
煤礦井下UWB 讀卡器天線標定方法研究
2022-02-10 03:21:20溫賢培
煤礦安全 2022年12期
溫賢培
(中煤科工集團重慶研究院有限公司,重慶 400039)
煤礦安全“六大系統”中高精度的人員定位系統是工作人員安全生產的有力保障[1-3]。相對于地面普遍采用的GPS 定位技術,煤礦井下采用藍牙、Zigbee、RFID、UWB 等室內定位技術實現人員定位,傳統2.4 GHz 定位技術幾乎都采用RSSI 判斷距離的方法實現定位,煤礦井下空間狹小、路況復雜、粉塵量大,導致RSSI 信號極不穩定,定位精度通常只能達到米級,已不適應定位精度需求越來越高的煤礦井下人員定位系統[4-6]。
UWB 技術相對于傳統無線通信技術,它采用超寬帶方式進行信息傳輸,單通道帶寬可達500 MHz,頻譜覆蓋3.5 GHz 到6 GHz 范圍,由于采用瞬時尖峰脈沖發射數據,不需要使用像傳統無線通信體制中的載波,其具有系統設計復雜度低,發射信號穿透力強,信息安全性高,定位精度高等優點,尤其適用于室內等密集多徑場所的高速無線接入,且可采用類GPS 定位方式實現高并發量需求,現已成為室內定位首選定位技術[7-8]。煤礦井下采用UWB 讀卡器實現井下人員精度定位,UWB 讀卡器根據安裝環境選用不同長度的饋線和不同型號的天線,為確保定位精度滿足標準需求,現場安裝完畢后需進行天線延時參數標定,傳統標定方法采用全站儀進行標定距離測量,并手動迭代校準天線延時參數以滿足現場需求,在煤礦井下操作難度較大且極其不方便,需要一種方便快捷的標定方法滿足現場需求。
1 UWB 測距原理
UWB 信號在本質上是占空比很短的射頻脈沖信號,并在脈沖信號上進行無載波擴譜,用戶要傳輸的信息進行一定方式調制后放大到所需功率,再通過變壓器和電容耦合到天線發射出去,信號發射瞬間功率較大但功率譜密度卻很小。當天線接收到UWB 信號時同樣經過變壓器和電容耦合到信息接收端,對接收信息進行濾波放大再經過一系列復雜算法進行信息分離,分離出前導碼、序列號、數據、校驗碼以及干擾等信息,并對信息進行錯誤校驗,最后輸出數據和數據報告。
UWB 實現精確定位可以采用時間差定位法(TDOA)、到達時間定位法(TOA)、相位差定位法(PDOA)以及飛行時間定位法(TOF),但不管采用哪種定位法都會受到天線延時參數的影響。UWB 測距流程如圖1。

圖1 UWB 測距流程Fig.1 UWB Ranging process
Tag 發出Poll 幀經過天線發送延時Ttx2時間段后發射到空氣中,Poll 幀發送時間戳計為Poll_Tx,Anchor 接收到Poll 幀時間戳計為Poll_Rx,經過天線接收延時Trx1時間段后接收數據,Anchor 處理數據所需時間為Tt1’,然后發出Resp 幀數據,經過天線發送延時Ttx1時間段后發送到空氣中,Resp 數據發送時間戳為Resp_Tx,Tag 采用同樣的方式處理,根據式(1)可求出測距距離d:

