輪胎包容特性濾波下的主動懸架預瞄自抗擾控制研究
2022-02-18 08:29:44黃俊明
重慶理工大學學報(自然科學) 2022年1期
關鍵詞:模型
黃俊明,楊 國,楊 蓉
(廣西大學 機械工程學院, 南寧 530004)
預瞄主動懸架系統提前測量車輛前方的路面不平度,并將其用于控制主動懸架,從而能夠進一步提升車輛的行駛平順性[1-2]。
在多數預瞄主動懸架控制算法的研究中,主動懸架的預瞄控制問題被視為輸入時滯問題,并基于最優控制或魯棒控制設計預瞄控制器。這類控制器將車輛前方的路面不平度擴增為系統的狀態變量,利用即將輸入的路面不平度控制當前時刻的車輛動態[3-4]。路面上預瞄點的輸入時滯時間就是預瞄時間。處理輸入時滯的常用方法有Padé近似法和離散狀態空間法,前者將單個預瞄點的不平度擴增為系統的狀態變量[4],而后者將預瞄路面上一系列點的垂向速度擴增為系統的狀態變量[5-6]。取定的預瞄時間決定了控制器的結構,當車速改變時,預瞄點的輸入時間和采樣間隔改變,控制系統難以適應不同的車速。陳長征等[7]在時變車速條件下設計了H∞控制器對1/4車輛模型進行預瞄控制,但其控制器的設計過程復雜,需要設較多的簡化條件和數學假設。
模型預測控制是實車應用較多的控制算法,其控制策略仍是利用未來的路面輸入計算當前時刻的控制力。G?hrle等[8-9]在波長為35 m和50 m的低起伏路面條件下進行固定車速的仿真試驗和實車試驗,在實車試驗中預瞄路面信息需要提前儲存在硬件中。Ni T 等[10]采用模型預測控制實現了重型越野救援卡車的主動懸架預瞄控制,該系統能夠有效減少車身的垂向位移、俯仰角和側傾角,但未給出車身振動加速度的試驗結果。模型預測控制會面臨計算量過大的問題,進而無法滿足主動懸架對實時性的要求,因此,有研究將預測控制退化為查表控制[11]。而且當車速改變時,模型預測控制需要改變預測時域的長度,并對預瞄路面進行重新采樣[12]。
為了使預瞄主動懸架控制系統能夠適應不同的車速,同時考慮實際輪胎對路面具有濾波作用,由預瞄傳感器測量得到的路面不平度并非懸架將要受到的垂向激勵,本文將預瞄控制問題作為前饋補償問題[13],提出了一種以懸架動行程為被控量的預瞄控制方法,并采用響應速度快、抗干擾能力強、且不依賴于被控對象精確的數學模型的自抗擾控制(active disturbance rejection control,ADRC)設計了控制系統。為了驗證預瞄控制系統的有效性以及考慮輪胎包容特性的必要性,在脈沖輸入路面和隨機路面條件下進行了仿真對比試驗。
1 車輛模型
1.1 整車7自由度模型
