GNSS接收機原始觀測值精度測試與分析
2022-02-17 23:59:38任永超張緒豐
導航定位學報 2022年1期
陳 澍,任永超,張緒豐,牛 犇
GNSS接收機原始觀測值精度測試與分析
陳 澍1,任永超1,張緒豐2,牛 犇1
(1.國家光電測距儀檢測中心,北京 100039;2. 中鐵工程設計咨詢集團有限公司,北京 100055)
針對隨著全球衛(wèi)星導航系統(tǒng)(GNSS)與多種傳感器的融合使用,人們對GNSS接收機原始觀測值精度指標的評估需求快速增長的問題。提出分別采用零基線雙差法、零基線三差法對GNSS接收機的偽距觀測值精度、載波相位觀測值精度進行測試。詳細推導了原始觀測值精度的測量原理,對4種型號各10臺接收機的測試結果進行了統(tǒng)計分析,考察的系統(tǒng)和頻點包括全球定位系統(tǒng)(GPS)L1C/A、L2、L5,伽利略衛(wèi)星導航系統(tǒng)(Galileo)E1、E5a、E5b,北斗衛(wèi)星導航系統(tǒng)(BDS)B1I、B2I、B3I、B1C、B2a。統(tǒng)計結果表明,采用零基線雙差法、零基線三差法可以有效地反映接收機的原始觀測值質量情況。
偽距觀測值精度;載波相位觀測值精度;零基線雙差法;零基線三差法
0 引言
