基于人工智能的火電機組負荷頻率自抗擾控制系統
2022-02-14 11:17:40趙晉宇趙磊何志明郭健
電子制作 2022年2期
趙晉宇,趙磊,何志明,郭健
(國家電投集團內蒙古白音華煤電有限公司坑口發電分公司,內蒙古錫林郭勒盟西烏珠穆沁旗,026299)
0 引言
我國經濟社會的發展和人們的日常生活離不開火電行業,火電行業是社會發展的動力,火電發電是我國的主要電源。火電發電的燃料以煤為主,一般電力行業會將煤放入鍋爐中進行燃燒,保證燃燒的化學能可以轉化為熱能,通過汽輪機將熱能轉化為機械能,最終通過發電機將機械能轉化為電能,這就是電能產生的主要過程。火電機組負荷頻率是影響電能質量的一個重要因素,火電機組的負荷頻率的變化情況影響電力系統的穩定性,為了保障電力系統能夠正常運行,需要設計一個火電機組負載頻率自抗擾控制系統,降低火電機組負荷頻率的波動幅度。傳統的火電機組負荷頻率自抗擾控制系統構建的模型不穩定,在建模時參數存在一定的偏差,導致控制效果不佳。根據傳統系統存在的問題,設計一個全新的自抗擾控制系統,將人工智能技術運用到火電機組自抗擾控制系統中,能夠準確測量火電系統運行的參數值,可以將各項指標控制在正常范圍值之內。人工智能技術融合了多項高新技術,普遍運用在經濟政治決策和控制系統中,通過計算機的軟硬件模擬某些智能行為,使智能行為滿足人們的需求,研究基于人工智能的火電機組負荷頻率自抗擾控制系統。
1 基于人工智能的火電機組負荷頻率自抗擾控制系統硬件設計
由于基于人工智能的火電機組負荷頻率自抗擾控制系統主要依托計算機實現,系統的硬件主要包括內存儲器、CPU、磁盤和自抗擾控制器等多個硬件,系統的內存儲器主要是存放火電系統運行時各個指標的參數數據,系統的磁盤具有輸出和輸入功能,是數據傳輸的通道。具體的系統硬件組成結構如圖1所示。
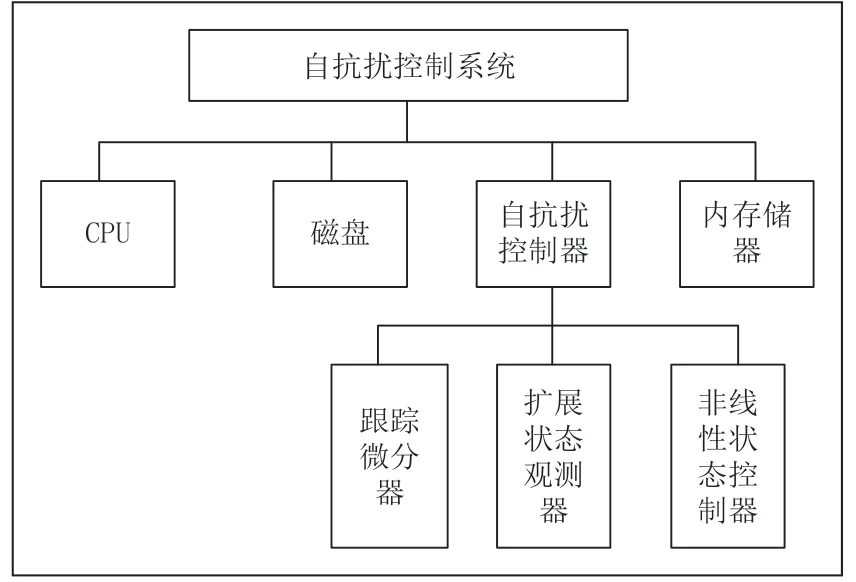
圖1 自抗擾控制系統硬件結構
自抗擾控制系統的硬件是系統的核心部分之一,硬件的性能能夠影響系統的整體運行效果,在設計時,選擇性能好并且靈活性強的硬件。火電機組負荷頻率自抗擾控制系統根據具體的火電系統運行情況進行升級優化,靈活性較強的硬件設施便于自抗擾控制系統的優化。其中自抗擾控制器是硬件結構的核心部分,具有三個子控制器,每一個控制器的控制作用均不相同,跟蹤微分器能夠控制負荷頻率發出的信號,擴展狀態觀測器能夠有效估計未知運行干擾因素,非線性狀態控制器將控制對象的干擾因子進行串聯,分析每個干擾因子之間的關系。采用自抗擾控制器采集每一個干擾因子,分析干擾因子的數據特征,基于人工智能的火電機組負荷率自抗擾控制系統的硬件設計為系統運行提供了一個穩定的運行環境。
2 基于人工智能的火電機組負荷頻率自抗擾控制系統軟件設計
■2.1 設置負荷頻率數據采集模式