整車7自由度主動懸架模型如圖1所示,坐標系OXYZ與車身固結,原點O位于車身質心,X軸指向車輛前進方向,Y軸指向駕駛員左側,Z軸鉛垂向上。將車身視為剛體,車身質量為mb,質心的垂向位移為zb。車身的俯仰轉動慣量是繞Y軸的Iy,俯仰角為φ。車身的側傾轉動慣量是繞X軸的Ix,側傾角為θ。前軸、后軸到質心的距離分別為Lf和Lr。前軸輪距為Bf,后軸輪距為Br。前懸架的非簧載質量以mf表示,后懸架的以mr表示。前、后懸架減振器的阻尼分別為Csf和Csr。前、后懸架彈簧剛度分別為Ksf和Ksr。輪胎簡化為點接觸彈簧模型,并忽略輪胎阻尼,前、后車輪的輪胎剛度分別用Ktf和Ktr表示。以Zi表示車身與懸架連接點處的垂向位移,zui表示非簧載質量的垂向位移,fi表示執行器輸出的控制力,qi表示輪胎的路面輸入,其中i=1,2,3,4,分別對應車輛的左前、右前、左后和右后4個方位。非簧載質量位移和路面輸入以向上為正方向,而執行器控制力以壓縮懸架行程的方向為正。車輛模型參數如表1所示。
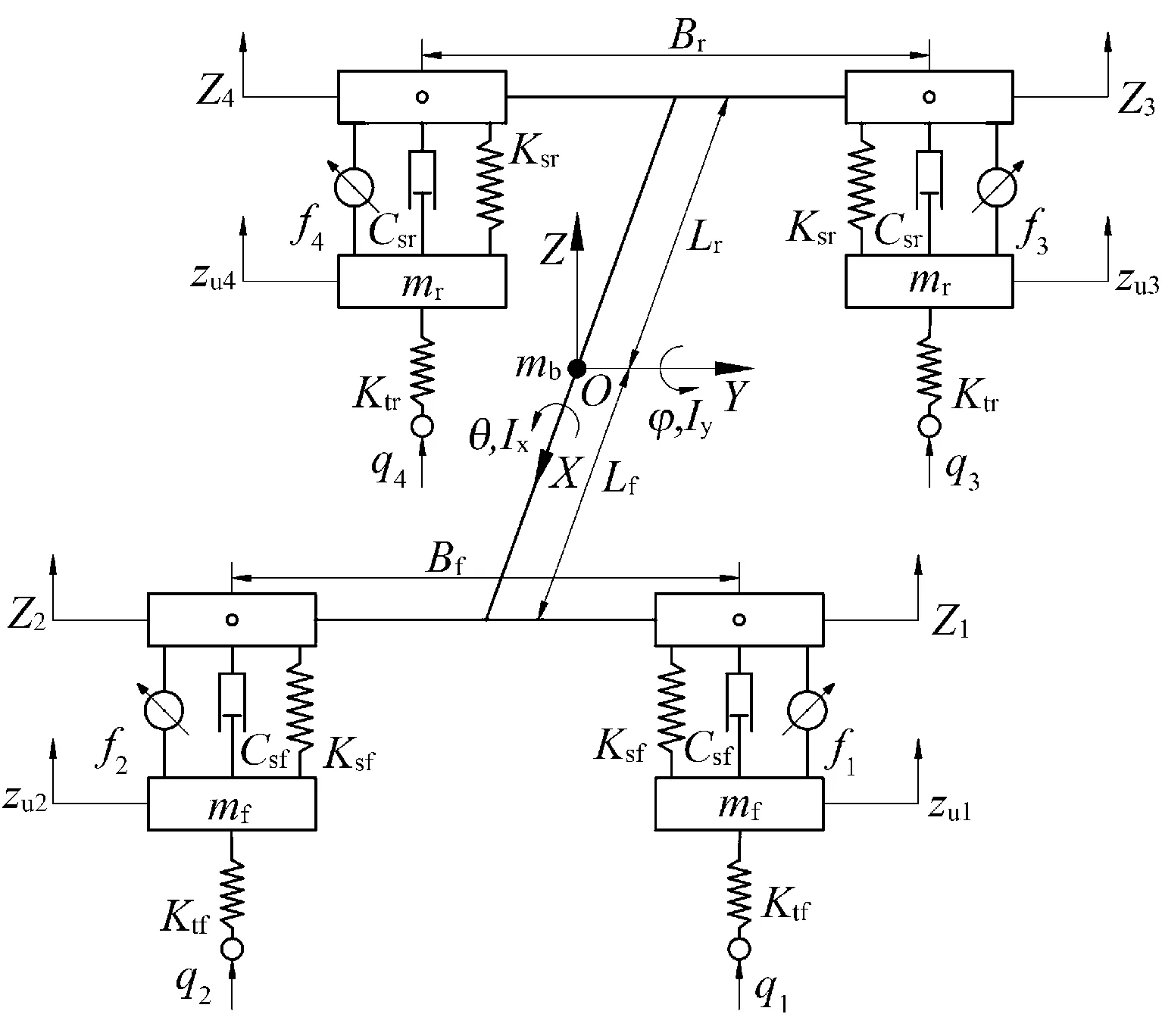
圖1 整車7自由度模型示意圖
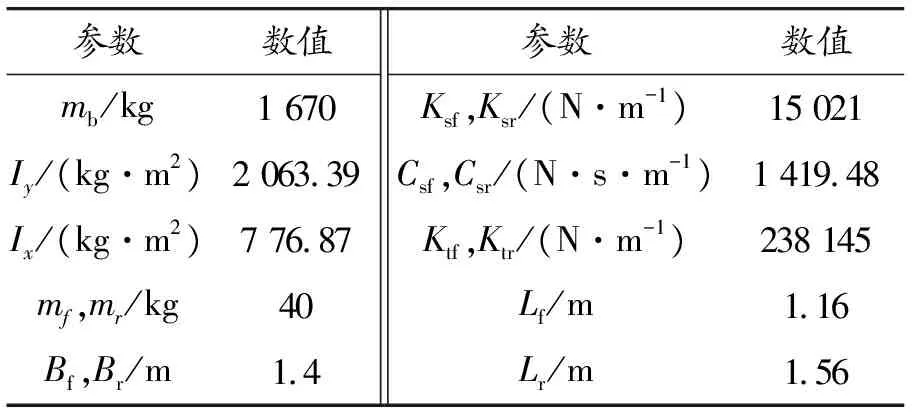
表1 車輛模型參數
設懸架系統的彈簧力和阻尼力之和為:
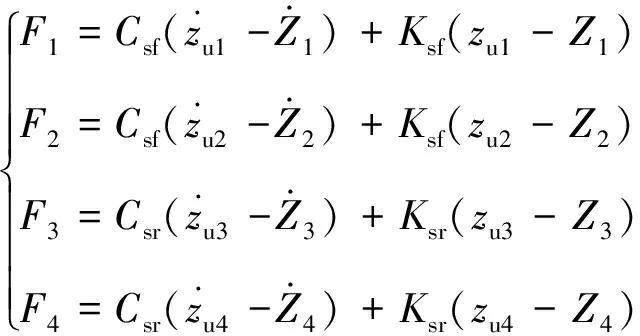
(1)
由牛頓第二定律,車身的垂向運動、俯仰運動和側傾運動的動力學方程分別為:
(f1+f2+f3+f4)
(2)

Lf(f1+f2)-Lr(f3+f4)
(3)

(4)
非簧載質量的垂向動力學方程為:

(5)
車身與懸架連接點處的垂向位移為:
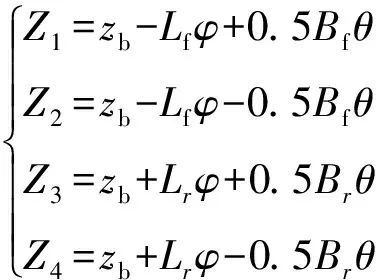
(6)
以式(1)~(6)建立整車7自由度主動懸架模型。令整車主動懸架模型中的控制力f1、f2、f3和f4為零,則得到整車7自由度被動懸架參考模型。該模型將用于計算車身的垂向位移補償量。
1.2 懸架動行程動力學分析

對于左前車身與懸架連接點,根據剛體運動學中加速度的合成定理,由車身俯仰運動產生的切向加速度和法向加速度分別為:
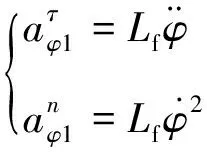
(7)

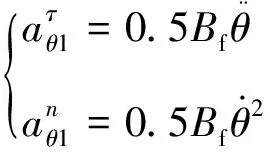
(8)
將車身質心垂向加速度、俯仰和側傾運動產生的加速度合成,然后投影到車身坐標系的Z軸,得到4個車身與懸架連接點處的垂向加速度表達式:
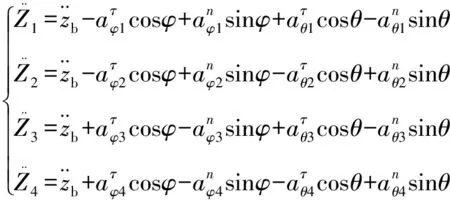
(9)
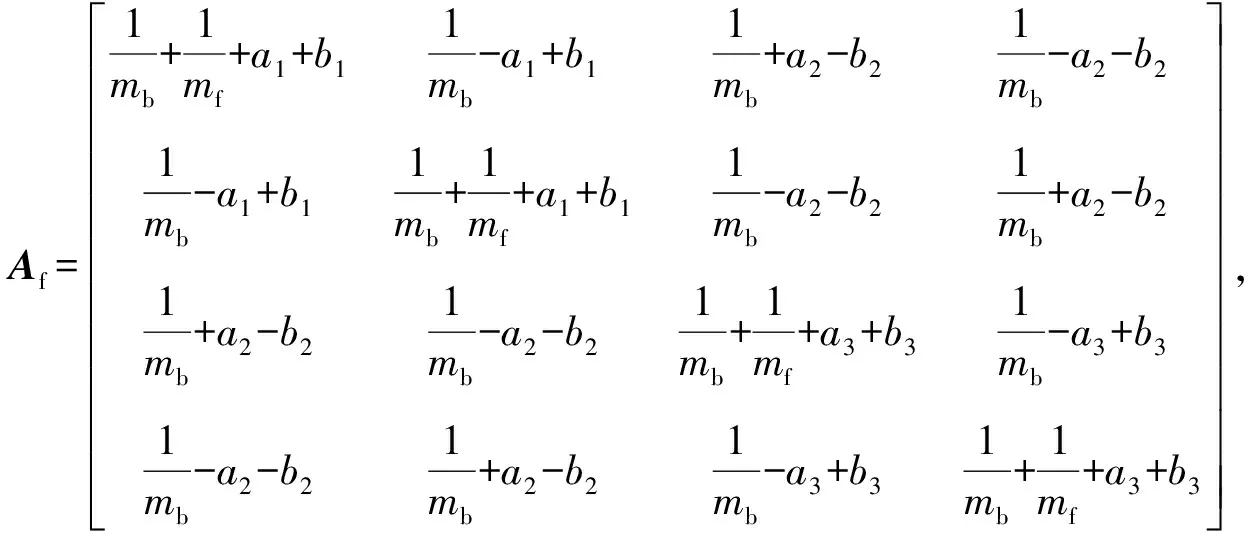
將式(5)整理系數后減去式(9),再將式(2)(3)(4)代入,可得懸架動行程的動力學方程,借助Matlab的符號運算功能簡化計算,得到具體表達式為:
(10)

(11)
(12)
設前懸架、后懸架的控制力增益系數分別為bf和br,取主對角線上的元素,則有:
(13)
