一種船載走航式海氣甲烷交換通量測量系統設計與應用研究
2022-02-01 04:17:52梁前勇陸敬安
海洋技術學報 2022年6期
鐘 超,梁前勇,陸敬安
(1.中國地質調查局廣州海洋地質調查局 自然資源部海底礦產資源重點實驗室,廣東 廣州 510075;2.天然氣水合物勘查開發國家工程研究中心,廣東 廣州 511458;3.中國地質調查局天然氣水合物工程技術中心,廣東 廣州 511458)
在相互制約的大氣海洋系統中,海氣界面物質交換是實現海洋和大氣相互作用的重要途徑,其通量代表了海洋與大氣物質交換幅度。了解海氣通量變化特征對研究海氣界面碳循環過程、碳收支通量和全球氣候變化具有重要意義[1],人為活動和自然過程的耦合作用對海洋CH4源匯過程及其海—氣交換通量時空演變的影響越來越受到關注和重視[2-5]。因此海洋與大氣之間碳交換研究至關重要,有必要將海洋大氣和海水中溶存甲烷含量分布特征有機結合起來,開展同一時空下海氣交換通量觀測及海—氣循環過程研究,評估海氣通量對氣候環境變化的影響。
最早的海水中溶解態CH4觀測始于20世紀50年代的吹掃捕集—氣相色譜法[6]。隨后,基于道爾頓氣體分壓定律和亨利定律,海洋科學家陸續開發出頂空平衡—氣相色譜法[7],真空脫氣—氣相色譜法[8],膜法[9]和水汽平衡器—光腔衰蕩光譜法[10-11]等海水中溶解態CH4的觀測技術。目前海表大氣甲烷測量一般采用頂空平衡—氣相色譜法[7],表層海水溶存甲烷測量一般采用吹掃捕集—氣相色譜法[6]。這些傳統的氣相色譜法存在穩定性較差,運行成本較高,線性較差等問題[12-13],還需進行現場離散采樣及陸地實驗室測定,只適合靜態水體的觀測,不適合海洋大區域長期測量,且樣品在采集、運輸的過程中難免發生損耗,在一定程度上影響了測量精度。前人研究資料表明海洋大氣甲烷濃度分布特征呈現明顯時空不均勻性[14-15],且海洋大氣和海水溶存甲烷觀測方式結合不足,無法實現同步測量[16]。國內外海洋領域學者在計算海氣界面甲烷交換通量時,多數采用鄰近海域定點觀測的大氣本底和歷史數據[17],甚至是全球大氣甲烷濃度年平均值[18],給海氣甲烷交換通量計算結果帶來了一定的誤差[19]。因此,有必要開展海洋大氣甲烷和表層海水溶解態甲烷的現場同步觀測,以獲取同一時空尺度下海表大氣和表層海水溶解態甲烷數據,提高海氣甲烷交換通量觀測效率和計算精度。
