醫療機器人領域科技發展水平現狀與研究熱點
2022-02-17 07:23:22葉佳慧
中華醫學圖書情報雜志 2022年7期
葉佳慧,許 鑫
進入21 世紀以后,受到技術不斷迭代的沖擊,傳統的以人口、國土面積、軍事能力為競爭依據的綜合國力競爭局面逐漸向科技能力傾斜,科技創新能力不僅能幫助一個國家在特定領域占據優勢地位,還能助推該國經濟增長[1-2]。因此,各國都將創新發展作為發展強國的重要戰略。建立科技能力評估體系,可以有效衡量一個國家在新興技術領域的創新能力和管理水平,提供優化發展的數據支撐。醫療機器人作為“大科學”時代備受關注的交叉研究領域,近年來在臨床醫學和醫學教學等各類場景都發揮了重要作用,受到各國高度重視。分析醫療機器人領域的研究熱點,及時掌握領域內最新動向和發展趨勢,在多學科融合的學術環境下明晰研究方向、拓展研究視野,對推動我國醫療機器人行業的良性發展有重要意義。
1 醫療機器人領域研究綜述
醫療機器人也稱為“醫用機器人”(medical robot),是用于醫療或輔助醫療工作的智能型服務機器人。1985 年,Yik San Kowh 等人操作PUMA 機器人進行腦組織活檢[3],機器人正式進入醫療行業,神經外科也步入機器人輔助手術時代。1988 年,倫敦帝國學院開發的世界上第一臺正式的外科手術機器人PROBOT 問世[4]。1989 年,法國推出了神外手術機器人NeuroMate[5]。美國Integrated Surgical Systems 公司在1992 年推出了機器人ROCOBOT 并完成臨床試驗[6],這是全球第一個骨科機器人。此后美國接連推出AESOP、ZEUS、Da Vinci 等機器人[7-8],對世界醫療機器人領域的發展起到了巨大的推動作用。當前,Da Vinci 機器人依舊是全球最成功的手術機器人,超過60 萬臺Da Vinci 在各地進行手術。中國醫療機器人的發展起步較晚,但研究勢頭強勁。天津大學等團隊共同研發的“妙手S”突破了人眼和人手的極限,在手術體位、圖像視角、成本等各方面占優,打破了Da Vinci 的壟斷,部分手術療效對比也進一步證實了“妙手S”跟Da Vinci一樣安全有效[9]。完成臨床試驗后“妙手S”就有機會進入機器人市場,實現國產手術機器人的商業化。
