池塘養(yǎng)殖底污自動(dòng)清理系統(tǒng)設(shè)計(jì)與應(yīng)用
2022-02-15 14:47:16馬曉飛袁永明王蕓張紅燕沈楠楠
江蘇農(nóng)業(yè)科學(xué) 2022年2期
關(guān)鍵詞:自動(dòng)控制系統(tǒng)
馬曉飛 袁永明 王蕓 張紅燕 沈楠楠




摘要:應(yīng)用PLC可編程邏輯控制器聯(lián)合自動(dòng)控制技術(shù),設(shè)計(jì)并構(gòu)建一種適用于池塘養(yǎng)殖的具有底污定向沉降、定時(shí)吸污、排污與沖洗循環(huán)工作等功能的底污自動(dòng)清理系統(tǒng),以期能夠?yàn)槌靥琉B(yǎng)殖水質(zhì)控制、增產(chǎn)增效提供一定的技術(shù)支持。對養(yǎng)殖池塘底部進(jìn)行積污池硬化改造,配合變頻水車式增氧機(jī)實(shí)現(xiàn)養(yǎng)殖池塘底污定向沉降。選用養(yǎng)殖池塘殘餌及糞便自動(dòng)抽取裝置作為積污池底污自動(dòng)抽取設(shè)備,實(shí)現(xiàn)養(yǎng)殖底污的高效抽離。使用安裝有高密度濾網(wǎng)的高壓板式壓濾機(jī)作為養(yǎng)殖底污固液分離裝置,從而實(shí)現(xiàn)底泥固化轉(zhuǎn)移和尾水清潔回排。選用西門子S7-200作為系統(tǒng)智能控制器,實(shí)現(xiàn)自動(dòng)設(shè)備的周期性定時(shí)控制,配合安全穩(wěn)定的電氣控制設(shè)備,實(shí)現(xiàn)系統(tǒng)硬件設(shè)備的自動(dòng)控制。底污自動(dòng)清理系統(tǒng)能夠保證硬件設(shè)備協(xié)同工作、有效運(yùn)轉(zhuǎn),在養(yǎng)殖試驗(yàn)中取得了優(yōu)異的應(yīng)用效果,有效實(shí)現(xiàn)了底污定向沉降。通過池塘養(yǎng)殖底污自動(dòng)清理系統(tǒng)設(shè)計(jì)與應(yīng)用,初步實(shí)現(xiàn)了池塘養(yǎng)殖底污的定向沉降、底污清理固化轉(zhuǎn)移以及尾水清潔回排,能夠有效應(yīng)用于池塘養(yǎng)殖生產(chǎn),并為實(shí)現(xiàn)池塘養(yǎng)殖自動(dòng)化與信息化提供技術(shù)支持。
關(guān)鍵詞:池塘養(yǎng)殖;底污;定向沉降;固液分離;自動(dòng)控制系統(tǒng)
中圖分類號: S969;TP273? 文獻(xiàn)標(biāo)志碼: A
文章編號:1002-1302(2022)02-0198-08
收稿日期:2021-04-14
基金項(xiàng)目:中國水產(chǎn)科學(xué)研究院淡水漁業(yè)研究中心基本科研業(yè)務(wù)費(fèi)專項(xiàng)資金(編號:2019JBFM07);中央級公益性科研院所基本科研業(yè)務(wù)費(fèi)專項(xiàng)基金(編號:2020TD37);現(xiàn)代農(nóng)業(yè)產(chǎn)業(yè)技術(shù)體系專項(xiàng)“特色淡水魚產(chǎn)業(yè)體系”(編號:CARS-46)
作者簡介:馬曉飛(1989—),男,山東陽信人,碩士,助理研究員,主要從事漁業(yè)經(jīng)濟(jì)與信息技術(shù)應(yīng)用研究。E-mail:maxf@ffrc.cn。
通信作者:袁永明,研究員,主要從事漁業(yè)經(jīng)濟(jì)與信息技術(shù)研究。E-mail:yuan@ffrc.cn。
池塘養(yǎng)殖底污主要是養(yǎng)殖過程中殘余的餌料、養(yǎng)殖生物排泄物以及殘骸在池塘內(nèi)沉積而產(chǎn)生的污染物,當(dāng)?shù)孜畚镔|(zhì)在養(yǎng)殖水體過量堆積和分解會抑制水體自凈能力,進(jìn)而導(dǎo)致水質(zhì)惡化、養(yǎng)殖生物病害、翻塘等嚴(yán)重后果。相關(guān)研究表明,養(yǎng)殖池塘中總氮和總磷等污染物主要通過餌料投喂等方式輸入,而大部分的氮磷物質(zhì)最終會在養(yǎng)殖池塘底部沉積[1-3]。除殘餌外,養(yǎng)殖生物的殘骸及排泄物的絕大部分也會沉積在底泥中,當(dāng)水體環(huán)境發(fā)生改變,底泥中的沉積物會分解釋放污染物質(zhì),導(dǎo)致水質(zhì)惡化。底污有機(jī)物質(zhì)的不完全分解會釋放大量對養(yǎng)殖生物有毒害作用的中間產(chǎn)物,如NH-3-N、NO-2-N、H2S等,會導(dǎo)致養(yǎng)殖生物出現(xiàn)更多的病害。