在全球衛(wèi)星導航系統(tǒng)(global navigation satellite system,GNSS)接收機常規(guī)測試中,主要考察的技術指標有接收機內部噪聲水平[1]、靜態(tài)測量精度、動態(tài)測量精度等,這些指標的設定是從用戶最關心的定位結果角度出發(fā)的。但是隨著GNSS應用領域的不斷擴大,GNSS與慣導系統(tǒng)、遙感、數(shù)字化、人工智能的結合越加緊密,GNSS接收機原始觀測值精度指標的重要性越加凸顯[2-4],對其進行科學評估的需求也更為迫切。文獻[5]通過零基線單差法和超短基線單差法對北斗衛(wèi)星導航系統(tǒng)(BeiDou navigation satellite system, BDS)三類導航衛(wèi)星的碼和相位觀測值精度進行了評估,并與全球定位系統(tǒng)(global positioning system, GPS)進行了比較分析。文獻[6]采用非差、單差、雙差的偽距相位差值組合和多路徑組合觀測值,分析了BDS B1和BDS B2頻率上的觀測噪聲,并與GPS結果進行了對比。文獻[7]采用偽距相位幾何無關模型,通過零基線單測站、單差、雙差及歷元差,分析了BDS衛(wèi)星信號測距精度。文獻[8]測試分析了偽距固定法、模擬器雙差法、零基線雙差法和偽距減載波相位法等測量方法的原始觀測量精度。
本文借鑒文獻[9]的相關內容,采用零基線雙差法和零基線三差法,對4個型號各10臺接收機進行了偽距和載波相位觀測值精度測試,并對測試結果進行了統(tǒng)計分析。
