戰術導彈控制系統BIT設計方法
2022-02-16 10:54:26劉仁浩段宇婷姜云濤夏金秀
計算機測量與控制 2022年1期
劉仁浩,李 然,段宇婷,姜云濤,夏金秀
(1.北京航天自動控制研究所,北京 100854; 2.航天科工空間系統總體部,北京 100854)
0 引言
在戰術導彈研制和使用過程中,除了保證系統飛行過程各環節的高可靠性外,還必須保證導彈在發射前功能正常、性能良好,保證安全、準時發射,需要導彈控制系統具有良好的測試性[1]。當前部隊每裝備一型導彈,就需要配套相應的地面輔助測試設備,需要在技術陣地通過單機單元測試、分系統測試和總檢查測試等一系列測試工作來判斷導彈控制系統的健康狀態。在發射陣地還需進行大量射前檢查以確保任務可靠性,存在測試程序時間長,工序冗繁,部隊勤務工作量大,保障成本高等諸多問題,嚴重制約導彈武器系統快速反應能力的提升[2]。能否及時檢測和隔離故障,保證導彈安全、準時發射將直接影響導彈武器裝備的效能,機內測試(Built-In Test,BIT)是解決此類問題的有效途徑,還是實現系統故障容錯、重構的基礎[3-9]。BIT是指系統、設備內部提供的檢測、隔離故障的自動測試能力,是聯機檢測技術的新發展[10]。
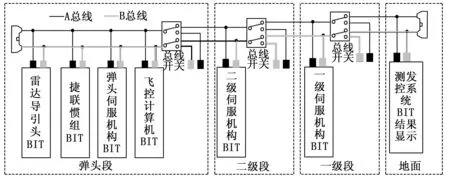
圖2 兩級常規戰術導彈控制系統組成框圖
新一代導彈控制系統大量采用集成電路、微處理器技術以及總線通信技術,為實現BIT設計奠定了堅實的基礎。根據新一代導彈控制系統設計特點,在少量增加甚至不增加彈上設備資源開銷的前提下,提出一種分布式與集中式相結合的BIT測試方法,該測試方案僅利用導彈控制系統彈上已有資源,在無外部設備輔助測試的條件下覆蓋控制系統所有硬件資源,實現對控制系統工作狀態和工作性能的評估,發現并定位故障,輔助決策導彈是否可以投入戰備和作戰使用。
1 BIT功能、組成及基本原理