依據(jù)相關(guān)試驗(yàn),養(yǎng)殖池塘的底泥沉積物在一個(gè)養(yǎng)殖周期內(nèi)的積累量最高可達(dá)1.85×105~1.99×105 kg/hm2,底泥厚度平均每年增加6~8 cm,其中精養(yǎng)池塘、高密度養(yǎng)殖塘以及有生活污水排入的池塘淤泥累積的速度更快。目前,養(yǎng)殖池塘底泥清理主要通過人工或機(jī)械清淤作業(yè)方式完成[4],人工清淤費(fèi)時(shí)費(fèi)力且效率較低,而機(jī)械清淤成本較高且受池塘地形地貌、作業(yè)距離等條件影響較大,現(xiàn)有的機(jī)械清污方式只是簡單地替代了最原始的人工清污過程,尚不能滿足現(xiàn)代化漁業(yè)生產(chǎn)的實(shí)際需要。因此,開展池塘養(yǎng)殖底污自動(dòng)清理技術(shù)的相關(guān)研究并設(shè)計(jì)開發(fā)一種能夠有效控制水體污染物定向沉降、泥漿泵設(shè)備定時(shí)吸污并通過底污固液分離進(jìn)而實(shí)現(xiàn)污泥壓濾轉(zhuǎn)移和尾水凈化回排的池塘養(yǎng)殖底污自動(dòng)清理系統(tǒng),具有一定的必要性和迫切性。
基于上述原因,本研究設(shè)計(jì)與開發(fā)了適用于池塘養(yǎng)殖環(huán)境的底污自動(dòng)清理系統(tǒng):系統(tǒng)終端控制器選用西門子S7-200系列PLC[5],實(shí)現(xiàn)自動(dòng)設(shè)備的周期性定時(shí)控制,配合安全穩(wěn)定的電氣控制設(shè)備,實(shí)現(xiàn)系統(tǒng)硬件設(shè)備的自動(dòng)控制;通過對養(yǎng)殖池塘底部進(jìn)行積污池硬化改造,系統(tǒng)智能控制變頻水車式增氧機(jī)實(shí)現(xiàn)養(yǎng)殖殘餌、糞便等池塘底污向積污池定向沉降;系統(tǒng)定時(shí)控制養(yǎng)殖池塘殘餌及糞便自動(dòng)抽取裝置作為積污池底污自動(dòng)抽取設(shè)備,實(shí)現(xiàn)養(yǎng)殖底污的高效抽離;系統(tǒng)通過控制安裝有高密度濾網(wǎng)的高壓板式壓濾機(jī)實(shí)現(xiàn)養(yǎng)殖底污固液分離,從而進(jìn)一步實(shí)現(xiàn)底泥固化轉(zhuǎn)移和尾水清潔回排。系統(tǒng)具有精準(zhǔn)控制、運(yùn)行可靠、可移植性高等特點(diǎn),初步實(shí)現(xiàn)了池塘養(yǎng)殖底污的定向沉降、底污清理固化轉(zhuǎn)移以及尾水清潔回排,能夠有效應(yīng)用于池塘養(yǎng)殖生產(chǎn),并為實(shí)現(xiàn)池塘養(yǎng)殖自動(dòng)化與信息化提供技術(shù)支持。
1 系統(tǒng)需求與總體設(shè)計(jì)
系統(tǒng)需求及設(shè)計(jì)以羅非魚高密度池塘養(yǎng)殖為基礎(chǔ),羅非魚高密度池塘養(yǎng)殖具有養(yǎng)殖密度高、飼料投喂量大等特點(diǎn),結(jié)合試驗(yàn)觀察,羅非魚糞便排出初段具有膜性包被且漂浮于養(yǎng)殖水體[6-8]。羅非魚高密度池塘養(yǎng)殖底污積累量較大且羅非魚糞便的初段漂浮特性,適用于池塘養(yǎng)殖底污自動(dòng)清理系統(tǒng)的有效應(yīng)用。綜合養(yǎng)殖實(shí)際需求,開展池塘養(yǎng)殖底污自動(dòng)清理系統(tǒng)需求分析和總體設(shè)計(jì),系統(tǒng)主要包括底污定向沉降控制模塊、底污抽取控制模塊、固液壓濾分離控制模塊、系統(tǒng)總控單元以及自動(dòng)化養(yǎng)殖設(shè)備等軟硬件功能模塊組成。系統(tǒng)涉及自動(dòng)化養(yǎng)殖設(shè)備主要包括變頻水車式增氧機(jī)、養(yǎng)殖池塘殘餌及糞便自動(dòng)抽取裝置(CN201610321045.8)[9]、高壓板式壓濾機(jī)[10]等,養(yǎng)殖設(shè)備供電及控制線路接入系統(tǒng)總控制配電箱;系統(tǒng)終端控制器選用西門子S7-200系列PLC(S7-200 CPU224 XP AC/DC/RELAY),該類型PLC控制器標(biāo)配有繼電器輸出10組、光電隔離型開關(guān)量輸入14組、2路支持 ModBus-RTU 協(xié)議的RS-485通信口并內(nèi)置萬年歷及實(shí)時(shí)時(shí)鐘,滿足系統(tǒng)控制輸出、反饋信號輸入及通信需求,終端控制器通過DTU模塊同物聯(lián)服務(wù)器進(jìn)行通信和數(shù)據(jù)傳輸[11]。終端控制器作為養(yǎng)殖現(xiàn)場控制中心,能夠有效協(xié)調(diào)系統(tǒng)軟硬件設(shè)備協(xié)同工作,通過多設(shè)備控制與反饋輸入?yún)f(xié)作保障底污定向沉降、底污抽取以及固液壓濾分離等各項(xiàng)控制和監(jiān)測反饋功能的實(shí)現(xiàn)。