在醫療機器人相關研究領域,學者主要從各類醫療機器人的功能設計或案例分析、醫療機器人的發展現狀和前景兩個角度開展研究。在醫療機器人功能設計或案例分析方面,有學者團隊通過實操探究Da Vinci 進行膀胱切除術的安全性[10];有學者通過分析多訓練模式下的康復機器人運動,指出系統設計應多考慮患者跟理療師之間的交互[11];有學者通過設計多維力傳感器并研究其解耦方法來優化微創手術機器人在手術過程中的力反饋功能[12];有學者結合Da Vinci 實操經驗總結出“3+2”模式,用于普及Da Vinci 介入的遠端胃癌根治術[13]。在醫療機器人發展現狀、應用前景及發展趨勢方面,有學者對醫學機器人的重要研究和已有的商業系統進行分析,指出未來的機器人應用仍存在儀器化和手術室集成、人機交互、形狀和力傳感三大挑戰[14];有學者借助文獻和專家訪談分析中國醫療機器人在發熱門診的使用情況,提出要突破專利壁壘,采取更精細化的發展戰略[15];有學者通過分析論文和專利數據研究全球醫療機器人技術領域的發展態勢,指出各國的技術領域分布各有不同[16];有學者從建模、交互、協調和優化4 方面對人機智能技術展開論述并進行了總結和展望[17];有學者通過分析論文和專利數據研究當前微創手術機器人在各國的發展情況和前沿熱點,指出美國在該領域的產出能力遠高于其他國家,而且手術機器人領域的論文和專利的研究重點也不同[18]。
除了理論研究,針對學術創新的成果與意義構建評價指標,也是各國科技創新發展的一環。國內的科技創新評估多從人才、投入與產出3個維度構建指標,但其中產出維度的指標構建往往只關注數量而忽略質量[12-13];德國學術界主要借助同行評議構建8 個領域34 個指標的評價體系,數量同樣是其指標設計的重點[19]。然而國內外指標的設定都以經濟投入為重點,忽略產學研等主體機構間的聯系,脫離了學術交流這一推動科研深入的極為重要的環節。
當前科研產出主要有科技論文和專利兩種形式。科技論文是學術研究成果的載體,而專利可以作為科學技術的信息源,承載技術創新的核心能力[20],二者各有側重點。以往的研究主要在研究主體關系之間展開,如參與文獻和專利產出的不同機構、不同國家之間的合作關系,分析某領域的學術主導力量;而近年來的研究開始將研究關注點轉向論文和專利的研究方向和技術領域。在醫療機器人領域,目前還沒有基于科技論文和專利數據對各國的跨國合作網絡、質量調整專利等問題進行綜合研究的文獻,故本文以蘭德公司提出的評估國家科技水平的方法[21]為主,輔以科技論文和專利的研究熱點分析,對醫療機器人領域進行分析。
2 分析方法與數據來源
2.1 方法介紹
本文的分析分為現狀分析和研究熱點分析兩部分。進行現狀分析時使用蘭德公司提出的開源方法;進行研究熱點分析時分別使用VOSviewer 和LDA 主題識別模型提取文獻和專利數據進行研究。