2 預瞄主動懸架控制系統
2.1 輪胎包容特性模型
輪胎包容特性是指路面對輪胎的垂直作用被輪胎濾波的特性[14]。車輛平順性研究中常用的輪胎與路面的接觸模型是單點接觸模型,適用于0.1~2 Hz且路面波長大于3 m的路面輸入[15]。因此,短波長不平路面不能直接輸入車輛模型,應輸入經過輪胎濾波的有效路形。本文使用彈性滾子模型對任意的短波長不平路面進行彈性濾波和幾何濾波,從而得到有效路面輸入。
郭孔輝等[14]給出了彈性滾子模型的建模假設和計算有效路形的聯合表達式,但規定了真實路形曲線的起點高度必須是零。本文沿用其建模計算方法,推導出起點高度任意的聯合表達式。輪胎計算坐標系XOZ如圖2所示,全局坐標X軸沿路面縱向,原點O是這段路面的計算起點,Z軸指向鉛垂方向,局部坐標x平行于全局坐標X且方向相同。車輪滾動方向與X軸相同,粗實線表示輪胎輪廓,虛線是其圓形輪廓的延長線,形狀任意的真實路面曲線Q(X)用細實線表示。點C是車輪的中心,它是一維局部動坐標x軸的原點。W表示車輪中心的高度,C(X,W)表示車輪中心的位置。以r0表示輪胎半徑,局部動坐標x用于檢索[X-r0,X+r0]內各個點的真實路面高度Q(X+x)。如輪胎接地印跡上的一點A,它的局部坐標是xA,則點A的真實路面高度為Q(X+xA)。
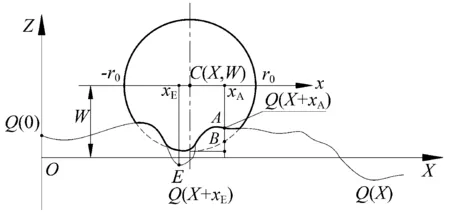
圖2 輪胎彈性滾子模型計算坐標系
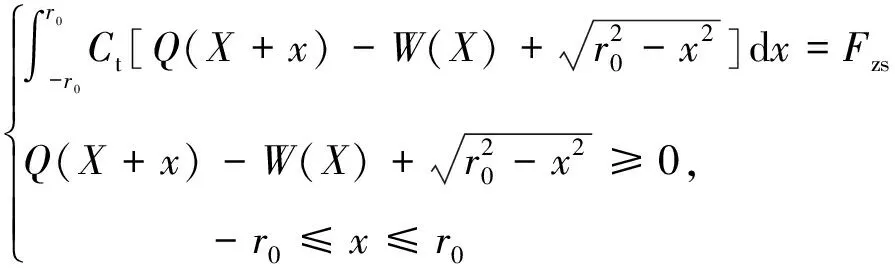
在靜態或準靜態條件下,輪心軌跡就是有效路形,因此求解的目標變量是車輪中心高度W。輪胎接地印跡內各點變形產生的合力與輪胎受到的垂向載荷平衡。當車輪中心的橫坐標是X,車輪中心高度記為W(X),它通過垂向力的平衡條件求解。以ΔZ(X,x)表示[X-r0,X+r0]輪胎任一點的垂直變形量,且ΔZ(X,x) ≥ 0。例如,圖2中輪胎上A點的垂直變形量為:
(14)
路面上的E點未與輪胎接觸,輪胎對應的垂直變形量ΔZ(X,xE) = 0。輪胎各點的垂直變形量是非負數,當計算得到某一點的變形量ΔZ(X,x) < 0,則令其等于0。因此輪胎在[X-r0,X+r0]各點的變形量為:
(15)
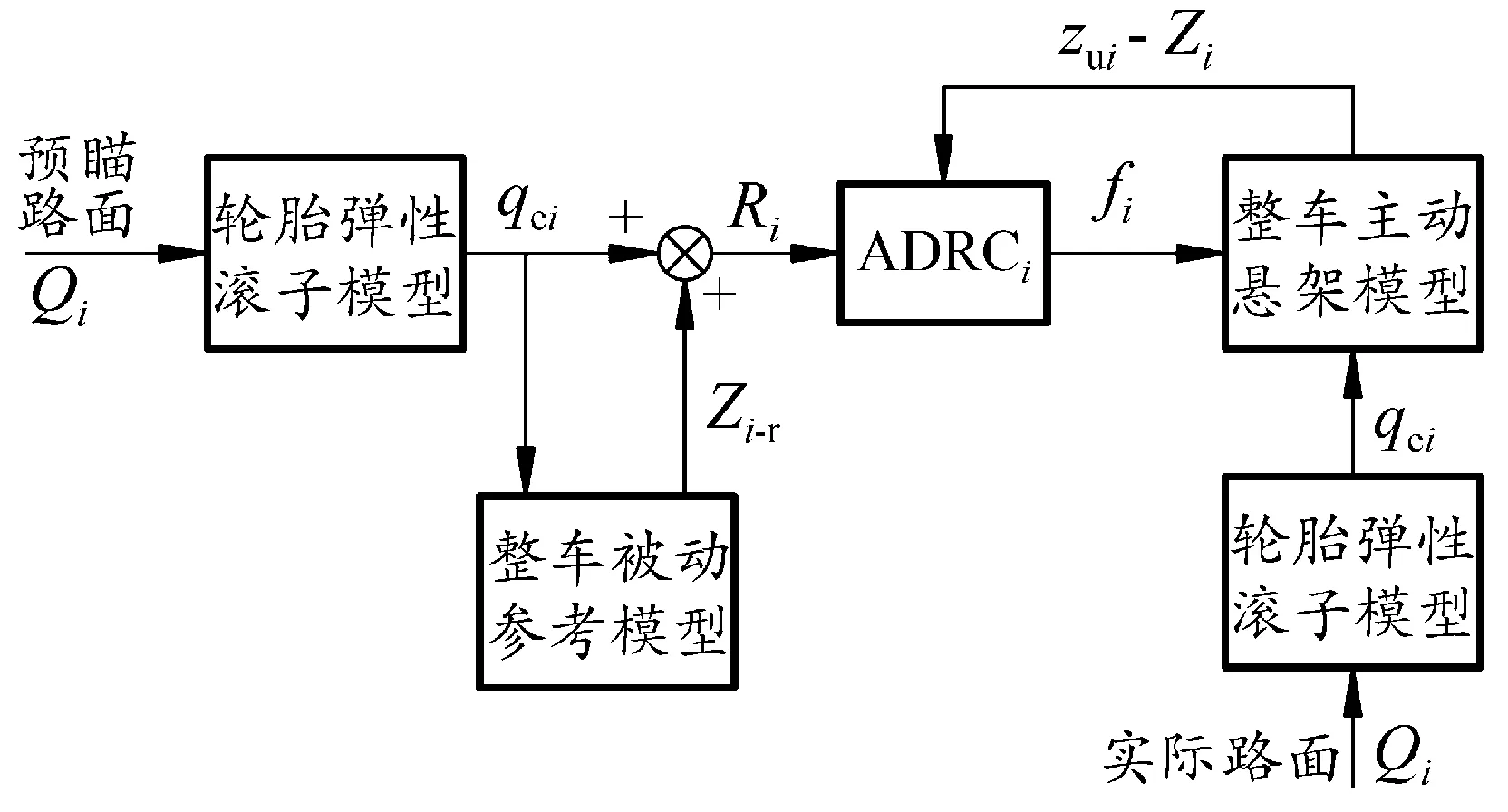
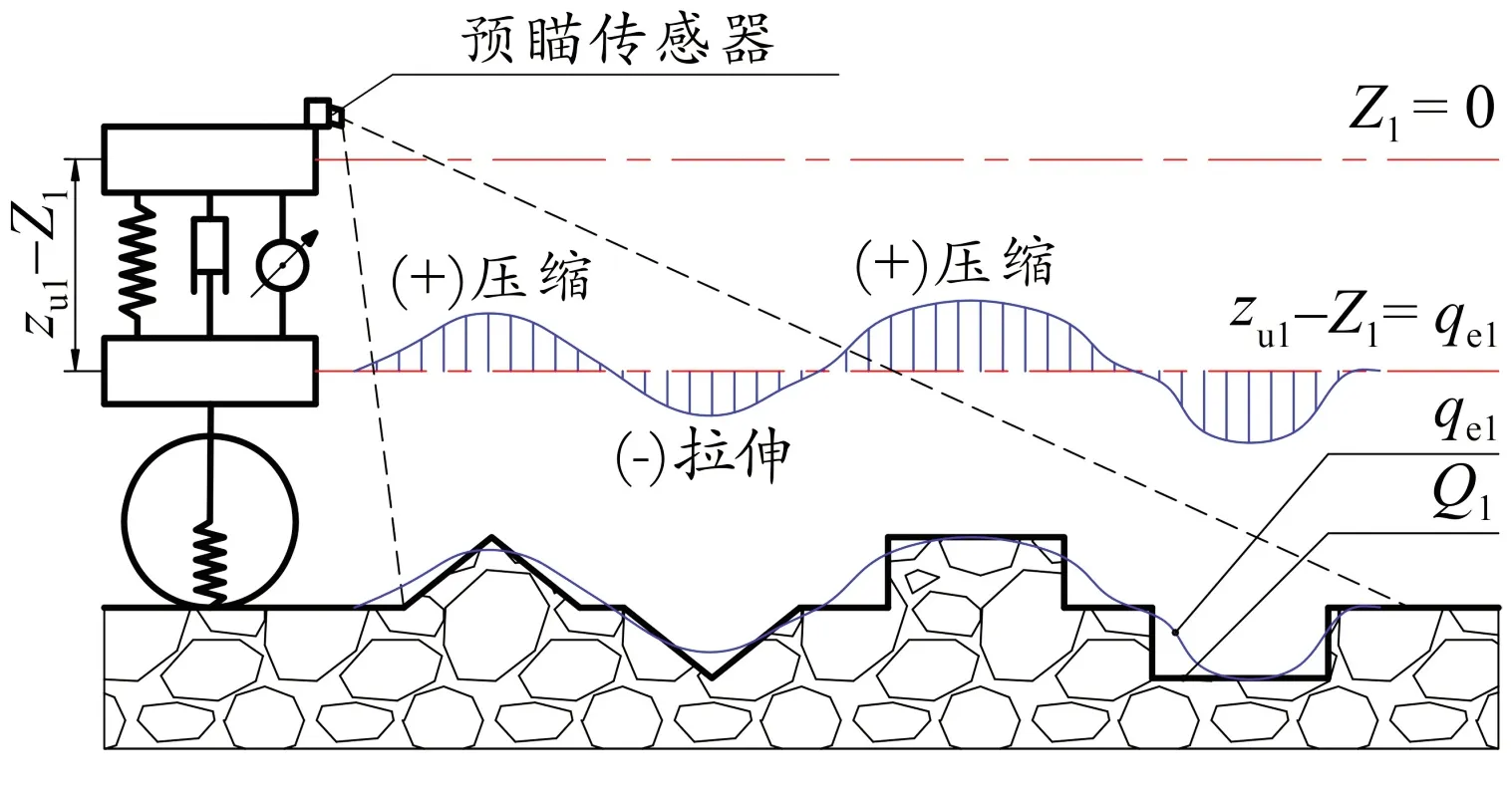
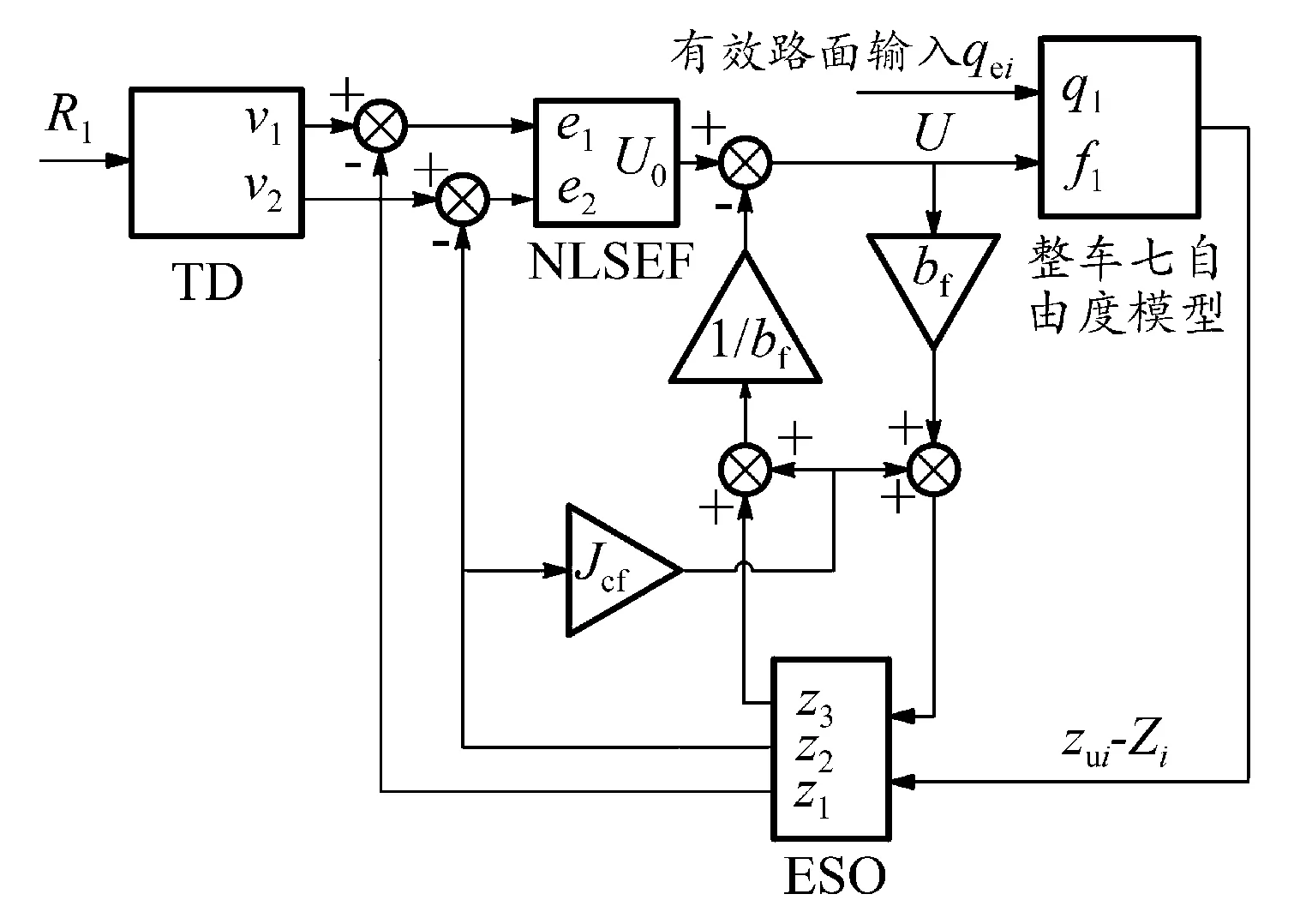
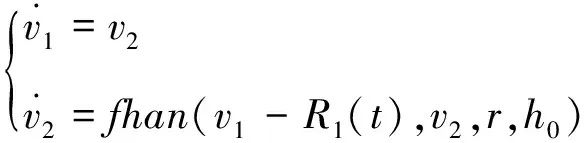
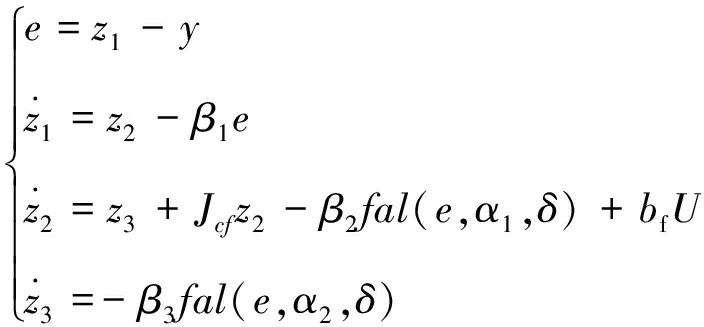
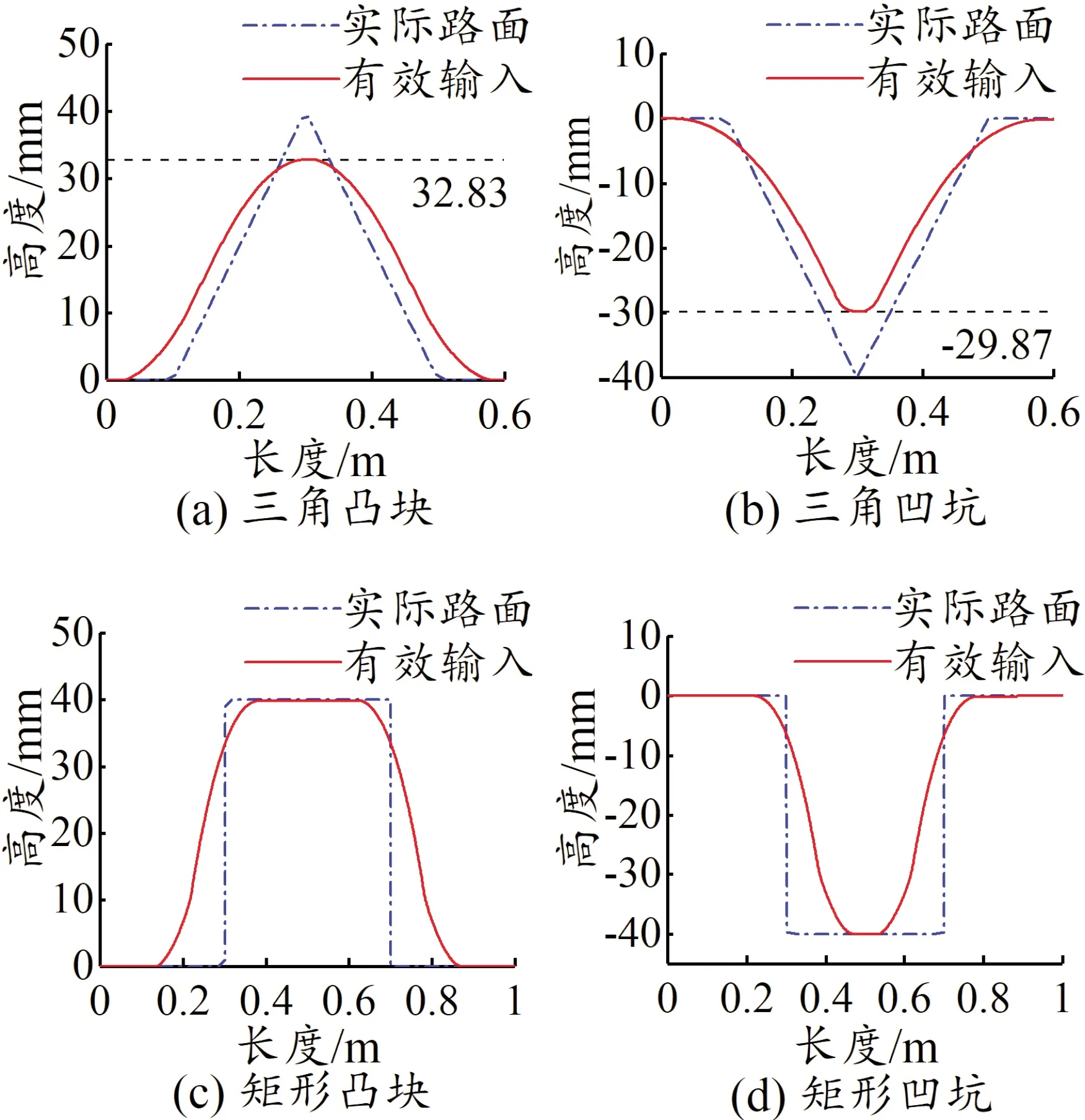
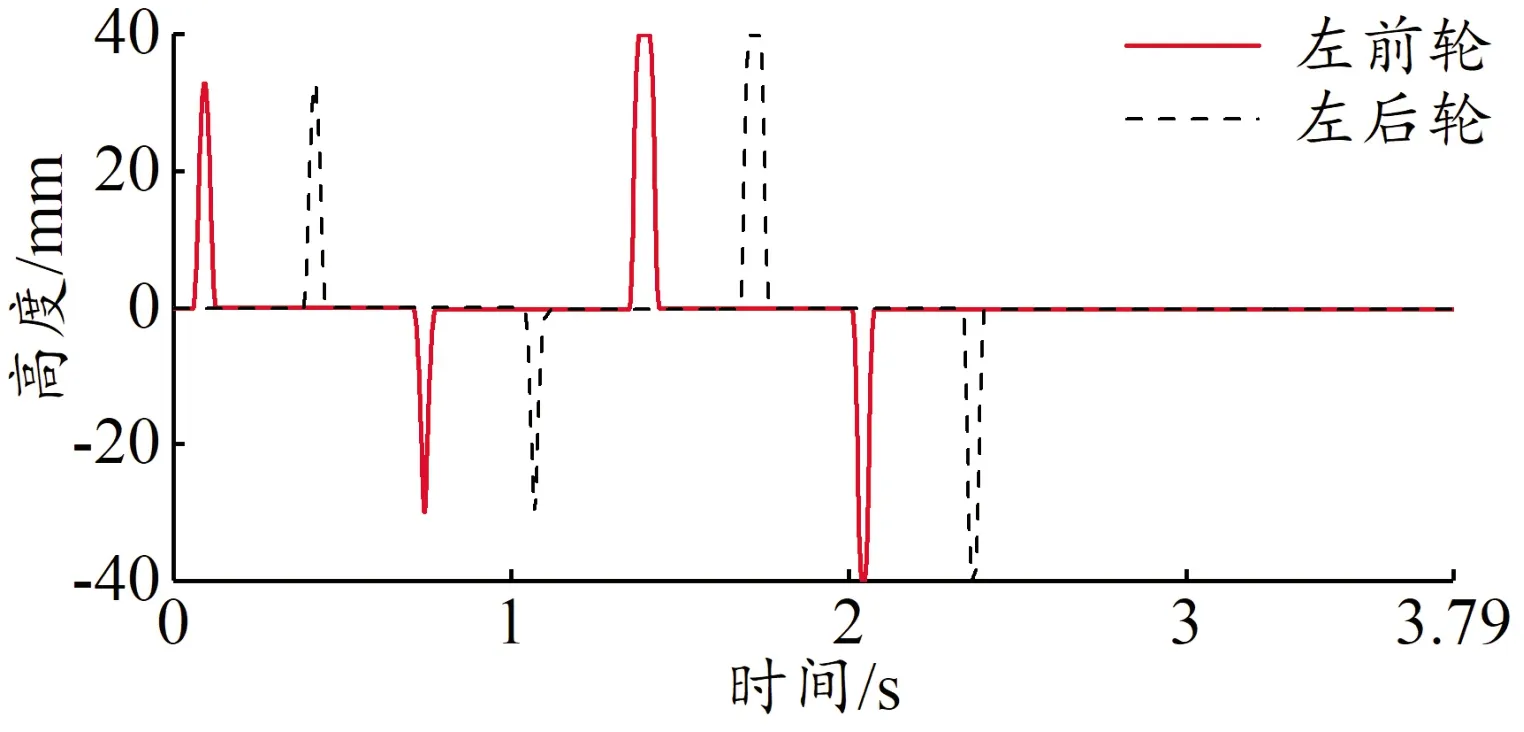