系統(tǒng)運(yùn)行時(shí),用戶通過現(xiàn)場配置終端將系統(tǒng)運(yùn)行控制方案錄入系統(tǒng)終端控制器;系統(tǒng)使用過程中,終端控制器通過控制變頻水車式增氧機(jī)實(shí)現(xiàn)養(yǎng)殖殘餌、糞便等池塘底污向積污池定向沉降,在沉降池廢棄物累積量達(dá)到設(shè)定閾值或定時(shí)器達(dá)到設(shè)定定時(shí)運(yùn)行周期時(shí),控制器控制養(yǎng)殖池塘殘餌及糞便自動(dòng)抽取裝置運(yùn)行,通過吸污管吸污以及沖洗管對周圍積污的反沖洗實(shí)現(xiàn)養(yǎng)殖底污的高效抽離,系統(tǒng)通過控制安裝有高密度濾網(wǎng)的高壓板式壓濾機(jī)實(shí)現(xiàn)養(yǎng)殖底污固液分離,從而進(jìn)一步實(shí)現(xiàn)底泥固化轉(zhuǎn)移和尾水清潔回排。系統(tǒng)控制流程見圖1。
2 系統(tǒng)設(shè)計(jì)與開發(fā)
2.1 系統(tǒng)硬件設(shè)計(jì)與集成
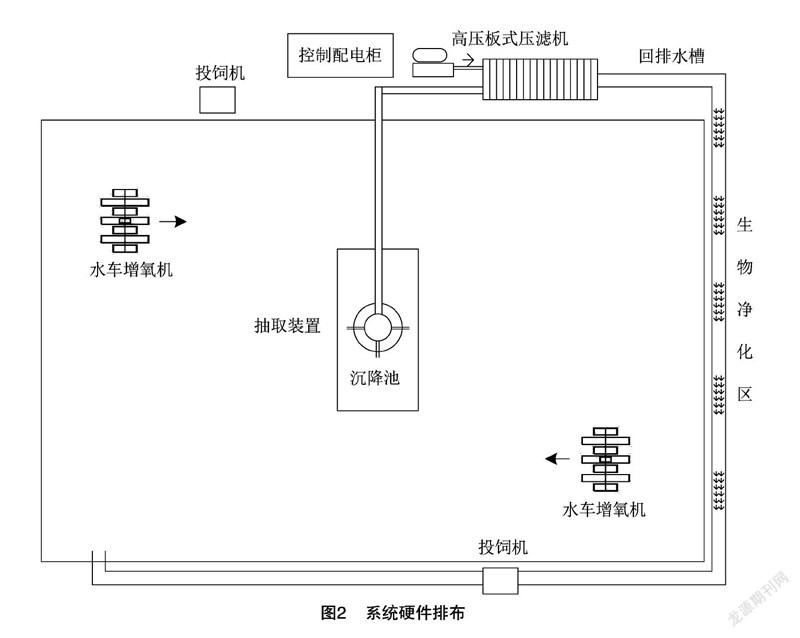
系統(tǒng)硬件設(shè)備主要包括總控制配電箱、水車式增氧機(jī)、養(yǎng)殖池塘殘餌及糞便自動(dòng)抽取裝置、高壓板式壓濾機(jī)等,系統(tǒng)由主控制器控制運(yùn)行流程,各設(shè)備之間分工協(xié)作、有效保證系統(tǒng)的穩(wěn)定高效運(yùn)轉(zhuǎn)。系統(tǒng)硬件設(shè)備排布平面(非等比例)見圖2。
系統(tǒng)控制配電箱負(fù)責(zé)系統(tǒng)設(shè)備的配電管理,通過智能控制器協(xié)調(diào)控制各個(gè)系統(tǒng)硬件設(shè)備的有效運(yùn)轉(zhuǎn);選取池塘上風(fēng)口及對角位置安裝水車式增氧機(jī)設(shè)備,通過變頻控制技術(shù)由控制器控制水車式增氧機(jī)運(yùn)行速度、引導(dǎo)水體懸浮物定向沉降;前期池塘改造過程中,在2組水車式增氧機(jī)水流轉(zhuǎn)向交匯處設(shè)置沉降池,將養(yǎng)殖池塘殘餌及糞便自動(dòng)抽取裝置安裝在沉降池內(nèi)并由控制器控制設(shè)備的正常運(yùn)行、吸取附近沉降物并反沖洗周圍沉積物;將成套高壓板式壓濾機(jī)設(shè)備安裝固定在岸邊平整基礎(chǔ)上并連接進(jìn)排水管道設(shè)施,完成抽取泥漿的固液分離以及尾水回排。
2.2 系統(tǒng)功能設(shè)計(jì)及實(shí)現(xiàn)
系統(tǒng)主要包括定向沉降、底污抽取、固液分離、現(xiàn)場配置及報(bào)警等功能模塊,系統(tǒng)控制器的各個(gè)功能模塊分別完成相關(guān)硬件設(shè)備的狀態(tài)監(jiān)測及智能控制。根據(jù)系統(tǒng)主要功能需求,選擇西門子S7-200 系列小型可編程邏輯控制器(PLC)作為系統(tǒng)主控制器[12-14],具體型號為 CPU224XP AC/DC/RLY,該型號PLC控制器具有14 路開關(guān)量輸入和10路繼電器輸出,并配有2 路模擬量輸入和1 路模擬量輸出,采用2口RS232/485 通訊,支持PPI、ModBus、MPI 以及自由口通訊協(xié)議;選用EM 223-4DI/4RLY擴(kuò)展模塊作為變頻水車式增氧機(jī)和高壓板式壓濾機(jī)設(shè)備的擴(kuò)展控制和檢測模塊;基于西門子 S7-200 系列PLC,選取兼容西門子TD-200系列單色文本顯示屏作為現(xiàn)場配置終端,使用西門子STEP 7-Micro/WIN V4.0.9及耐特TP-200 V4.7.9 作為PLC及顯示屏開發(fā)平臺進(jìn)行系統(tǒng)控制器功能設(shè)計(jì)及軟件開發(fā)。
2.2.1 定向沉降功能
