大型鋼結構巡檢爬壁機器人永磁輪優化設計
2022-02-11 11:46:40劉俊鋒洪曉瑋聶宇成
制造業自動化 2022年1期
劉俊鋒,洪曉瑋,陳 勇,聶宇成
(南京林業大學 機械電子工程學院,南京 210037)
0 引言
大型鋼結構長期處在惡劣自然條件下,表面的保護漆會老化、剝落,從而導致其腐蝕生銹。其次,像港口起重機等機械設備作業過程始終處于交變載荷之中,容易發生疲勞失效和斷裂等問題。目前主要依靠人工對大型鋼結構進行缺陷檢測,不僅勞動強度大,而且危險系數極高。因此,國內外開展了大量研究[1~4],希望爬壁機器人能夠代替人工對大型鋼結構進行巡檢作業。
爬壁機器人按照吸附方式可分為負壓吸附、電磁吸附和永磁吸附;按照移動方式可分為足式、履帶式和輪式。永磁輪式爬壁機器人能夠滿足大型鋼結構巡檢可靠吸附和靈活運動的需要,但產生較大的吸附力會要求增大永磁輪質量,從而增加了驅動系統的負載。所以,對永磁輪進行優化設計,提高單位質量吸附力即吸附效率,是爬壁機器人研制的重點之一。潘泊松等人[5]通過多島遺傳算法對基于Halbach陣列永磁輪的結構參數進行了優化,提高了磁能利用率。Howlader等人[6]重點分析永磁吸附裝置中軛鐵厚度和個數對吸附力的影響,確定了最佳結構方案。袁碩等人[7]對Halbach陣列中永磁體采用水平和垂直結合充磁來減少結構漏磁。陳彥臻等人[8]改進傳統永磁輪磁路,提高了吸附力。
上述研究大多停留在模型仿真階段,并且對永磁輪吸附在曲面時缺少相關分析。本文針對大型鋼結構巡檢需要,研制一種適應在曲面爬行的永磁輪式爬壁機器人,利用COMSOL軟件優化永磁輪結構參數,并證明機器人具有在大型曲面鋼結構上可靠吸附的能力。
1 爬壁機器人整體結構設計
本文設計的爬壁機器人三維結構如圖1所示。機器人由前段和后段組成,前后兩段各安裝有一個永磁輪和伺服電機,實現在鋼結構壁面上的吸附和爬行;安裝在前段上的步進電機為機器人轉向提供動力。前后兩段由鉸鏈連接,可以相對偏轉一定角度,使得爬壁機器人能夠在曲面上爬行。
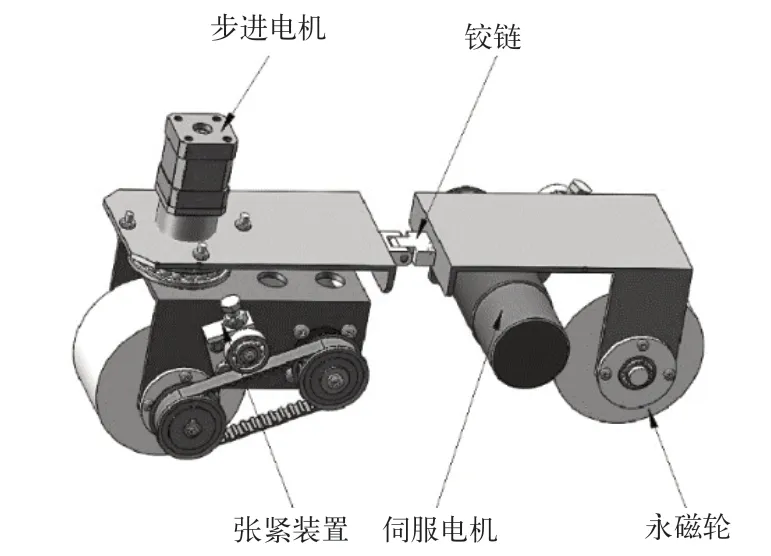
圖1 爬壁機器人三維圖
1.1 永磁輪結構設計
如圖2所示,永磁輪整體是對稱的,由軛鐵、永磁體、隔磁件組成。永磁體選用剩余磁感應強度高,矯頑力大的稀土材料釹鐵硼。兩邊軛鐵選用工業純鐵,其飽和磁感應強度高,加工性能好,它可以引導磁通集中在永磁輪與鋼結構壁面接觸區域。隔磁件采用銅隔開相鄰磁路的磁感線分布,提高磁場利用率。為防止永磁體與鋼結構壁面間產生碰撞、磨損,設計軛鐵外徑比永磁體外徑大2mm~3mm,起到保護作用。
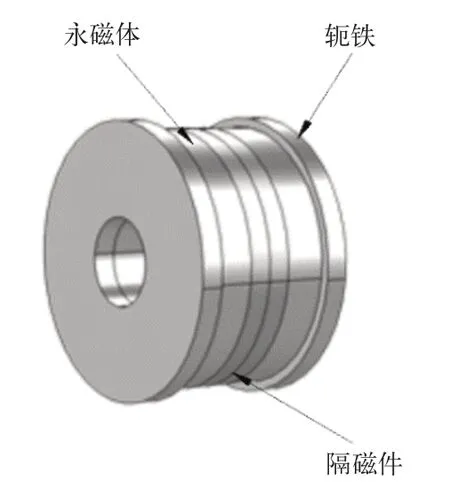
圖2 永磁輪三維圖
2 爬壁機器人可靠吸附條件研究
爬壁機器人主要有三種失穩形式:沿工作壁面滑移、縱向傾覆和橫向傾覆[9]。許多大型鋼結構壁面與豎直面存在夾角β,取值范圍為[-90°,90°],如圖3所示。當β∈[0,90°]時機器人更有可能發生失穩。為求得可靠吸附時的吸附力,本文僅對吸附在[0,90°]壁面上的機器人進行力學分析。