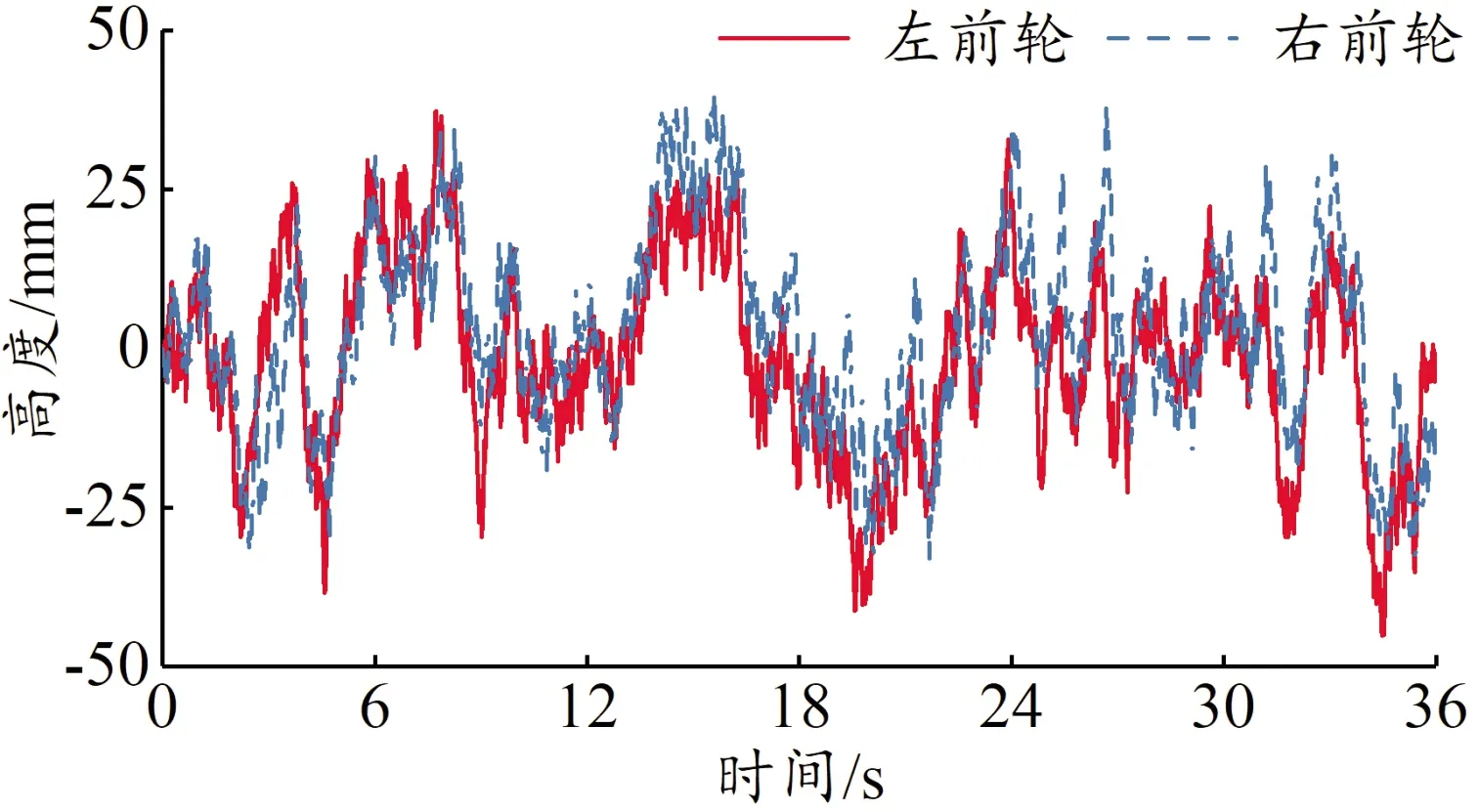
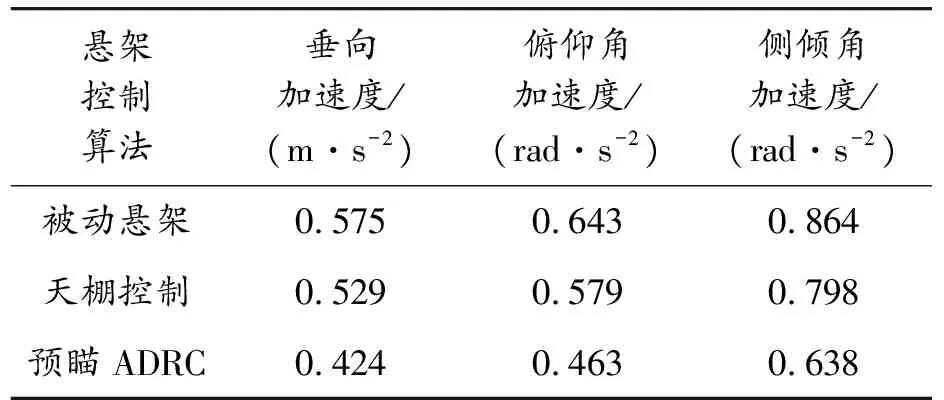
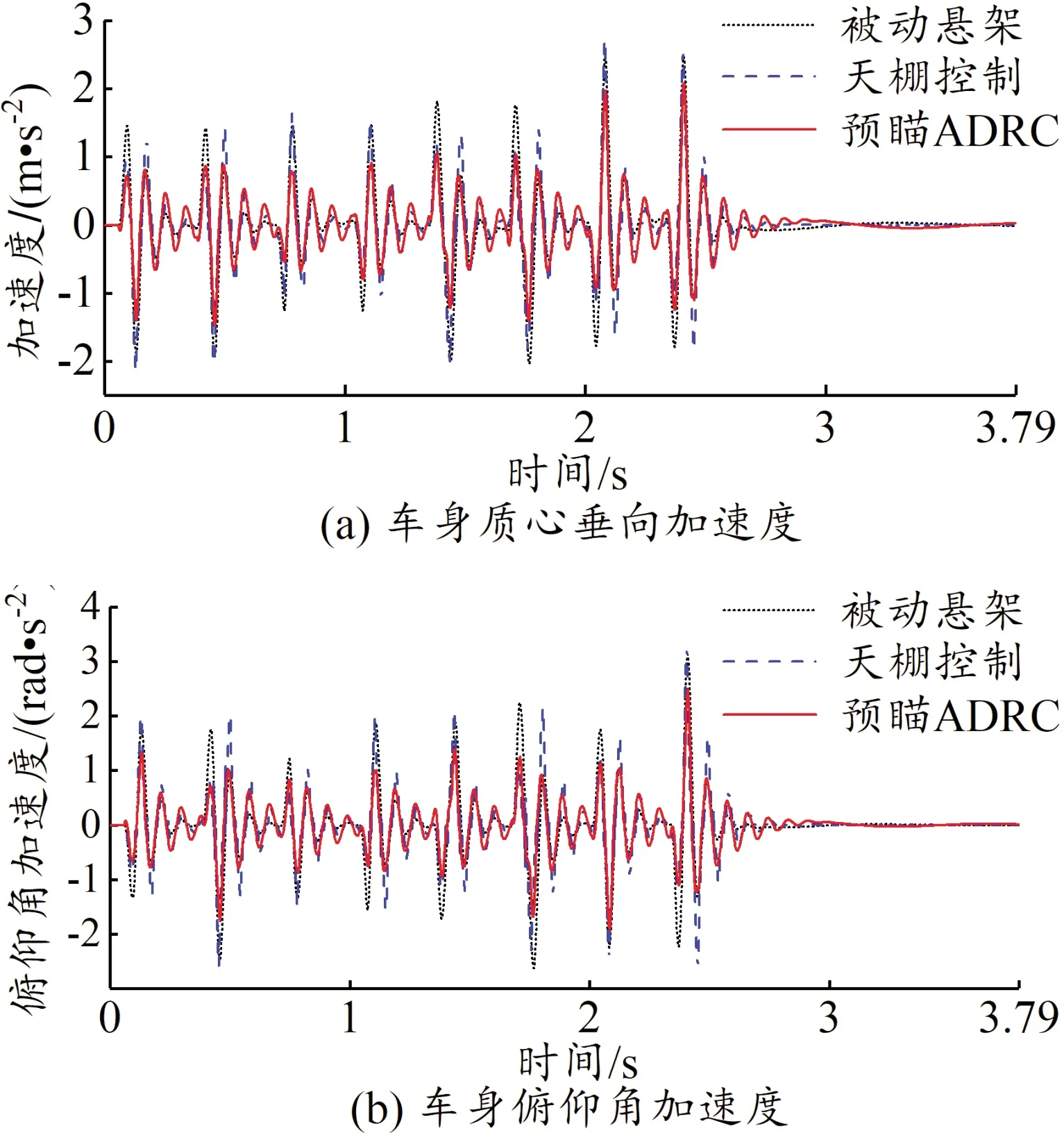
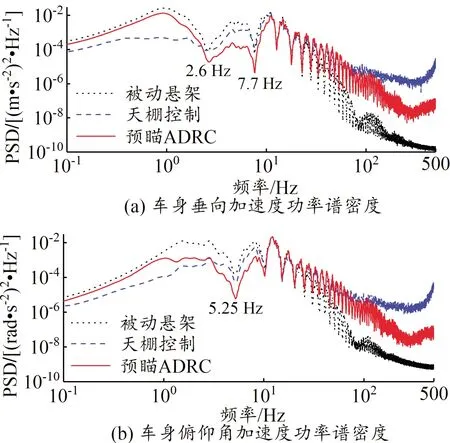
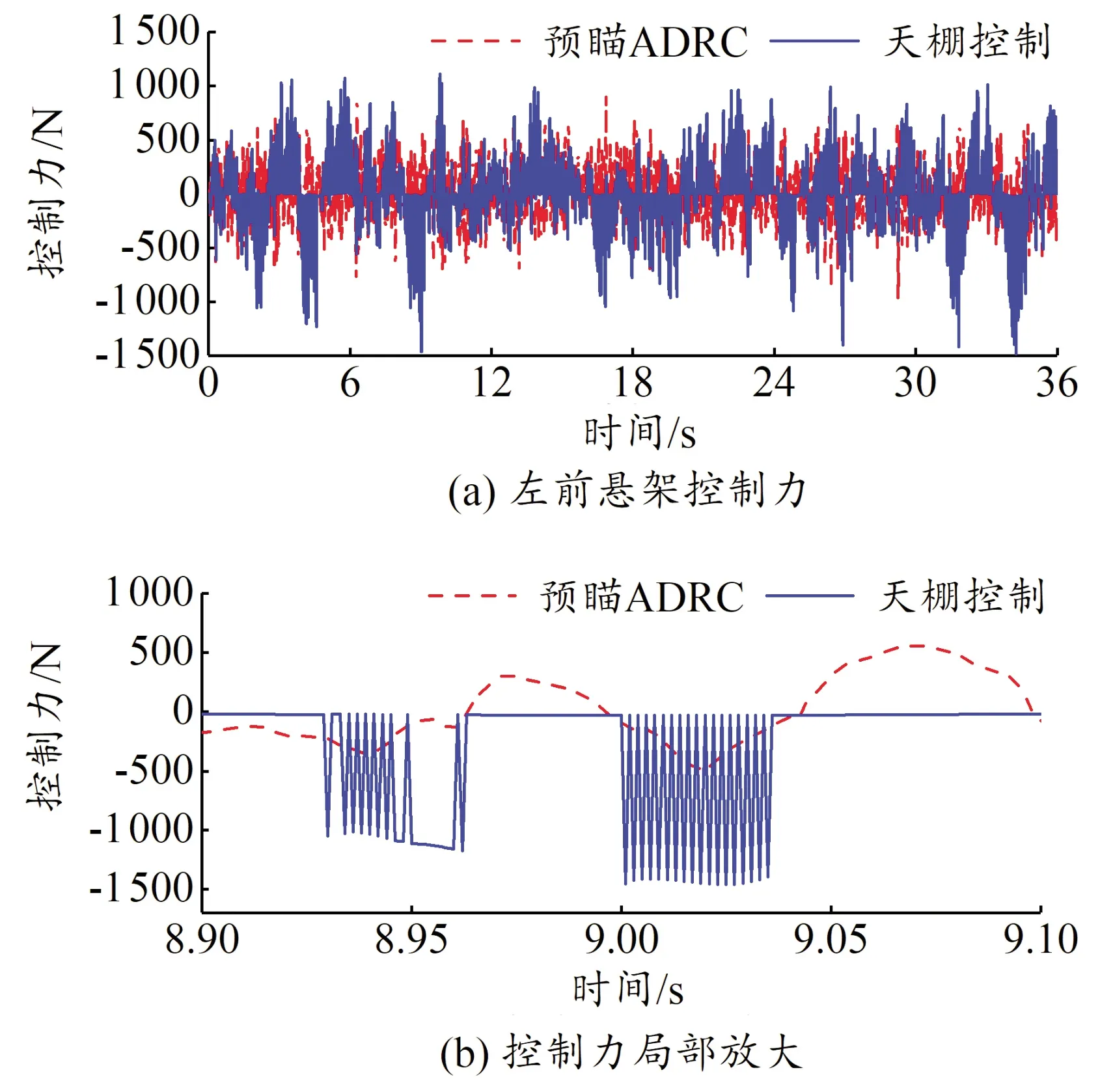
式中,-r0 (16) 將式(15)整理后代入式(16),得: (17) 式(17)中的目標變量W(X)需要使用數值方法編程求解,得到一個點的車輪中心高度。改變X,令其遍歷真實路面曲線Q(X),求解出對應的車輪中心軌跡曲線W(X)。以原點處的值W(0)為基準,則有效路形曲線Qe(X)由車輪中心軌跡曲線W(X)向下平移得到:Qe(X)=W(X)-W(0)。這樣得到的有效路形曲線Qe(X)便以原點的有效路面高度為基準。根據不同的行駛車速u,將Qe(X)采樣成有效路面輸入的時間序列qe(t)。 假設已經準確獲得車輛前方的路面不平度信息。預瞄主動懸架控制系統如圖3所示。圖中,Ri是4個懸架動行程的控制參考信號,Zi-r是車身垂向位移補償量,Qi是實際路面輸入,qei表示各懸架的有效路面輸入,i=1,2,3,4。 圖3 預瞄主動懸架控制系統架構 以左前懸架的1/4車輛模型為例,說明懸架動行程預瞄控制的原理,如圖4所示。圖中,zu1-Z1是左前懸架動行程,Z1是左前簧載質量的垂向位移。在理想情況下,當車輛駛過不平路面而車身的垂向位移保持為零時,車輛獲得最佳的行駛平順性。此時,懸架動行程等于有效路面輸入減去輪胎壓縮量,但由于輪胎剛度遠大于懸架剛度,忽略輪胎變形則有近似關系zu1-Z1≈qe1。如果懸架動行程能根據路面不平度主動壓縮懸架以退讓路面沖擊,或拉伸懸架以充分支撐車身,則可減少車身的振動加速度。但由于實際車身存在垂向運動,需要補償車身姿態偏離平衡位置帶來的影響。利用已知的預瞄路面信息,在車身將要上拋的地方增大懸架壓縮量,在車身將要下沉的地方增大懸架伸長量。這項垂向位移補償量可以通過一個具有相同車輛參數的被動懸架整車參考模型獲得。則圖3中懸架動行程的控制參考信號為 Ri=qei+Zi-r,i=1,2,3,4 (18) 式中:qe3和qe4分別由qe1和qe2根據軸距延遲(Lf+Lr)/u得到。 圖4 懸架動行程預瞄控制的原理 車輛前方的路面不平度被轉化為懸架動行程的控制參考信號,這是預瞄路面信息的預處理過程。當車輛行駛至對應的位置時,自抗擾控制器根據控制參考信號使懸架壓縮或拉伸至特定的行程,從而補償車身的運動,抵消車身的振動。該預瞄控制方法預知懸架應作出何種響應,然后通過自抗擾控制器進行跟蹤控制。 