河流及池塘懸浮物沉降和底泥再懸浮沉降的相關(guān)研究表明:在水體流動(dòng)條件下,底泥沿主流方向呈曲線漸減分布,且主要集中在進(jìn)水口1/3范圍內(nèi)[15];風(fēng)向?qū)Φ啄喾植加绊懖幻黠@,水體流動(dòng)轉(zhuǎn)向及循環(huán)離心作用是造成外側(cè)沉積物較多的重要原因[16];懸浮物沉降及底泥再懸浮具有一定的起動(dòng)流速,不同的流速能夠影響懸浮物的擴(kuò)散和沉降范圍[17];在一定流速條件下,底部水平面的沉降通量呈現(xiàn)先增加、后穩(wěn)定的變化趨勢,底泥再懸浮的懸浮通量總量隨流速增大而增加,且中高流速條件下再懸浮通量增長迅速[18]。
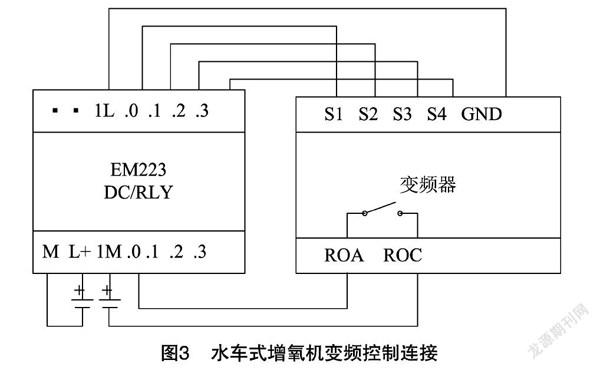
基于上述原理,使用變頻控制技術(shù)實(shí)現(xiàn)水車式增氧機(jī)的轉(zhuǎn)速調(diào)控,從而保證水體流動(dòng)具有一定的流速,并結(jié)合池塘環(huán)境因素控制水流自循環(huán)拐點(diǎn),能夠有效實(shí)現(xiàn)池塘懸浮物的定向轉(zhuǎn)移沉降,將40%以上殘餌、糞便等懸浮物定向轉(zhuǎn)移至沉降池附近完成沉降。系統(tǒng)使用2臺EM 223-4DI/4RLY擴(kuò)展模塊作為變頻水車增氧機(jī)的控制和狀態(tài)監(jiān)測模塊:通過4路數(shù)字量輸出共7段速控制變頻器調(diào)速運(yùn)行,其中Q3.0、Q4.0分別控制變頻器啟動(dòng),Q3.1-Q3.3、Q4.1-Q4.3控制運(yùn)行速度;使用1路數(shù)字量輸入(I3.0、I4.0)監(jiān)測變頻器運(yùn)行狀態(tài),并通過判斷輸入狀態(tài)異常進(jìn)行故障報(bào)警。控制器控制水車式增氧機(jī)轉(zhuǎn)速,以推動(dòng)水體懸浮物定向沉降,通過現(xiàn)場手動(dòng)控制實(shí)現(xiàn)水車式增氧機(jī)全速運(yùn)行以完成應(yīng)急增氧功能(圖3)。
水車增氧機(jī)變頻控制的激發(fā)動(dòng)作主要是定時(shí)器,水產(chǎn)增氧機(jī)高速運(yùn)轉(zhuǎn)定時(shí)器設(shè)置由養(yǎng)殖對象的投飼時(shí)段以及集中排便時(shí)間段決定。根據(jù)傳統(tǒng)池塘養(yǎng)殖經(jīng)驗(yàn),在每次投喂結(jié)束0.5 h左右開啟水車式增氧機(jī),在養(yǎng)殖對象的排便高峰時(shí)間段(以吉富羅非魚為例,每天20:00—21:00[19])開啟水車式增氧機(jī),推動(dòng)殘餌和糞便定向沉降,單次運(yùn)轉(zhuǎn)時(shí)長根據(jù)養(yǎng)殖對象生長階段和當(dāng)日投喂量由用戶設(shè)置;普通時(shí)間段,水車式增氧機(jī)保證中速運(yùn)行,保障池塘水體內(nèi)循環(huán)流動(dòng),用戶也可以為系統(tǒng)配置水質(zhì)監(jiān)測設(shè)備,根據(jù)池塘水質(zhì)狀況聯(lián)動(dòng)控制水車式增氧機(jī)應(yīng)急增氧。
2.2.2 底污抽取及反沖洗控制功能
現(xiàn)階段池塘底泥廢棄物清理主要在養(yǎng)殖過程完成后采用清塘方式進(jìn)行[20],而養(yǎng)殖過程中池塘底層廢棄物清理難度較大,一般使用泥漿泵等設(shè)備在重點(diǎn)區(qū)域進(jìn)行抽取并通過沉淀、過濾等方式進(jìn)行轉(zhuǎn)移[4]。而現(xiàn)有的泥漿泵只能采集抽取較小范圍內(nèi)底層廢棄物且不能夠?qū)崿F(xiàn)自動(dòng)化采集控制,采集清理效率較為低下。
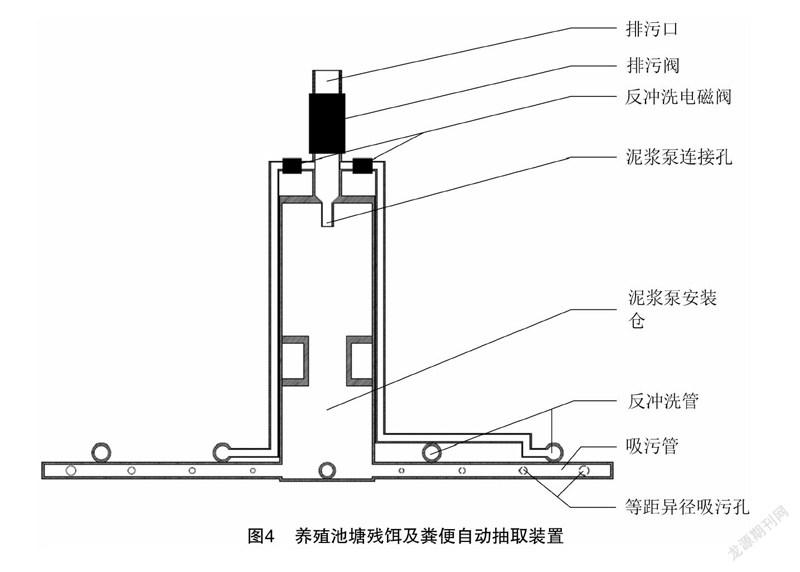
針對上述問題,選用具有自主知識產(chǎn)權(quán)的《一種養(yǎng)殖池塘殘餌及糞便自動(dòng)抽取裝置》(ZL201610321045.8,圖4)作為底污抽取及反沖洗裝置,將裝置安裝放置在沉降池底部中心位置,通過控制器控制裝置運(yùn)行實(shí)現(xiàn)底污抽取及反沖洗功能。對于底污抽取及反沖洗裝置,控制器控制對象主要包括泥漿泵、排污電動(dòng)球閥、清洗電磁閥等,系統(tǒng)使用控制器CPU自帶數(shù)字量輸入和繼電器輸出模塊作為裝置控制和狀態(tài)監(jiān)測模塊。使用Q0.0、Q0.2分別連接高負(fù)載中間繼電器控制2組清洗電磁閥,使用Q0.1、Q0.3直接控制清洗電磁閥故障報(bào)警信號燈,使用Q0.4連接中間繼電器控制排污電動(dòng)球閥、Q0.6控制排污球閥故障報(bào)警信號燈,使用Q0.7連接交流接觸器控制泥漿泵、Q1.1控制泥漿泵故障報(bào)警信號燈;使用I0.0監(jiān)測系統(tǒng)運(yùn)行狀態(tài)、I0.1、I0.2監(jiān)測清洗電磁閥狀態(tài)、I0.3監(jiān)測排污球閥狀態(tài)、I0.4監(jiān)測泥漿泵狀態(tài)。
