)刻。傳感器A和傳感器B在Tk時(shí)刻的估計(jì)值為X1(Tk,Tk)和X2(Tk,Tk)。點(diǎn)跡目標(biāo)j的狀態(tài)方程為:
(13)
(14)


(15)
(16)

(17)
(18)
(19)
(20)
2.2 基于分段趨勢(shì)項(xiàng)提取的異步關(guān)聯(lián)算法
本文提出了一種基于時(shí)間分段和基于集合經(jīng)驗(yàn)?zāi)B(tài)分解(EEMD)提取趨勢(shì)項(xiàng)的異步關(guān)聯(lián)。該算法的整體框架如圖5所示。
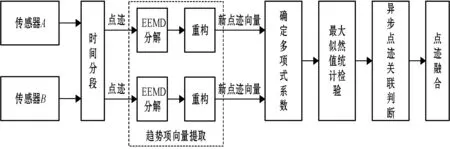
圖5 基于分段趨勢(shì)項(xiàng)提取的異步點(diǎn)跡關(guān)聯(lián)框架
(1)時(shí)間分段。在獲得傳感器的點(diǎn)跡集合內(nèi),如果直接進(jìn)行趨勢(shì)項(xiàng)提取,計(jì)算量很大。如果多項(xiàng)式是低階的,得到的曲線會(huì)過(guò)于粗糙,明顯降低關(guān)聯(lián)效果。由于在每一小段時(shí)間內(nèi),目標(biāo)可以視為做加速運(yùn)動(dòng),因此用二階多項(xiàng)式表示即可。采取的思想是:根據(jù)不同傳感器的異步采樣速率,確保每一段時(shí)間內(nèi),兩個(gè)傳感器的起止時(shí)刻相同或者相似。一個(gè)簡(jiǎn)單的時(shí)間分段如圖6所示。

圖6 時(shí)間分段
白色和黑色分別代表傳感器1和傳感器2,采樣步長(zhǎng)分別設(shè)置為2和3。T1,T2,T3,T4,T5,…代表不同傳感器的相同的采樣時(shí)刻,每?jī)蓚€(gè)采樣相同的時(shí)刻可以作為一個(gè)時(shí)間段。首先將點(diǎn)跡集合進(jìn)行時(shí)間分段,然后在每一個(gè)時(shí)間段內(nèi),采用上述方法進(jìn)行異步關(guān)聯(lián)。
(2)趨勢(shì)項(xiàng)提取。趨勢(shì)項(xiàng)的定義為[12]:信號(hào)中周期大于采樣長(zhǎng)度的頻率部分。在EEMD提取趨勢(shì)項(xiàng)中,如果分解的IMF分量滿足該定義,則滿足條件的IMF分量(一般是低頻的IMF分量)和余量之和就可以作為趨勢(shì)項(xiàng)。如果直接將余量作為趨勢(shì)項(xiàng),則提取的精度低,影響關(guān)聯(lián)的效果。通過(guò)提取趨勢(shì)項(xiàng)再進(jìn)行曲線擬合的方法減小了高頻項(xiàng)作為噪聲擾動(dòng)的影響,通過(guò)趨勢(shì)項(xiàng)的提取,使序列相對(duì)平穩(wěn),因此多項(xiàng)式的階數(shù)不需要設(shè)置為高階,本文將多項(xiàng)式的階數(shù)設(shè)置為二階。