本文基于梯度法研制了海氣甲烷交換通量自動測量系統,通過表層海水采樣及溶解氣體分離裝置和數據采集模塊,實現了海表大氣及表層海水甲烷同步走航測量。針對系統算法需求,采用面向對象編程思想和C#、JavaScript語言在Windows平臺下設計流式數據存儲、處理的可視化軟件,通過通信串口獲取各模塊采集的數據,基于LISS P S等[20]和WANNINKHOF R[21]給出的公式編程實現了甲烷交換通量的自動計算,并以圖形化窗口實時顯示,且支持離線數據導入計算、歷史數據回看功能。相比傳統海氣界面甲烷通量測量方法,本系統可替代業內手動取樣分析測試離線計算的方法,在數據獲取方面具備高效性和實時性,避免了樣品在采集、運輸過程中損耗,有效提高了通量計算效率,可實現船載走航長周期測量,為后期研究多尺度海氣相互作用及全球氣候變化提供重要的技術手段。
1 系統設計方案及研究內容
1.1 硬件系統概述
水氣甲烷交換通量自動測量系統由采集系統、中控系統及輔助系統構成[22],如圖1所示。

圖1 系統構架圖
1.1.1 采集系統
采集系統由海水大氣采集模塊和氣象觀測模塊組成。其中,海水大氣采集模塊是前置核心部分,海水采集部分模塊中由蠕動泵從探槽處將表層海水輸送至表層海水采樣及分析裝置中,實時測量海水溶解CH4、CO2含量;大氣采集部分由氣泵抽入海表大氣輸送至氣體分析儀中,實時測試氣體含量(主要是CH4、CO2)及氣體中碳同位素比率;氣象觀測模塊主要觀測水平真風速、真風向等要素。
1.1.2 中控系統
中控系統由兩部分組成,其中“數據采集與存儲系統”負責控制數據采集時序并存儲數據,“供電單元”則為整個裝置提供所需電力,滿足長期測量的需求。
1.1.3 輔助系統
輔助系統包括傳感器專用安裝支架及附件,對各傳感器安裝固定;定位模塊通過GPS裝置獲取位置等信息。
1.1.4 工作原理及硬件結構
系統通過表層海水、海表大氣采樣及溶解氣體前置分離裝置將樣品輸入氣體分析儀中檢測,結合中控系統采集的氣象、GPS等數據,經過整合、計算得出海氣通量,并實時在用戶終端顯示,系統技術路線及硬件結構圖如圖2和圖3所示。

圖2 系統技術路線圖

圖3 系統硬件結構圖
