一種仿揉搓和捶打的清洗系統(tǒng)*
2022-02-07 07:45:42趙俊豪
裝備機械 2022年4期
鄭 煜 徐 興 薛 攀 趙俊豪
1.陜西工業(yè)職業(yè)技術(shù)學院 機械工程學院 陜西咸陽 712000 2.陜西理工大學陜西國防工業(yè)職業(yè)技術(shù)學院分院 智能制造學院 西安 710300 3.中國航發(fā)西安動力控制科技有限公司 西安 710077
1 設(shè)計背景
清潔效果好、被清洗物損傷小一直是使用者對清洗系統(tǒng)清洗效果的期望,然而,傳統(tǒng)清洗方案存在不同程度的問題。滾筒式清洗耗水耗電,機身重,維修成本大,洗滌時間長。波輪式清洗清潔程度低,衣物易打結(jié)損傷高,適用材質(zhì)少,耗水量大。在現(xiàn)有清洗方式中,手洗兼顧效果與效率,同時兼具被清洗物損傷小、適應(yīng)材質(zhì)廣、節(jié)水節(jié)電、清洗迅速等諸多優(yōu)點。對此,筆者在充分借鑒手洗清潔方式的基礎(chǔ)上,設(shè)計了一種仿揉搓和捶打的清洗系統(tǒng),意在解決現(xiàn)有清洗方案中存在的諸多問題。
2 原理
清洗系統(tǒng)主體由基本系統(tǒng)、連桿機構(gòu)、智能控制系統(tǒng)組成。基本系統(tǒng)負責上下水、漂洗、脫水、烘干等工作任務(wù),連桿機構(gòu)負責仿揉搓和捶打方式清洗,智能控制系統(tǒng)負責清洗系統(tǒng)各電氣環(huán)節(jié)的控制與智能功能。