基于科技論文和專利數據,蘭德公司提出了一種快速的、開源的國家科技水平評估方法,設計初衷是給美國國防部和情報部門針對新興技術的演變決策提供決策工具。該方法設定了高影響力文獻產出、文獻合作網絡密度、質量調整專利、科技組織能力4 項獨立指標,以避免綜合加權指標掩蓋國際差異,在確保透明度、通用性和可擴展性的基礎上快速評估國家在某領域的科技水平。
高影響力文獻產出:Web of Science 數據庫中某一特定領域所有文獻被引頻次前10%的文獻數量。與文獻數量相比,該指標更注重文獻質量對科技水平的推動。
文獻合作網絡密度:即各國的跨國合作網絡。該指標衡量科學共同體之間的連通性。
質量調整專利:通過專利質量調整得到相對公平的數據量,即通過專利家族加權處理體現專利質量的國際異質性。調整公式如下。
科技組織能力:即各國在相關領域產出科技論文或專利的組織數量。該指標可用于衡量一個國家用于推動該領域發展的機構資源水平。
2.2 數據采集
選擇Web of Science核心數據集和Incopat專利數據庫作為數據來源。在醫療機器人領域,國內已有學者對“人工智能+醫療”新興技術進行文本挖掘研究[22]。本文借鑒其檢索式,補充部分關鍵詞,生成本文檢索式:TI=(medical*OR medicine OR surgery OR rescue OR simulation OR recovery OR medical service OR health service OR assist OR capsule OR nano-targeting OR nurs* OR diagnosis OR transit)AND TI=(robot* OR manipulat*)NOT TI=industrial*。
文獻檢索時間范圍為2017 年1 月1 日至2021年12 月31 日,篩選文獻類型為期刊論文、會議錄論文、綜述論文、會議摘要、社論材料,最終檢索得到相關文獻12 387 篇。
專利檢索式限制專利狀態為“有效”或“PCT-有效期內”,檢索時間范圍為2017-2021 年,過濾救援機器人、工業機器人、水下機器人等不相關關鍵詞,最終得到相關專利數據3 410 條。
3 醫療機器人領域科技發展水平評估
參與分析的指標數據來源為科技文獻和專利數據,科技機構、合作網絡等分析數據也來自科技文獻和專利數據。科技文獻作為基礎研究成果,是最普遍的科研產出資料,而專利作為技術創新的成果,代表了特定領域最先進的技術研究。科技創新的不斷深入,勢必會有科技文獻和專利的產出,故本文認為基于這兩類數據進行評估具有可推廣性。在此基礎上,本文選取4 項指標數據能夠參與分析且均排名靠前的8 個國家進行分析,分別是中國、美國、意大利、英國、德國、法國、韓國和日本。