1 觀測值精度測試原理
1.1 觀測模型
在衛(wèi)星位置已知的條件下,只需測量接收機至衛(wèi)星的距離,即可解算出接收機的位置。但是從衛(wèi)星發(fā)射導航信號,經過大氣層,到接收機接收處理的這一過程,不可避免地引入了各種誤差。例如與衛(wèi)星有關的星歷誤差、衛(wèi)星鐘差;在信號空間傳播階段受大氣和地面環(huán)境影響,產生的電離層延遲誤差、對流層延遲誤差、多路徑效應;以及與接收機相關的內部噪聲等。這些誤差都對觀測值造成了一定的影響,從而影響到用戶位置的確定[10]。綜合考慮各種誤差影響,建立偽距和載波相位觀測方程為



1.2 偽距觀測值精度
零基線雙差法通過功分器將同一天線接收的信號分成功率、相位相同的兩路,提供給同一型號的兩臺接收機,通過基于零基線的雙差,可消除衛(wèi)星鐘差、接收機鐘差、電離層延遲誤差、對流層延遲誤差以及多路徑效應,得到偽距觀測值雙差殘差,從而得到偽距觀測值精度結果,具體測量原理如下:


然后進行星間雙差,以任意一顆衛(wèi)星作為基準星,其他衛(wèi)星的偽距單差觀測值與基準星作差,可以消除接收機鐘差影響,則偽距雙差觀測值可表示為

因為偽距雙差觀測值(也可稱為偽距觀測值雙差殘差)服從零均值高斯分布,則通過某頻點所有歷元的偽距雙差觀測值,可獲得其偽距雙差觀測值精度為