基本系統(tǒng)如圖1所示。水流由進水管輸入,在清洗前,被分為兩路。一路經(jīng)進水閥門1混合洗滌劑盒中的洗滌劑,由集水桶進入滾筒中,另一路直接由集水桶進入滾筒。過濾器和排水閥門位于儲水槽內(nèi),此時關(guān)閉。清洗時,進水閥門1和2關(guān)閉,排水閥門保持關(guān)閉,被清洗物在滾筒內(nèi)由連桿機構(gòu)進行清洗。漂洗時,排水閥門關(guān)閉,進水閥門1關(guān)閉,水流直接經(jīng)進水閥門2進入集水桶,滾筒電機經(jīng)大小帶輪組成的帶傳動,帶動滾筒轉(zhuǎn)動完成被清洗物漂洗。脫水時,進水閥門1和2關(guān)閉,排水閥門打開,滾筒電機驅(qū)動滾動高速轉(zhuǎn)動完成脫水。在所有工作流程中,當需要排水時,水流從集水桶流經(jīng)過濾器,隨即排放至儲水槽中,排水閥門打開,水流經(jīng)排水管排出。
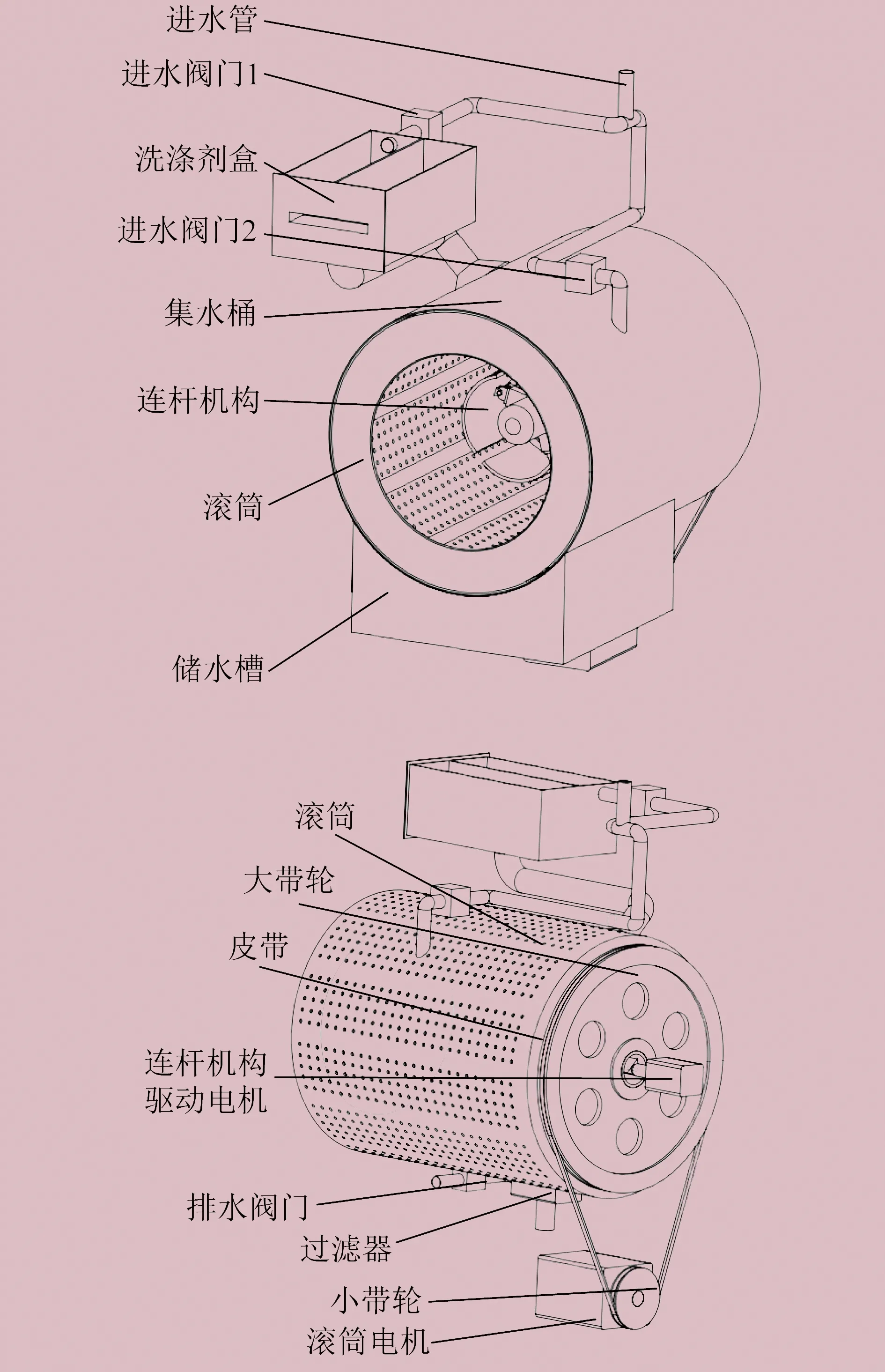
圖1 基本系統(tǒng)
連桿機構(gòu)如圖2所示。由圖2可以看出,清洗系統(tǒng)的連桿機構(gòu)由曲柄滑塊機構(gòu)演化而來,由連桿、伸縮桿、二級伸縮桿、心軸組合而成,其中伸縮桿起到滑塊的作用,心軸相當于曲柄。為了形成伸縮桿的功能,在伸縮桿的一端增設(shè)二級伸縮桿。