(3)確定多項(xiàng)式系數(shù)。提取的趨勢(shì)項(xiàng)作為新的點(diǎn)跡集合特征向量,在同步點(diǎn)跡關(guān)聯(lián)中可以利用傳統(tǒng)的點(diǎn)跡關(guān)聯(lián)的方法進(jìn)行關(guān)聯(lián)。在異步點(diǎn)跡的關(guān)聯(lián)中,對(duì)應(yīng)的時(shí)間點(diǎn)不是對(duì)齊的,因此,不能利用傳統(tǒng)的點(diǎn)跡關(guān)聯(lián)方法。在每一段時(shí)間內(nèi),比較的是兩個(gè)點(diǎn)跡集合對(duì)應(yīng)的發(fā)展走勢(shì)和形態(tài),這種特征用一個(gè)二階多項(xiàng)式表示出來(lái)。每一個(gè)提取趨勢(shì)項(xiàng)的點(diǎn)跡集合看作一個(gè)二階多項(xiàng)式,這個(gè)二階多項(xiàng)式系數(shù)唯一。在一個(gè)時(shí)間段內(nèi),點(diǎn)跡集合i和點(diǎn)跡集合j如果有相同的發(fā)展趨勢(shì),則它們對(duì)應(yīng)的多項(xiàng)式系數(shù)是接近的,可以通過(guò)接近程度判斷是否相關(guān)。提取的趨勢(shì)項(xiàng)用最小二乘法曲線擬合的方法來(lái)確定多項(xiàng)式的系數(shù),然后對(duì)多項(xiàng)式的系數(shù)進(jìn)行統(tǒng)計(jì)檢驗(yàn)。
(4)最大似然值統(tǒng)計(jì)檢驗(yàn)。用最大似然值統(tǒng)計(jì)檢驗(yàn)的方法來(lái)比較多項(xiàng)式系數(shù)的接近程度,從而判斷這兩個(gè)多項(xiàng)式表達(dá)的點(diǎn)跡是否來(lái)自于同一個(gè)目標(biāo)。用以下二階多項(xiàng)式描述:
(21)
式中:kTi=[miTi,niTi],miTi=Tk,niTi=Tk+1;lTj=[mjTj,njTj],mjTj=Tk,njTj=Tk+1;ai表示點(diǎn)跡集合i要估計(jì)的二階多項(xiàng)式系數(shù);aj表示點(diǎn)跡集合j要估計(jì)的二階多項(xiàng)式系數(shù)。
(22)
Hs=[fs(msTs),…,fs(nsTs)]Ts=i,j
(23)
θs=[as0,as1,as2]Ts=i,j
(24)
式中:[Tk,Tk+1]為第k個(gè)時(shí)間段;Ts表示兩個(gè)傳感器采樣周期;ns-ms+1 (s=i,j)表示每個(gè)時(shí)間段內(nèi)兩個(gè)傳感器的采樣長(zhǎng)度。利用最小二乘法可以得到:
(25)
Lij(x,k)=
(26)
Lij(x,k)、Lij(y,k)、Lij(z,k)就是X、Y和Z方向上在時(shí)間段[Tk,Tk+1]上的最大似然值。
(5)異步關(guān)聯(lián)判斷。根據(jù)上面得到的Lij(x,k)、Lij(y,k)、Lij(z,k),進(jìn)行如下異步關(guān)聯(lián)判斷:
Lij(k)=(Lij(x,k)>δ)∩
(Lij(y,k)>δ)∩(Lij(z,k)>δ)
(27)