而在現有的預瞄控制研究中,通常將車輛前方的路面不平度作為系統的狀態變量,用未來時刻的路面輸入控制當前時刻的車輛動態。這類控制系統在固定的預瞄時間下,對車輛進行提前控制,導致控制系統難以適應不同的車速。 預瞄主動懸架控制系統有4個ADRC控制器,其中左前懸架ADRC控制器結構如圖5所示。自抗擾控制器由跟蹤微分器(tracking differentiator,TD)、非線性狀態誤差反饋(nonlinear state error feedback,NLSEF)和擴張狀態觀測器(extended state observer,ESO)組成。其中TD能快速跟蹤控制參考信號,產生一個跟蹤信號v1和一個跟蹤微分信號v2,并能濾除控制參考信號中的噪聲。NLSEF根據系統狀態誤差e1和狀態微分的誤差e2產生反饋控制力U0。ESO根據系統輸出量和控制量U,實時估計系統未建模動態、內部擾動和外部擾動,將其視作系統總擾動進行補償,使被控對象在形式上構成一個積分器串聯型系統[16]。 圖5 左前懸架ADRC控制器 考慮車輛懸架的左右對稱性,同一車軸的兩個控制器具有相同的參數。而前懸架和后懸架的ADRC控制器具有相同的結構,僅部分參數不相同。因此,將以左前懸架為例給出自抗擾控制器的設計過程。 跟蹤微分器的連續形式如下: (19) 式中:R1(t)是左前懸架動行程的控制參考信號;函數fhan(v1-R1(t),v2,r,h0)是最速控制綜合函數;參數r是加速度因子,其數值越大則無超調地跟蹤參考信號的速度越快;h0是濾波因子,數值越大則對參考信號中的噪聲越不敏感,但數值過大會導致TD的信號延遲增大。為了減少跟蹤信號的延遲,增加控制器的快速性,取r=40,h0=0.001。 fhan(v1-R1(t),v2,r,h0)的具體表達式如下[17]: (20) 其中: sign是符號函數,fsg是區間函數,fsg(x,d)=0.5[sign(x+d)-sign(x-d)]。 非線性狀態誤差反饋使用fal(e,α,δ)作為非線性增益函數,其表達式為: (21) 式中:δ是fal函數的線性區間長度的一半;α為非線性因子,當0<α<1時,fal函數具有小誤差、大增益,大誤差、小增益的特性。反饋控制力U0按下式計算: U0=KN1fal(e1,0.5,0.01)+ KN2fal(e2,0.25,0.01) (22) 式中:KN1和KN2是誤差反饋增益系數。增益過小,會使控制器振蕩,增益過大,則使總擾動補償相對減弱,折衷取KN1=150,KN2=480。 (23) 式中:f1(x1,x2,t,w)表示系統未知擾動,包含未建模動態、耦合作用和外部擾動,其中w是未知的擾動變量;f0(x1,x2)是由懸架動行程動力學方程獲得的系統模型已知動態,其表達式為: f0(x1,x2)=Jsfx1+Jcfx2 (24) 如果ESO包含系統模型已知動態,則其估計系統狀態和未知擾動的快速性和準確性將優于系統模型完全未知的情形[18]。