二級伸縮桿安裝在心軸套筒上的二級伸縮桿槽內(nèi),形成移動副。心軸處于心軸套筒內(nèi),其前端安裝在心軸套筒的圓孔中,末端經(jīng)聯(lián)軸器與連桿驅(qū)動電機相連。心軸上的桿通過止動槽伸出心軸套筒與連桿相連。
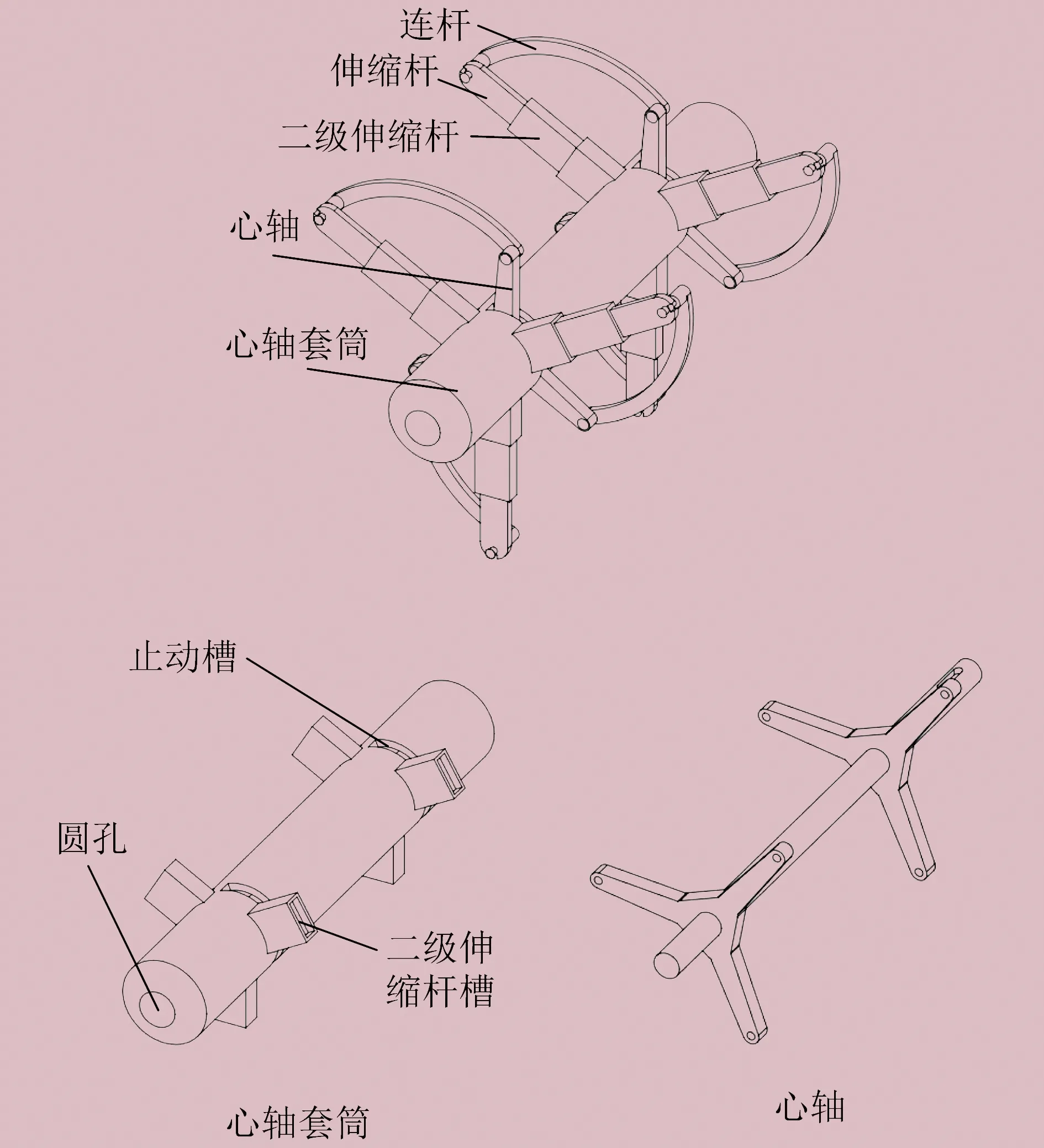
圖2 連桿機構(gòu)
連桿機構(gòu)打開和關(guān)閉狀態(tài)如圖3所示。由圖3可以看出,清洗板安裝于伸縮桿的外側(cè)。如需仿揉搓清洗,連桿機構(gòu)驅(qū)動電機帶動心軸打開伸縮板,在心軸套筒內(nèi)轉(zhuǎn)動直至觸碰到止動槽邊,此時連桿驅(qū)動電機繼續(xù)帶動心軸旋轉(zhuǎn),心軸會帶動心軸套筒在滾筒內(nèi)一起轉(zhuǎn)動,此時滾筒不轉(zhuǎn),處于滾筒與清洗板中間的被清洗物被揉搓清洗。清洗板上存在一系列圓柱形凸起,以提高清洗效果。
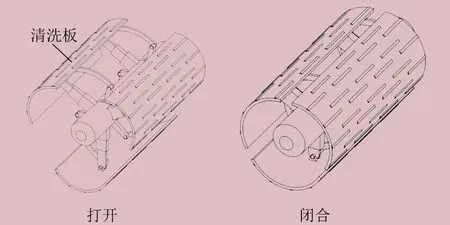
圖3 連桿機構(gòu)狀態(tài)
如需仿捶打清洗,連桿機構(gòu)驅(qū)動電機有節(jié)奏地驅(qū)動心軸在心軸套筒止動槽內(nèi)擺動,此時連桿機構(gòu)有節(jié)奏地打開、閉合,起到捶打清洗效果。
3 連桿機構(gòu)有限元驗證
使用有限元法驗證連桿機構(gòu)的結(jié)構(gòu)可靠性。將連桿機構(gòu)進行簡化,驗證在仿揉搓清洗時受橫向剪切應(yīng)力時的變形和結(jié)構(gòu)應(yīng)力分布情況。
