安全距離-時間模型的汽車緊急制動分層控制策略研究
2022-02-18 08:29:42敖宏偉陳學文榮同康
重慶理工大學學報(自然科學) 2022年1期
關鍵詞:系統
敖宏偉,陳學文,榮同康
(遼寧工業大學 汽車與交通工程學院, 遼寧 錦州 121001)
汽車緊急制動系統作為高級輔助駕駛系統的一部分,可以在追尾事故發生前主動對車輛進行制動,降低車輛追尾事故發生的概率[1-4]。據E-NCAP的研究數據,自動緊急制動系統可以避免27%追尾事故的發生,未來AEB系統將在人們行車安全中扮演更加重要的角色。
國內外研究機構與科研人員對汽車緊急制動系統控制策略及產品開發進行了廣泛研究。Baldovino等[5]利用模糊脈寬調制技術開發了一款智能AEB控制算法,引入微型模糊關聯矩陣(FAM)表算法來減少計算規則的數量。Rosado等[6]在研究自動緊急制動系統時引入“主動安全裕度”的概念,提出了一種能夠預測碰撞速度、停止距離和停止時間的AEB分析模型。Ioana等[7]在不同附著系數的路面上對自適應AEB系統與傳統AEB系統進行實驗,實驗結果表明:帶有自適應AEB系統的車輛可以更好地避免交通事故的發生。別克公司推出的智慧行車科技系統,可以對本車道內的前方目標車輛進行實時監測并預警,當駕駛員未采取制動措施時,采取緊急制動減輕或避免碰撞事故帶來的危害。
李霖等[8]對駕駛員在危險工況下的制動行為特征進行提取,分析了制動過程中本車的平均制動減速度以及制動開始時刻的TTC值,并以此搭建了危險目標估計模型,設計了分級預警/制動模型。吳飛[9]利用綜合加權法建立了碰撞預警的安全距離辨識模型,基于分層控制思想搭建了上層控制器,降低了誤報警率。
目前國內外車企對于AEB系統采用的常用模型為安全距離模型、安全時間模型,現有的控制策略難以應對實際車輛行駛過程中復雜多變的交通環境,在前方危險目標的選取、危險狀態判斷、制動介入時刻、制動力大小的選取等方面仍有較大的改善空間。
