潛標錨泊系統靜姿態與渦激振動時頻分析
2022-02-01 04:18:16陳廷威張學剛宋憲倉
海洋技術學報 2022年6期
陳廷威,張學剛,呂 帥,宋憲倉
(1.中國海洋大學工程學院,山東 青島 266100;2.中國船舶重工集團有限公司第七六〇研究所,遼寧 大連 116001)
單點系泊潛標系統是一種較為普遍的海洋信息獲取裝備,通過在潛標系統上面懸掛各種功能設備測量不同的海洋環境指標,目前已被各國廣泛應用。一般在潛標系統布放之前,需要根據具體用途及相關海域的實際情況,對系統整體的設備布置、浮力配置和連接方式進行設計,對系統的靜姿態和動力特性進行分析。由于海流、波浪等復雜流體的作用,系纜周圍會產生漩渦,進而在垂直于軸向和來流的方向產生周期性交變力,引發錨泊系統的渦激振動。嚴重時會干擾信號,限制測量儀器的穩定性和靈敏性[1],所以有必要對潛標錨泊系統的渦激振動特性進行深入研究。
已有一些學者對潛標系統的靜力特性進行了研究。齊占峰等[2]通過編制程序,模擬在不同海流條件下潛標系統的姿態和受力問題;馬龍等[3]進行了深海潛標系統的姿態模擬計算和優化配置分析;王蓓等[4]對一套潛標進行了建模分析,對潛標異常沉降問題進行了探究。潛標系統靜力分析的理論本身并不復雜,但是靜力分析的結果與實際海試結果仍具有一定的出入,靜力分析的準確性有待提高。針對潛標錨泊系統渦激振動的研究實際上是研究細長圓柱體的渦激振動響應,而且相較于研究較多的潛標靜力分析,時域渦激振動的研究相對較少。常用的渦激振動研究方法可分為三類:一是實驗法,包括實海實驗與模型實驗;二是數值模擬法,YAMAMOTO C T等[5]用數值模擬的方法研究了柔性圓柱渦激振動;三是理論推導經驗模型法,在理論基礎之上加上實驗數據結果進行修正,本文采用此類方法。
本文研究目標是通過對錨泊系統靜姿態的計算和渦激振動振幅與頻率的分析,為潛標系統在浮力配置、設備安排等方面提供依據。
1 基礎理論
1.1 靜力分析
要實現潛標錨泊系統的模擬計算分析,需要將連續的結構體離散成有限個單元,采用獨立的質量點來描述每個單元的質量,利用無質量的彈簧來描述每個單元的剛度[6]。由于潛標的主體位于水面以下,在靜力分析過程中,除了自身的重力和浮力外,僅需要考慮海流的影響,取錨泊系統第i個單元進行受力分析,如圖1所示。

圖1 靜力分析圖
作用在第i個單元上的荷載包括重力Gi、浮力Fi,3個方向上的拖曳力Qxi、Qyi、Qzi和兩端系纜的拉力Ti、Ti+1。單元上半段與z方向的夾角為φi,在x-y平面上的投影與x軸的夾角為θi,單元下半段與z方向的夾角為φi+1,在x-y平面上的投影與x軸的夾角為θi+1。由此可得3個方向的受力平衡方程,見式(1)、式(2)和式(3)。

在海流拖曳力的作用下,經過多次迭代計算,潛標系統由初始狀態慢慢趨向于平衡狀態,并可據此推算單元的位置和偏角信息,其中作用在系纜上的拖曳力可以通過式(4)計算。

式中,ρ為海水密度;j=j(x,y,z);CDj為j方向上的拖曳力系數;Aj為j方向上的拖曳面積;vj為j方向上的流體相對于設備的速度,v是流體總流速。
1.2 時域VIV模型
當水流流經潛標系纜時,由于流體的粘性效應,邊界層將會發生分離從而產生渦泄,進而在系纜周圍產生周期性的壓力變化,這種變壓力產生的渦激力將會引起潛標系纜的渦激振動。根據渦激振動的機理提出理論經驗模型模擬并對模擬結果進行分析論證是研究渦激振動的主流方法。OrcaFlex軟件嵌入了5種理論經驗模型,如圖2所示。