底污抽取及反沖洗控制的激發(fā)動(dòng)作為控制器內(nèi)置萬年歷,用戶根據(jù)養(yǎng)殖對象不同生長階段的生理狀態(tài),設(shè)置底污抽取及反沖洗控制的激發(fā)周期和單次運(yùn)轉(zhuǎn)時(shí)長。運(yùn)行時(shí),系統(tǒng)判斷控制器輸入輸出狀態(tài),無故障和輸出狀態(tài)條件下,開啟排污閥并獲取排污閥狀態(tài)輸入,延時(shí)15 s開啟泥漿泵,定時(shí)30 s排空管道內(nèi)前次凈水;30 s抽泥定時(shí)器運(yùn)行,關(guān)閉排污閥和開啟反沖洗電磁閥并判斷對應(yīng)狀態(tài),15 s反沖洗定時(shí)器運(yùn)行,開啟排污閥和關(guān)閉反沖洗電磁閥并判斷對應(yīng)狀態(tài),根據(jù)用戶設(shè)置的單次吸污時(shí)長確定抽泥定時(shí)器-關(guān)/開閥-反沖洗定時(shí)器-開/關(guān)閥流程的循環(huán)次數(shù);吸污循環(huán)結(jié)束,關(guān)閉泥漿泵,延時(shí)15 s關(guān)閉排污閥,單次底污抽取及反沖洗控制結(jié)束,功能模塊進(jìn)入待機(jī)狀態(tài)。
2.2.3 固液分離壓濾功能
對于養(yǎng)殖過程中以任何方式抽取出的底泥及廢棄物以及在1個(gè)或多個(gè)養(yǎng)殖周期結(jié)束后通過干塘、沖刷抽取或挖掘等手段轉(zhuǎn)移出的池塘淤積底泥,都需要在岸基進(jìn)行固液分離以便于轉(zhuǎn)移,而目前對于池塘底泥固液分離的主要方法仍然是自然晾曬,即移出池塘堆放在閑置土地上,通過風(fēng)吹、日曬、自然下滲等物理過程使池塘底泥水分自然蒸發(fā)[21-22]。該方法雖然操作簡單、后續(xù)處理方便,但受到土地、天氣等諸多因素限制,自然脫水周期長、實(shí)際施工難度大。
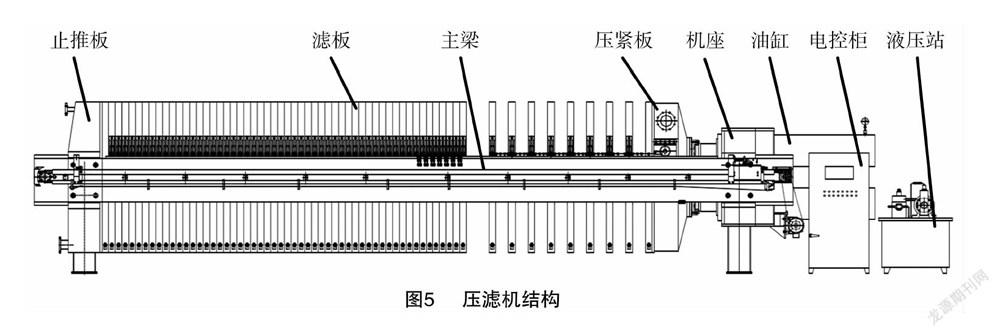
高壓板式壓濾機(jī)(圖5)是一種固液分離機(jī)械設(shè)備[23],適用于難以分離的細(xì)黏性物的過濾,目前在河道清淤、污水處理等領(lǐng)域普遍應(yīng)用。池塘養(yǎng)殖底污自動(dòng)清理系統(tǒng)使用TJYZ40/1000型小型高壓板式壓濾機(jī),該壓濾機(jī)配備有效壓濾面積為20 m2的4218丙綸濾布、重力自由出液、濾餅厚度40 mm、最大處理量為2~3 t/h、額定功率13.0 kW,并配套有電控設(shè)備。對于壓濾機(jī),池塘養(yǎng)殖底污自動(dòng)清理系統(tǒng)主要通過同壓濾機(jī)配套控制器的通信來控制及監(jiān)測壓濾機(jī)的正常運(yùn)行并輸出故障報(bào)警信息。
固液分離壓濾控制的激發(fā)動(dòng)作分為壓緊濾板和壓濾。當(dāng)壓濾系統(tǒng)為待機(jī)狀態(tài)(濾板分離未壓緊)且當(dāng)前時(shí)間距離下次底污抽取及反沖洗控制啟動(dòng)時(shí)間為30 min時(shí),激發(fā)壓緊濾板控制:系統(tǒng)向壓濾控制器發(fā)送指令,控制液壓系統(tǒng)運(yùn)行將壓緊板向止推板方向移動(dòng),將全部濾板壓緊,等待泥漿由進(jìn)料口輸送入濾室,開始固液分離壓濾控制周期。壓濾的激發(fā)動(dòng)作是壓濾機(jī)進(jìn)料口壓力信號,當(dāng)進(jìn)料口泥漿輸入壓力長時(shí)間過大、系統(tǒng)判定壓濾機(jī)濾板間固體物質(zhì)達(dá)到累計(jì)上限,啟動(dòng)壓濾控制:系統(tǒng)控制器控制關(guān)閉進(jìn)料閥門,使用空氣壓縮機(jī)為濾室加壓并實(shí)時(shí)監(jiān)測壓力,壓濾過程所需時(shí)間根據(jù)池塘泥漿特性和脫水要求進(jìn)行設(shè)定,達(dá)到規(guī)定壓濾時(shí)間,停止加壓,打開進(jìn)料閥門,完成壓濾過程;控制液壓系統(tǒng)將壓緊板退回起點(diǎn),控制壓濾機(jī)傳動(dòng)裝置拉開濾板,使濾餅自由脫落,將濾餅轉(zhuǎn)移利用,壓濾系統(tǒng)進(jìn)入待機(jī)狀態(tài)。