對連桿機構(gòu)進行仿真設(shè)置,材料為鋼材,密度為7 850 kg/m3,彈性模量為200 GPa,泊松比為0.3。采用ANSYS軟件,運用Solid164單元進行網(wǎng)格劃分。網(wǎng)格劃分、載荷及邊界條件設(shè)定之后,有限元模型如圖4所示。
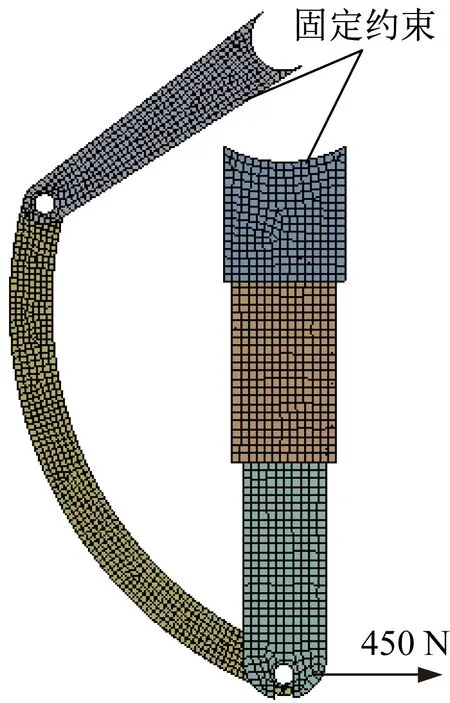
圖4 連桿機構(gòu)有限元模型
在伸縮桿端部鉸鏈上施加橫向剪切力,為保守起見,將剪切應(yīng)力設(shè)置為450 N。根據(jù)連桿機構(gòu)此時工況,固定約束連桿的側(cè)邊和心軸套筒二級伸縮桿槽底部。求解連桿機構(gòu)有限元模型,結(jié)果如圖5所示。
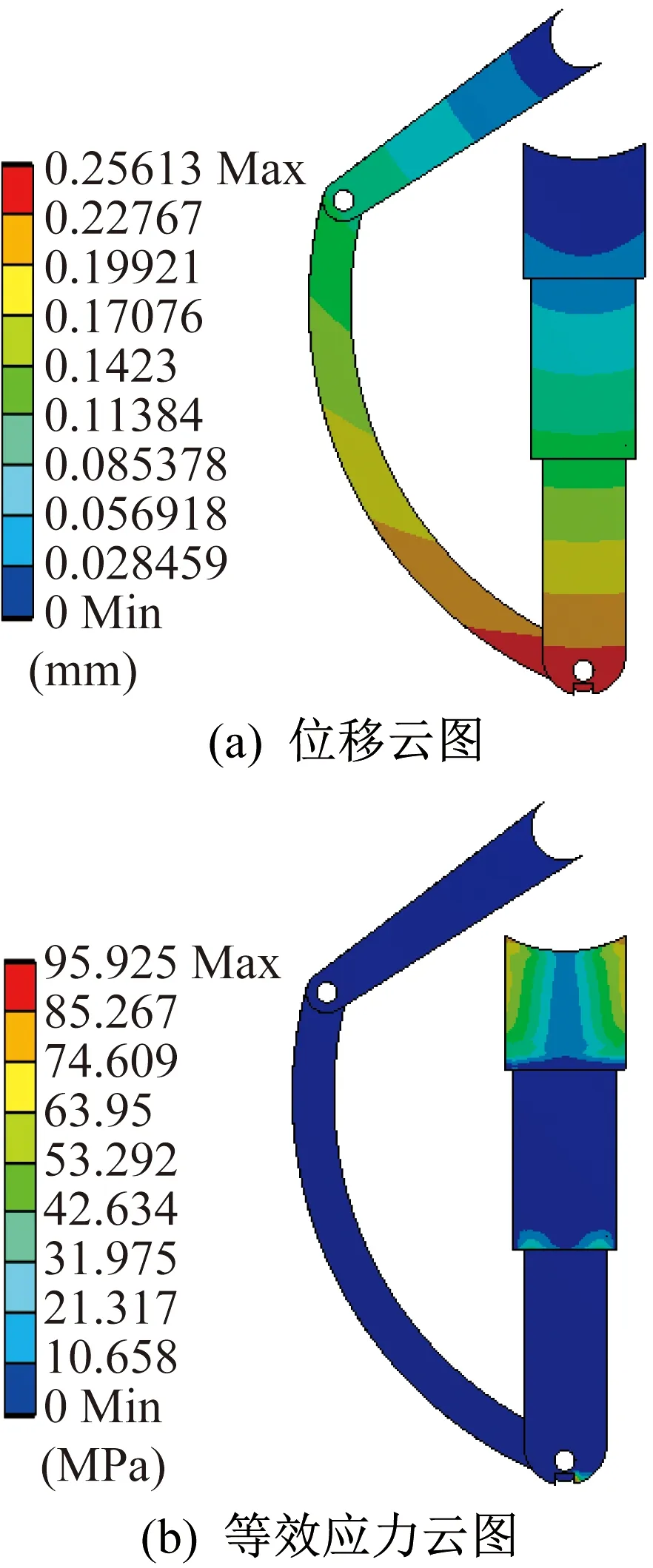
圖5 連桿機構(gòu)求解結(jié)果
從圖5中可以看出,連桿機構(gòu)的最大位移產(chǎn)生在伸縮桿的鉸鏈處,最大位移值為0.26 mm,最大等效應(yīng)力產(chǎn)生在心軸套筒二級伸縮桿槽根部,最大等效應(yīng)力值為95.925 MPa,遠小于鋼材的屈服應(yīng)力,因此可以認為連桿機構(gòu)的結(jié)構(gòu)安全有效。
4 智能控制系統(tǒng)
智能控制系統(tǒng)結(jié)構(gòu)如圖6所示。