圖2 時域模型分類圖
尾流振子模型[7]是一種單自由度預測模型,只模擬橫向的VIV運動,是尾流運動方程和圓柱運動方程的耦合。基于這一理論的米蘭模型[8]由意大利團隊開發,米蘭原創模型與米蘭“Ca=0”模型的區別在于Ca的取值,前者Ca=1.0,后者Ca=0。Iwan and Blevins模型是由Iwan和Blevins從動量理論的角度發展而來的,并根據固定和受迫圓柱的實驗結果對模型進行了校準,然后將模型的預測與相應的實驗結果進行了比較。
渦追蹤模型比尾流振子模型計算量大得多。它們基于邊界層理論的基本物理方程和Navier-Stokes方程,是一種模擬了全流場的計算流體動力學模型,這種方法重點在于追蹤渦量,而且渦量常常局限于狹窄的片狀區域,從計算的角度來看,這樣做效率要高得多。渦追蹤模型1是對最初的渦追蹤模型的實現和發展,它使用可變時間步長,渦追蹤模型2是對渦追蹤模型1的簡化,使用定時間步長,兩種模型分別側重于計算精度和計算效率。
2 潛標系統靜態驗證
本文使用蘭志剛等[9]在文中提到的潛標系統進行建模計算,與其計算結果進行對比驗證,證明潛標系統和環境參數設置的正確性,同時也為后續系纜渦激振動計算提供靜態信息。根據該文獻,對于拖曳力系數,直徑較大的球體取為0.65,直徑較小的球體取為1.0,圓柱體取為1.0~1.3。
2.1 潛標系統介紹
潛標布放海域水深1 200 m,潛標長度700 m,具體布置如圖3所示。

圖3 700 m潛標系統布置圖
潛標系統主要設備具體參數見表1和表2,表中拖曳面積對應的方向順序為x、y、z。海流剖面流速可以通過公式(5)計算得到。

表1 主要設備相關參數

表2 Kevlar相關參數

合流速計算見公式(6)。

式中,Ux為x方向流速;Uy為y方向流速;U為合流速;z為距底面高度。
2.2 結果對比分析
根據以上潛標系統配置,在OrcaFlex中建模計算獲得潛標系統的姿態、張力和偏角數據,如圖4所示。圖4(a)、圖4(b)和圖4(c)分別為計算平面姿態、系纜拉力和系纜沿水平偏角與原文獻結果的對比。
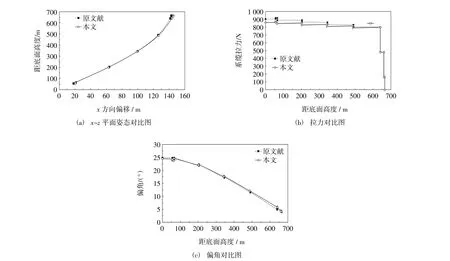
圖4 本文和原文獻的姿態、拉力和偏角對比
根據數據統計,本文與原文獻x-z平面相同位置最大高度偏移為3.4 m(0.48%),最大上端張力差為171.5 N,最大下端張力差為130.3 N,最大上端偏角差為0.4°,最大下端偏角差為0.4°。根據以上x-z平面姿態、拉力和偏角的對比,兩者吻合情況較好,表明潛標系統和環境參數的設置與原文獻基本一致,可以作為后續渦激振動計算的基礎模型。
3 時域模型優選
本文基于CHAPLIN J R等[10]在Delft實驗室進行的立管模型實驗,對該模型實驗獨立建模計算,并且與模型實驗結果和OrcaFlex官方驗證結果[11]分別做了對比驗證并優選出后續所用的時域模型。
3.1 Delft模型實驗介紹
實驗水池深6.5 m,水池中有一個大型鋼結構制造的運動部件,部件底部為立管提供一個剛性的安裝點,上端固定有一個7.54 m高的真空罐,通過從上端抽取空氣形成負壓,當真空罐開口處于水下時,大氣將水壓入真空罐上部,將長為13.12 m的立管安裝在底部的剛性安裝點和真空罐頂部的連接處,底端距離水底0.36 m,圖5為Delft實驗示意圖。當運動部件按照設定工況運動時,下端由于相對運動造成一個均勻流,上端由于立管與真空罐內的水保持相對靜止,所以上端立管在運動過程中處于靜水狀態。