BIT技術是依靠其內部專設的自檢測電路和自檢測軟件,來完成系統自身工作參數檢測、故障診斷與隔離的一種綜合能力,BIT系統結構如圖1所示[11-13]。
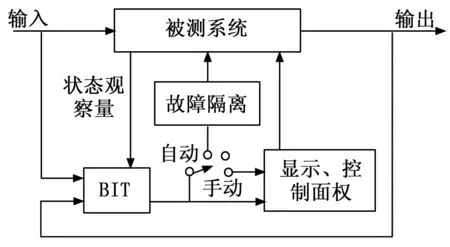
圖1 BIT系統結構圖
BIT結構從總體上可分為分布式和集中式兩種結構。分布式BIT結構是指分系統或設備設計有各自的故障檢測和隔離功能,并根據其測試結果,利用歸納法來判斷系統是否正常;集中式BIT重點針對分布式BIT不覆蓋項,由系統中央處理器收集各狀態信息,并利用系統級測試與診斷功能判斷系統是否處于正常狀態[14-15]。根據系統特點和使用模式,BIT使用模式又可分為加電BIT、啟動BIT、周期BIT和連續BIT[16]。加電BIT主要在系統執行任務前快速檢測裝備是否正常,能否投入正常使用,給出通過或不通過的指示。啟動BIT用于執行專項測試,主要用于檢測系統關鍵功能特性和隔離系統級故障。周期BIT和連續BIT是在系統執行任務過程中連續地或周期性地監測裝備各組成部分的工作狀況,特別是對影響安全和任務關鍵的部件,主要用于系統故障隔離和系統工作性能評估。
2 控制系統組成及BIT總體方案
以常規兩級戰術導彈為例,控制系統主要由飛控計算機、捷聯慣性測量組合、雷達導引頭、控制電池以及各級段伺服機構和總線電纜網等組成組成,如圖2所示。
各單機均按功能采用模塊化設計,內部集成的微處理器為分布式BIT設計提供了軟硬件資源。各單機通過彈上總線實現互聯互通,其中飛控計算機既是飛行控制中心,也是系統測試控制中心,便于集中式BIT設計。據此將控制系統BIT基本結構分為針對各單機檢測的分布式BIT和以飛控計算機為中心對系統進行綜合診斷的集中式BIT兩個層級。