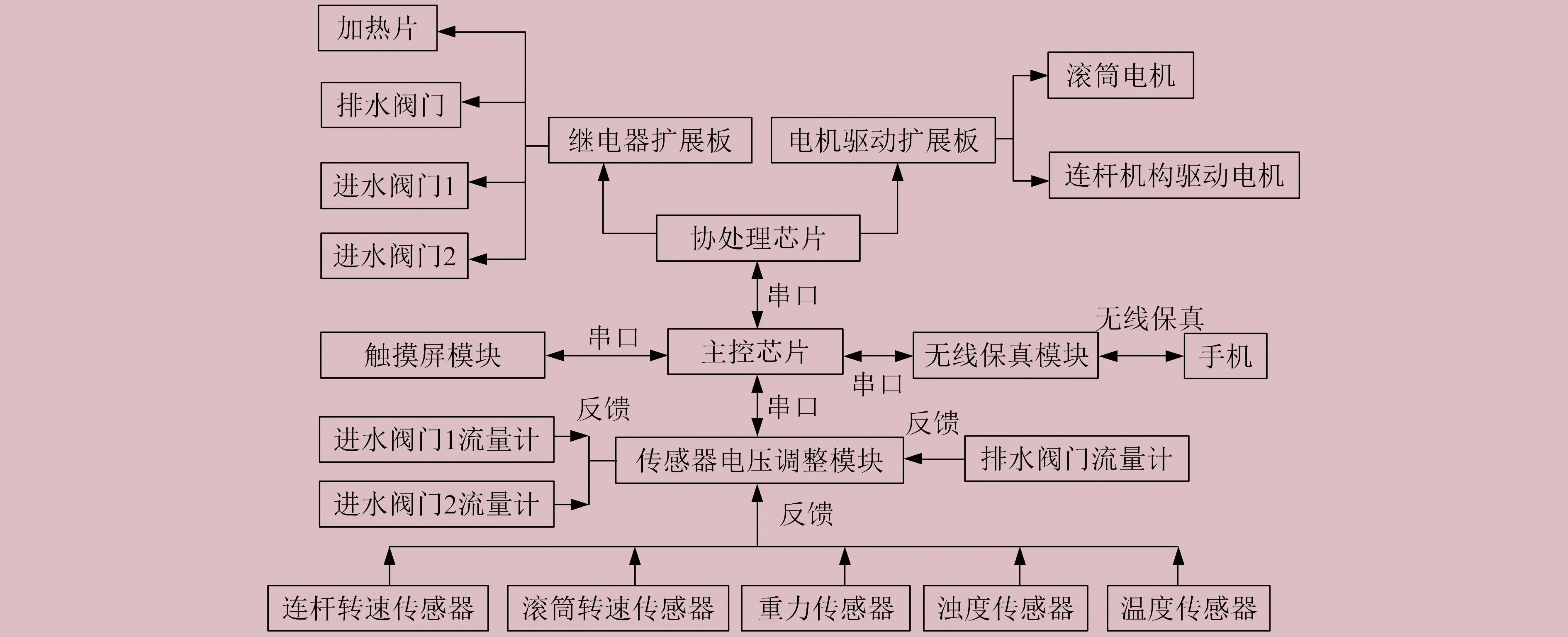
圖6 智能控制系統(tǒng)結(jié)構(gòu)
控制部分主要由主控芯片和協(xié)處理芯片完成。其中,主控芯片能根據(jù)用戶設(shè)定的清洗要求以及傳感器采集的實時數(shù)據(jù),智能完成對各部分的直接或間接控制,以實現(xiàn)不同被清洗物的最佳清洗。根據(jù)主控芯片傳輸?shù)臄?shù)據(jù),協(xié)處理芯片能夠按照程序完成閥門開合、電機啟停、轉(zhuǎn)速調(diào)整、加熱烘干等相關(guān)部件或功能的控制與實現(xiàn)。主控芯片與協(xié)處理芯片之間通過串口完成通信。進水閥門1流量計、進水閥門2流量計、排水閥門流量計分別設(shè)置于進水閥門1、進水閥門2和排水閥門內(nèi),以檢測流量。濁度傳感器位于儲水槽內(nèi),可檢測排水污濁度以判斷洗凈程度。
重力傳感器、溫度傳感器設(shè)置于滾筒內(nèi),用于檢測被清洗物質(zhì)量和清洗水溫。加熱片可加熱清洗水溫或烘干被清洗物。
觸摸屏模塊和手機端為人機交互操作平臺,用戶可以設(shè)置清洗模式、清洗時間、水溫、烘干等功能或選項的設(shè)定,其觸目屏模塊通過串口與主控芯片通信,手機端則通過無線保真通信。