圖3 機器人縱向吸附力學分析圖
2.1 沿工作壁面滑移
圖3為爬壁機器人在壁面上縱向吸附的力學分析,若避免發生滑移,則受力條件為:

式中:Fa為永磁輪吸附力,G為機器人重力,N1為壁面對永磁輪1的支持力,N2為壁面對永磁輪2的支持力,Ff1為永磁輪1受到的靜摩擦力,Ff2為永磁輪2受到的靜摩擦力,μ為永磁輪與壁面間靜摩擦系數。
且Ff1≤μN1,Ff2≤μN2可得:

2.2 縱向傾覆
由圖3可得機器人在壁面上不縱向傾覆(不繞永磁輪1的吸附點翻轉)的條件為:

式中:l1為機器人重心與永磁輪1中心在Y方向上的距離,l2為兩個永磁輪中心在Y方向上的距離,h為機器人重心到壁面的距離。
且N2≥0,可得:

2.3 橫向傾覆
圖4為爬壁機器人橫向吸附的力學分析,則不發生橫向傾覆的條件為:
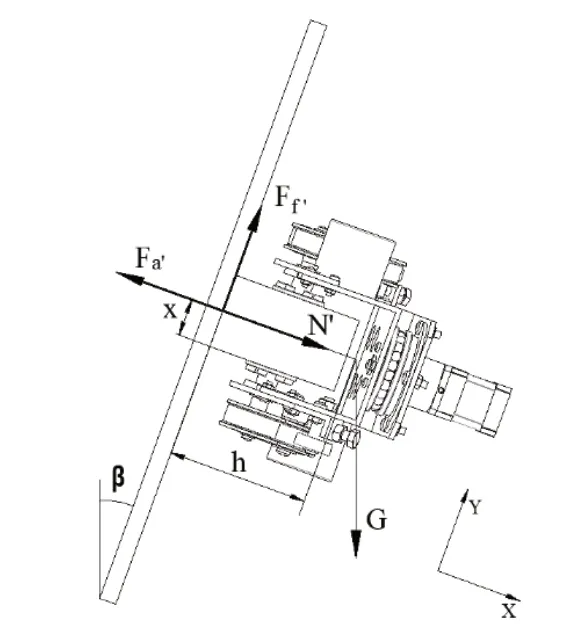
圖4 機器人橫向吸附力學分析圖