首先根據實際的火電機組負荷運行狀態,設置相應的火電機組負荷運行數據采集模式,通過運行模式反饋的參數值,判斷火電機組負荷運行是否處于穩定狀態。火電機組負荷頻率的數據能夠有效反饋火電系統的運行效果和運行質量,采集精準的火電機組負荷頻率數據尤為重要。我國火電系統一般采用低負荷運行方式,火電機組的調峰深度值處于一個額定負荷狀態,調峰的范圍一般在660~270MW之間,如果火電機組的調峰值處于一個正常范圍內,能夠有效降低運行負荷運行成本。火電機組負荷每一種運行程序都會產生一定的數據,各個指標參數也會發生一定的變化,需要根據數據的特點設置不同的數據采集模式,提高采集數據的精準性。采集的運行參數數值如表1所示。
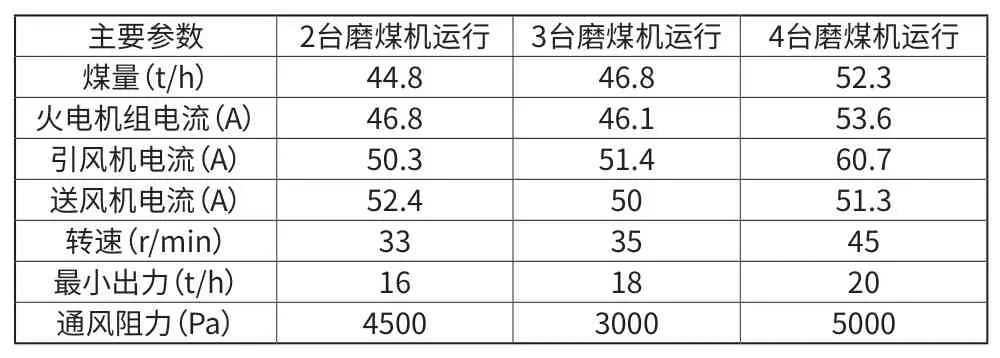
表1 火電機組運行參數數據
由表1可知,火電系統在發電時,一般會采用多個磨煤機運行,不同型號的磨煤機進行組合時,各個參數指標就會發生一定的變化,火電系統的動能也會隨之產生變化。上表的指標參數數據表示火電機組在正常運行中的各個參數指標,系統的數據采集模式需要采集每一個階段的實時數據,如果火電機組負荷運行受到干擾因素的影響,指標數據會發生變化,控制系統可以根據數據的變動,排查火電機組的干擾因素。火電機組負荷運行是整個火電系統的核心部分,負荷的頻率波動情況表示整個火電系統運行的情況,系統中設置的負荷頻率數據采集模式,負荷頻率波動時,可能產生的數據類型不同,數據類型包括文本數據和數值數據等多種形式,控制系統中數據采集模式需要根據數據的類型進行轉化。數據是整個控制系統的運行基礎,需要數據作為控制支撐,數據能夠真實反映火電系統的運行情況、火電內部各個機組之間的關系以及受干擾程度,控制系統將采集數據進行篩選、處理和分析,最終控制系統會根據分析出來的實際情況實施控制。火電機組負荷頻率波動幅度是系統數據采集模塊的中心,它關系整個電力的質量,數據采集模式的設置為系統的軟件設計提供了一個很好的基礎,能夠確保數據的穩定性和準確性。
■2.2 基于人工智能構建火電系統線性模型
在進行火電機組負荷自抗擾控制系統設計時,采用人工智能技術構建火電系統線性模型,用線性模型解決火電機組負荷頻率波動幅度的問題。火電系統的線性模型實際是為了穩定控制器,通過控制器控制火電機組各個負荷頻率,現階段的自抗擾控制系統由于系統性能較差,操作比較復雜,導致控制器在控制時,會出現不穩定的情況。為了提高火電機組負荷頻率自抗擾控制系統的性能,采用先進的人工智能技術提高控制系統的性能,保證系統的穩定性。通過構建的線性模型解決控制器中的參數值,能夠優化控制器結構。首先判斷線性觀測器對總干擾的估計誤差數值,如公式(1)所示。

在公式(1)中,Q表示總干擾估計誤差數值,W表示控制過程的實際輸出值,R表示觀測出來的虛擬控制量,E表示監測控制時間,F表示實際控制值。自抗擾系統在對負荷頻率監控時,采集數據受到外界因素的影響造成一定的干擾,在分析結果時,產生一定的偏差,此時需要計算出誤差值,誤差值越精準,控制系統的控制效果就會更加明顯。利用人工智能技術能夠為火電機組負荷頻率自抗擾控制系統提供系統動力,全面考慮控制系統的運行速度與監測質量的關系,對系統進行全面的描述,系統的運行速度可能會影響系統的自抗擾控制能力。利用函數計算出系統動能和勢能的差值,差值是保證系統穩定運行的基礎,動能和勢能差值如公式(2)所示。