3.1 高影響力文獻分析
在得到的12 387 條文獻數據中,選取被引頻次為14 及以上的高影響力文獻1 241 篇。
圖1 顯示了2017-2021 年期間產出的12 387篇文獻的整體被引頻次分布。有5 074 篇在筆者統計時尚未被引用。表1 顯示了當前高影響力文獻數量排名前8 位的國家的高影響力文獻數量。可以看出,2017-2021 年,美國在醫療機器人領域的高影響力文獻產出量遠遠大于其他國家,全球占比為41.58%。意大利、中國、英國發表高影響力文獻數量相近。
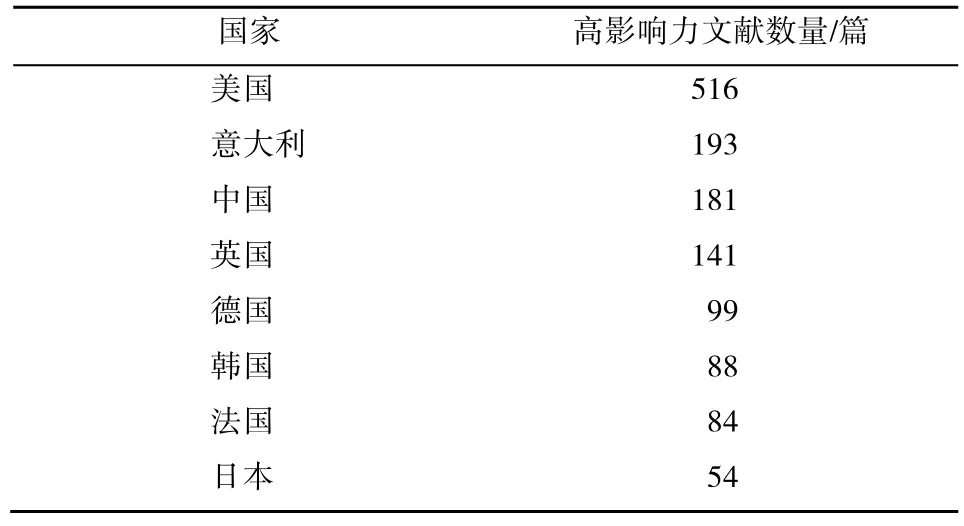
表1 醫療機器人領域高影響力文獻數排名前8 位的國家的高影響力文獻數量
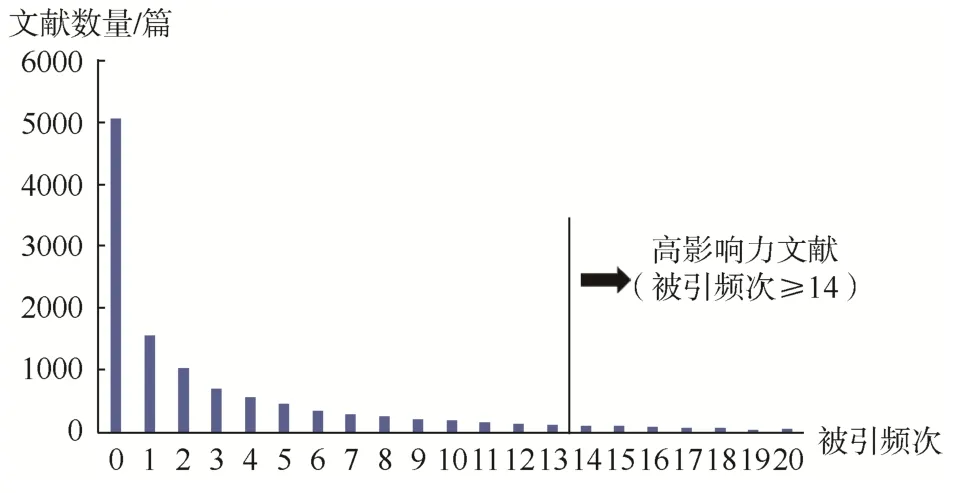
圖1 2017-2021 年醫療機器人領域產出文獻的被引頻次整體分布
3.2 合作網絡密度
借助VOSviewer 軟件計算全球范圍內機構合作連接強度,并得到合作連接強度排名前8 位的國家的相應數據(表2)。
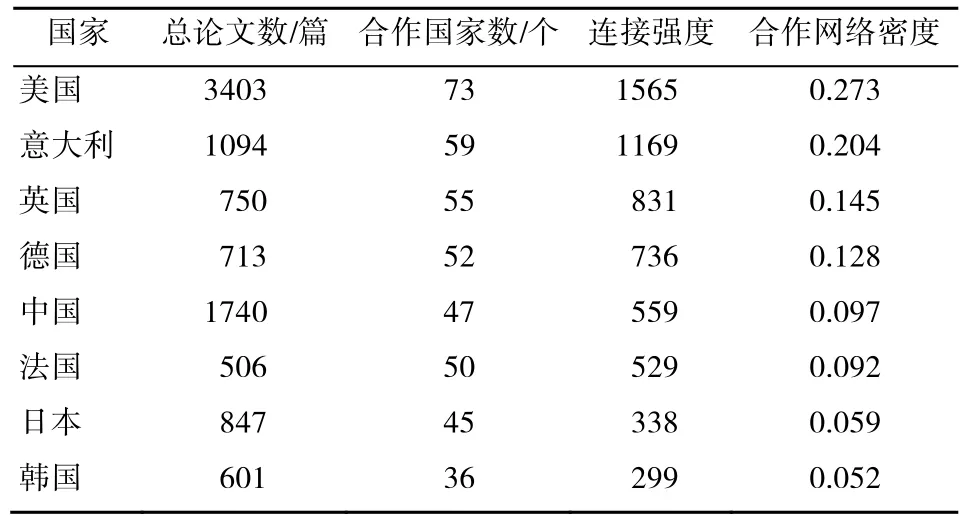
表2 各國合作網絡密度
從表2 可以看出,美國、意大利的合作網絡密度依舊占據前兩位,與高影響力文獻數量排行對應。整體來看,歐美國家注重跨國機構之間的文獻產出合作,對比之下,亞洲國家合作網絡密度極低。如中國的文獻數量僅次于美國,但機構合作連接數卻低于英國和德國,說明中國學界的醫療機器人研究多集中在國內機構,并不注重跨國交流,國際合作表現不佳。
3.3 質量調整專利
表3 顯示了質量調整前后各國申請的專利數目。根據簡單專利家族數分別計算世界和各國平均專利家族數后相除得到調整系數,代入公式(1)得到新的專利數量。調整前后的專利數量正負變化代表該國家專利質量的優劣。
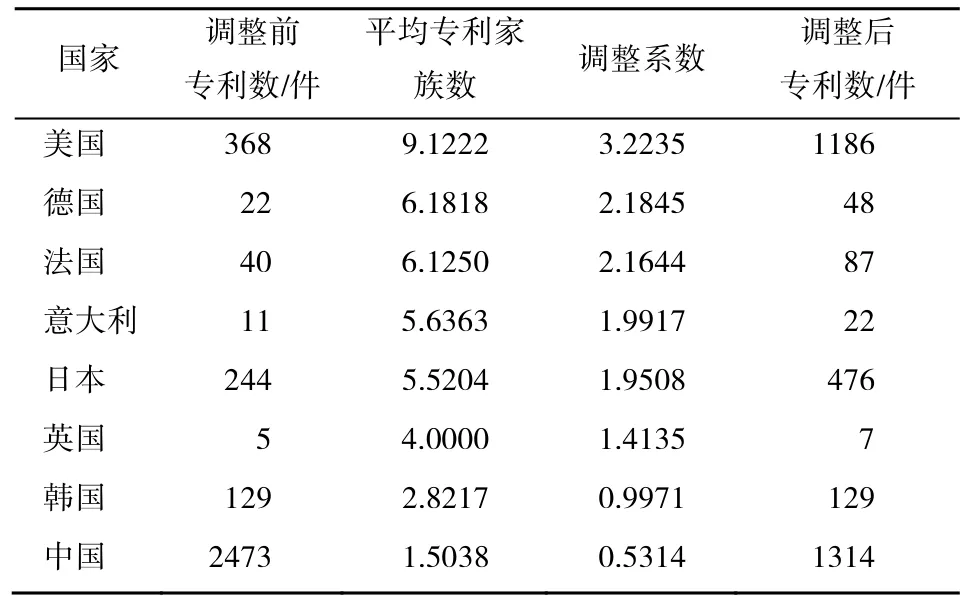
表3 各國專利質量調整情況
質量調整后,中國的專利申請數量由2 473 下降至1 314(表3),是所有納入分析的國家中唯一大幅負方向波動的國家。美國、德國、法國等國家雖然專利申請數量少,但是調整后專利數量都大幅增加,說明這些國家的專利質量普遍很高,而中國由于專利補貼政策、專利個人買賣等因素導致“專利泡沫”存在,整體專利質量較低,與世界平均水平差距較大。
3.4 科技組織能力
2017-2021 年,各國的文獻發表機構數量和專利申請機構數量如表4 所示。中國和美國的機構數量遠高于其他國家。
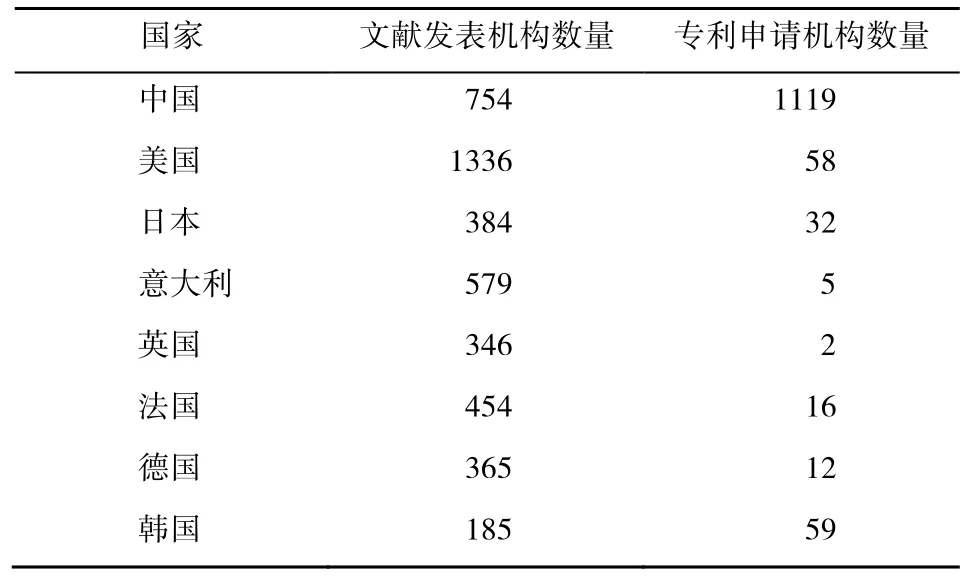