3 系統(tǒng)應(yīng)用
池塘養(yǎng)殖底污自動(dòng)清理系統(tǒng)開發(fā)集成完成后,應(yīng)用于高密度羅非魚池塘養(yǎng)殖生產(chǎn),實(shí)現(xiàn)池塘養(yǎng)殖底污定向沉降、抽取以及固液壓濾分離等各項(xiàng)功能的控制和監(jiān)測反饋。
根據(jù)養(yǎng)殖生產(chǎn)實(shí)際情況并結(jié)合系統(tǒng)設(shè)計(jì)及硬件集成要求:在試驗(yàn)開始前,在池塘中心位置設(shè)置長4 m×寬4 m×深1 m的水泥固化沉降池,并安裝固定成套養(yǎng)殖池塘殘餌及糞便自動(dòng)抽取裝置,將泥漿輸送管路沿池底排布至岸基并連接增壓泵,用于底污自動(dòng)抽取及反沖洗應(yīng)用測試;為應(yīng)用試驗(yàn)池塘配置2臺2.2 kW水車式增氧機(jī),并配備冗余功率變頻控制器,用于系統(tǒng)定向沉降功能的應(yīng)用測試;在岸基硬化平臺上安裝成套高壓板式壓濾機(jī)設(shè)備,用于系統(tǒng)固液分離功能的應(yīng)用測試;在壓濾機(jī)濾出液排液孔下布置導(dǎo)流水槽,將濾出液導(dǎo)流入岸邊回排水槽,通過多級生物凈化后回排入養(yǎng)殖池塘,通過檢測濾出液和回排液體水體指標(biāo),測試系統(tǒng)固液分離及凈化效果。
根據(jù)系統(tǒng)應(yīng)用試驗(yàn)需求,于2019年6月至2020年9月在海南省海口市三江鎮(zhèn)羅非魚養(yǎng)殖場開展羅非魚池塘養(yǎng)殖底污自動(dòng)清理系統(tǒng)應(yīng)用試驗(yàn),試驗(yàn)池塘面積約為3 335 m2(約80 m×40 m),池深2.0~2.5 m,底鋪地膜防止?jié)B漏。6月初放養(yǎng) 3 cm/尾,羅非魚苗8 000尾/667 m2,羅非魚每天投喂2次,分別為08:00—09:00、17:00—18:00,每日飼料投喂量占魚體質(zhì)量3%~5%,視羅非魚攝食情況及天氣、水質(zhì)等情況適當(dāng)增減。養(yǎng)殖全程約 168 d,根據(jù)系統(tǒng)應(yīng)用試驗(yàn)要求,養(yǎng)殖前期(約60 d)羅非魚規(guī)格較小、投飼量及排泄量較少,主要進(jìn)行殘餌、排泄物沉降規(guī)律以及定向沉降技術(shù)應(yīng)用試驗(yàn);養(yǎng)殖后期(約100 d)投喂量和排泄量顯著增加,開展系統(tǒng)底污抽取及固液分離功能應(yīng)用試驗(yàn)。
殘餌、排泄物沉降規(guī)律以及定向沉降應(yīng)用試驗(yàn)中,根據(jù)水車式增氧機(jī)轉(zhuǎn)速及變頻器頻率設(shè)置4組對照(頻率為0、30、40、50 Hz,水車式增氧機(jī)額定功率2.2 kW),使用活塞式底泥采樣器分別在水車式增氧機(jī)水流方向區(qū)域內(nèi)采樣,采樣時(shí)間為當(dāng)日每次投飼結(jié)束1 h和當(dāng)日22:00,通過測量采樣管內(nèi)殘餌及排泄物累積厚度初步確定采樣點(diǎn)沉積物數(shù)量,通過對比不同試驗(yàn)組相對沉積量總結(jié)羅非魚養(yǎng)殖殘餌、排泄物沉降規(guī)律并確定實(shí)現(xiàn)定向沉降的水車式增氧機(jī)運(yùn)行頻率。
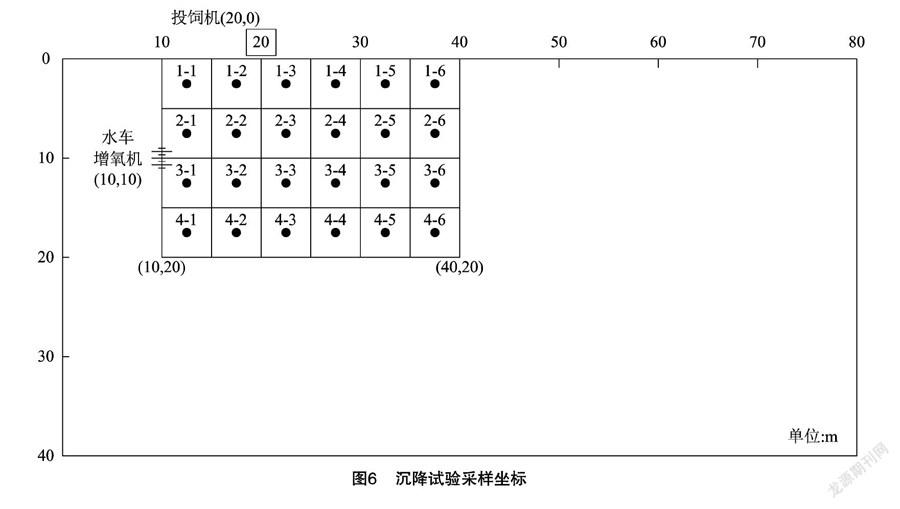
根據(jù)養(yǎng)殖池塘面積將池塘劃分為80 m×40 m坐標(biāo)系,其中投飼機(jī)安裝位置坐標(biāo)為(20,0),水車式增氧機(jī)的安裝位置坐標(biāo)為(10,10),在水車式增氧機(jī)后端劃定30 m×20 m區(qū)域?yàn)槌练e物采樣區(qū)域,使用樣方法采樣,將采樣區(qū)域等面積劃分為24個(gè)樣方,單樣方面積25 m2,選取樣方中心位置為采樣點(diǎn)位,沉降試驗(yàn)采樣位點(diǎn)坐標(biāo)圖見圖6;設(shè)置4組水車式增氧機(jī)不同運(yùn)轉(zhuǎn)頻率條件下的底污沉降對照試驗(yàn),使用活塞式底泥采樣器采集底泥樣品,測量采樣管內(nèi)殘餌及排泄物累積厚度,4組試驗(yàn)的殘餌、排泄物等底污沉降規(guī)律見圖7。