氣體分析裝置采用美國Picarro公司G2201I,可測量高低濃度甲烷氣體。海水原位測量裝置采用德國Contros公司HydroC走航甲烷傳感器,基于調諧半導體激光探測器線寬窄的優勢,可精確地探測水中的甲烷分子含量。氣象監測系統使用的美國Rainwise公司PortLog氣象傳感器,可測量風速風向/溫濕度/降雨量等氣象要素,配置有GPS系統,可實現定位功能。海氣交換通量自動測量模塊采用基于ARM Cortex-M4內核的STM32L471ZG單片機為主CPU,該CPU主頻高達80 M,具有超低功耗、外圍接口豐富、獨立FSMC等特點,能方便擴展片外靜態隨機存儲器;配合外部接口電路,中央集成控制器具有多路模擬輸入、脈沖信號計數、多路電壓控制輸出、多路數字量輸入輸出等接口,外部采用12VDC外接可充電電池供電,系統主要技術指標件如表1所示。
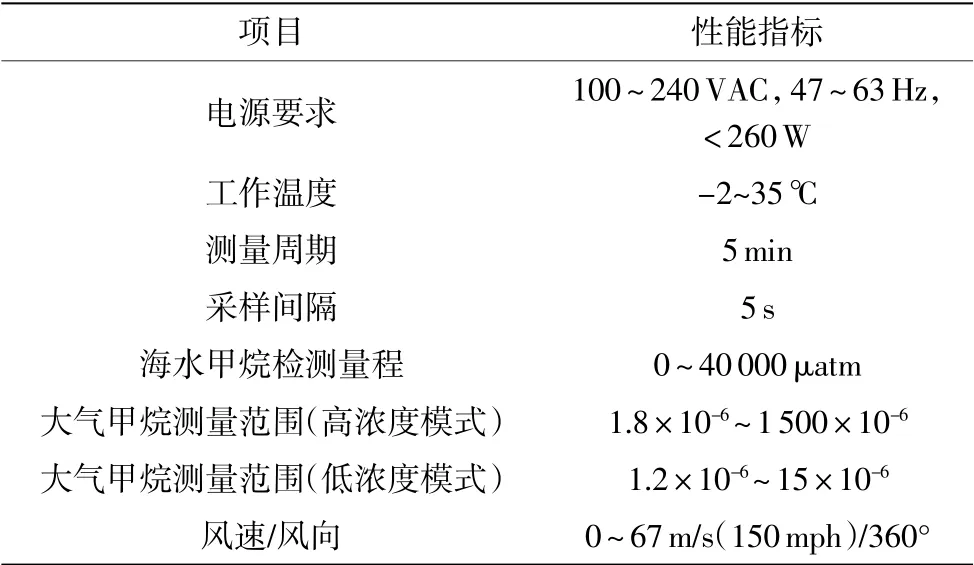
表1 系統主要技術指標
1.1.5 計算方法
海水中溶解CH4的飽和度R(%)及海—氣交換通量F可由下列公式計算得出。

式中,k為氣體交換速率(cm/h);Cobs為溶存氣體在表層海水中的濃度(nmol/L);Ceq為表層海水中的氣體與大氣達平衡時的濃度,由系統傳感器實測得出。氣體在界面處遵守亨利定律,該模型將k定義為風速和氣體SC數(Schmidt Number)的函數(表2),其中SC數為水的動力粘度與待測氣體分子擴散速率之比,對于特定氣體,SC數與水溫、鹽度等物理參數有關。WANNINKHOF R等[23-24]給出了海水中甲烷氣體SC數與水溫T的關系式(3),T為海水表面溫度,可通過溫度傳感器實測得出。
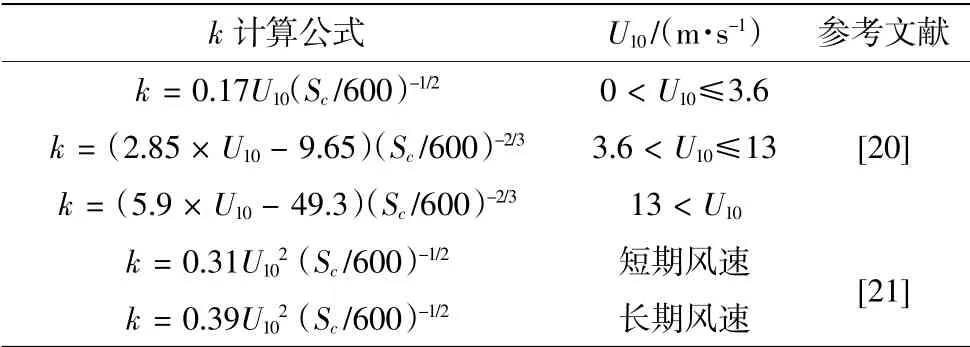
表2 與風速相關的k函數

通常利用Liss and Merlivat公式[20]、Wanninkhof公式[21]來計算k,分別代表了對海—氣交換通量估算的較低值與較高值。海平面獲取的原始風速可通過冪次法則換算至10 m處的風速[25],其中,H1和H2表示海平面以上的高度U1和U2為對應高度的風速,公式如下。

1.1.6 控制方法