本文考慮了相鄰車道前方車輛換道工況,對前方危險狀態判斷與目標確定、制動介入時刻與制動強度的選取等關鍵問題進行深入研究,設計了危險目標模糊判別控制器,將安全距離模型與安全時間模型相結合,建立了自動緊急制動分級制動策略,實現了危險目標判別、預警/分級制動與避撞等功能,提升現有AEB系統的可靠性。
1 汽車緊急制動分層控制總體策略
圖1為汽車緊急制動系統功能邏輯框圖,以分層式控制思想為基礎架構搭建AEB控制系統,包括功能定義層、上層控制器、下層控制器及本車控制執行器,行程閉環反饋控制系統。
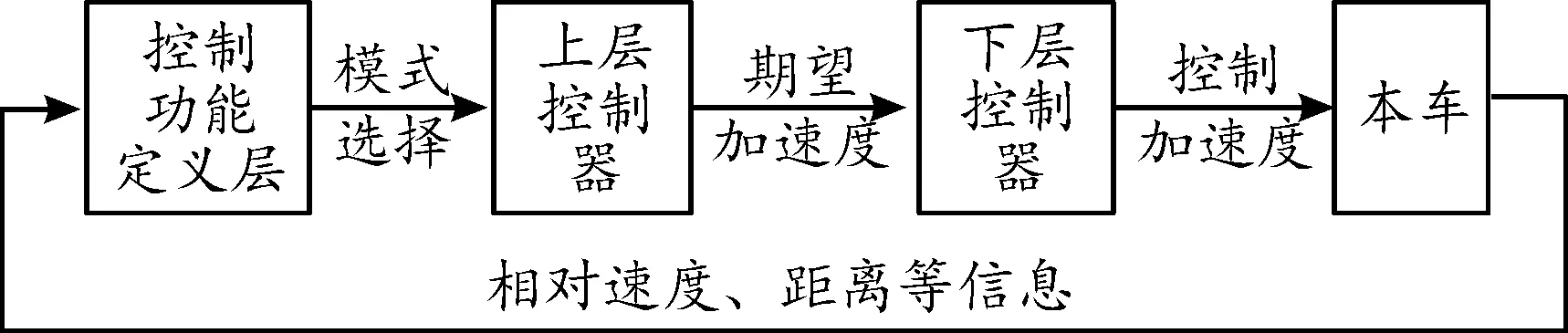
圖1 汽車AEB系統功能邏輯框圖
控制功能定義層依據當前工況下的車輛信息,決定控制模式的選擇以及切換。當預警信號發出后,若駕駛員未采取制動措施,則系統將執行模塊切換至節氣門開度控制模式,此時駕駛員若未采取制動措施,并且系統判定有碰撞風險,則系統自動切換至制動壓力控制模式,及時進行緊急制動,避免車輛發生碰撞。
汽車緊急制動系統的上層控制器根據信息采集模塊采集到的本車與前車的車速、相對距離、節氣門開度、發動機轉速等信息,輸出本車期望加速度。
由于上層控制器計算得到的本車期望加速度無法直接作用于本車,并且搭建的汽車動力學模型存在誤差以及外界條件的干擾,因此,需要下層控制器將期望加速度轉化為控制加速度作用于本車。再經由反饋將車輛的實時信息傳送進控制模塊,進入下一輪信息處理,形成閉環控制(如圖2所示)。
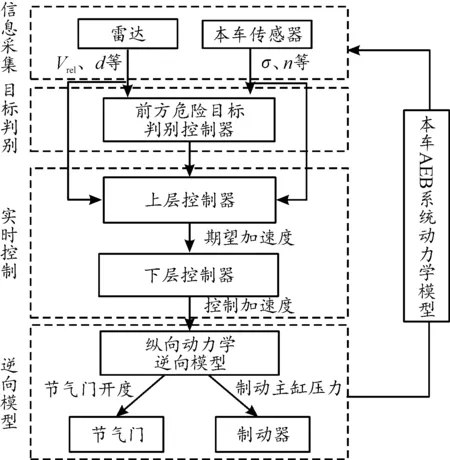
圖2 汽車AEB系統總體設計框圖
2 汽車緊急制動分層控制器設計
2.1 危險目標模糊判別控制器設計
危險目標判別控制器包含前方車輛換道判斷模塊、前方危險目標判斷模塊。
2.1.1前方車輛換道判斷模塊
相鄰車道前方車輛換道判斷模塊控制器基于模糊控制理論搭建,輸入為本車和前方目標車輛的側向相對速度v、側向相對距離d,輸出目標車輛換道進入本車道的概率p。