令z1和z2分別估計x1和x2,而z3估計系統未知擾動,ESO的表達式為 (25) 系統已知動態f0(x1,x2)包含2項,但是ESO表達式中只含有與懸架相對運動速度有關的Jcf×z2一項。通常應盡可能將系統已知動態f0(z1,z2)用于設計ESO以提升其快速性和準確性,進而獲得更好的控制效果。但根據仿真試驗,ESO中包含完整的f0(z1,z2)會使控制器的參數穩定域變小,控制器容易出現振蕩。因此,不再以增強ESO的估計能力為目的,而是以獲得理想的懸架動行程控制律為目的設計ESO,使其僅包含Jcf×z2。此時,ESO不振蕩、收斂快,可將α1和α2取為較小值以提高ESO的快速性,α1=0.25,α2=0.125,δ=0.01。增益參數取較大值使估計信號快速、準確跟蹤被估計值,β1=380,β2=1 920,β3=950。 反饋控制力U0補償總擾動后得到控制力U: (26) 后懸架動行程控制器的結構與上述一致,只需將Jcf和bf分別替換成Jcr和br。除了這2項參數,前懸架和后懸架的控制器取相同的參數。 (27) 式中:i=1,2,3,4,分別表示車輛的4個懸架;CSH是天棚阻尼,其取值為最大阻尼Cmax或最小阻尼Cmin;&表示邏輯運算與。Cmax取值為25 200 N·s/m,以保證控制器能輸出足夠大的控制力且兼顧輪胎動載荷。Cmin值為500 N·s/m,以不使平順性惡化為依據。天棚阻尼主動控制力為: (28) 自抗擾控制器和天棚阻尼控制器設置2 000 N的控制力飽和限值。因為本文未指定執行器的類型,且重點在于驗證預瞄控制算法的有效性,這一限值保證控制力不會過大。 根據GB/T 4970—2009《汽車平順性試驗方法》中關于脈沖試驗凸塊的規定,設置一個橫截面為等腰三角形的凸塊,其底邊長度為400 mm,高為40 mm。以相同的尺寸設置一個等腰三角形凹坑。再分別設置一個矩形截面的凸塊和凹坑,矩形截面長400 mm,高40 mm。單個脈沖輸入路面經過彈性滾子模型計算后得到有效路面輸入,如圖6所示。輪胎包容特性減少了垂向輸入,延長了縱向作用距離,體現了輪胎的彈性濾波和幾何濾波效應。 上述4個脈沖輸入依次間隔5 m布置,使其間距大于軸距。脈沖輸入結束后是一段長14.6 m的平路,以充分記錄車輛脈沖響應,同時觀察控制器是否失穩。脈沖輸入路面經過彈性滾子模型計算后得到有效路面輸入,如圖7所示。脈沖輸入的車速為30 km/h,且只輸入左側車輪,右側路面輸入為0,目的是獲得車身側傾運動且便于分析。 圖6 單個脈沖輸入路面 圖7 脈沖輸入仿真路面 使用濾波白噪聲時域模型,建立左前輪的隨機路面輸入Q1(t): (29) 式中:u是仿真車速,m/s;nc是路面下截止空間頻率,0.011 m-1;n0是參考空間頻率,0.1 m-1;Gq(n0)是路面不平度系數,建立C級路面,取值為256×10-6m3;w(t)是均值為0且功率譜密度是1的理想單位白噪聲。