基于控制系統分布式和集中式BIT架構,導彈交付用戶后的測試可分為技術陣地測試和發射陣地測試兩大階段,技術陣地測試要求在動態激勵下對控制系統功能、技術參數、工作程序、動作協調性進行綜合檢查確認。為使導彈經常處于良好戰備可用狀態,需要在技術陣地對導彈進行定期的、不定期的或預防性的測試,只有技術陣地測試合格的導彈才轉入發射陣地。發射陣地測試只對系統重要單機功能進行檢查,要求測試快速、連續、自動,測試項目作為發控流程的一部分。仍以常規兩級戰術導彈為例,針對上述典型使用階段測試需求,采用分布式與集中式相結合的BIT測試架構,控制系統BIT模式及工作原理如表1所示。
導彈使用階段控制系統BIT工作流程如圖3所示,導彈交付入庫后,在原位按需求進行開機自檢和功能測試,測試過程中監測單機和系統功能參數,以確認導彈狀態,對需要維修的導彈則轉入維修程序。BIT項目可根據需要單選或多選,測試開關的接通與斷開可通過測發控軟件界面選擇。當接到發射任務后,導彈機動至發射陣地,起豎前進行開機自檢,自檢流程融入發射流程,如發現故障則轉入維修程序。導彈點火起飛后啟動單機及系統功能參數監測BIT,經遙測實時記錄并下傳,用于導彈性能評估。
在技術陣地原位運行開機自檢和系統功能測試,測試過程中對單機和系統的功能參數進行了監測,測試過程可在無外部測試設備輔助條件下覆蓋控制系統所有硬件資源,實現對導彈工作狀態和工作性能的評估,發現并定位故障,決策導彈是否可以投入戰備和作戰使用。
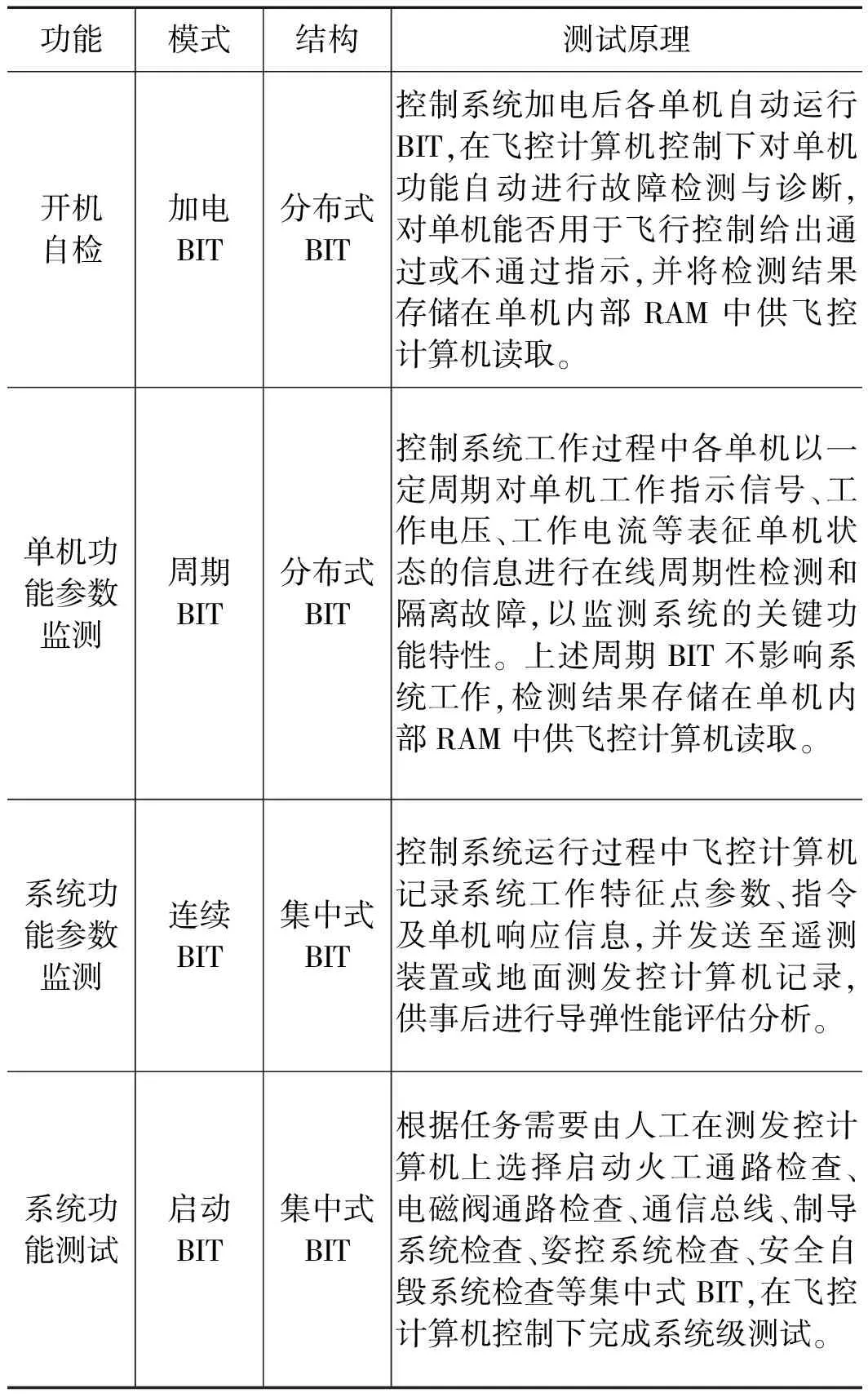
表1 導彈控制系統BIT模式及工作原理
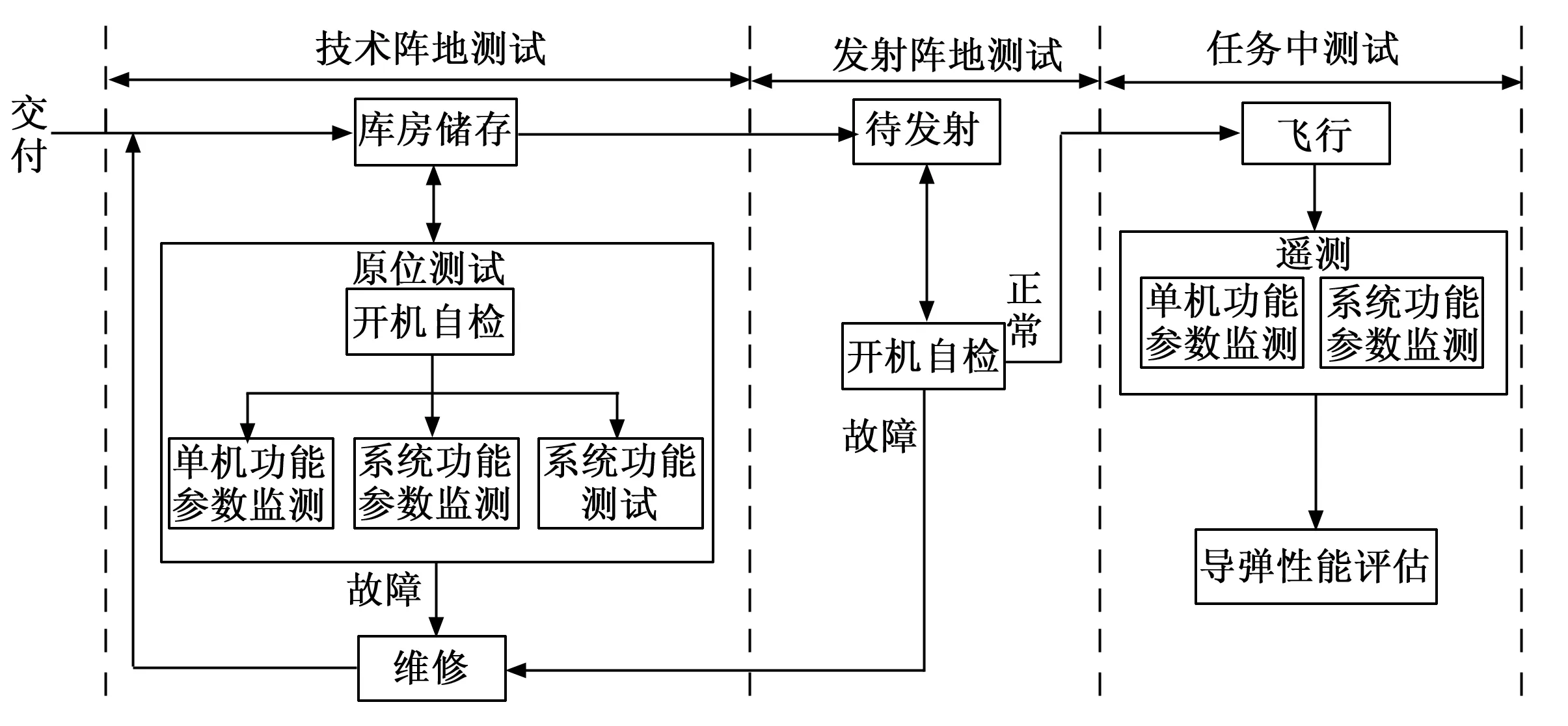
圖3 戰術導彈使用階段控制系統BIT工作流程
3 控制系統BIT設計方法
3.1 控制系統單機分布式BIT設計
控制系統各單機主要由功能部件和信號處理與控制電路兩大部分組成,其中各單機信號處理與控制電路技術路線類似,主要由各類DSP、FPGA、A/D采樣電路、D/A轉換電路、總線數據通信接口模塊和電源模塊等組成,BIT設計時通常根據各模塊特點進行故障建模得出故障樹,根據故障樹設計針對性的BIT檢測算法[17]。根據控制系統單機設計特點,對于此類電路采用下述方法實現BIT測試。