1.3 載波相位觀測值精度

再進行星間雙差,以任意一顆衛(wèi)星作為基準星,其他衛(wèi)星的載波相位單差觀測值與基準星作差,則載波相位雙差觀測值可表示為

可以看到,載波相位雙差觀測值中含有整周模糊度,對于整周模糊度的處理通常有兩種方法:一是進行整周模糊度的固定,再從雙差觀測值中去掉整周模糊度的影響;二是進行三差處理,當接收機持續(xù)鎖定衛(wèi)星信號時,雙差整周模糊度會保持不變,所以通過歷元間作差可抵消雙差整周模糊度的影響[11]。
[9]的測試方法,考慮到整周模糊度固定的處理較為復雜,為了簡化測試,本文采用零基線三差法,則載波相位三差觀測值可表示為

則某頻點的載波相位三差觀測值精度為
2 實驗結果與分析
對A型號、B型號、C型號、D型號4種型號的GNSS接收機進行了實際衛(wèi)星信號下的靜態(tài)零基線測量,每個型號各測試10臺接收機,設置衛(wèi)星截止高度角10°,采樣間隔30 s,觀測12 h。接收的衛(wèi)星導航系統(tǒng)包括GPS、BDS、伽利略衛(wèi)星導航系統(tǒng)(Galileo navigation satellite system, Galileo),接收頻點分別為GPS L1C/A、L2、L5,Galileo E1、E5a、E5b,BDS B1I、B2I、B3I、B1C、B2a。