考慮左右輪跡的相干性,根據文獻[22]的方法得到右前輪的隨機輸入。隨機路面長度為500 m,仿真車速為50 km/h,經過彈性滾子模型計算后,左前輪和右前輪的隨機輸入如圖8所示。 圖8 隨機輸入仿真路面 在脈沖輸入路面仿真中,車身質心垂向加速度、俯仰角加速度和側傾角加速度的均方根值如表2所示。天棚阻尼控制對車輛平順性的改善有限,垂向加速度、俯仰角加速度和側傾角加速度的均方根值比被動懸架減少8.04%、9.94%和7.73%。而預瞄ADRC主動懸架可使上述3項振動加速度的均方根值比被動懸架依次減少26.24%、27.91%和26.19%。 表2 脈沖輸入車身加速度均方根值 振動加速度的時域響應如圖9所示,天棚阻尼控制增大了車身振動加速度的最大值,而預瞄ADRC主動懸架可使垂向加速度、俯仰角加速度和側傾角加速度的最大值比被動懸架分別減少15.96%、20.75%和15.56%。預瞄ADRC主動懸架有效降低了車身振動加速度,提升了脈沖輸入路面的行駛平順性。 以左前懸架為例,預瞄ADRC使輪胎動載荷的最大值比被動懸架增加21.4%,而天棚阻尼控制使其比被動懸架增加17.87%。在被動、天棚阻尼控制和預瞄ADRC控制3種情況下,左前懸架的最大壓縮量分別為50.61、61.15和63.75 mm。雖然預瞄ADRC主動懸架系統使輪胎動載荷有所增大,并增加了懸架撞擊限位塊的風險,但考慮到路面輸入是脈沖凸塊和凹坑,上述影響難以避免。 圖9 脈沖輸入車身加速度時域響應 在隨機路面仿真中,天棚阻尼控制可使垂向加速度、俯仰角加速度和側傾角加速度的均方根值比被動懸架分別減少27.72%、24.07%和17.14%。而預瞄ADRC控制則可以使這3項均方根值比被動懸架依次減少27.82%、24.39%和27.86%。其中車身垂向加速度的時域響應如圖10所示。從圖10中可見,預瞄ADRC的加速度幅值明顯低于被動懸架。取均方根值接近的垂向和俯仰角加速度作功率譜密度估計,如圖11所示。預瞄ADRC使2.6~7.7 Hz的垂向振動有效減少,這一頻率范圍與平順性評價中關注的4~8 Hz接近,同時也使俯仰角振動在5.25 Hz有極小值。因此,預瞄ADRC的控制效果對提升行駛平順性更有利。 圖10 隨機輸入車身垂向加速度時域響應 天棚阻尼控制和預瞄ADRC控制的左前懸架控制力如圖12(a)所示。圖中天棚阻尼控制輸出了更大的控制力,其絕對值的最大值為1 483 N。而預瞄ADRC的最大控制力為975 N。局部放大觀察控制力第9 s附近的輸出,如圖12(b)所示,在第9~9.036 s天棚阻尼控制力具有18個完整的三角波,對應的頻率為500 Hz。天棚阻尼控制的開關特性導致其控制力具有高頻特性。這種控制力的高頻特性會作用于車身,使車身出現高頻振動。