1)自閉環測試:利用各功能模塊內DSP、FPGA等數字器件運算控制資源,在電路內部設置握手及狀態查詢程序自檢和互檢程序,完成數字信號處理電路的自閉環測試。
2)模擬電路回繞測試:在電路中設置電子開關或繼電器等支持電路,采用信號回繞方式實現D/A輸出與A/D采樣電路互檢,同時完成電源模塊輸出特性檢測。
3)工作狀態在線監測:利用信號處理電路信息采集通道對單機工作指示信號、工作電壓、電流等表征單機工作狀態的信息進行在線周期性監測。對于雷達導引頭、捷聯慣性測量組合和伺服機構等單機的功能部組件,可結合單機具體功能利用單機或自然環境提供的測試激勵實現BIT測試。
3.1.1 雷達導引頭BIT
雷達導引頭普遍采用數字陣列體制,主要由天線單元、綜合射頻單元和信號處理單元組成,如圖4所示。
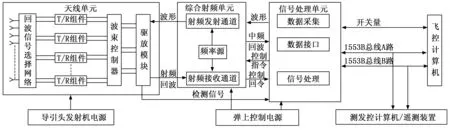
圖4 雷達導引頭系統BIT組成框圖
雷達導引頭BIT測試的核心是發射和接收通道測試,利用雷達導引頭自身工作特點對雷達T/R組件進行輪替測試,一次測試只開一個T/R組件的發射通道,發射信號經回波信號選擇網絡分配到其余T/R組件的接收支路,獲取每個接收信號的幅度值和相位值參數,按此方式對雷達全部T/R組件進行遍歷測試后即可判定發射通道和接收通道是否正常,同時可達到對雷達導引頭天線單元、綜合射頻單元和信號處理單元進行功能檢測的目的。
3.1.2 捷聯慣性測量組合BIT
捷聯慣性測量組合主要由3只加速度計、3只陀螺、I/F電路板、陀螺控制電路、數據采集處理電路以及框架控制及測角電路組成,如圖5所示。
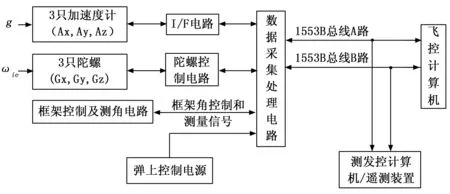
圖5 捷聯慣性測量組合BIT組成框圖
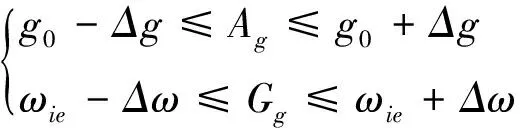