式中:d 為測距距離;Tta為Poll_Tx 和Resp_Rx時間差;Ttb為Poll_Rx 和Resp_Tx 時間差;Ttc為Resp_Rx和Final_Tx 時間差;Ttd為Resp_Tx 和Final_Rx 時間差;c 為光速。
為了確保測距精度滿足使用需求,公式中的變量都必須精準可靠,以Ttb時間測量為例,UWB 芯片只能夠直接測量出Tt1’的值,然后加上Trx1和Ttx1的值得出Ttb的值,Trx1、Ttx1分別為Anchor 天線的接收、發送延時,接收、發送延時參數偏差都會影響測距精度,因此UWB 讀卡器天線延時參數標定準確與否將直接影響距離測量精度。
2 系統設計
2.1 方案設計
UWB 讀卡器天線延時參數標定前必須準確測量出待標定的距離值,通常可采用激光測距儀或全站儀進行精確測量,但普通的激光測距儀量程較短不能滿足現場使用需求,全站儀測距精度高達毫米級,測量范圍也可上千米,但是全站儀標定流程太復雜也太費時,不能滿足復雜環境下快速自動標定UWB 天線的需求。UWB 測距技術本身就滿足厘米級的距離測量,采用特殊匹配的UWB 設備進行標定距離測量,并通過濾波處理作為標定距離供UWB讀卡器自動標定使用,UWB 讀卡器根據標定距離自動修改UWB 天線延時參數,直到UWB 讀卡器測距值與標定值偏差在規定范圍內則認為標定完成。
將UWB 標識卡放置于UWB 讀卡器前一段距離并固定不動,放置距離最好大于100 m 以上,減少其它因數造成的測距偏差。UWB 測距通常會有10 cm 左右的波動偏差,系統將100 次測距數據進行順序排序,取中間40 個數據進行均值濾波算出標定值Dt,UWB 手持讀卡器將標定距離Dt通過UWB 網絡傳輸給UWB 讀卡器并啟動自動標定流程。
UWB 讀卡器接收到標定距離Dt后啟動自動標定程序,自動標定程序超時時間為8 s,UWB 讀卡器測距值與Dt相差10 cm 以內且則認為標定成功,否則標定失敗。標定流程圖如圖2。

圖2 標定流程圖Fig.2 Calibration flow chart
2.2 通信協議
UWB 手持讀卡器入網到UWB 讀卡器網絡,UWB 讀卡器分配時序以供與UWB 手持讀卡器通訊。通信協議由UWB 手持讀卡器發起,UWB 讀卡器接收信息后回傳信息完成數據交互。
1)UWB 手持讀卡器協議。請求協議附帶工作模式控制字,通知UWB 讀卡器切換為何種工作模式,模式分為測距模式和標定模式,同時傳輸供UWB天線標定所使用的距離標定值。UWB 手持讀卡器通信協議見表1。
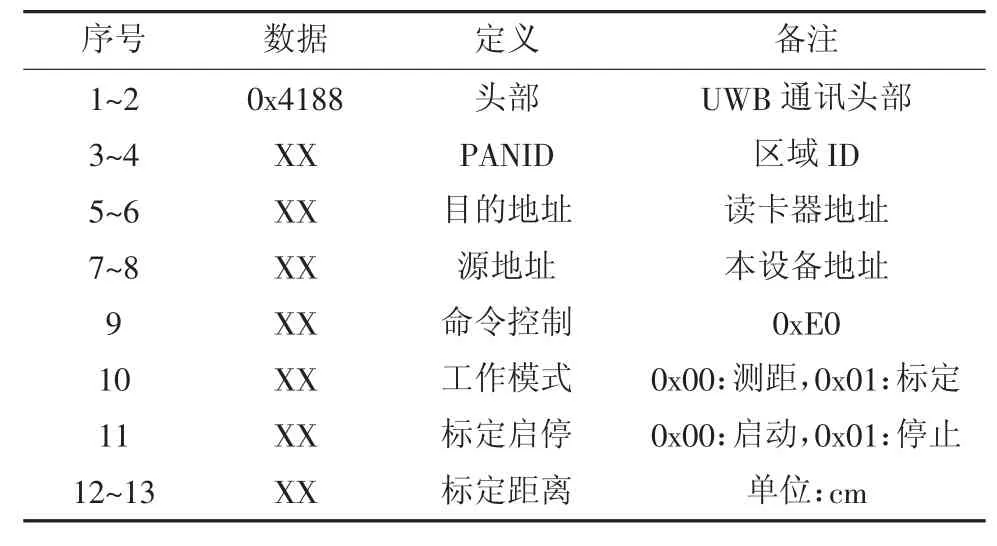