1) 模糊化。本文在研究過程中考慮到本車與目標車在實際行駛過程中側向相對速度、側向相對距離以及目標車換道概率的變化范圍,采取5個模糊子集(NL,NM,ZE,PM,PL)對控制器的輸入、輸出進行描述。
2) 確定隸屬度函數。選取三角形和梯形隸屬度函數[3,10]。設定側向相距離d隸屬度函數區間[-2,2.5] m(如圖3所示),側向相對速度隸屬度函數區間[0,1] m/s,切入本車道概率p隸屬度函數區間[0.2,0.8]。

圖3 側向相對距離d隸屬度函數
3) 建立模糊規則庫。本文依據車輛在實際路況中的行駛規律和駕駛員的駕駛經驗,建立25條模糊控制規則,如表1所示。

表1 模糊控制規則
4) 模糊推理與解模糊化。采用Mamdani模糊推理法對模糊集合進行推理[11-12],由于重心法能使系統輸出更為平滑,所以本文選用重心法對輸出量進行模糊判決,獲得目標車切入本車道的概率。
2.1.2前方危險目標判斷模塊
目標車與本車的相對位置如圖4所示,所有車輛處于同向各直行車道內,假設本車前進方向為x軸正方向,本車左向為y軸正方向。目標車1相對于本車車頭的縱向距離與車身的橫向距離分別為drx和dry,則危險目標判斷控制器判斷邏輯如下。
1) 當本車道前方有目標車輛時,系統優先將本車道前方的目標車輛(目標車3)設定為危險目標;
2) 在情況1)的基礎上,當相鄰車道內出現目標車輛(目標車1和目標車2),系統首先將所有目標車輛的縱向距離(x1、x2、x3)進行比較:
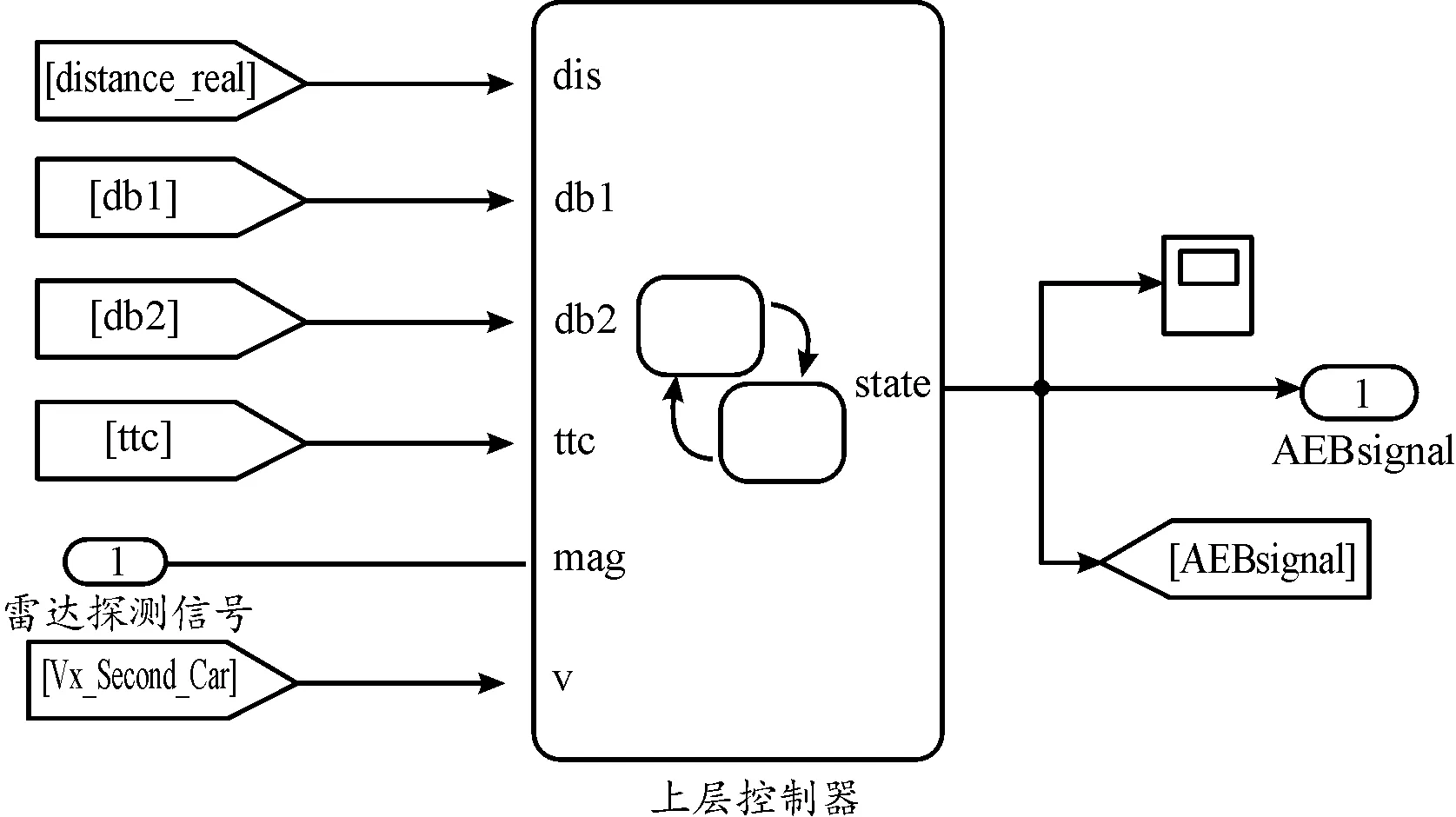
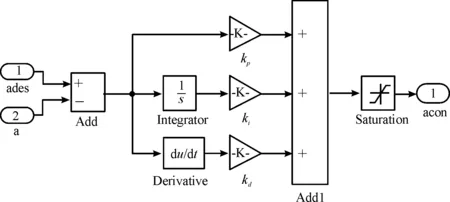
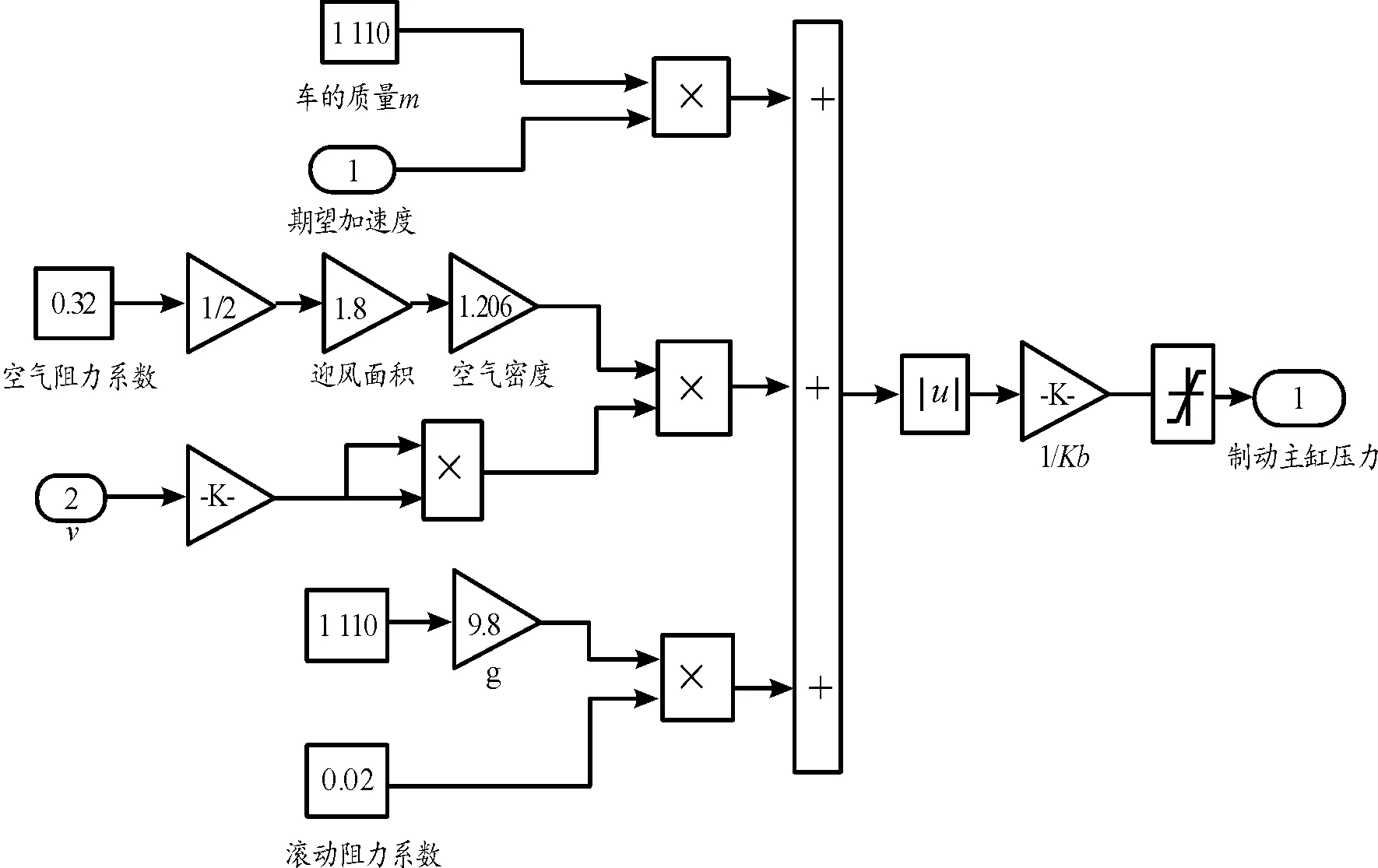
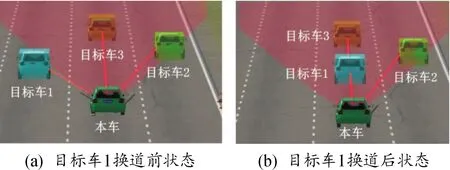
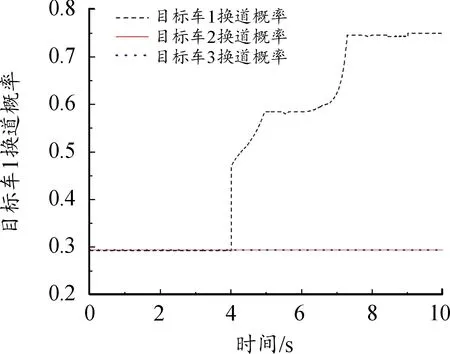