靜基座環境下利用當地重力加速度g0和地球自轉角速度ωie(取15.04°/h)為激勵,獲取慣組陀螺和加速度計在一定時間ΔT內輸出值,建立下述關系式:
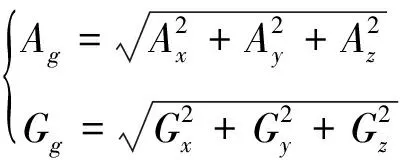
(1)
(2)
Ai=x,y,z、Gi=x,y,z分別是慣組x,y,z三軸捷聯加速度計和陀螺在ΔT內的輸出均值,Δg、Δω分別是加速度通道和角速率通道合格門限值。此外,對于三自慣組可通過轉動其內部框架獲得姿態激勵,對Ai=x,y,z和Gi=x,y,z輸出極性進行測試,依據上述方法可判斷捷聯慣性測量組合功能是否正常可用。
3.1.3 伺服機構BIT
伺服機構由伺服控制器和機電作動器組成,BIT原理如圖6所示。
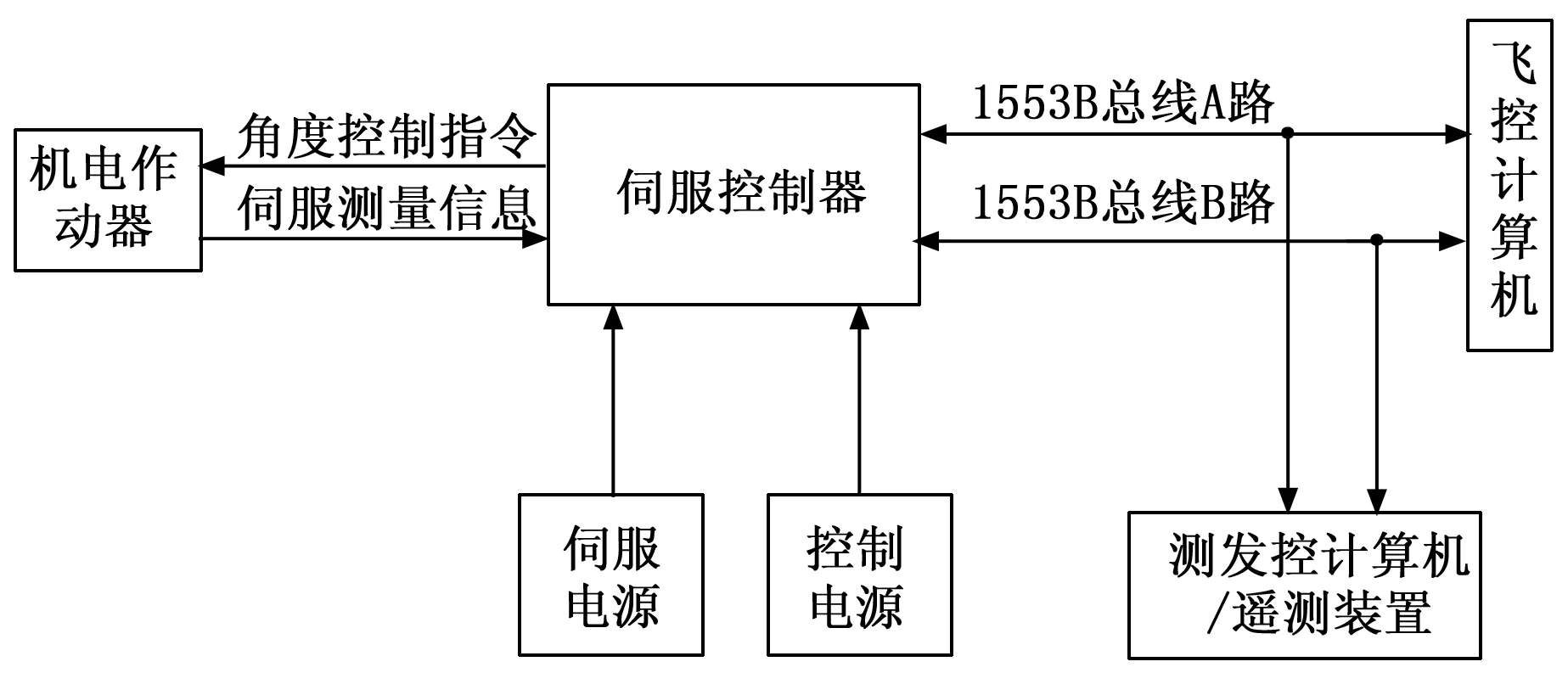
圖6 伺服機構BIT組成框圖
伺服控制器根據飛控計算機發出的角度指令驅動機電作動器動作,使得導彈氣動舵面或發動機噴管按給定的角度偏轉。根據這一特點,在空間給定一個特定位置,伺服控制器運行自測試程序驅動電機轉動舵偏向該位置,判斷測量角位置與設計角度之差是否符合設計判斷門限,據此判斷伺服機構工作狀態是否正常。
3.2 控制系統集中式BIT設計
控制系統火工品控制通路、電磁閥控制通路、通信總線等設備未嵌入微處理器,不具備單機自檢測功能,制導系統、姿態控制以及安全自毀系統功能等無法通過單機BIT測試覆蓋,需要由系統飛控計算機來收集各狀態信息,利用系統級測試與診斷功能判斷系統是否處于正常狀態。
1)火工品通路測試:以n路火工品H1、H2……Hn為例,測試電路如圖7所示。測試激勵恒流源、測控開關KA1、KA2均設置在飛控計算機BIT專用測試模塊內,K1……Kn為彈上火工品時序控制開關,上述開關均受飛控計算機控制。
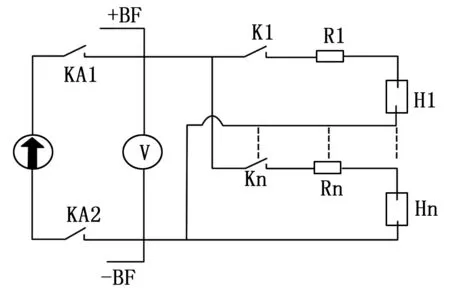
圖7 火工品通路BIT組成框圖
