合川某地區組合靜校正應用研究
2022-02-09 08:09:06何玉前
西部探礦工程 2022年12期
何玉前,吳 華
(大慶油田有限責任公司勘探開發研究院,黑龍江 大慶 163712)
靜校正是消除因地表高程和地下低降速帶變化對反射波旅行時的影響,以實現共反射點同向疊加的一項基礎工作。其實質就是消除近地表結構的非均質性對有效信號記錄時間的影響。在工業生產中常用的靜校正主要有折射靜校正、微測井模型靜校正、層析模型靜校正[1-3]。折射靜校正基于簡單的水平層狀介質模型假設,要求表層速度橫向變化小,地表較平緩,存在較穩定的折射層。微測井模型靜校正,是通過地表調查、時深曲線、山體速度調查、小折射以及微測井等常規地表調查手段,得到近地表速度信息,內插出低速帶整個物理空間每個觀測點速度,然后根據這個速度,結合近地表厚度信息來估算靜校正量的一種方法,這類校正量即野外提供的野外靜校正量。層析模型靜校正是利用彎曲射線模型進行彎曲射線追蹤,通過預測初至旅行時,計算出初至旅行時與實際初至旅行時之間的剩余旅行時,并通過迭代使其最小,以便反演出近地表速度,然后利用初至層析成像得到近地表速度場進行靜校正。尹奇峰等研究了不同水平層狀模型條件下正演[4],分析了復雜地區地表一致性靜校正誤差存在的原因及這種原因跟基準面、炮檢距、低速帶和基巖速度、低速帶厚度、反射面深度等之間的關系得出:地表一致性靜校正方法求得的靜校正量與實際的靜校正量有一定的誤差,從而影響到反射波成像質量。唐進通過模型正演分析,和實際資料應用處理認為[5]:即使在水平層狀介質下理論靜校正量和地表一致性靜校正量依然存在差異。認為常規處理中,常用后期的速度分析和剩余靜校正修正這種誤差,但是在一些地表條件復雜的地區,采用非地表一致性靜校正方法才能夠更好的成像。層析靜校正沒有地表一致性假設條件的限制[6],不受地表起伏和近地表低降速帶橫向變化的限制,通過不斷修改模型并計算初至波旅行時直到正演出的理論初至時間與實際初至時間的差達到一定精度為止;所以經過反復迭代最終反演出的近地表模型與實際情況能夠吻合較好;復雜地表、低降速帶速度及厚度變化引起的靜校正得到較好的消除,在理論上比較完美,可以解決復雜近地表的靜校正問題,并且具有較高的靈活性。但是,該技術依賴于所給定的初始模型,對初至拾取質量要求較高,同時計算結果存在多解性和穩定性問題,在每次迭代時對速度模型進行平滑,還帶來短波場靜校正問題[3]。
實際生產要想解決地表復雜地區的靜校正,改善成像,有必要開展多手段互相彌補的靜校正解決方案。本文研究根據合川某地區實際資料的情況,研究開展三步靜校正解決山地靜校正問題,即層析模型靜校正,解決野外靜校正;地表一致性剩余靜校正解決部分高頻抖動;CMP道集時差校正實現最終道集相位一致性校正。實際應用結果與最終成果表明此方案比傳統地表一致性的兩步解決方案更優。
1 合川某工區地表地質情況
工區屬四川盆地低丘陵山地地貌(圖1),最低海拔180m,最高海拔450m,最大相對海拔高差270m。工區地表主要出露侏羅系地層,嘉陵江、渠江沿岸分布少量第四系河灘礫石,東南角附加排列區域內出露少量三疊系地層。激發點邊界內主要為侏羅系沙溪廟組上段砂泥巖互層。工區表層結構一般分為兩層或三層結構,低降速層厚度整體比較薄,在1~7m 之間,高速層速度均達到在2000m/s以上。
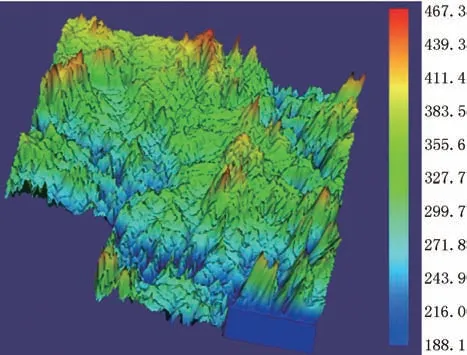
圖1 地表高程
該區面臨的情況不滿足地表一致性的假設:首先低速帶速度較高,地震波在此地表層傳播將不再是垂直出入射,而是傾斜出入射;同一個檢波點接收到的不同反射層的地震波在低速層的路徑不可能相同;因此,即使同一反射層的反射波也會因為炮檢距的不同而具有不同的校正量;其次山地基巖出露是更加不滿足地表一致性假設,檢波器接收到初至波可能是反射波,也可能是折射波;再者地形起伏造成炮檢點之間的高差雖然不大,但是相對變化快,而且變化節奏頻繁,都會使得靜校正后的地震波場與實際波場存在很大差異。地表一致性的靜校正在該區作用有限,并且單一校正方法,無法滿足本地區的校正需求。
2 組合靜校正處理
通過以上工區地表地質情況的討論,可以明確,因假設條件的嚴重不滿足,地表一致性靜校正不能很好地解決本區的靜校正問題,單一的靜校正方法也不能徹底解決本區的靜校正問題,根據實際需求設計層析反演靜校正+地表一致性剩余靜校正+CMP 道集時差校正解決本區的靜校正問題
2.1 層析模型靜校正
層析靜校正方法通過將初始模型網格化,建立各網格內介質速度與初置旅行時的方程并用迭代法求解方程獲得較精準的模型。初至時間數量為M,網格數量為N,設第i個初至時間為ti,地下第i個網格慢度為si,第j條射線在第i個網格中的路徑長度為dij,i∈[1,2,…,M],j∈[1,2,…,N]。則初始旅行時方程為:

簡寫成向量式:

式中:T——初至時間向量即實際拾取量;
D——射線路徑向量;
S——慢度向量待求解量。
問題簡化為解方程:

求解后得到關于地下介質的網格化速度模型。據此模型,確定基準面即可計算出炮檢點靜校正量。
2.2 超級道地表一致性剩余靜校正
超級道地表一致性剩余靜校正處理,首先利用相鄰道疊加或外部輸入道作為模型道,在給定的時窗范圍內依次在給定的CMP范圍里進行傾角掃描處理,在輸入的動校后CMP 道集上根據掃描得到的傾角形成超級道,根據超級道數據計算出共炮點(檢波點)超級道,以及相應炮點(檢波點)超級模型道;通過共炮點(檢波點)超級道與相應炮點(檢波點)超級模型道互相關,計算該炮點(或檢波點)靜校正量。最后根據統計原理,采用迭代方法計算炮點、檢波點的剩余靜校正量。經過多次速度修正迭代,最終完成超級道地表一致性剩余靜校正處理。它主要采用的公式是:

式中:T——經過動校正后的總反射時間;
i——炮點位置;
j——檢波點位置;
k——CMP道集點位置;
G——構造項;
S——炮點靜校正量;
R——檢波點靜校正量;
M——剩余動校正時差系數;
X——炮檢距;
N——噪聲。
2.3 CMP道集時差校正
一般處理過程中完成靜校正及地表一致性剩余靜校正后,長波場、短波場的校正問題都會得到較好的解決,但是常規兩步方案的動校后的CMP 道集,于本工區的實際情況卻依然存在高頻校正問題,圖2(左)中,其主要原因:首先在層析模型靜校正的過程中,出于計算穩定的需求,在對模型及最后的高速面的定義過程中的平滑作用,帶來短波場靜校正問題;其次地表一致性剩余靜校正中動校CMP道集在單個CMP道集內也是速度的平均作用,意味著此過程單個道集內也是平滑的;這些平滑的實際存在,校正不了非地表一致性的剩余問題。因此在此基礎上,開展在CMP道集內時差校正。利用經過動校正的CMP 道集內的各道與輸入的模型道在定義的時窗內做互相關處理,獲得相對時移,實現對原始CMP 道集應用非地表一致性剩余靜校正處理。為了更好地避免實際運用過程中“串相位”,采取每個動校后的CMP 道集疊加結果進行背景隨機噪音衰減后的道作為該CMP內對應的模型道;定義的時窗不宜過小,應包含中淺層且包含穩定連續的反射界面,穩定且連續反射界面是質控此應用過程的有效條件。

圖2 CMP道集時差校正前后CMP道集對比(左:校正前;右:校正后)
3 處理結果及成果對比
圖2CMP 道集時差校正前后對比,校正后的CMP道集(動校后)改善明顯,剩余不規則的抖動得到很好的校正,同時間深度的反射連續性得到加強,相同反射層的相位差得到很好的校正,一致性加強,道集背景噪音壓制進一步改善。圖3是不同校正方案最終時間偏移CRP 道集對比,地表一致性校正的結果存在嚴重的靜校不靜,局部反射雜亂;本文解決方案的結果,反射特征清晰,相位橫向一致性大幅提高,可靠度好,更加有利于道集優化及支撐疊前反演等工作。

圖3 時間偏移CRP對比
新老成果剖面對比見圖4。本輪處理的主要目的層是中淺層主要是須家河地層,尤其須二段,兼顧沙溪廟。老成果(圖4上)淺層成像不理想,背景干擾影響大,須家河的成像不穩定,有效分辨嚴重不足,細分層解釋困難。新成果(圖4下)較老成果有如下改善:首先剖面背景噪音控制新成果更好;其次剖面成像新成果更穩定,須家河細分層橫向穩定性更高;再者淺層成像更加清楚,沙溪廟地層古河道砂體等成像在剖面上更加明晰,邊界更加清楚。

圖4 成果剖面對比(上:老成果;下:新成果)
4 結論
(1)復雜地區靜校正解決應該根據實際需求,進行針對性選擇,以滿足處理需要。
(2)本工區處理應用層析靜校正+地表一致性剩余靜校正+CMP道集時差校正三步靜校正組合方案取得很好的效果,最終成果改善明顯。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學問題(2021年4期)2021-11-05 07:02:34
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中國公共安全(2017年11期)2017-02-06 05:28:08
光學精密工程(2016年6期)2016-11-07 09:07:19
燕山大學學報(2015年4期)2015-12-25 02:19:49