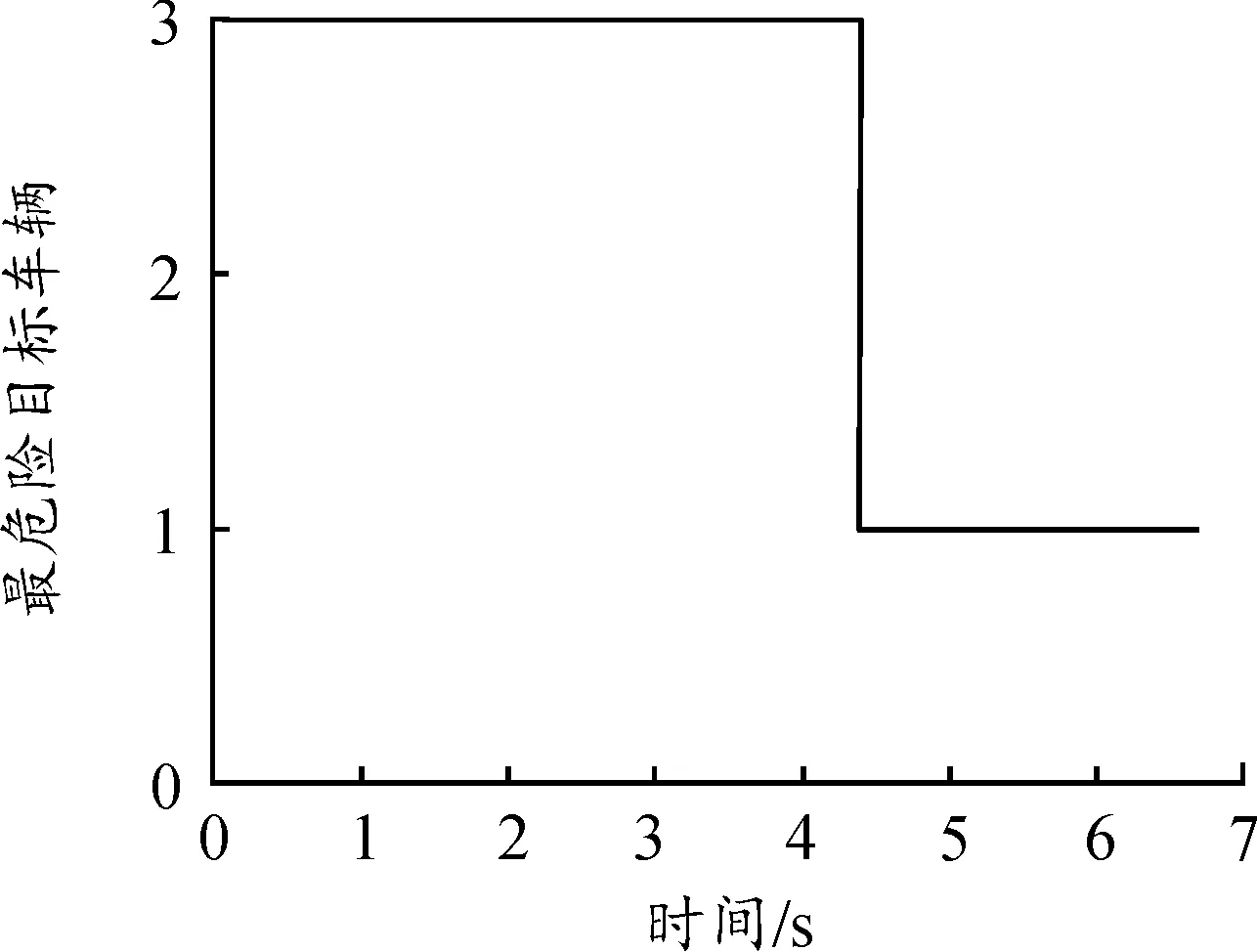
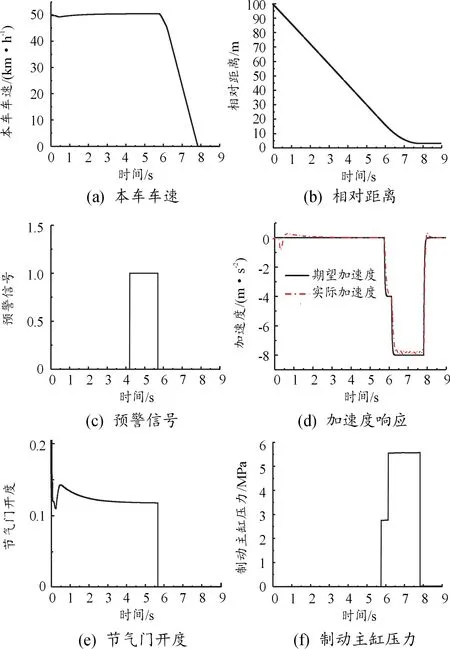
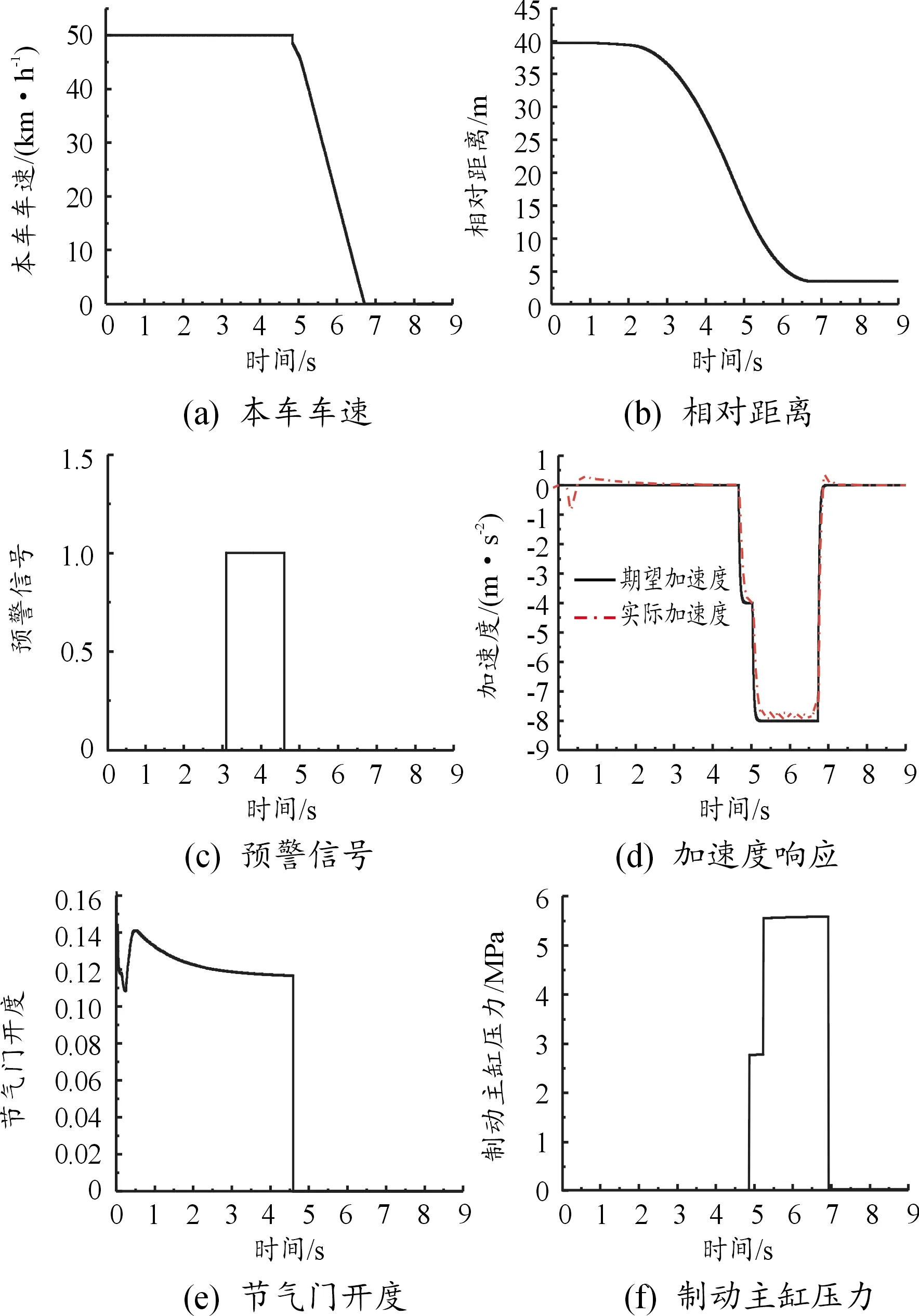
① 若x3 ② 若x2 ③ 若x3>x1且x3>x2,首先比較目標車1和目標車2的換道概率,選取換道概率大的目標作為危險車輛的“待選目標”,然后基于安全時間模型計算出目標車3的縱向碰撞時間TTCx與“待選目標”的橫向碰撞時間TTCy,TTC較小的目標即為危險目標車輛。 圖4 目標車與本車相對位置示意圖 在y方向上,本車與目標車1發生碰撞的條件如式(1)所示。 dry+vry×TTCy≤0 (1) 同理,可以類似得到右側車道車輛換道進入本車道發生碰撞的條件。 TTC的總體計算如式(2)所示。 (2) 式中:dr表示前后兩車間的相對距離;vr表示兩車間的相對速度。 利用Matlab中Stateflow模塊將本車安全行駛狀態、預警狀態及分級制動狀態間的切換邏輯進行狀態流搭建,實現上層控制器中本車狀態邏輯的判斷,最終輸出本車的期望加速度。圖5為基于有限狀態機理論的上層控制器模型,模型的輸入變量為:前后車相對距離、一級制動距離db1(該距離為制動過程中兩輛車行駛的總路程之差與兩車間的最小安全距離之和,其中包含了駕駛員反應時間內本車的行駛距離)、二級制動距離db2、碰撞時間TTC、雷達探測信號、本車車速。輸出變量為:AEB系統響應狀態,其中“0”代表安全狀態,AEB系統不干預駕駛員駕駛車輛;“1”代表預警狀態,AEB系統以聲音和燈光提醒駕駛員有碰撞的危險;“2”代表一級制動狀態,上層控制器輸出-4 m/s2的期望加速度;“3”代表二級制動狀態,上層控制器輸出-8 m/s2的期望加速度。 