連桿轉(zhuǎn)速傳感器、滾筒轉(zhuǎn)速傳感器、重力傳感器、濁度傳感器、溫度傳感器、進水閥門1流量計、進水閥門2流量計、排水閥門流量計將采集到的信號反饋至傳感器電壓調(diào)整模塊,將電壓信號放大至主控芯片的工作電壓范圍內(nèi)。
協(xié)處理芯片經(jīng)繼電器拓展板和電機驅(qū)動拓展板兩條控制路徑,分別實現(xiàn)控制加熱片、排水閥門、進水閥門1、進水閥門2、滾筒電機、連桿驅(qū)動電機。
5 結(jié)束語
為解決用戶對清洗系統(tǒng)清潔效果好、被清洗物損傷小的期望,筆者參照手洗清潔方式,設(shè)計了一種仿揉搓和捶打的清洗系統(tǒng)。在后續(xù)的工作中,可以從清洗系統(tǒng)的改進角度出發(fā)開展研究,例如,可以在清洗板外包一層柔性清洗材料,以防止被清洗物與連桿機構(gòu)的纏繞。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
流程工業(yè)(2022年3期)2022-06-23 09:41:08
中國石油石化(2021年8期)2021-07-20 07:36:12
煤氣與熱力(2021年3期)2021-06-09 06:16:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
智富時代(2018年5期)2018-07-18 17:52:04
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45