圖5 Delft實驗示意圖
3.2 階躍流作用下的響應
模型在階躍流的作用下與立管發生動力響應,階躍流的計算方法見公式(7)。

式中,h為立管從頂端到下部各點的長度;k為拖曳速度,其值與實驗工況有關,表3給出了9種實驗工況下的拖曳速度和頂張力數據。對5種時域模型分別計算以上9種工況,進而可以將計算結果與已有結果進行對比。

表3 9種工況下的拖曳速度和頂張力
3.3 相關分析
針對5種模型的系纜振動最大位移計算結果,在每條包絡線上取出83個點作為每種模型工況的特征點進行相關計算分析,相關分析指標選擇RSquare。R-Square為決定系數,可以表征一種變量被另一種變量解釋的程度。每種模型的9種工況對應一個相關分析數值,對其取平均得到該模型的相關分析結果,表4是5種模型的相關分析結果對比。

表4 本文、實驗和軟件官方相關分析結果對比
根據相關分析結果可知,本文計算結果與OrcaFlex官方提供的結果吻合度較高,具有較高的可信度;本文計算結果與Delft模型實驗測量結果應用米蘭原創模型計算相關性最高,故選用米蘭原創模型作為后續VIV時域分析的經驗模型。
4 700 m潛標渦激振動計算與分析
根據上節優選方案,選擇米蘭原創時域模型作為700 m潛標渦激振動時域計算模型。在保證示例其他條件不變的情況下,選取表面流速分別為0.25 m/s、0.5 m/s、0.75 m/s、1.0 m/s、1.25 m/s、1.5 m/s、1.75 m/s、2.0 m/s,計算不同流速下的渦激振動響應,流速剖面如圖6所示。

圖6 8種工況流剖面圖
每種工況的計算時長為300 s,根據計算結果,8種工況下節點渦激振動最大主周期不到1 s,選取100~300 s作為時域分析時間段,可以充分保證分析時間段為穩定的渦激振動段。
4.1 節點時域圖
為直觀表征8種工況下VIV的時域振動特性,選取系纜主浮體位置和第2個玻璃浮球位置的100~300 s的時域位移圖進行分析,如圖7和圖8所示,圖7(a)和圖7(b)是主浮體處前4種工況和后4種工況時域圖,圖8(a)和圖8(b)是370 m處浮球前4種工況和后4種工況時域圖。

圖7 主浮體時域圖
一般節點的位移振動原點在姿態原點位置,從圖7(a)和圖7(b)中可以看出主浮體在0.25 m/s和0.5 m/s工況下時,位移振動原點還在姿態原點;而后6種工況下,主浮體的振動原點位置發生了偏移,且在200 s時發生突變。圖8(a)和圖8(b)可以代表系纜上絕大多數節點的振動狀態,從位移振幅看,隨著流速不斷增大,整體上呈現下降趨勢,后幾種工況下位移振幅趨于振蕩;從位移形態看,隨著流速的增大,振動越來越紊亂,周期性越來越不明顯,但都是圍繞姿態原點的振動。

圖8 370 m處浮球時域圖
4.2 幅值分析
從時域位移圖中取振幅最大值,每隔1 m取一個節點,8種流速工況每兩個工況成一個圖,如圖9至圖12所示。圖9至圖12分別為0.25~0.5 m/s、0.75~1.0 m/s、1.25~1.5 m/s和1.75~2.0 m/s工況下沿系纜最大振幅對比圖。
從圖9中可以看出,低流速下沿系纜的最大振幅整體波動較大,呈現一定的周期性特征,而對于流速較高的工況,除一些特別點(如220 m處)外,沿系纜的最大振幅基本維持在高位,如圖10、圖11和圖12所示。從圖中也可以看出,隨著流速的增大,渦激振動激發的系纜振動模態逐漸增多。