采集系統按照預定程序開始工作,由表層海水采樣及溶解氣體前置分離裝置和海表大氣采樣裝置將樣品送至氣體分析儀分解得到表層海水及海表大氣中溶解甲烷含量,同時氣象觀測模塊采集基本環境參數(水平真風速、真風向)。控制系統通過上位機軟件讀取RS232串口中各模塊采集的數據并存儲。
當控制單元得到指令后,根據所獲得各監測模塊(海水大氣采集模塊和氣象觀測模塊)信息制作成裝置的工作時序表,當控制工作開始后,通過通訊系統GPS授時,將各采集模塊同步到統一時間軸內,每次獲取到時間信息后,都查詢時序表,一旦相關動作時間到達,控制單元發出控制信號,具體流程圖如圖4所示。
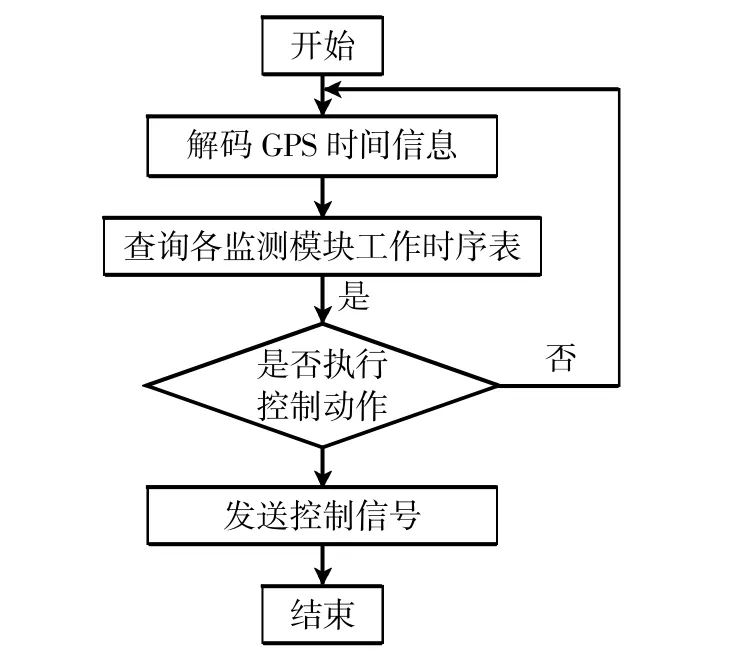
圖4 控制方法流程圖
程序運行后,將首先初始化系統資源,然后初始化串口,并創建讀串口線程,各監測模塊通過串口將數據發送至串口,然后進入命令執行的等待循環中,在這個過程中若沒有其他消息觸發,將一直做讀串口循環。通過處理函數,將海水表層溶解氣體含量、風速、溫度等數據匯入(Liss and Merlivat 92、Wanninkhof 86)經驗公式[20-21]中計算生成交換通量。若需要數據庫操作,上位機軟件將創建新的進程,分配新的系統資源來完成數據處理,可將每個測點,每條測線的信息分類梳理入庫,提高記錄和檢索信息的效率。
1.1.7 系統船載集成方式
為了避免調查船煙囪廢氣和甲板工作人員活動的影響,海表大氣采集分析裝置進氣口固定于調查船前艙最高處,距海面約10 m。進氣口安裝倒錐形外罩和干燥管,以避免水汽和顆粒物進入氣路,對儀器內部光腔產生不利影響。將抽水管置于調查船水文室探槽底部(距船底3 m處)通過離心泵抽取淺表層海水,利用海水原位測量裝置實現對表層海水溶存甲烷含量監測。氣象傳感器及定位設備安裝于調查船桅桿上,通過延長電纜與系統各模塊相連,建立了一套適用于海洋大氣和海水甲烷連續同步測量系統(圖5),可滿足船基走航海氣甲烷交換通量連續觀測的實際需求。

圖5 船基走航測量方式
1.2 軟件方案
1.2.1 開發環境選擇