式中:δ值為關(guān)聯(lián)門限值,該值通過(guò)經(jīng)驗(yàn)和實(shí)驗(yàn)進(jìn)行設(shè)置。根據(jù)關(guān)聯(lián)質(zhì)量mij的判斷,當(dāng)滿足式(27)關(guān)系時(shí),mij加1。N0次關(guān)聯(lián)檢驗(yàn)中,如果超過(guò)K次滿足該條件,則判斷點(diǎn)跡i和j來(lái)自同一個(gè)目標(biāo)。當(dāng)不止一個(gè)點(diǎn)跡集合判斷為關(guān)聯(lián)時(shí),考慮在每一個(gè)起止時(shí)刻一致的點(diǎn)或者時(shí)間差相差很小的時(shí)刻,可以利用多義性關(guān)聯(lián)判斷。
3 實(shí)驗(yàn)與結(jié)果分析
在各個(gè)點(diǎn)跡集合規(guī)律不同的場(chǎng)景且有一定的誤差條件下,研究目標(biāo)數(shù)目和關(guān)聯(lián)正確率間的關(guān)系。
從第四個(gè)時(shí)刻開(kāi)始,點(diǎn)跡i和j提取趨勢(shì)項(xiàng)后采用最小二乘法擬合出二次多項(xiàng)式的表達(dá)式。通過(guò)算式a=polyfit(x,y,m)(MATLAB函數(shù))求出多項(xiàng)式系數(shù),其中x、y和m分別表示輸入航跡序列的采樣時(shí)間、點(diǎn)跡序列數(shù)據(jù)和擬合多項(xiàng)式的階數(shù),a中存儲(chǔ)的即為二次多項(xiàng)式的系數(shù)。
傳感器A和傳感器B從同一時(shí)刻開(kāi)始采樣,但采樣速率不相同,傳感器A的采樣速率為5 s,傳感器B的采樣速率為7 s。首先在一段長(zhǎng)度為100的航跡片段內(nèi),在傳感器A中選擇了目標(biāo)1的航跡點(diǎn),在傳感器B中分別選擇了目標(biāo)1和目標(biāo)2的點(diǎn)跡點(diǎn),其中目標(biāo)1與傳感器A的目標(biāo)1是來(lái)自于同一個(gè)目標(biāo),并對(duì)這兩個(gè)傳感器的三個(gè)目標(biāo)的點(diǎn)跡利用EEMD的方法提取趨勢(shì)項(xiàng),在X、Y和Z方向上對(duì)這三個(gè)目標(biāo)的點(diǎn)跡集合和趨勢(shì)項(xiàng)提取進(jìn)行仿真,結(jié)果如圖7所示。
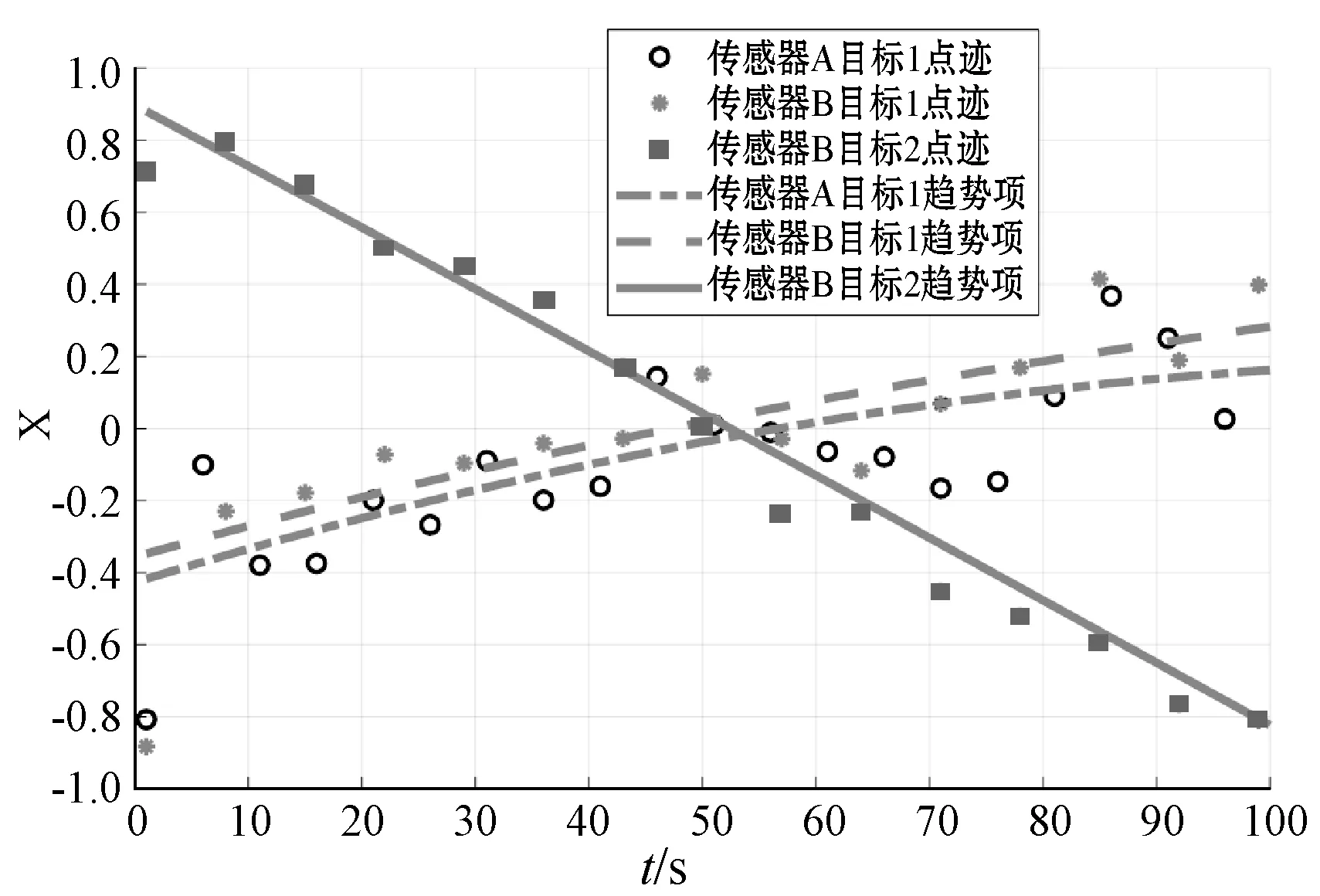
圖7 X、Y和Z方向上異步采樣點(diǎn)和提取趨勢(shì)項(xiàng)顯示結(jié)果
可以看出,傳感器A的目標(biāo)1的趨勢(shì)項(xiàng)和傳感器B的目標(biāo)1的趨勢(shì)項(xiàng)最為接近,這是因?yàn)樗鼈儊?lái)自于同一個(gè)目標(biāo)。