表4 各國文獻/專利產出機構數量
盡管中國專利申請機構數量龐大,但是調整后的專利數量使平均每家申請機構申請的專利數從2.21 下降到1.17,說明較多機構申請的專利質量較低。
3.5 文獻高產出機構分析
使用VOSviewer 對文獻產出機構進行共現分析,由于機構數量龐大,所以選取發文數量>30 篇的機構參與分析,得到如圖2 所示的共現結果。可以看出,世界醫療機器人領域的文獻主要來自高校,營利性醫學中心和國家級別科研機構也參與產出,社會企業等機構產出甚少。共現結果還顯示,歐美機構連接網絡密度極高,說明歐美國家國內外機構之間的合作十分密切,而中國、韓國、日本等國家的節點密度較為稀疏,整體上傾向于內部合作。
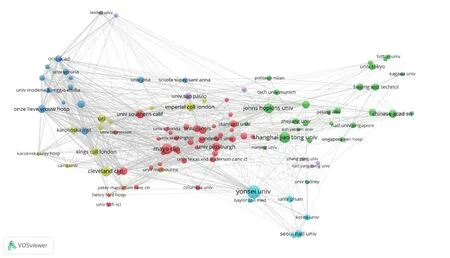
圖2 文獻產出機構共現結果
4 醫療機器人領域前沿熱點分析
4.1 文獻研究前沿熱點
使用VOSviewer 軟件對文獻樣本的關鍵詞進行共現分析,由于關鍵詞數量龐大,所以合并同義詞后,選取出現頻次>50 次的關鍵詞(共157 個)進行分析,結果如圖3 所示。
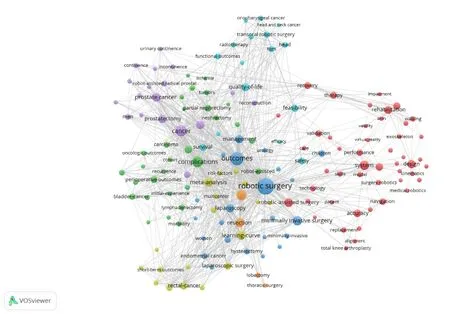
圖3 文獻關鍵詞共現結果
VOSviewer 將關鍵詞聚成7 類,根據每類關鍵詞的詞義,可將其分別概括為醫療機器人分類及系統設計、膀胱癌治療、醫療機器人綜合要點、學習曲線等理論要點、泌尿科疾病治療、頭頸部癌癥治療、胸外科手術。
文獻關鍵詞共現圖整體聯系緊密,手術機器人(robotic surgery)處于整個網絡的中心且節點最大,說明手術機器人研究在領域研究中占據領導地位。微創手術(minimally invasive surgery)、切除術(resection)、學習曲線(learning-curve)、系統(system)、并發癥(complication)、前列腺癌癥(prostate cancer)等關鍵詞分別圍繞在手術機器人周圍,屬于不同關鍵詞聚類中的研究重點。表5顯示了每個聚類中的部分關鍵詞。
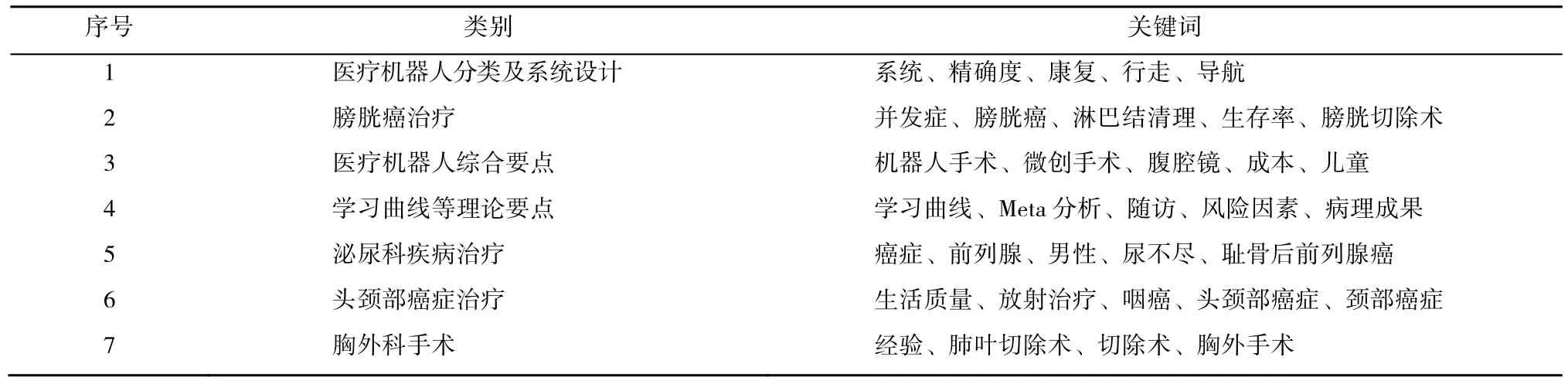
表5 醫療機器人領域文獻7 大聚類關鍵詞示例
4.2 專利研究前沿熱點
借助LDA 主題模型挖掘法對專利摘要進行主題分類。采用一致性作為主題數確定標準,計算結果如圖4 所示,選取最優結果K=5 作為最佳主題數。根據聚類輸出5個主題的關鍵詞并人工歸類不同主題(表6),同時通過pyLDAvis 輸出主題分類可視化結果。
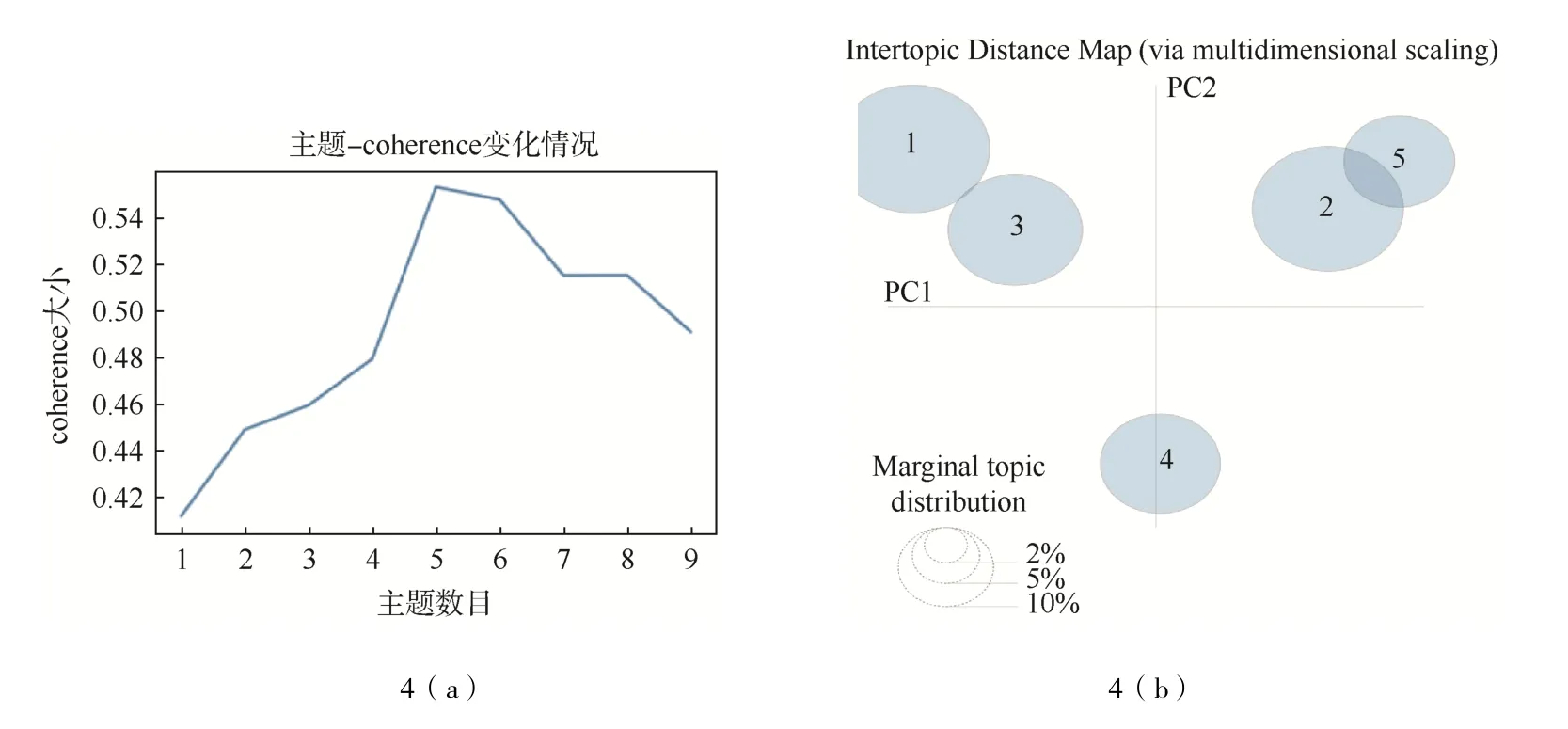