圖9 0.25~0.5 m/s系纜最大振幅對比圖

圖10 0.75~1.0 m/s系纜最大振幅對比圖

圖11 1.25~1.5 m/s系纜最大振幅對比圖

圖12 1.75~2.0 m/s最大振幅對比圖
不同流速工況下的計算結果也具有一些相似的幅值變化規律,在3個浮球(220、370、520 m處)和75 kHz ADCP(675 m處)布置位置處幅值有明顯的降低,說明系纜設備對于系纜本身的渦激振動幅值有抑制作用;對于該潛標系統,每種工況的振幅/直徑的最大值和最小值相差不大,最小值在0附近,最大值在1.6~1.8;系纜底部由于錨定的作用幅值逐漸衰減到0。
4.3 頻率分析
對于頻率分析,時間步長的選擇對于計算結果的準確性有很大的影響。過大的時間步長捕捉不到較大的頻率,過小的時間步長則會造成計算資源的浪費。圖13是1.75 m/s和2.0 m/s兩種工況下分別在時間步長0.01 s、0.005 s和0.001 s下沿系纜主頻率的對比圖。由圖13可知,0.01 s的時間步長已經足夠滿足對潛標系統渦激振動頻率的捕捉,故最終選擇的時間步長為0.01 s。

圖13 沿系纜2種工況3種時間步長的頻率對比圖
以時域位移數據為基礎,對每種工況進行頻率計算并處理,取其主頻。每隔25 m取一個點,圖14是8種工況下沿系纜25~700 m主頻率的對比圖。

圖14 8種工況下沿系纜主頻率對比圖
從圖14中可以看出,當系纜高度保持不變時,隨著流速越來越大,主頻率越來越大,但是增大的幅度總體上在減小。對于同一流速工況,隨著距底面高度的增大,主頻率也呈現逐漸增大的趨勢。在距底面高度25~675 m之間,3個玻璃浮球將系纜主要分成4段,每一段的系纜節點主頻基本保持不變;在玻璃浮球處,系纜振動頻率會發生躍變,下一段以一種新的頻率振動。在675~700 m之間,存在2個ADCP和1個主浮體,主頻率發生較大的躍變。結合圖4(b)中的拉力變化規律,可以發現頻率變化是由對應的拉力突變導致的。
系纜渦激振動頻率一般在50 Hz以下,隨著流速的增加,振動的穩定性變差,但仍然保持上述規律。因此,對于系纜設備的這種調頻功能,可以通過對潛標系統設備和位置的調整,從而控制系纜上的主頻率變化;根據系纜VIV頻率振動的特性,可以為水聽器等探測設備在分辨率的選取提供依據,為探測結果提供分析素材。
5 結論
本文基于集中質量原理,使用OrcaFlex軟件對蘭志剛等[9]的一套深水潛標系統進行了靜力驗證,其靜態姿態、系纜張力與偏角均吻合良好,表明潛標系統和環境參數的設置與原文獻基本一致,可以作為后續渦激振動計算的基礎模型。
根據優選出的米蘭原創時域模型計算了8種流速工況下系纜的靜態和渦激振動響應,展示了兩個特殊點的時域位移圖,并對系纜時域位移從幅值和頻率兩個方面進行了分析。隨著流速的增大,主浮體的沉降越來越大,潛標整體的偏移量也越來越大。低流速下的渦激振動最大振幅波動較大,較高流速下的最大振幅基本維持在高位;在有設備存在的地方,振幅會顯著減小,8種工況下的振幅/直徑范圍都在0~1.8之間,并無太大的區別。對頻率而言,當系纜高度保持不變時,主頻率隨著流速的增大而增大,但是增大的幅度總體上在減小。對于同一流速工況,隨著距底面高度的增大,主頻率也呈現逐漸增大的趨勢。在浮球或設備處,系纜主頻由于拉力突變而發生躍變;渦激振動頻率大小一般在50 Hz以下。
對于該潛標系統,設備的位置設置至關重要。在設備周圍,系纜VIV振動最大振幅會變得很小,所以對于系纜振動振幅有要求的水深可以通過設置設備來減小振動。在設備處,系纜拉力會發生突變,通過調整設備的位置可以改善整條系纜的拉力狀況,也可以控制整條系纜VIV頻率躍變的位置,調整系纜的振動頻率分布。根據渦激振動不同工況的頻率規律,可以與其他非同頻噪聲區別開,在探測海洋噪聲時可以作為水聽器等設備的選擇依據。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
數學物理學報(2017年6期)2018-01-22 02:26:40
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