圖5 基于有限狀態機理論的上層控制器模型框圖 上層控制器能夠根據本車與前方危險目標車的相對距離、相對速度以及相對加速度計算出碰撞時間,當碰撞時間達到預警閾值時,系統對駕駛員進行預警;當本車與前方危險目標車的相對距離不斷縮小至由安全距離模型規劃出的一級制動距離db1時,上層控制器輸出-4 m/s2的期望加速度;當相對距離進一步縮小至二級制動距離db2時,上層控制器輸出-8 m/s2的期望加速度。 本文采用的一級制動距離db1和二級制動距離db2分別如式(3)和式(4)所示。 (3) (4) 式(3)與式(4)中,db1為一級制動距離;d0為兩車的最小安全距離;amax為兩車所能獲得的最大減速度;Th為駕駛員反應時間;Ts為系統延遲時間。 基于PID控制理論,構建了汽車緊急制動系統下層控制器(如圖6所示)。通過調整本車實際加速度與上層控制器得到的期望加速度偏差,得到本車控制加速度。 圖6 汽車緊急制動系統下層PID控制器框圖 上層控制器根據前方危險目標規劃出的本車期望加速度無法直接作用于本車。本車的速度只能通過調節發動機節氣門開度或制動器制動壓力實現控制。因此,需要建立車輛縱向動力學逆向模型(因篇幅所限,該理論模型可參見本課題組前期研究工作[13]),將期望加速度轉化成制動器制動壓力或者節氣門開度作用于本車,使車輛緊急制動。 本文基于CarSim構建了車輛縱向動力學模型(包含了動力學的逆向模型),如圖7所示,并在Matlab/Simulink中搭建節氣門/制動壓力控制分配邏輯仿真模塊(如圖8所示)。 圖7 基于CarSim構建的車輛縱向動力學模型框圖 圖8 期望制動壓力控制分配邏輯仿真模塊框圖 基于CarSim構建了車輛縱向動力學模型,其主要結構參數如表2所示。 表2 車輛動力學模型主要參數 CarSim仿真工況設定:車道寬度4 m,以20 m/s勻速行駛;目標車1位于左側車道中線,距本車前方30 m處,以20 m/s勻速行駛,4 s時以0.9 m/s橫向速度切入本車道;目標車2位于右側車道中線,距本車前方50 m處,以20 m/s勻速行駛;目標車3位于本車正前方80 m處,以20 m/s勻速行駛,4 s時,以-4 m/s2的縱向加速度進行制動,仿真過程中車輛位置如圖9所示。 