圖4 一致性結果和pyLDAvis 可視化
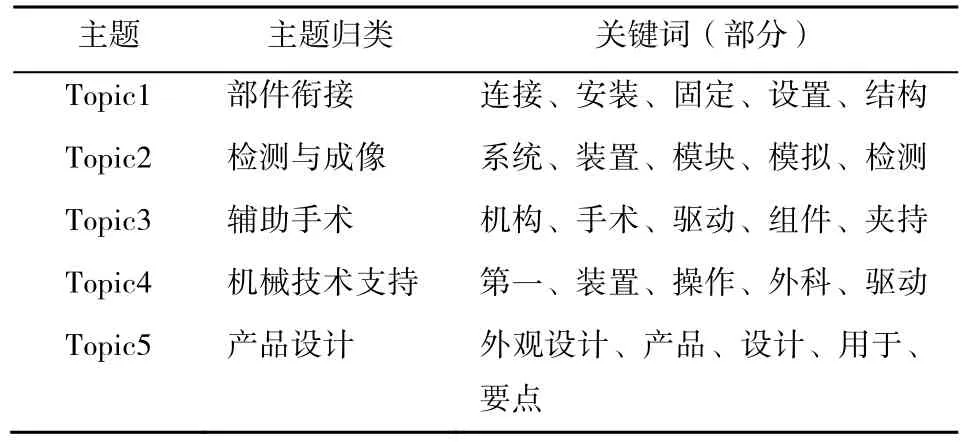
表6 LDA 主題分類數據
5個主題可以歸納為裝置與機械支持(Topic1、Topic4)、輔助醫療(Topic2、Topic3)和產品外觀設計(Topic5)3個部分。Topic1、Topic2 占比最高,說明專利摘要涉及機械部件銜接、檢測與成像等方面的內容較多。結合圖5 所示的專利IPC號小類分布可以看出,A61B(診斷、鑒定)、B25J(機械手)、A61G(運輸工具)小類的專利申請數量最多,說明在專利領域,技術研究集中在內窺鏡等用于檢查、診斷疾病的醫療儀器,以及用于患者運輸、康復治療等用途的物理支持技術方面。
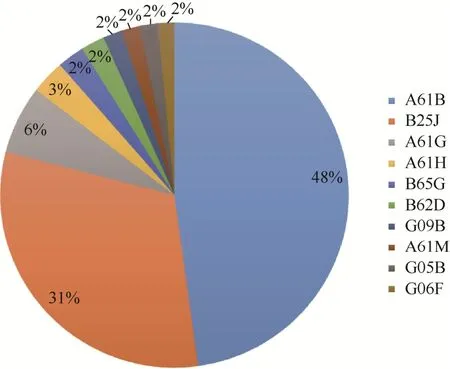
圖5 醫療機器人相關專利IPC 號小類分布
5 對我國醫療機器人賽道發展的啟示
我國《“十四五”醫療裝備產業發展規劃》明確指出了我國醫療機器人行業到2025 年的發展目標和重點任務,以推動產業進入發展成熟期,實現建設“健康中國”的目標。在此背景下,結合前文現狀和熱點分析,本文提出以下建議。
5.1 重視國際交流與合作
現今,全球已進入大科學時代[23],各領域的技術發展都開始呈現多學科結合的趨勢,科學問題的復雜度都不斷上升,尤其是一些國家級的科研項目,從規模、技術難度到資金投入,都非單個國家能承擔的,科學國際化成為必然趨勢。國外學術界多以同行為聯結紐帶,開展跨機構、跨國別的學術交流。韓國延世大學創立了跟世界頂尖學者合作的平臺“延世前沿合作社”[24],鼓勵師生在世界范圍內開展合作。美國創立國家實驗室與一流研究型學校合作模式,吸引全球各領域的頂尖人才來深造,形成美國學術界與赴美學者雙贏局面[25]。我國則多以同事作為紐帶開展合作,跨國別合作較少[26],這就解釋了我國科技文獻產出機構與國外機構的交流合作不如歐美機構之間密切的現象。這種研究模式約束了研究視角,阻礙了學科多元化融合。也有一些國內機構開展了與國內其他機構及國際機構的合作。如上海交通大學創立“上海交通大學醫療機器人研究院”,集中研究各類醫療機器人,同時還跟國內醫院開展臨床合作,此外還開展了暑期交流項目,邀請世界范圍內的醫療機器研究領域頂尖學者和高等院校學生參與醫療機器人相關學習討論,為自身的跨國合作交流提供了路徑。我國應該充分利用便利的互聯網環境,跳出“同事”藩籬,積極開展國際合作,提高創新與科研能力。
5.2 完善專利質量補貼機制和專利立法