式中:Fa'=2Fa為永磁輪的總吸附力,N'=N1+N2為壁面對永磁輪的總支持力,Ff'為壁面對永磁輪的總靜摩擦力,x為機器人重心到永磁輪下邊緣沿Y方向上的距離。
且Ff'≤μN',可得:

2.4 吸附力極值計算
綜上可知,永磁輪吸附力必須滿足:

根據設計參數:G=98N,μ=0.4,l1=140mm,l2=235mm,h=80mm,x=22mm。代入式(9)可得:Fa≥304.65N。
所以,當單個永磁輪提供的吸附力Fa≥304.65N,機器人能在鋼結構壁面上可靠吸附。
3 永磁輪有限元建模仿真及優化設計
3.1 靜態磁場 理論模型的求解
爬壁機器人永磁輪的磁場為靜態磁場,其分布符合Maxwell 電磁理論。為了簡化磁場求解,引入矢量磁位A:

式中:B為磁感應強度。
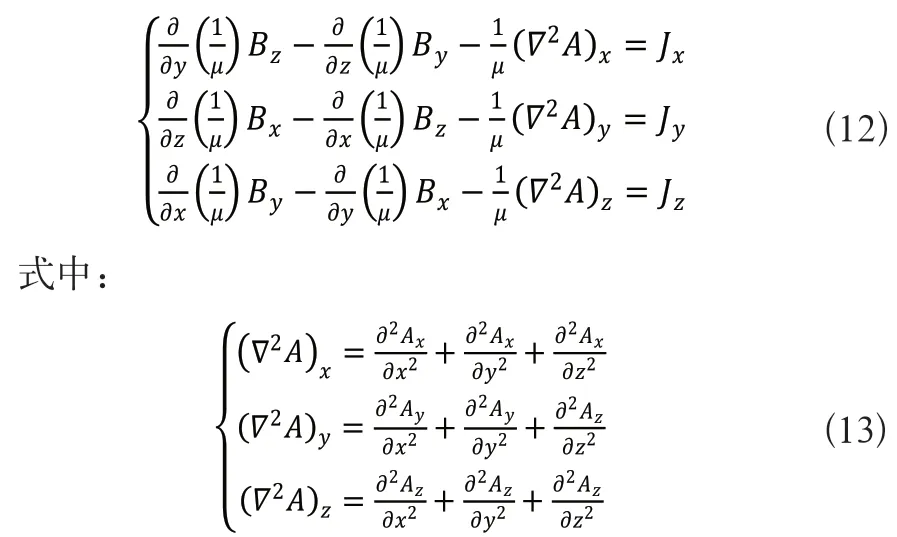
由于永磁體、軛鐵、隔磁件及空氣介質都為各向同性材料[10],根據Maxwell方程組、介質本構關系和庫倫規范,可推導出:

式中:μ為介質磁導率,J為傳導電流密度。
結合式(10),將式(11)在坐標系中展開得:
吸附力也是磁場分析的重要指標,可用Maxwell張力法來計算永磁輪與鋼結構壁面間的吸附力:

式中:S為包圍磁場中介質的閉合面,n為ds外法線方向的單位矢量,B為閉合面上磁感應強度,u為空氣的磁導率。
上述靜磁場模型是進行有限元仿真的根本依據,由式(14)可知,利用COMSOL Multiphysics軟件對吸附力進行求解時,必須將永磁輪模型封閉在空氣中。
3.2 永磁輪的磁場仿真與分析
永磁體材料為N40釹鐵硼,兩個磁環采用軸向充磁,并反向布置。考慮到永磁輪整體尺寸,初始設定永磁輪內徑d=29mm,外徑D=70mm,永磁體寬度t1=10mm,隔磁寬度t2=6mm,軛鐵寬度t3=7mm,總寬度T=46mm,壁面厚度t=10mm,其結構參數示意如圖5所示。由于鋼結構表面有油漆和銹蝕,且永磁輪外包裹尼龍保護套,上述非導磁物質使得永磁輪與壁面不直接接觸,因此取氣隙L=5mm。
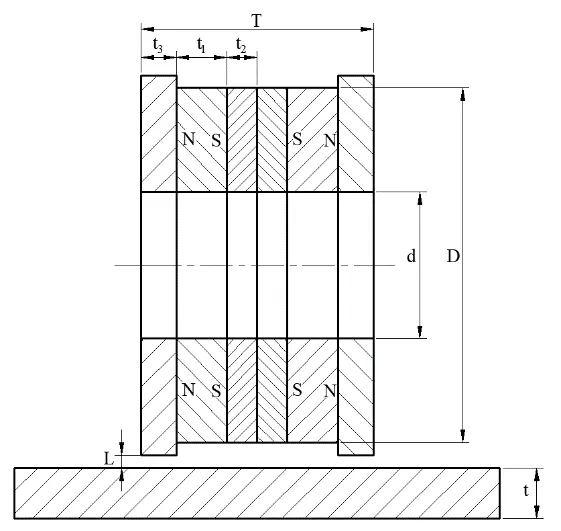
圖5 永磁輪結構參數示意圖
在COMSOL軟件中構建永磁輪的三維有限元模型并進行仿真計算,多切面磁通密度模如圖6所示。
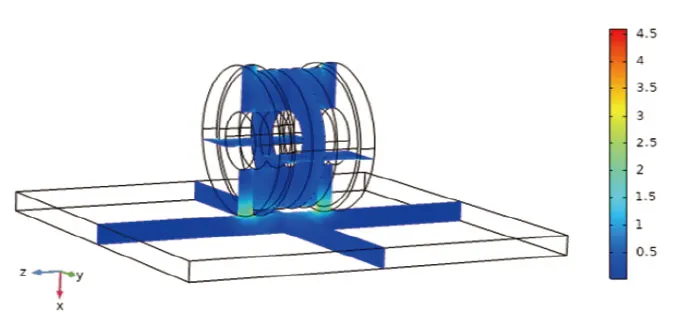
圖6 多切面磁通密度模
從圖6可以看出磁通密度最大處分布在兩側軛鐵與壁面間氣隙處,表明永磁輪吸附在壁面上時能產生較大吸附力。中間隔磁件處磁通密度較小,隔磁件發揮了一定作用。這些都符合磁路設計的原則和實用目的。
在全局計算中求解電磁力的x軸負方向分量,即永磁輪對壁面的吸附力為308.95N,大于304.65N,證明了其結構的合理性。
3.3 永磁輪的結構參數優化
永磁輪優化設計的準則是最大限度提高磁能利用率。因此在機器人可靠吸附的前提下,提出優化目標:使吸附力與永磁輪自身質量的比值盡量大,提高永磁輪的吸附效率:

式中:Fa為吸附力,ma為永磁輪質量;受爬壁機器人總體尺寸和安裝空間限制,永磁輪內徑d=29mm和外徑D=70mm已經確定。
本文通過控制變量的方法,利用COMSOL軟件選擇參數化掃描并計算單變量對永磁輪吸附力和吸附效率的影響,設置參數取值1mm~20mm,等間隔取1mm。
如圖7所示,永磁體寬度增加會使吸附力和吸附效率單調增加。磁路的磁感線主要通過軛鐵,透過氣隙進入壁面。t1增加,氣隙內磁通密度增大且未飽和,所以吸附力上升。吸附力增幅大于永磁輪質量的增幅,可知適當增加永磁體寬度可達到提高吸附效率的目的。綜合考慮,受機器人尺寸約束,t1在滿足可靠吸附的情況下取值為11mm,使永磁輪整體寬度在45mm以內。
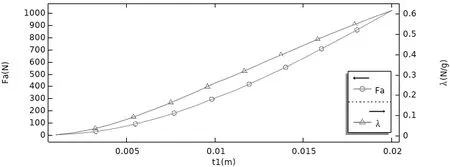
圖7 永磁體寬度對吸附力和吸附效率的影響
如圖8所示,隔磁寬度增加,吸附力也逐漸增加。因為t2增大,磁路中磁阻增大,迫使更多磁通經過軛鐵增大氣隙內磁通密度。t2在1mm~10mm范圍內,吸附效率增加,且6mm之后上升緩慢。但隔磁繼續增寬導致永磁輪質量增幅更大,降低了吸附效率。考慮到永磁輪尺寸,t2取值不變。
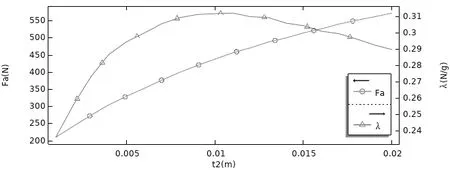
圖8 隔磁寬度對吸附力和吸附效率的影響
如圖9所示,當t3大于5mm時,吸附力增加緩慢后逐漸減小。因為軛鐵寬度增加,磁路中漏磁減少而磁通密度增大,但軛鐵內磁通逐漸飽和,使吸附力增加趨于平穩。t3繼續增大后,構成回路的磁感線減少,導致吸附力下降。在滿足可靠吸附的條件下,t3取值為5mm,此時軛鐵的利用率最高,吸附效率也近似最大。
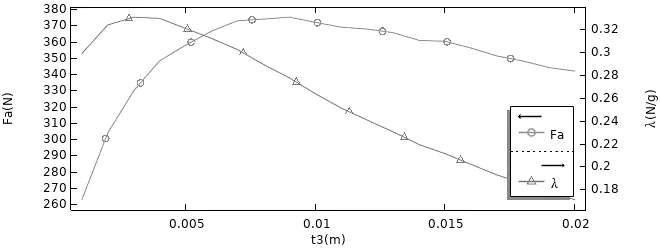
圖9 軛鐵寬度對吸附力和吸附效率的影響
結合上述分析,確定了永磁輪的結構參數。優化前后對比如表1所示,優化后永磁輪整體質量有所減小,吸附力大幅度增加。吸附效率從0.248N/g到0.308N/g,提高了24.2%。不僅增加了爬壁機器人吸附可靠性,也為在曲面鋼結構上作業時需要的吸附力留有余量。
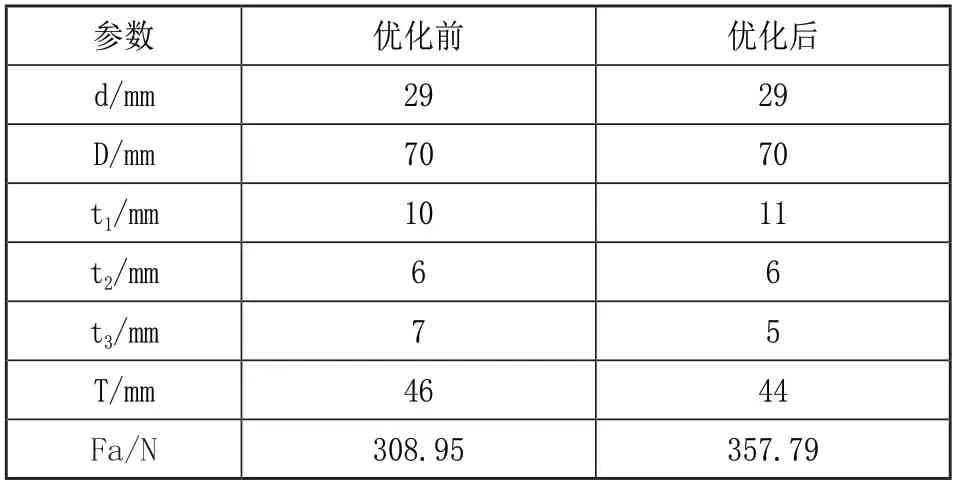
表1 永磁輪優化前后對比
3.4 永磁輪曲面吸附分析