傳感器A的采樣速率為5 s,傳感器B的采樣速率為7 s,仿真中每35 s為一個(gè)時(shí)間段,且只考慮了不同傳感器采樣速率不同的情況,點(diǎn)跡總長(zhǎng)度設(shè)置為350,在每一個(gè)時(shí)間段長(zhǎng)度為35的情況下,將時(shí)間段數(shù)設(shè)置為10,將關(guān)聯(lián)門限值設(shè)置為0.75。將本文算法與基于時(shí)間配準(zhǔn)的KNN算法進(jìn)行對(duì)比分析,兩種算法的仿真結(jié)果如圖8所示。
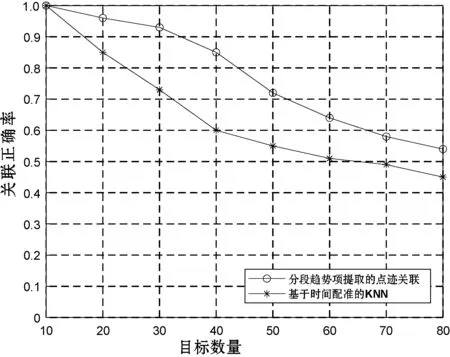
圖8 異步關(guān)聯(lián)點(diǎn)跡不規(guī)則情況下的對(duì)比
可以看出,在點(diǎn)跡不規(guī)則場(chǎng)景下,隨著目標(biāo)數(shù)目的增加,關(guān)聯(lián)正確率下降,基于分段趨勢(shì)項(xiàng)提取的異步關(guān)聯(lián)整體關(guān)聯(lián)效果好于基于時(shí)間配準(zhǔn)后的KNN算法。當(dāng)目標(biāo)數(shù)目在30個(gè)以內(nèi)時(shí),分段趨勢(shì)項(xiàng)提取的異步關(guān)聯(lián)正確率保持在90%以上,然而隨著目標(biāo)數(shù)目再繼續(xù)不斷增加時(shí),關(guān)聯(lián)的正確率下降得也很快。因此,在目標(biāo)數(shù)量適中的場(chǎng)景下,基于分段趨勢(shì)項(xiàng)提取的異步點(diǎn)跡關(guān)聯(lián)算法有較好的關(guān)聯(lián)效果。
4 結(jié) 語(yǔ)
本文采用基于分段趨勢(shì)項(xiàng)提取的異步點(diǎn)跡關(guān)聯(lián)算法研究了異步場(chǎng)景下的點(diǎn)跡關(guān)聯(lián),對(duì)關(guān)聯(lián)方法中的時(shí)間分段、趨勢(shì)項(xiàng)提取、確定多項(xiàng)式系數(shù),以及異步關(guān)聯(lián)判斷進(jìn)行了具體分析,選取了基于時(shí)間配準(zhǔn)的KNN算法與本文方法進(jìn)行了對(duì)比,發(fā)現(xiàn)在目標(biāo)數(shù)量適中的情況下,本文方法有較好的關(guān)聯(lián)效果。在下一步的工作中,將提高方法的實(shí)用性,并提升系統(tǒng)的時(shí)效性。
猜你喜歡
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
第一財(cái)經(jīng)(2021年6期)2021-06-10 13:19:08
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
Coco薇(2017年9期)2017-09-07 21:23:49
讀者(2017年5期)2017-02-15 18:04:18
紡織服裝流行趨勢(shì)展望(2016年2期)2016-05-04 03:47:15
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
汽車科技(2015年1期)2015-02-28 12:14:44