選擇在Windows平臺下采用C#語言開發數據采集存儲模塊,C#是一種穩定的、簡單的、高效的面向對象的編程語言,具有快速數據操作流、界面顯示功能,用于進行串口通信及數據存儲[26]。JavaScript是由客戶端瀏覽器直接編譯運行的單線程語言,是簡化的函數式編程語言和面向對象編程語言混合的產物。JavaScript主要由ECMAScript、文檔對象模型、瀏覽器對象模型組成,ECMAScript實現JavaScript語言語法描述,文檔對象模型文檔對象模型(Document Object Model)是用于處理網頁內容方法的接口,瀏覽器對象模型瀏覽器對象模型(Browser Object Model)實現與瀏覽器的交互[27]。JavaScript程序設計語言擁有簡單、高效、動態性、交互性、跨平臺性、解釋型和輕量級等特點。其操作運行不需要公共網關接口(Common Gateway Interface)做出驗證操作,能夠直接響應客戶發送的命令和操作,執行效率高,速度快,為廣大Web用戶帶來了良好的體驗[28]。系統數據圖形顯示通過Echarts來實現,Echarts是一個純Javascript的圖表庫,底層依賴輕量級的Canvas類庫ZRender,能提供可交互、可高度個性化定制的數據可視化圖表[29]。
1.2.2 軟件功能
海氣甲烷交換通量計算的核心部分是在上位機的界面軟件中進行,軟件支持實時和離線兩種運行模式(圖6),通過菜單欄“模式選擇”中可以進行切換。實時模式下,首先需連接設備串口進行COM端口設置,待端口配置完畢軟件會自動從各模塊中獲取數據,界面圖表每隔5 s刷新一次,可隨時切換大氣、海水、通量、軌跡及熱力圖子界面(圖7)。實時模式下獲取的數據會實時保存到本地數據庫中,支持離線模式下查詢。離線模式下,圖表不會自動刷新,需要手動選擇時間區間進行數據篩選。

圖6 軟件初始界面

圖7 軟件運行界面
偏差校正:在進行試驗測量的過程中,經常需要對儀器進行校準,一般是通過通入一段時間的標準氣體來進行測量矯正。軟件中支持設置某一時間段的測量值為標準氣體的測量值(圖8),會將該時間段的數據計算得出儀器的測量值偏差,后續采集到的數據會自動根據該偏差進行校準。

圖8 標準氣體時段設置
2 碼頭試驗