從圖7-a可以看出,由于長期定點(diǎn)投喂對羅非魚攝食習(xí)慣的訓(xùn)練養(yǎng)成,殘餌及排泄物等底污主要沉積在投飼區(qū)域附近。預(yù)試驗(yàn)發(fā)現(xiàn),變頻器輸出頻率低于 25 Hz 時(shí),水車式增氧機(jī)推流作用不明顯,故試驗(yàn)設(shè)定30 Hz為低頻率,50 Hz為民用供電的最大頻率,取二者平均值40 Hz作為試驗(yàn)的中間頻率;在水車式增氧機(jī)低頻率工作時(shí)(圖7-b),沉降總體規(guī)律變化不明顯,但外圍沉積有向水流方向變化趨勢,表明沉積物的沉降轉(zhuǎn)移需要一定的啟動(dòng)流速,2.2 kW水車式增氧機(jī)在30 Hz時(shí),流速未達(dá)到啟動(dòng)速度;中頻率工作時(shí)(圖7-c),底污沉降發(fā)生較為明顯的右移,受池內(nèi)水流小循環(huán)的影響,沉積物外圍向右上和右下方位擴(kuò)散;高頻率工作時(shí)(圖7-d),底污沉降右移明顯,沉積物受回流水流離心力作用在外圍較為集中沉降。
使用活塞式底泥采樣器采集沉降池內(nèi)底泥,觀察底泥采樣厚度超過200 mm時(shí),開展系統(tǒng)底污抽取及固液分離功能應(yīng)用試驗(yàn),使用養(yǎng)殖池塘殘餌及糞便自動(dòng)抽取裝置抽取底泥廢棄物并反沖洗吸空部位提高吸污效率,吸取出的泥漿通過加壓泵直接輸送進(jìn)入壓濾機(jī)濾室進(jìn)行重力式自然過濾,多次輸料直至進(jìn)料口壓力過限,壓濾機(jī)加壓過濾并脫離泥餅,濾液由排液龍頭排出并進(jìn)入多級生物凈化水槽。固液分離效果見圖8。
養(yǎng)殖池塘殘餌及糞便自動(dòng)抽取裝置能夠?qū)⒀b置安裝范圍內(nèi)85%以上的底泥廢棄物抽取并輸送入壓濾機(jī)設(shè)備,受限于養(yǎng)殖水質(zhì)要求,泥漿不能夠添加絮凝劑、固化劑等化學(xué)制劑,導(dǎo)致壓濾效率較低,需要多次抽取泥漿并加壓過濾;壓濾完成后,泥餅為含水率60%~65%的塑化狀態(tài),成型且不易流動(dòng),有效降低了轉(zhuǎn)移難度;壓濾后濾液清澈、無異味,固液分離主要水化因子測量方法參照文獻(xiàn)[24],對比泥餅、濾液及凈化回排水的水化因子指標(biāo)表明,固液分離及凈化回排能夠較為有效地降低水體有機(jī)質(zhì)、總磷、總氮等指標(biāo)含量(表1)。
4 結(jié)論與討論
通過池塘養(yǎng)殖底污自動(dòng)清理系統(tǒng)在羅非魚高密度養(yǎng)殖完整周期的應(yīng)用,系統(tǒng)各項(xiàng)功能基本滿足各項(xiàng)需求和技術(shù)設(shè)計(jì)要求。系統(tǒng)變頻控制水車式增氧機(jī)能夠初步實(shí)現(xiàn)殘餌、排泄物等養(yǎng)殖廢棄物的定向沉降,便于廢棄物的抽取轉(zhuǎn)移和固液分離,保證了羅非魚攝食和聚集區(qū)域的水體質(zhì)量穩(wěn)定;系統(tǒng)控制底污抽取及固液分離,能夠及時(shí)轉(zhuǎn)移殘餌、排泄物等沉積物, 對于池塘底泥生態(tài)平衡具有一定作用,濾液凈化回排符合零排放的綠色養(yǎng)殖要求,沉積物的高效轉(zhuǎn)移能夠?yàn)轲B(yǎng)殖生產(chǎn)提供創(chuàng)收手段。
系統(tǒng)應(yīng)用試驗(yàn)的有效開展,在驗(yàn)證系統(tǒng)功能有效性基礎(chǔ)上,在運(yùn)行穩(wěn)定性、便利性和智能化等方面仍然存在一定的改進(jìn)和優(yōu)化空間,以適應(yīng)更加廣泛的養(yǎng)殖模式和生產(chǎn)應(yīng)用場景;通過系統(tǒng)的設(shè)計(jì)、開發(fā)和應(yīng)用,對于池塘殘餌、排泄物沉積規(guī)律進(jìn)行初步總結(jié)并對定向沉降技術(shù)進(jìn)行初步探索,以期通過更多養(yǎng)殖模式、養(yǎng)殖品種的重復(fù)試驗(yàn),總結(jié)更為普適的養(yǎng)殖沉降規(guī)律,為更加智能化的養(yǎng)殖控制提供技術(shù)參考和支持;信息技術(shù)和智能化技術(shù)手段應(yīng)用于水產(chǎn)養(yǎng)殖生產(chǎn)需要進(jìn)行適用化改造和較大規(guī)模的應(yīng)用示范,實(shí)現(xiàn)水產(chǎn)養(yǎng)殖信息化、現(xiàn)代化、智能化,具有廣闊的發(fā)展空間和應(yīng)用前景。
參考文獻(xiàn):
[1]孟順龍,胡庚東,瞿建宏,等. 單養(yǎng)模式下羅非魚親本培育塘的沉積物產(chǎn)污系數(shù)初探[J]. 農(nóng)業(yè)環(huán)境科學(xué)學(xué)報(bào),2010,29(9):1795-1800.