測試時,KA1、KA2先閉合,再依次閉合K1……Kn,飛控計算機A/D采樣電路實時記錄+BF、-BF母線間的電壓,恒流源輸出電流I遠小于火工品安全電流,據此可測量計算得到各通道限流電阻Rn、火工品阻值和線纜電阻的控制回路總阻值,根據回路總阻值可判斷火工品是否連接好,確保無漏接。此外,通過比較分析時序控制開關閉合前后回路總阻值變化情況辨識火工品時序通路有無誤接通,避免±BF母線上電后發生時序誤啟動等安全隱患。
2)電磁閥控制通路測試:以n路電磁閥DC1、DC2……DCn為例,對電磁閥控制通路的BIT測試實現方式與火工品通路測試類似,測試電路如圖8所示,所不同的是依據電磁閥特性選用了恒壓源作為測試激勵,恒壓源、測控開關KV1、KV2和取樣電阻R0串聯在電磁閥控制回路中。
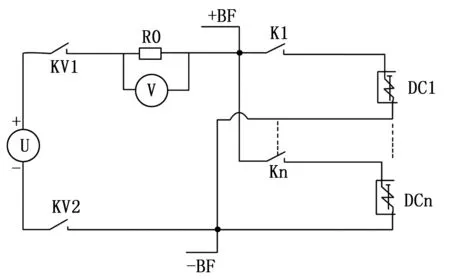
圖8 電磁閥通路BIT組成框圖
測試時,KV1、KV2先閉合,再依次閉合K1……Kn,飛控計算機A/D采樣電路實時記錄取樣電阻R0兩端的電壓,從而獲得電磁閥接通過程電流變化趨勢,以此分析判斷電磁閥是否工作,同時對電磁閥控制通道的連接狀態進行實時測試。
圖9 制導系統BIT組成框圖
3)通信總線測試:以兩級導彈為例,全彈使用A、B兩路1553B總線通信,全彈有彈地、一二級和頭體3個分離面,每個分離面均設置了總線切換開關。導彈飛行過程中,在各級段分離前控制相應分離面總線開關完成1553B總線由接通下一級狀態切換至接通本級匹配電阻,實現控制總線轉級。為實現總線通信功能和轉級功能測試,在飛控計算機中設置測試程序,分別通過A、B兩路總線逐個檢測總線上各站點的自檢結果,以此測試總線通信功能。再順序切換各轉級總線開關,通過地面測發控顯控計算機監聽總線數據判斷總線開關切換功能是否正常。
4)制導系統測試:飛控計算機測試程序根據標準彈道向制導模塊發送模擬飛行環境的加速度、角速度和末制導探測信息,飛控計算機執行飛行程序,測發控系統計算機通過總線監聽和記錄伺服控制指令、時序控制指令和遙測數據,以驗證制導系統正確性。