在上述公式中,T表示動能和勢能的差值,Y表示自抗擾控制系統的動能,U表示自抗擾系統的勢能。火電系統構成的部件相對比較復雜,火電機組負荷頻率波動的幅度也會受到各個部件運行的影響,需要分為不同的階段進行自抗擾控制,將火電系統根據運行的模式和運行特點分成多個運行區域,對每一個區域實行實時監控。自抗擾控制系統是將火電機組負荷頻率控制在恒定的頻率范圍之內,并且保證在負荷運行的條件下,火電系統能夠按照計劃運行。基于人工智能構建的線性模型是將影響火電機組負荷頻率的因素進行整合,統計出每一個因素影響的誤差值或者每一個運行流程產生的誤差值,線性模型能夠有效計算出精準的誤差值。基于人工智能構建的線性模型能夠有效監測出火電機組負荷運行的實時數據和歷史數據,充分挖掘出部分潛在數據,為計算誤差值提供依據,構建的線性模型能夠滿足火電機組負荷運行條件,一旦負荷運行發生故障,系統就會及時啟動控制功能,將運行的指標參數控制在正常范圍內,能夠有效提升火電系統運行效率。
■2.3 遺傳算法控制火電機組負荷頻率
設計的火電機組負荷頻率自抗擾控制系統采用遺傳算法對火電機組負荷頻率進行控制,遺傳算法是對遺傳算子進行數學分析,轉化為數學函數問題。遺傳算法在火電機組負荷頻率自抗擾系統中起到一個優化的作用,保障系統能夠有效對負荷運行頻率進行控制,達到最優的控制效果。遺傳算法是以生物進化論理論為基礎,將生物進化論理論過程通過數學的表達方式進行描述,其中遺傳算法提出適者生存的概念,主要作用是在運算過程中保留最優目標值,將多個目標值進行轉化,形成一組新的表達形式,計算出每一組中的最優解,將每組的最優解進行重新排列整合,最終得到全局最優解。將影響火電機組負荷頻率波動幅度的因素作為遺傳算法中的初始化種群,需要對影響因素進行適應度評價,得出一個適應度評價指標。從這些影響因素因子中選擇出適應度較好的因子,每個因子會根據運行的實際情況進行交叉和變異,通過一系列操作,這些因子會產生出新因子,進行迭代計算,通過不斷地反復計算最終得到最優結果。火電機組負荷在運行的過程中,可能會受到很多因素的影響,需要在這些因素中選取適應度最好的因素,將因素看成是遺傳算法中的個體,算出初始群中個體能夠被選中的概率,計算的概率公式如公式(3)所示。

在上述公式中,將初始化種群的大小用n表示,每一個個體的適應度值設置為A,P表示初始群中個體能夠被選中的概率。公式(3)中的描述,采用的是適應度比例方法進行個體選取,還可以采用隨機遍歷抽樣法和分層抽樣方法進行選取,選取出來的個體進行交叉轉換。在遺傳算法的基礎上,采用基本粒子群算法,對系統的空間區域進行劃分,將目標控制空間看成是一個空間維度,空間中的粒子群體可以用公式(4)表示。

在上述公式中,G表示粒子群,D表示單個粒子,i表示粒子數量,計算出每一個粒子的空間維度向量值,如公式(5)所示。