[2]苗衛(wèi)衛(wèi),江 敏.我國水產(chǎn)養(yǎng)殖對環(huán)境的影響及其可持續(xù)發(fā)展[J]. 農(nóng)業(yè)環(huán)境科學(xué)學(xué)報(bào),2007,26(增刊1):319-323.
[3]裘麗萍,李志波,宋 超,等. 羅非魚池塘養(yǎng)殖周期沉積物理化指標(biāo)的變化規(guī)律研究[J]. 中國農(nóng)學(xué)通報(bào),2015,31(29):23-27.
[4]楊正鋒,王 坤. 池塘清淤改造的意義、存在問題及對策[J]. 中國水產(chǎn),2011(6):32-34.
[5]張紅燕,袁永明,馬曉飛,等. 南美白對蝦池塘養(yǎng)殖水質(zhì)智能控制系統(tǒng)設(shè)計(jì)與開發(fā)[J]. 中國農(nóng)學(xué)通報(bào),2020,36(11):130-135.
[6]肖 煒,李大宇,鄒芝英,等. 海南地區(qū)魚蝦混養(yǎng)模式下密度對羅非魚的生長、代謝和免疫的影響[J]. 淡水漁業(yè),2019,49(2):101-106.
[7]陳家捷,譚洪新,于忠利,等. 羅非魚糞便在分解過程中形態(tài)和營養(yǎng)成分變化[J]. 水產(chǎn)科學(xué),2015,34(10):634-639.
[8]史磊磊,范立民,陳家長,等. 不同攝食狀態(tài)羅非魚養(yǎng)殖水體微生物群落功能多樣性初探[J]. 中國農(nóng)學(xué)通報(bào),2018,34(5):147-152.
[9]袁永明,馬曉飛,張紅燕,等. 一種養(yǎng)殖池塘殘餌及糞便自動(dòng)抽取裝置:201610321045.8[P]. 2016-07-27.
[10]陳科慶,郭望淵. 立式板框壓濾機(jī)與廂式壓濾機(jī)脫水機(jī)理對比研究[J]. 中國設(shè)備工程,2019(22):230-232.
[11]沈楠楠,袁永明,馬曉飛. 基于水產(chǎn)物聯(lián)服務(wù)平臺的智能增氧控制系統(tǒng)的開發(fā)[J]. 農(nóng)業(yè)現(xiàn)代化研究,2016,37(5):981-987.
[12]Guo F T,Liu X H.The design of communication protocol for monitoring S7-200 PLC[J]. Journal of Simulation,2015,3(4):3-5.
[13]向曉漢. 西門子S7-200PLC完全精通教程[M]. 北京:化學(xué)工業(yè)出版社,2014.
[14]Mazek K,Chmiel M,Kulisz J.A PC-based operator and diagnostic panel for Simatic S7-200 programmable controllers[J]. Archives of Electrical Engineering,2013,62(2):307-320.
[15]馬 民,陳小慶,劉哲人,等. 嚴(yán)寒地區(qū)穩(wěn)定塘底泥沉積規(guī)律及其影響因素[J]. 武漢城市建設(shè)學(xué)院學(xué)報(bào),1997,14(2):29-33.
[16]Dinn P M,Johannessen S C,MacDonald R W,et al. Effect of receiving environment on the transport and fate of polybrominated diphenyl ethers near two submarine municipal outfalls[J]. Environmental Toxicology and Chemistry,2012,31(3):566-573.
[17]Hunt C D,Mansfield A D,Mickelson M J,et al. Plume tracking and dilution of effluent from the Boston sewage outfall[J]. Marine Environmental Research,2010,70(2):150-161.
[18]李 勇,張振廷,花劍嵐,等. 排污流速比對河流水體中懸浮物沉降和底泥再懸浮的影響[J]. 河海大學(xué)學(xué)報(bào)(自然科學(xué)版),2015,43(3):189-196.
[19]劉 偉,文 華,蔣 明,等. 吉富羅非魚成魚對8種常見植物源飼料原料的表觀消化率[J]. 西北農(nóng)林科技大學(xué)學(xué)報(bào)(自然科學(xué)版),2015,43(4):17-25.
[20]郭延莉. 基于水產(chǎn)養(yǎng)殖池塘底質(zhì)的改良完善措施[J]. 黑龍江水利科技,2012,40(8):72-73.
[21]詹銳生. 高壓壓濾脫水固結(jié)一體化處理河道淤泥的技術(shù)應(yīng)用研究[D]. 廣州:華南理工大學(xué),2019:3-10.
[22]楊柳燕,趙興青,肖 琳,等. 沉積物總氮、總磷聯(lián)合測定分析方法:CN1869656A[P]. 2006-11-29.
[23]Heiri O,Lotter A F,Lemcke G. Loss on ignition as a method for estimating organic and carbonate content in sediments:reproducibility and comparability of results[J]. Journal of Paleolimnology,2001,25(1):101-110.
[24]中國標(biāo)準(zhǔn)出版社第二編輯室.環(huán)境監(jiān)測方法標(biāo)準(zhǔn)匯編:水環(huán)境[M]. 2版.北京:中國標(biāo)準(zhǔn)出版社,2010.
猜你喜歡
電子技術(shù)與軟件工程(2016年23期)2017-03-06 21:23:45
科技創(chuàng)新與應(yīng)用(2017年3期)2017-02-18 16:54:12
考試周刊(2017年6期)2017-02-13 10:12:55
企業(yè)技術(shù)開發(fā)·下旬刊(2016年11期)2016-12-27 10:26:50
電子技術(shù)與軟件工程(2016年22期)2016-12-26 21:36:26
中國科技博覽(2016年18期)2016-10-19 06:57:16
科技視界(2016年14期)2016-06-08 19:01:12
科技視界(2016年11期)2016-05-23 11:08:57
中國科技博覽(2016年14期)2016-04-25 01:47:51
電腦知識與技術(shù)(2016年4期)2016-04-11 15:28:35