當前,我國的專利市場發展還處于“重開發輕質量”的階段,大量的專利并非是發明設計,而是微小改良[27]。同時,政府為了鼓勵創新而提出的專利資助辦法使政府的專利補貼機制變成了政府對專利的“購買”機制,扭曲其真實出發點,是對低質量專利的變相激勵,一定程度上造成了“專利泡沫”[28-30]。在這方面,歐美國家采取的措施具有借鑒意義。美國是世界上第一個對專利質量立法的國家,2015 年通過了制裁“專利流氓”的法案,對專利質量進行嚴格的把控。而《歐洲專利公約》提出了一種異議程序,專利申請人不僅可以在程序內申請專利,針對有異議的專利,也可以在其獲得授權后的9個月內提出反對,有效的反對意見會直接對該專利產生影響[31],賦予所有人監督權來提高授權專利的質量。我國需在借鑒有效制度的基礎上因地制宜,完善專利審查制度、合理制定創新激勵政策,也需對違規“專利買賣”進行嚴厲打擊,從源頭杜絕低質量專利的流通。
5.3 促進“政產學研用”緊密聯系
促進“產學研”合作,本質是將作為研究成果商業化主體的企業和作為技術產出的高校和研究機構連接在一起,實現新興技術從理論研究到實際應用的生產要素合并流程。以美國為例,機器人進入醫療領域后,美國國家航空航天局(National Aeronautics and Space Administration,NASA)研究員加入斯坦福國際研究院(Stanford Research Institute,SRI)開發VR 遠程手術技術,之后美國陸軍利用該技術遠程為傷兵治療,部分研究員最終成立公司并將手術機器人引入民用外科手術中[32]。而我國的機器人研究集中于高校和研究所,企業依賴性低,醫工也并未實質融合,多數研究無法進入臨床環節[33-34]。當前創新環境正在將傳統“產學研”合作推向“政產學研用”協同發展,將政府的平臺構建功能和監管協調功能引入各領域。事實上,我國的數據平臺構建處于萌芽期,相關的制度化標準也尚未完善,而美國、日本及歐盟等都頒布了人工智能倫理規范或法案等[35]。與之相比,我國的政策力度就略顯薄弱。我國應以市場為目標導向,以用戶為市場主體,提高“研究-技術-成果”轉化效率,積極創建數據平臺和監管,推動我國“政產學研用”大環境的搭建。
5.4 確保不同研究階段的賽道同步發展
目前,腹腔鏡技術的理論研究及其在泌尿學、腎臟學等醫學領域的應用研究已在各國受到重視,我國在這些熱門領域的研究起步晚于歐美等發達國家,盡管近年來大力發展科技,助力醫療機器人產業發展,但是差距依然存在。而在神經外科等領域,機器人相關研究與實探雖然起步很早(PUMA就是神經外科機器人),但由于手術精度高、機械技術受限等原因,研究進度遠不如泌尿科、內科手術等領域。所以在神經外科領域,我國的研究進度與世界水平齊平。除了在熱門領域不斷追趕發達國家外,我國在神經外科等非劣勢賽道也需要持續關注,在已有研究基礎上推動機器人的臨床實踐,擴展更多細分手術領域。