因為格洛納斯衛(wèi)星導航系統(tǒng)(global navigation satellite system, GLONASS)M衛(wèi)星采用頻分多址的方式,在雙差觀測方程中無法消除接收機時鐘相對偏差的影響[12],計算的偽距觀測值精度并不理想。
2.1 偽距觀測值精度測試結果分析
分別統(tǒng)計了A型號、B型號、C型號、D型號4種型號接收機各頻點偽距觀測值精度的算數(shù)平均值和標準差其結果如表1、圖1、圖2所示。由表1、圖1、圖2可見,偽距觀測值精度的算術平均值均小于12 cm。B型號、C型號的偽距觀測值精度最優(yōu),D型號次之,A型號最差。
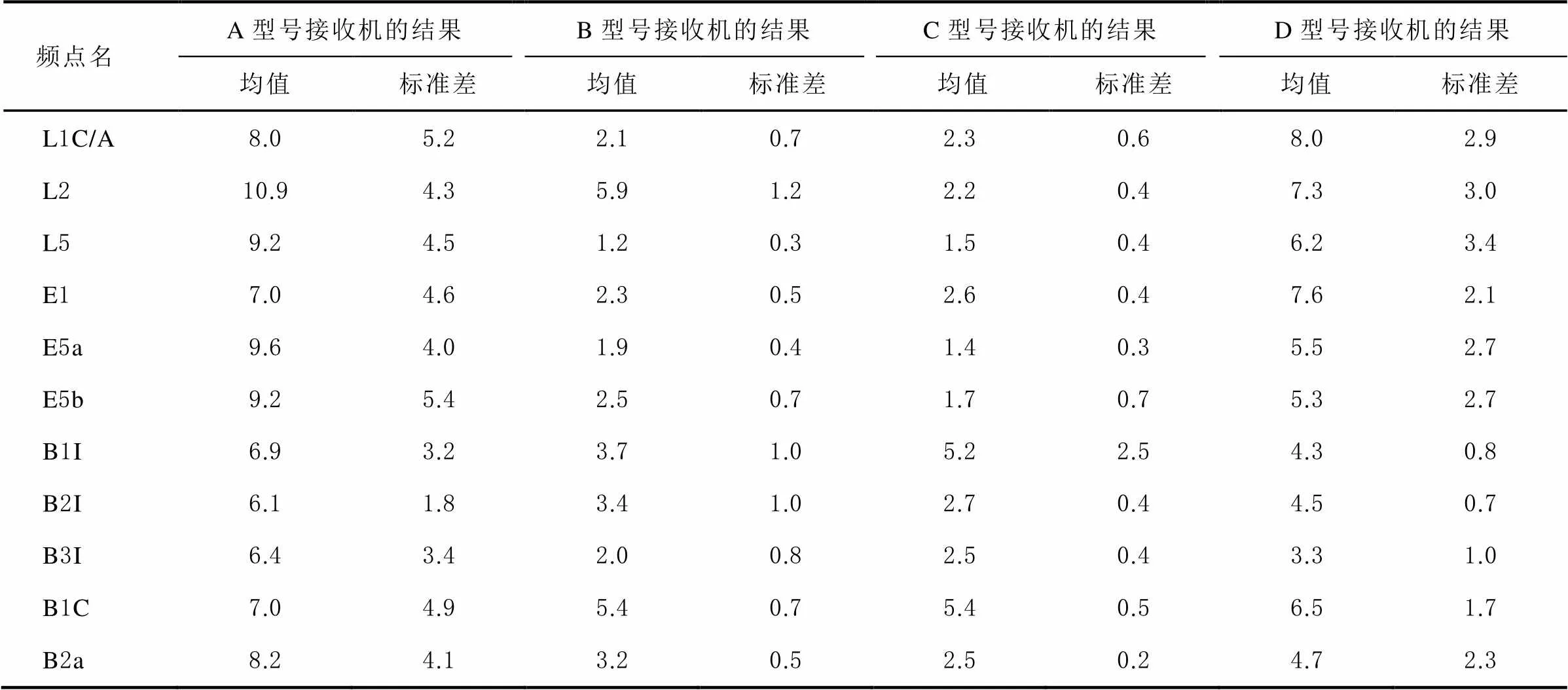
表1 偽距觀測值精度統(tǒng)計表 單位:cm
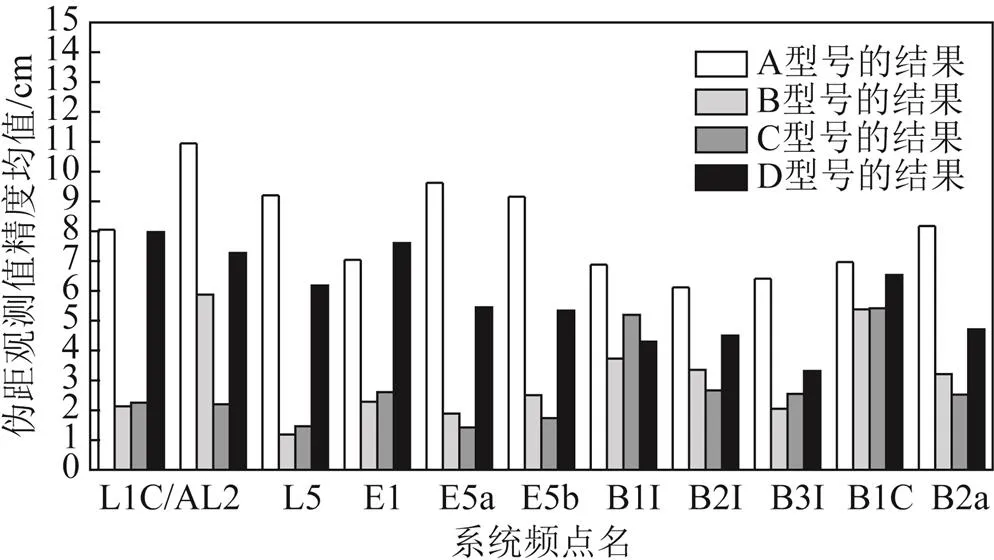
圖1 四種型號接收機各頻點偽距觀測值精度的算數(shù)平均值
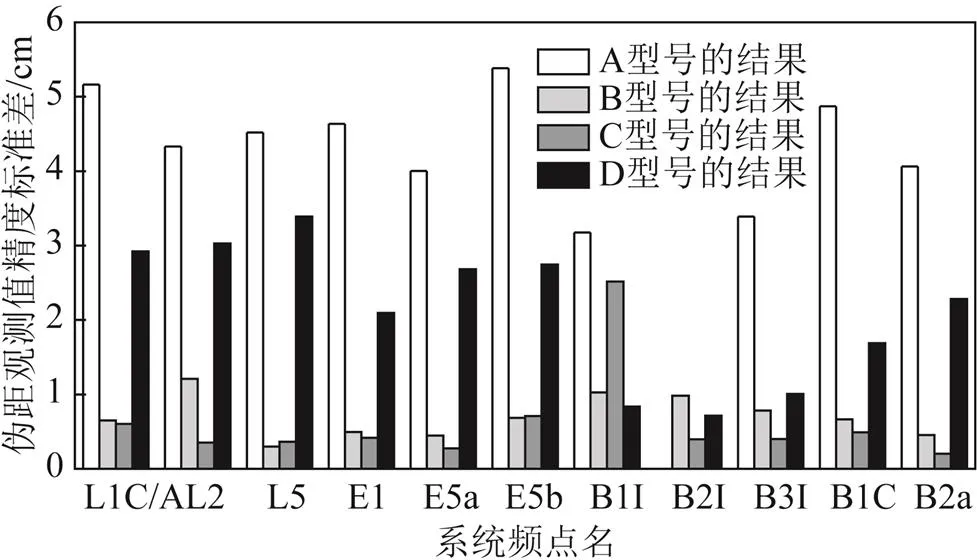
圖2 四種型號接收機各頻點偽距觀測值精度的標準差
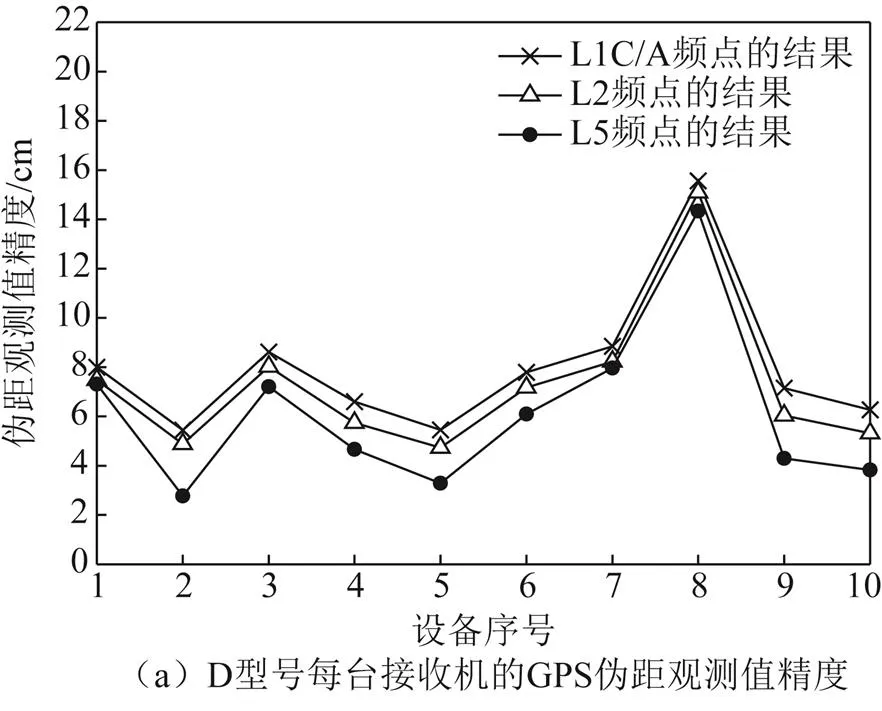