5)姿控系統測試:姿控系統測試是檢查姿態控制系統的靜、動態參數是否符合規定的技術要求,通路極性是否正確,測試原理如圖10所示。
圖10 姿態控制系統BIT組成框圖
靜、動態特性測試是指對姿態敏感裝置和校正網絡增益控制環節的靜態和動態性能測試,通路極性測試的目的是檢查姿態控制系統各組成儀器之間的通路和極性是否正常,把系統隱性故障充分激發出來,以在短時間內確認系統控制功能的正確性[18-19]。校正網絡增益控制環節主要由算法軟件實現,其性能由設計狀態確定,導彈交付后可免測試,系統重點考慮通路極性BIT設計。測試時控制慣組內臺體轉動,給出姿態角和姿態角速度信號,測發控計算機記錄伺服機構控制指令和舵或噴管擺動位置,以此判斷偏航、俯仰和滾動三個通道的極性是否正常。
6)安全自毀功能測試:與系統極性測試類似,控制慣組內臺體轉動,先后模擬彈體的偏航角和俯仰角超過允許的角度范圍,測發控計算機記錄飛控計算機發出的自毀指令,以此判斷偏航、俯仰通道的安全自毀是否正常。
4 結束語
導彈控制系統BIT設計是系統頂層設計,其主要設計內容主要包括單機級分布式BIT設計和系統級集中式BIT設計兩個層次。根據導彈控制系統特點,給出了控制系統中主要單機和系統的BIT設計方法及工程實施方案,在不使用地面輔助測試設備的前提下,以最小的硬件軟件開銷實現了BIT自測試,實現了導彈技術準備測試和射前檢查的自測試功能,可有效提高部隊的生存能力和機動作戰能力,為導彈或運載火箭控制系統測試性、維修性、保障性以及故障容錯與重構設計提供技術參考。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
中國科技論壇(2017年7期)2017-07-25 08:49:53
Coco薇(2017年5期)2017-06-05 08:53:16
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55