圖9 危險目標判別仿真工況示意圖 基于上述的仿真工況,通過本文設計的前方車輛換道判斷模塊控制器得到了各目標車的換道概率,其仿真結果如圖10所示。 從圖10可以看出,目標車1達到換道概率0.51的時刻為4.3 s,因而系統判定目標車1在4.3 s時發生了換道行為,因此,目標車1為潛在的危險目標。 圖10 目標車換道仿真結果 當系統判定相鄰車道前方車輛將會進行換道時,會根據本車道內前方車輛以及換道車輛的相對速度、相對距離等信息,通過安全時間模型計算出碰撞時間TTCx、TTCy并進行比較,最終判斷出危險目標。危險目標判別控制器輸出了本車與目標車1與目標車3的碰撞時間,如圖11所示。 圖11 本車與目標車碰撞時間 從圖11可以看出,在仿真時間4 s時,由于目標車1開始向本車道靠近,目標車3開始制動,導致目標車1與目標車3的TTC值產生階躍信號。目標車1在t=4 s時的TTCy=2.7 s,此后TTCy值以固定斜率逐漸降低;同時,目標車3以4 m/s2的加速度做勻減速運動,在之后的較短時間內,由于本車與目標車3的相對速度較小,導致碰撞時間TTCx的值很大(TTCx最大值限定在10s)。從圖11可以進一步得知,目標車1的碰撞時間TTCy始終小于目標車3的碰撞時間TTCx,因此,當0 s 前方危險目標判斷模塊控制器輸出危險目標如圖12所示。其中,縱向刻度“1”“2”“3”分別代表目標車1、目標車2及目標車3。仿真時間0~4.3 s控制器默認本車道內前方目標車3為危險目標,在仿真時刻4.3 s,由于目標車1被判為換道目標且與本車的側向碰撞時間小于目標車3的縱向碰撞時間。因此,控制器在4.3 s后判斷目標車1為危險目標,控制器判別結果與預期一致。 圖12 危險目標判斷仿真結果 基于C-NCAP典型測試工況,圍繞本車接近前方靜止車輛(CCRs)、本車接近前方低速車輛(CCRm)及本車接近前方緊急制動車輛(CCRb)等不同車速條件下驗證了本文策略的合理性。