而預瞄ADRC輸出的控制力是連續的,其幅值更小,變化更緩慢。因此,預瞄ADRC要求的執行器響應帶寬更低、最大控制力更小。 圖11 車身振動加速度功率譜密度 圖12 天棚阻尼控制與預瞄ADRC控制力對比 保持控制器的參數不變。設仿真車速為5~80 km/h,間隔5 km/h,共16個仿真車速。將預瞄路面信息的預處理分為2種情況,使用輪胎彈性滾子模型和不使用輪胎彈性滾子模型,后者在圖中標注為“NT預瞄ADRC”。 在脈沖輸入路面仿真中,車身質心垂向加速度的均方根值如圖13所示。有、無彈性滾子模型所得到的控制效果區別不大,當車速大于40 km/h之后幾乎無區別。其原因是單個脈沖輸入的時間短、變化劇烈,路面局部的形狀差別對控制參考信號的影響較小。再經過跟蹤微分器濾波,局部形狀差別的影響進一步減小。車身俯仰和側傾的角加速度均方根值具有相同的趨勢和相似的結果。 圖13 脈沖輸入車身垂向加速度均方根值 在隨機路面仿真中,車身振動加速度的均方根值如圖14所示。 圖14 隨機輸入車身振動加速度的均方根值 不考慮輪胎包容特性,不使用輪胎彈性滾子模型計算控制參考信號,則會在車速5 km/h時使平順性惡化,且導致垂向加速度、俯仰角加速度和側傾角加速度的均方根值在各車速中都大于考慮輪胎包容特性的預瞄ADRC。對于長度為500 m的隨機路面,預瞄路面的形狀差別不再是局部的,此時預瞄控制算法應考慮輪胎包容特性。 根據圖13 和圖14可知,本文提出的預瞄ADRC算法能在不同車速和路面輸入條件下有效減少車身振動加速度。同一組控制器參數可適用于不同車速和路況,且預瞄控制律不依賴于車速。在預瞄主動懸架控制中考慮輪胎包容特性對路面的濾波作用可有效提升平順性控制效果。 本文提出了一種以懸架動行程為被控量的預瞄主動懸架控制方法,并基于自抗擾控制設計了控制系統。在脈沖輸入路面和隨機路面條件下進行了仿真試驗,結果表明:預瞄自抗擾控制能夠有效減少車身的振動加速度,其控制效果優于天棚阻尼控制。在5~80 km/h的車速范圍內,對比了預瞄路面的預處理是否考慮輪胎包容特性對控制效果的影響。仿真結果表明:在脈沖輸入路面條件下,輪胎包容特性對預瞄控制的影響很小;而在隨機路面條件下,考慮輪胎包容特性能提升預瞄主動懸架對振動加速度的控制效果。 本文所設計的預瞄控制系統能夠以相同的結構和參數適應不同的車速和路況,有效地提升了車輛的行駛平順性。
2.2 預瞄主動懸架控制系統架構
3 自抗擾控制器的設計
3.1 跟蹤微分器
3.2 非線性狀態誤差反饋
3.3 非線性擴張狀態觀測器

4 仿真環境及結果分析


4.1 建立仿真路面
4.2 脈沖輸入路面仿真
4.3 隨機路面仿真

4.4 輪胎包容特性對預瞄控制的影響


5 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