為了驗證系統各模塊功能完備性、接口通信及軟件的可靠性,在三亞鳳凰島碼頭將該套系統部署在“海洋地質四號”調查船內并開展了相應調測試驗,其中海表大氣采集分析裝置進氣口固定于調查船二層甲板離海表10 m處位置,通過氣泵原位抽取海表大氣完成海表大氣甲烷含量采測。在調查船水文與海底攝像室內有探槽管道通向船底(距離船底3 m處),通過離心泵原位抽取海水至表層海水分離、測量裝置內完成海水甲烷含量采測。氣象監測裝置布放在船頭中控室旁,通過電纜連接至終端采集系統(圖9)。
經過初步碼頭測試,系統海表大氣采樣裝置、表層海水采樣裝置及數據分析處理終端運行正常,各數據接口通訊正常,可同步顯示大氣、海水甲烷含量,船載走航過程中能實時定位,航次期間,系統氣象傳感器出現故障,因此風速數據由調查船上的數字氣象儀提供。通過實時/離線獲取錄入各模塊數據結合經驗公式計算海氣甲烷交換通量、繪制了通量變化分布圖(圖10),驗證了海水走航式甲烷現場采測技術和海氣界面交換通量計算方法的思想框架和軟件系統的可行性。
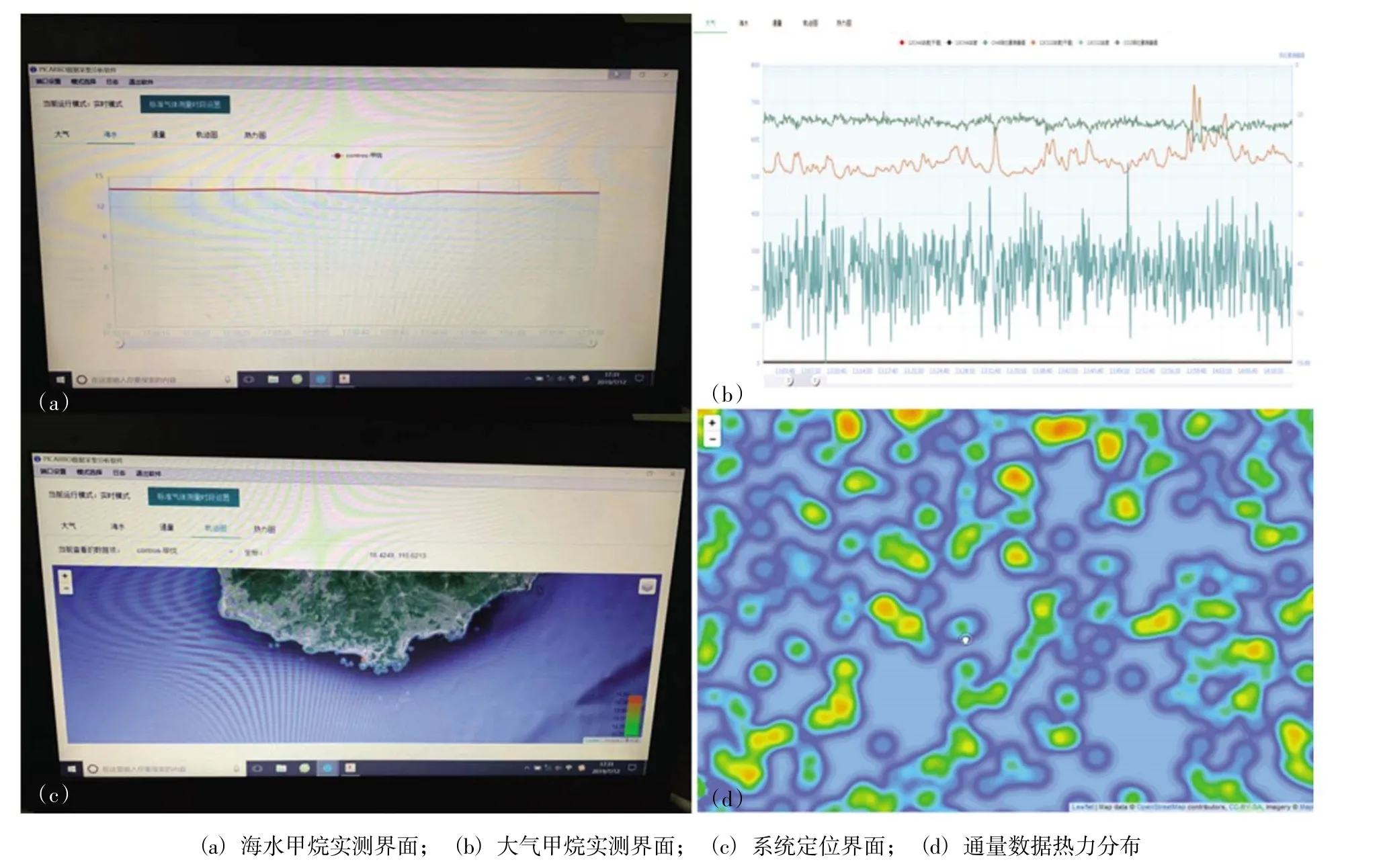
圖10 系統碼頭測試狀況
3 結論與展望
基于梯度法和“Liss and Merlivat、Wanninkhof”經驗公式研制了船載海氣甲烷交換通量測量系統,通過表層海水采樣及溶解氣體分離裝置和數據采集模塊,實現了海表大氣及表層海水甲烷同步采測,替代了傳統站位式取樣分析測試方法,在數據獲取方式上實現了大氣、表層海水甲烷測量從站位式現場離散采樣到走航式連續同步測量的轉變,有效避免了樣品在采集轉運過程中的損耗,一定程度上提高了海氣通量觀測效率與計算精度。
基于C#、JavaScript語言設計了上位機顯示軟件,軟件界面簡潔直觀、操作簡單,能夠實時或離線顯示系統獲取的海表大氣、海水甲烷含量及海氣界面基本氣象要素(風速、風向),并自動計算甲烷海氣交換通量。開發了基于離線地圖數據可視化通量熱力圖組件,使用強度色譜實現觀測數據強弱的數值與顏色一一映射,實現了調查船航跡定位及海氣甲烷通量分布圖顯示。
本系統基于碼頭試驗及短途走航初步驗證了系統方案設計可行性。后期將繼續開展船載環境適配性及海上浮標端定點監測系統集成研究,擴展水氣界面環境參數實時回傳功能,為海洋環境監測及海氣界面相互作用研究提供高質量的水氣界面實時觀測數據,進一步提升海洋環境應急機動觀測、現場保障、防災減災等預警報能力。
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