表1 UWB 手持讀卡器通信協議Table 1 Communication protocol of UWB hand-held card reader
2)UWB 讀卡器協議。讀卡器接收標定命令后進入標定狀態,并停止與標識卡進行正常測距,接收標定啟動命令后進行自動標定,并實時傳回標定狀態。UWB 讀卡器通信協議見表2。

表2 UWB 讀卡器通訊協議Table 2 Communication protocol of UWB card reader
3 自動標定
PID 控制算法具有歷史悠久,性能穩定,反應迅速,適應性強,控制參數相互獨立,良好的閉環控制性能等優點,也是應用最廣的控制算法之一[9-10]。系統中采用了增量式PID 控制算法進行控制,增量式PID 控制算法相對于位置式PID 控制算法不需要做累加,而是在當前控制量的基礎上增加控制量達到調節參數的目的。計算出現故障時可丟掉本次增量,減小故障影響,由于執行器本身具有記憶功能,可保持上次操作。UWB 天線標定系統延時小、慣性小,能迅速反饋天線參數變化改變的測距變化,可取消增量式PID 算法里面的微分項,采用PI 控制已完全能適應需求。計算公式如式(2):
u(k)=u(k-1)+KP[e(k)-e(k-1)]+KIe(k)(2)
式中:u(k)為天線標定值;u(k-1)為上次天線標定值;KP為比例參數;KI為積分參數;e(k)為標定值與測量值偏差;e(k-1)為上次標定值與測量值之間的偏差。
采用PID 控制后UWB 讀卡器將會自動判斷標定距離與測量距離的偏差值進行實時參數修正,以達到快速自動標定的需求,自動標定成功除了判斷標定值與測量值偏差在10 cm 以內,還需對測量值進行均方差處理引入測距數據波動判斷,只有同時滿足測距值波動小的情況下才能標定成功。
4 測試驗證
山西鑫巖煤礦搭建環境測試,針對多臺UWB讀卡器在100 m 處進行標定并檢測不同距離測距精度,根據數據分析測試效果,測試數據見表3。
由表3 可得,UWB 讀卡器采用自動標定方法標定后的測距值總體偏差在20 cm 左右,滿足標準規定30 cm 以內的精度需求;現場環境較為惡劣,未能測試在200、300、400 m 處標定后進行測距的偏差值,后續測試中將驗證不同環境不同距離自動標定天線延時參數對測距精度的影響。
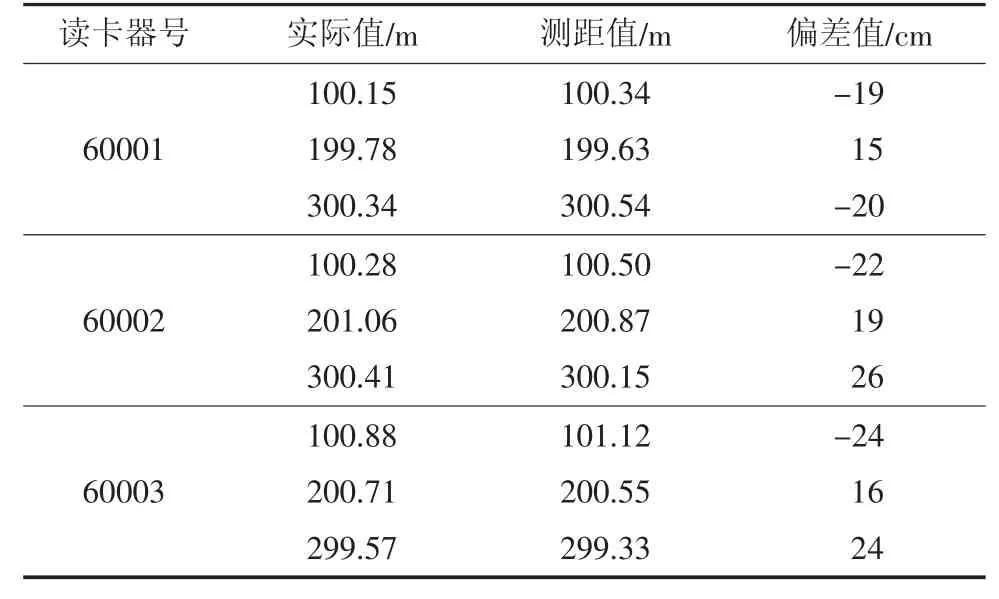
表3 現場測試數據Table 3 Field test data
5 結 語
從UWB 測距原理分析出發,研究UWB 讀卡器現場快速標定方法,采用手持UWB 讀卡器協助UWB 讀卡器快速自動標定,標定后測距精度滿足標準需求。但標定時標識卡與讀卡器必須處于可視范圍內,否則可能會出現標定失敗或標定后測距精度不滿足標準規定30 cm 以內的精度需求,后續可針對標定數據研究更合適的濾波算法,為UWB 讀卡器提供更準確的標定數據提高標定精度。