圖3至圖6分別為A型號、B型號、C型號、D型號4種型號每臺接收機的偽距觀測值精度情況。同型號接收機GPS、Galileo、BDS三系統(tǒng)的圖形趨勢一致,反映了接收機在偽距觀測值精度上的個體差異。從各導航系統(tǒng)上看,GPS L5的偽距觀測值精度較好,L2較差;Galileo各頻點偽距觀測值精度差異較小;BDS B3I的偽距觀測值精度較好,B1C較差。
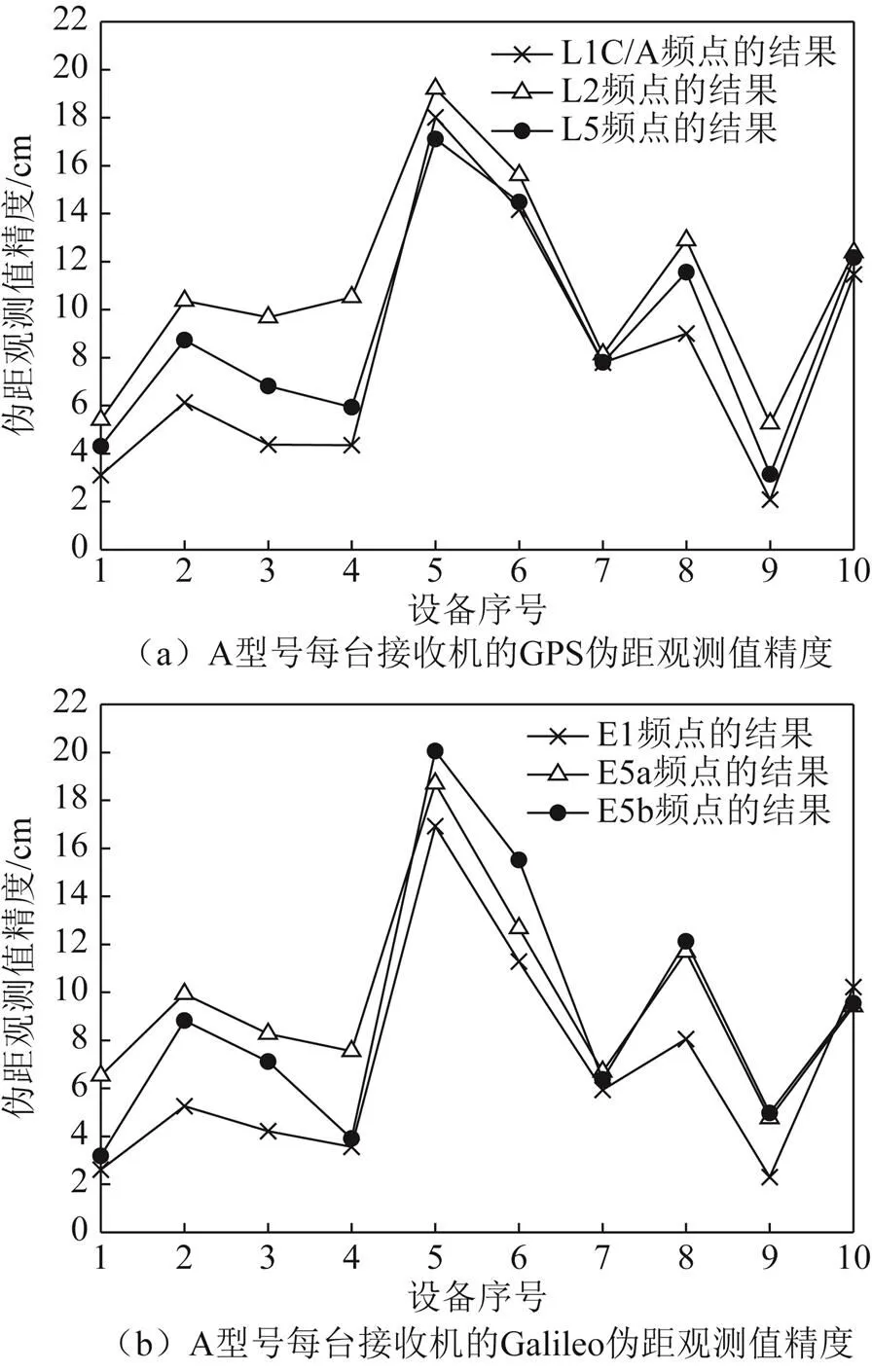
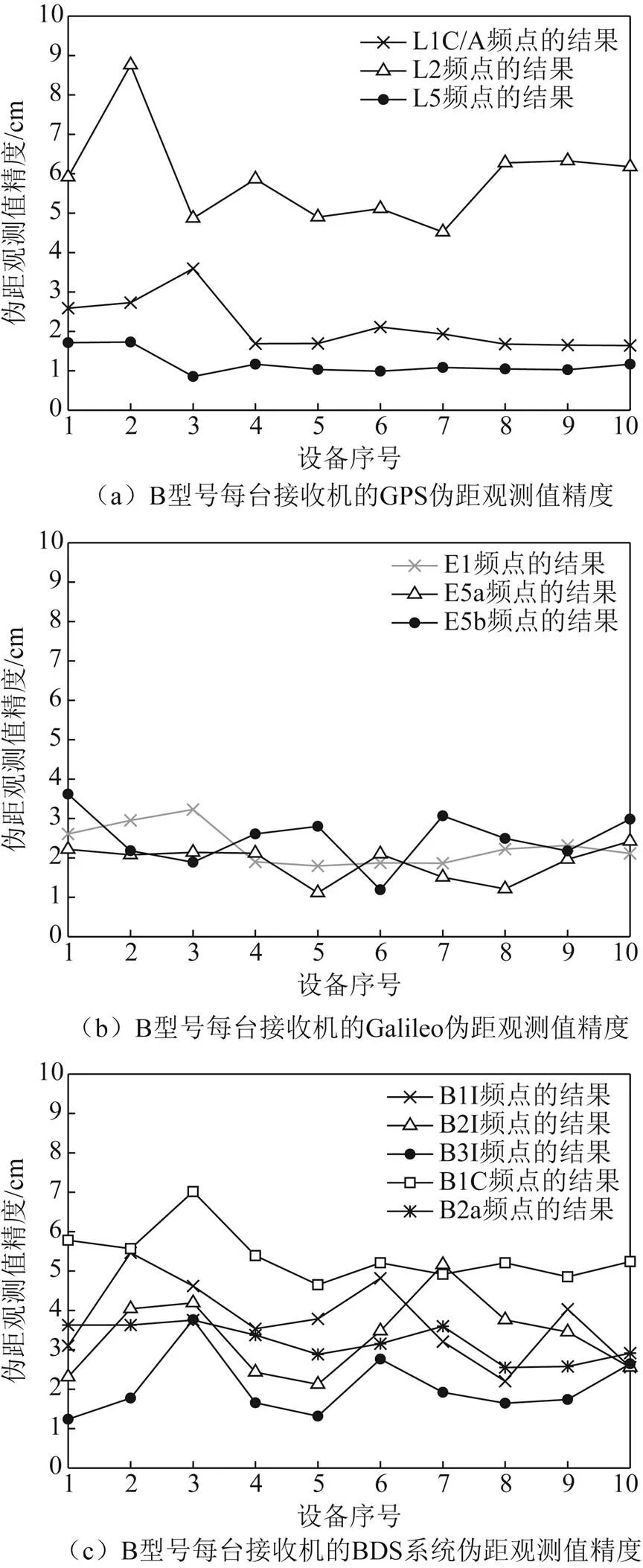
圖4 B型號每臺接收機的GPS/Galileo/BDS偽距觀測值精度
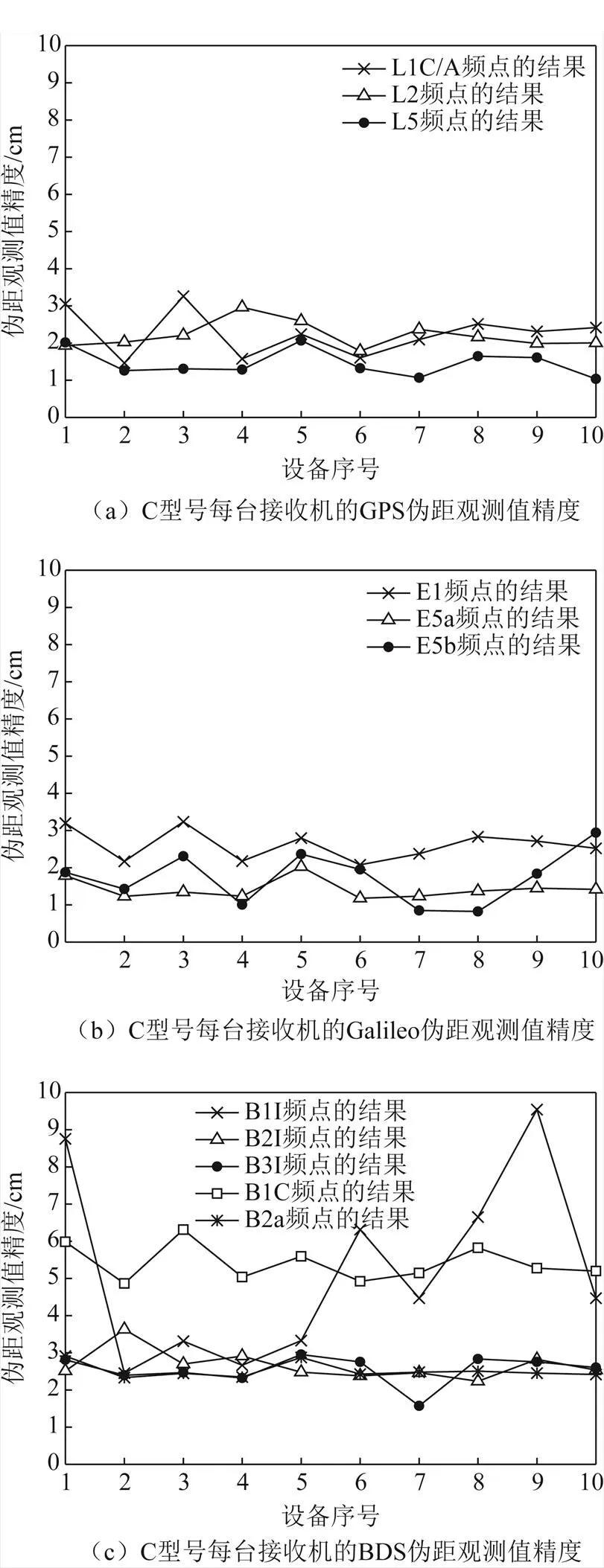
圖5 C型號每臺接收機的GPS/Galileo/BDS偽距觀測值精度
2.2 載波相位觀測值精度測試結果分析
分別統(tǒng)計了A型號、B型號、C型號、D型號4種型號接收機各頻點載波相位觀測值精度的算數(shù)平均值和標準差,其結果如表2、圖7至圖9所示。由表2、圖7、圖8可見,載波相位觀測值精度的算術平均值均小于1.5 mm。A型號接收機在L2頻點的均值遠大于其他型號和頻點,如圖7、圖9所示。除A型號L2頻點外,各頻點的算術平均值均小于1.0 mm。
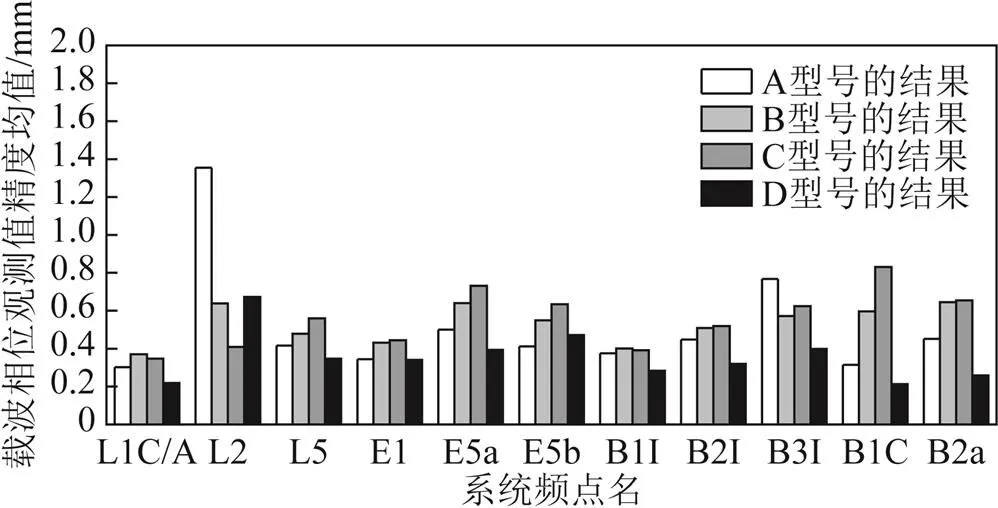
圖7 四種型號接收機各頻點載波相位觀測值精度的算數(shù)平均值
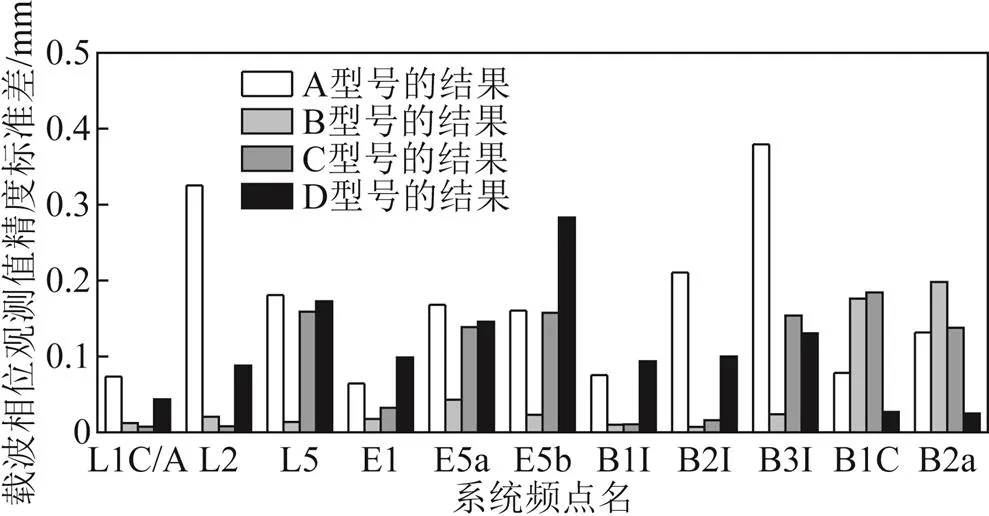