5.5 引導醫療機器人市場全面發展
目前世界醫療機器人領域的研究熱點分布在癌癥治療、疾病診斷、病人運輸、康復治療等方面,且市場上手術機器人占比最高。相比之下,我國醫療機器人市場中康復機器人的占比最高,且遠高于手術機器人,處于“偏科”狀態[36],這種現象的出現雖然有社會日益老齡化的原因,但也說明我國的手術機器人等研究多數停留在項目階段,并未轉移至臨床環節。在當前我國人口日益老齡化、“三胎”政策實施的前提下,人們對醫療健康的訴求越來越高,除了康復機器人和手術機器人,未來各類家用醫療機器人、服務機器人的需求都不容小覷。除了加速“產學研”產業鏈的形成,還需要政府大力引進、鼓勵各類醫療機器人進入醫院,扶持、激勵醫療機器人產業健康、積極發展,打造“醫生-患者”雙贏局面。
6 結語
近年來醫療機器人受到世界各國的廣泛重視,未來還有很大的發展空間,跟蹤、了解領域內研究熱點,能夠幫助研究主體機構了解新興動向,還能為決策部門提供有效信息。本文通過4 個獨立指標的分析,對八大科技強國的科技發展水平進行評估,不同國家的研究各有特點,歐美國家注重跨機構、跨國別的交流合作和高質量成果的產出,亞洲國家更偏向于獨立研究;歐美國家注重專利質量,中國在專利數量方面占據優勢,但在專利質量的把控方面還有很大的提升空間。
近些年來,全球醫療機器人市場規模增長迅速,手術機器、康復機器人發展迅猛,各種細分領域的醫療機器人也逐漸運用于醫療服務。隨著數字化、智能化的不斷深入融合和多應用場景需求的增加,醫療機器人無疑是未來前景一片廣闊的“藍海”,我國利益相關者需深刻認識到當前我國在該賽道尚有不足,需不斷鞏固自身優勢、填補短板,在這片“藍海”占有一席之地。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
學苑創造·B版(2021年2期)2021-03-15 05:50:49
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
少兒科學周刊·兒童版(2017年9期)2018-03-15 15:00:11
汽車工程學報(2017年2期)2017-07-05 08:13:02
兒童故事畫報·發現號趣味百科(2017年4期)2017-06-30 12:41:53
兒童故事畫報·發現號趣味百科(2016年6期)2016-08-19 06:35:19