由于篇幅所限,本文重點給出了CCRs工況下本車以50 km/h的初速度接近前方100 m處靜止車輛的仿真結果以及CCRb工況下本車初速度為50 km/h接近前方40 m處緊急制動車輛的仿真結果。 3.2.1CCRs工況下接近靜止車輛的仿真結果 本車以50 km/h的初速度接近前方100 m處靜止車輛,兩車最小安全距離d0設置為3 m,仿真步長為0.001 s。仿真結果如圖13所示。 從圖13可以看出,預警模塊在仿真時間t=4.2 s時進入一級預警狀態。當t=5.7 s時,自動緊急制動系統控制本車進入一級制動狀態,期望加速度由0變為-4 m/s2,輸出的制動主缸壓力由0升至2.7 MPa,節氣門開度降為0,本車開始進行勻減速直線運動;當t=6.2 s時,自動緊急制動系統控制本車進入二級制動狀態,期望加速度降至-8 m/s2,控制器將制動主缸壓力調整為5.4 MPa,本車實際加速度在期望加速度周圍上下小范圍波動;在t=7.8 s時,本車剎停且與前車的相對距離為3.2 m。這說明本文提出的控制策略可以較好地實現CCRs工況下預警/分級制動功能。 圖13 接近前方靜止車輛(CCRs)仿真結果 3.2.2CCRb工況下接近緊急制動車輛的仿真結果 本車行駛速度為50 km/h,正前方40 m處的前車速度為50 km/h,突然以-4 m/s2加速度進行減速行駛直至停止。兩車最小安全距離d0設置為3 m,仿真步長為0.001 s。仿真結果如圖14所示。 從圖14可以看出,預警模塊在仿真時間t=3.1 s時進入一級預警狀態,當自動緊急制動系統采取一級制動時,預警解除。當t=4.6 s時,自動緊急制動系統控制本車進入一級制動狀態,自動緊急制動系統開始進行一級制動,輸出的期望加速度為-4 m/s2,制動主缸壓力為2.7 MPa,此時系統控制汽車的節氣門開度降為0,本車保持勻減速直線運動;在t=5.1 s時,觸發二級制動,系統輸出-8 m/s2的期望加速度,制動主缸壓力為5.4 MPa,車輛以8 m/s2的減速度進行勻減速直線運動。