圖8 四種型號接收機各頻點載波相位觀測值精度的標準差

圖9 A型號每臺接收機的GPS載波相位觀測值精度
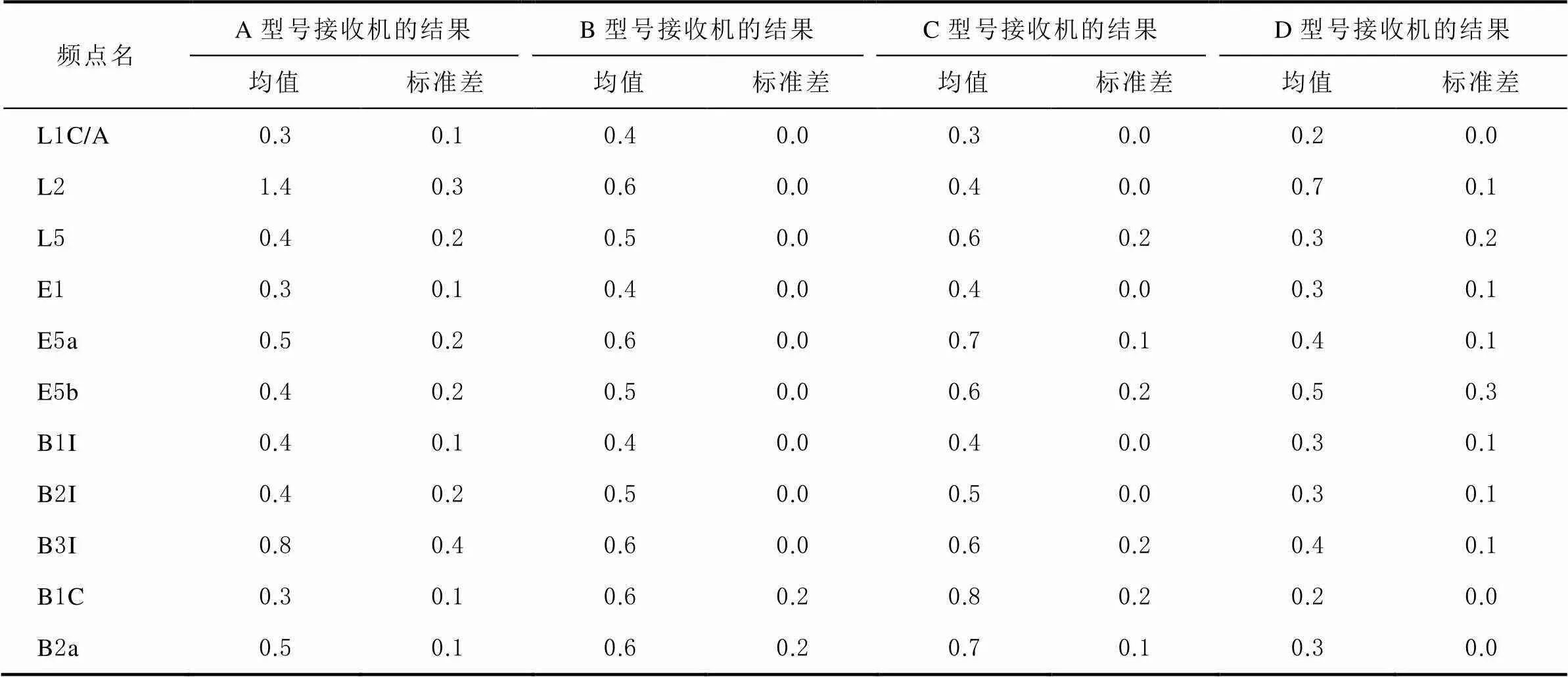
表2 載波相位觀測值精度統(tǒng)計表 單位:mm
3 結束語
本文介紹了零基線雙差法、零基線三差法評估原始觀測值精度的測量原理。基于零基線的雙差,消除了衛(wèi)星鐘差、接收機鐘差、對流層延遲誤差以及多路徑效應的影響,得到偽距雙差殘差,從而得到偽距觀測值精度結果。通過歷元間作差,可抵消雙差整周模糊度的影響,得到載波相位三差殘差,從而獲得載波相位觀測值精度結果。
通過實測4種型號各10臺接收機的靜態(tài)零基線數(shù)據(jù),得到了每臺接收機各頻點的偽距和載波相位觀測值精度。經過統(tǒng)計分析,GPS L5的偽距觀測值精度較好,L2較差;Galileo各頻點偽距觀測值精度差異較小;BDS B3I的偽距觀測值精度較好,B1C較差;4種型號接收機各頻點的偽距觀測值精度的算術平均值小于12 cm,載波相位觀測值精度的算術平均值小于1.5 mm。采用零基線雙差法、零基線三差法可以有效地反映接收機的原始觀測值質量情況。
參考文獻
[1] 張銳, 蔡艷輝, 翟清斌. 現(xiàn)代GNSS接收機內部噪聲水平評定[J]. 中國計量, 2010(12): 97-99.