在上述公式中,H表示整體粒子群空間維度向量值,K表示單個粒子向量值。可以將系統的區域空間進行劃分成單個的目標區域,分析目標區域中的因子個體,采用遺傳算法進行局部優化,最終可獲得整體區域的最優解。采用遺傳算法控制火電機組負荷頻率,將頻率波動的幅度控制在最小范圍之內,能夠及時控制其他干擾因素的影響,使控制系統的性能達到最優效果。
3 實驗與分析
■3.1 實驗準備
為檢測基于人工智能設計的火電機組負荷頻率自抗擾控制系統的性能,展開測試實驗,本次實驗分別采用傳統系統和本文系統對火電機組負荷運行進行測試。首先選取某一個火電站,讀取火電站運行時電機的主要參數值,電機主要參數如表2所示。
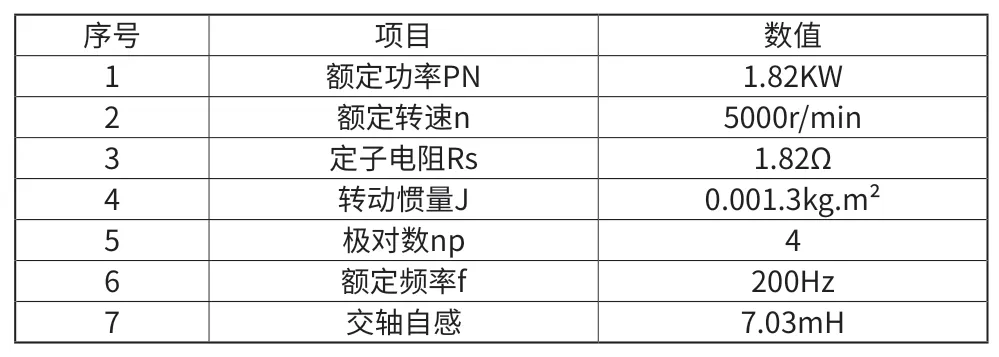
表2 電機主要參數
根據表2可知,為保證實驗的準確性,設置參數指標一致的電機作為本次實驗主要設備。在本文實驗中選用兩種參數值和性能一樣的電機,將兩個電機作為實驗的研究對象,比較兩種系統的控制響應時間。將影響火電機組負荷頻率的因子一共分為10組,每一組都包含不同數量的干擾因子。
■3.2 實驗結果
采用本文系統和傳統系統對火電機組負荷運行進行控制,比較控制響應時間,將設置的10組干擾因子分別用T1、T2、T3、T4、T5、T6、T7、T8、T9、T10表 示,計算自抗擾控制系統分別控制這5組干擾因子的響應時間,控制響應時間如圖2所示。
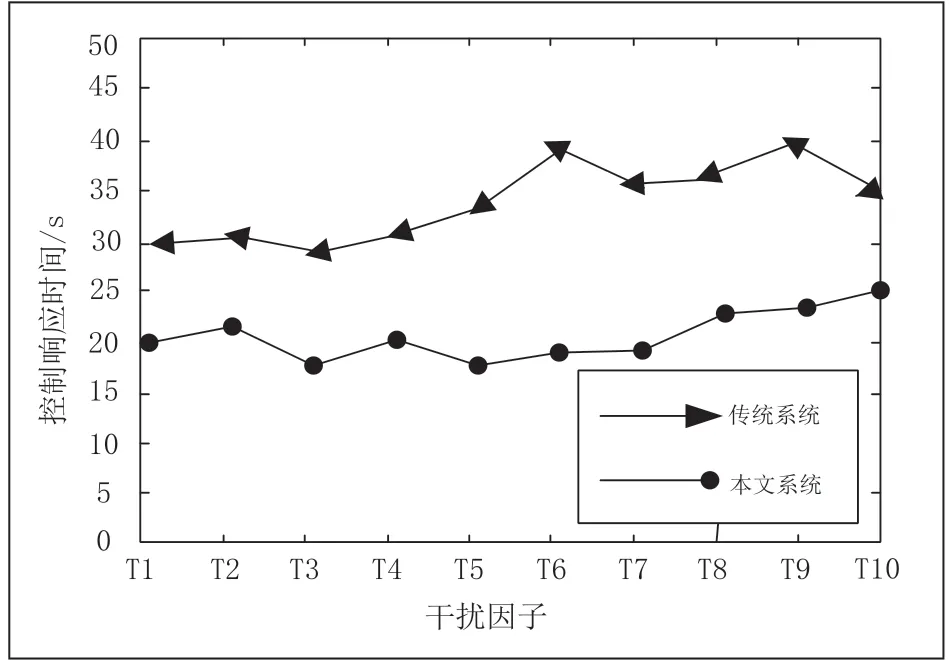
圖2 控制響應時間結果
根據圖2可知,在每組干擾因子數量相同的情況下,本文系統的控制響應時間比傳統系統的控制響應時間更短,經計算,本文系統的平均控制響應時間為21s,傳統系統的平均控制響應時間為33.2s,本文系統的控制響應時間比傳統系統縮短12.2s,基于人工智能設計的火電機組負荷頻率自抗擾控制系統控制響應的時間更快,能夠及時做出控制反應,說明本文系統的運行性能效果更好。
4 結束語
本文研究基于人工智能設計的火電機組負荷頻率自抗擾控制系統,能夠有效控制火電機組負荷頻率波動幅度,抗干擾能力好,保證火電系統能夠正常運行。由于設置的自抗擾控制系統的參數種類較多,一旦參數指標發生偏差會影響整個控制系統,采用遺傳算法解決自抗擾控制系統的穩定性。本文基于人工智能設計的自抗擾控制系統還存在一些問題,設置的自抗擾控制器參數種類較多,增加操作的難度,希望在下一次研究中簡化控制器參數類型,降低操作難度,不斷優化火電機組負荷頻率自抗擾控制系統的性能。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
西安航空學院學報(2022年2期)2022-07-04 07:45:42
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
商界(2019年12期)2019-01-03 06:59:05
IT經理世界(2018年20期)2018-10-24 02:38:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
小康(2017年16期)2017-06-07 09:00:59