t=6.8 s后兩車相對距離為3.2 m,本車停止。仿真結果表明,本文提出的控制策略可以較好地實現避撞功能。 圖14 接近前方緊急制動車輛(CCRb)仿真結果 提出了安全距離-時間模型相結合的汽車緊急制動系統分層控制策略。考慮了相鄰車道前方車輛換道工況,設計了換道判斷模糊控制器,以碰撞時間為依據進一步構建了本車前方危險目標模糊判別控制器。基于有限狀態機與PID控制理論,設計了AEB系統上位與下位控制器。基于結合CarSim仿真環境與Simulink,進行了AEB系統動力學與控制器建模,針對CCRs工況接近前方靜止車輛與CCRb工況接近前方緊急制動車輛典型工況進行了仿真驗證,結果表明:本文提出的控制策略可以實現危險目標的準確判別、預警/分級制動以及避撞控制功能。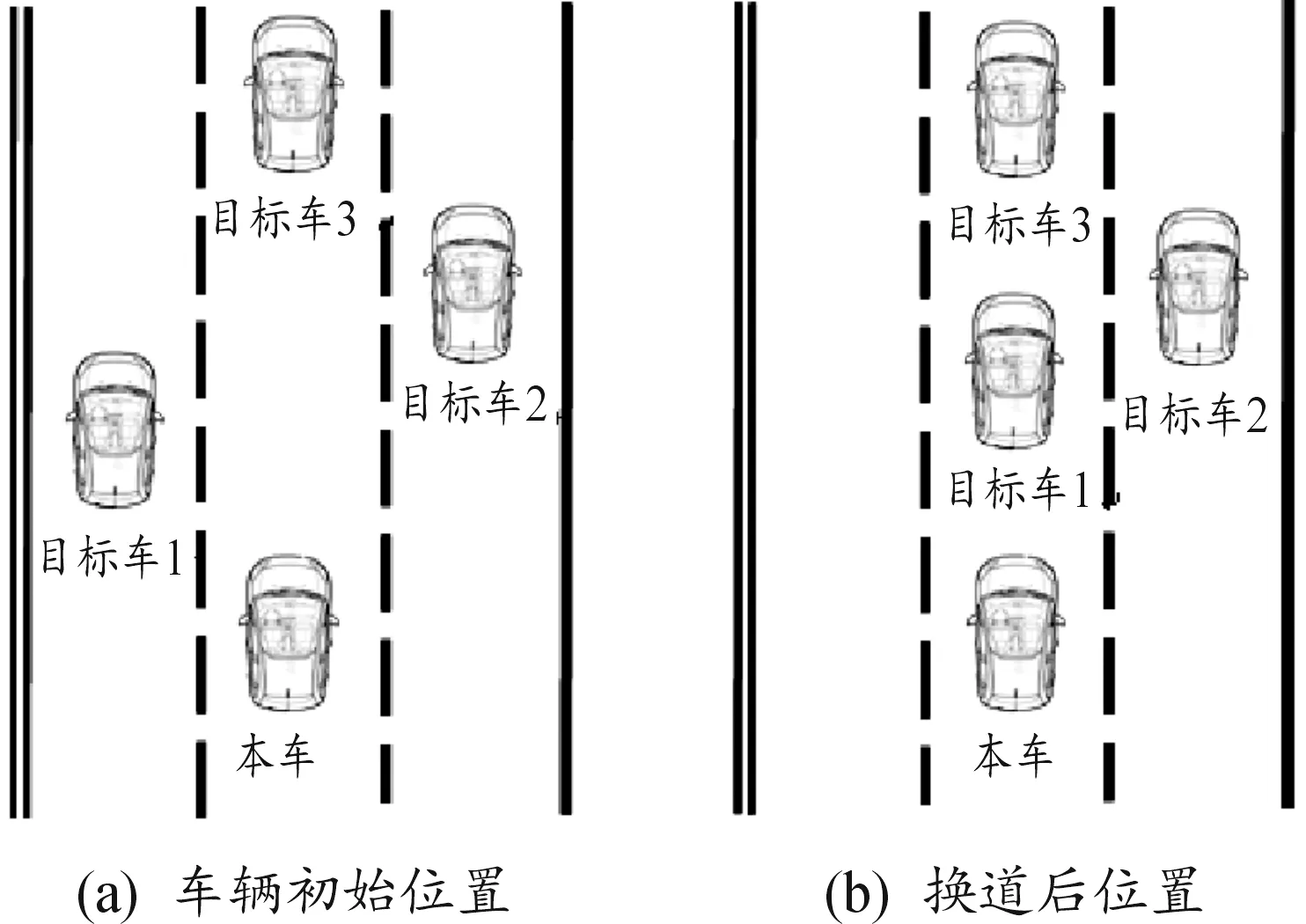
2.2 基于有限狀態機的上層控制器設計
2.3 汽車緊急制動系統下層控制器設計
2.4 車輛縱向動力學模型及逆向模型建立


3 汽車緊急制動分層控制仿真
3.1 危險目標模糊判別仿真結果

3.2 預警分級制動策略仿真結果
4 結論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58裝備制造技術(2019年12期)2019-12-25 03:06:46制造技術與機床(2019年10期)2019-10-26 02:47:06中國洗滌用品工業(2019年4期)2019-05-11 09:27:34鐵道通信信號(2018年5期)2018-06-28 03:06:24家庭影院技術(2017年9期)2017-09-26 03:41:45知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19通信電源技術(2016年6期)2016-04-20 06:21:32