[2] 劉琳, 席瑞杰. GPS/GLONASS/BDS/Galileo系統(tǒng)載波相位觀測值質量對比分析[J]. 全球定位系統(tǒng), 2019, 44(1): 16-22.
[3] 陳波, 高成發(fā), 劉永勝, 等. 安卓手機終端原始GNSS觀測數(shù)據(jù)質量分析[J]. 導航定位學報, 2019, 7(3): 87-95.
[4] 劉萬科, 史翔, 朱鋒, 等. 谷歌Nexus 9智能終端原始GNSS觀測值的質量分析[J]. 武漢大學學報(信息科學版), 2019, 44(12): 1749-1756.
[5] YANG Yuanxi, LI JinLong, WANG Aibing, et al. Preliminary assessment of the navigation and positioning performance of BeiDou regional navigation satellite system[J]. Science China: Earth Sciences, 2014, 57(1): 144-152.
[6] 程鵬飛, 李瑋, 秘金鐘. 北斗導航衛(wèi)星系統(tǒng)測距信號的精度分析[J]. 測繪學報, 2012, 41(5): 690-708.
[7] 趙小平, 劉文龍, 曹新運. 零基線分析北斗信號測距精度[J]. 測繪科學, 2014, 39(11): 25-61.
[8] 笪騰飛, 范桂峰, 崔曉偉, 等. GNSS接收機原始觀測量精度測量方法研究[C]//中國衛(wèi)星導航系統(tǒng)管理辦公室學術交流中心. 第九屆中國衛(wèi)星導航學術年會論文集. 北京: 中國衛(wèi)星導航系統(tǒng)管理辦公室, 2018: 135-140[2021-10-16].
[9] 中國衛(wèi)星導航系統(tǒng)管理辦公室. 北斗/全球衛(wèi)星導航系統(tǒng)(GNSS)測量型OEM板性能要求及測試方法: BD 420002-2015[S]. 北京: 中國衛(wèi)星導航系統(tǒng)管理辦公室,2015: 11-12.
[10] 黃丁發(fā), 熊永良, 袁林果. 全球定位系統(tǒng)(GPS): 理論與實踐[M]. 成都: 西南交通大學出版社, 2006: 66-71.
[11] 陳曉輝, 田慧, 王濤. BDS/GPS雙差組合觀測數(shù)據(jù)周跳探測與修復方法研究[J]. 測繪科學, 2020, 45(11): 33-40.
[12] 李建文, 郝金明, 李軍正, 等. GPS/GLONASS載波相位測量模糊度解算方法[J]. 測繪學院學報, 2004, 21(3): 163-168.
Testing and analysis of the precision of GNSS receiver raw observations
CHEN Shu1, REN Yongchao1, ZHANG Xufeng2, NIU Ben1
(1. National Calibration Center for Electro-optical Distance Meter, Beijing 100039, China; 2. China Railway Engineering Consulting Group Co. Ltd., Beijing 100055,China)
In order to solve the problem of fast-growing assessment need of the precision of Global Navigation Satellite System (GNSS) receiver raw observations,with the fusion of GNSS and various sensors.Double-differenced method of zero baseline and triple-differenced method of zero baseline are proposed to test the precision of code and carrier phase measurement.The measurement principle of the precision of raw observation is deduced in detail,the test results of 10 receivers of 4 models are statistically analyzed,and the systems and frequencies include Global Positioning System (GPS) L1C/A, L2, L5,Galileo navigation satellite system (Galileo) E1, E5a, E5b, BeiDou navigation satellite System (BDS) B1I, B2I, B3I, B1C, B2a. The statistical results show that,double-differenced method and triple-differenced method of zero baseline can effectively reflect the quality of receiver raw observations.
precision of code measurement, precision of carrier phase measurement, double-differenced method of zero baseline,triple-differenced method of zero baseline
P228
A
2095-4999(2022)01-0140-07
陳澍,任永超,張緒豐,等. GNSS接收機原始觀測值精度測試與分析[J].導航定位學報,2022,10(1): 140-146.(CHEN Shu, REN Yongchao, ZHANG Xufeng, et al.Testing and analysis of the precision of GNSS receiver raw observations[J].Journal of Navigation and Positioning,2022,10(1): 140-146.)
10.16547/j.cnki.10-1096.20220121.
2021-11-18
陳澍(1985—),女,遼寧錦州人,碩士,高級工程師,研究方向為導航定位設備的測試與應用。