永磁輪吸附在平面鋼結構時與壁面是線接觸,由于曲率的存在,永磁輪吸附在曲面時接觸面更小,對吸附力有更高的要求。當爬壁機器人以不同姿態在曲面鋼結構上爬行時,難以確定極值,但能肯定機器人在球面上的吸附狀態是最嚴峻的。因此利用COMSOL軟件建立優化后永磁輪和球面的三維有限元模型,研究了球面半徑對吸附力的影響。如圖10所示,隨著球面半徑增加即曲率的減小,永磁輪吸附力逐漸增大。當球面半徑為0.87m時,吸附力是306.93N,已達到機器人可靠吸附的條件,即機器人適應在曲率半徑大于0.87m的大型鋼結構上爬行。
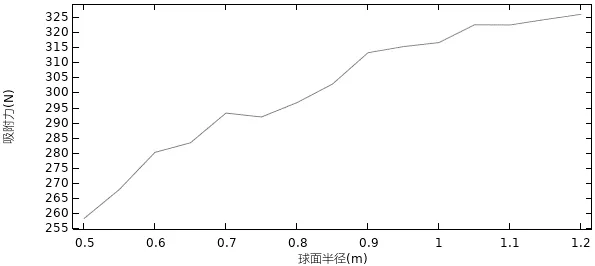
圖10 球面半徑對吸附力的影響
4 機器人樣機實驗
將研制好的爬壁機器人樣機放在豎直鋼板上進行測試,如圖11所示,機器人靜止時能夠穩定吸附在壁面上,行進時能夠以任意姿態在不同角度的壁面上靈活爬行。
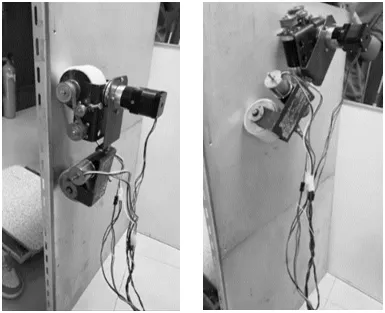
圖11 爬壁機器人樣機
實驗結果表明:爬壁機器人吸附能力符合可靠吸附的要求,永磁輪能為爬壁機器人提供穩定的吸附力,驗證了其優化設計的可行性和正確性。
5 結語
本文研制了一種可在曲面爬行的大型鋼結構巡檢爬壁機器人,重點開展永磁輪的磁場仿真,對其結構參數進行了優化。
1)對爬壁機器人三種失穩形式進行了靜力學分析,得到永磁輪產生的吸附力應大于304.65N,為其優化設計提供理論目標。
2)利用COMSOL軟件對永磁輪進行仿真分析,確定了結構參數。結果顯示:優化后永磁輪吸附力為357.8N,吸附效率提高了24.2%,機器人能在曲率半徑大于0.87m的鋼結構上可靠吸附。
3)進行樣機實驗,驗證了永磁輪能提供穩定可靠的吸附力,且爬壁機器人能夠以任意姿態在不同角度壁面上靈活爬行。
猜你喜歡
建材發展導向(2022年14期)2022-08-19 02:10:10
建材發展導向(2022年14期)2022-08-19 02:08:18
房地產導刊(2022年5期)2022-06-01 06:20:14
山東冶金(2022年1期)2022-04-19 13:40:48
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年9期)2021-07-16 07:10:58
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中國公路(2017年15期)2017-10-16 01:31:54
