基于螺旋理論對4-URU并聯機構自由度分析*
2022-02-18 08:39:04王遠
南方農機 2022年4期
王 遠
(1.山西工程職業學院機械電子工程系,山西 太原 030009;2.中北大學機械工程學院,山西 太原 030051)
0 引言
近年來,并聯機器人的性能特點逐漸被機器人科研工作者所研究,和串聯機器人相比,并聯機器人因其突出的穩定性、剛度、承載能力以及精度等結構特性被應用到工業、航天、農業等領域[1]。并聯機器人首次進入大眾視野是Stewart提出的Stewart并聯機器人的形式,該機構的設計是用來對飛行員進行訓練的[2],后來被眾多研究者繼續開發出各種不同形式的并聯機構[3];Delta機器人是目前在工業生產線上應用較為廣泛的并聯機器人,具有四個自由度,由三條臂組成,這三條機械臂通過萬向關節和基座相連[4],根據該并聯機器人的結構組成及特點,可認為是平行四桿機構的延伸與拓展[5]。由于機器人的研究需要大量的數學理論作為研究基礎,隨著數學理論和機構學理論的不斷融合,使得串聯、并聯機器人的研究有了一系列不同程度的突破[6]。拓撲圖論、旋量理論、李群、李代數、四元數等各種數學工具不斷被研究人員引入機構學理論,使機構學理論有了大量的創新與發展[7]。
螺旋理論(也稱為旋量理論)的引入對機器人的構型及自由度類型的研究有著舉足輕重的作用[8]。螺旋理論在創立之初一直無人問津,直到20世紀中葉,Dimentberg應用螺旋理論對空間機構進行分析時才被研究人員所了解[9]。
目前,針對串聯、并聯以及混聯機器人的研究大多數對機器人的構型、自由度、運動學、動力學以及工作空間等進行分析,這些性能指標的好壞將直接影響機器人的工作精度、工作速度以及工作穩定性[10]。作為這些指標的基礎,機器人自由度的研究已經有了較為全面的發展,本研究采用旋量理論對一種4-URU并聯機構進行自由度分析,通過傳統的G-K自由度公式和旋量理論進行對比,得出旋量理論的應用對自由度的求解具有較好的直觀性,具有很大的科學研究價值。
1 自由度計算
4-URU空間并聯機構簡圖如圖1所示,該機構由四個相同的URU支鏈、動平臺n1以及靜平臺n2組成,和靜平臺n2連接的是虎克鉸(U副)。初始狀態下,其中的一個R副軸線垂直于靜平臺。和該運動副相連接的是連桿l1,連桿l1和l2通過R副相連接,R副軸線平行于靜平臺。連桿l2的另一端通過U副與動平臺相連接。
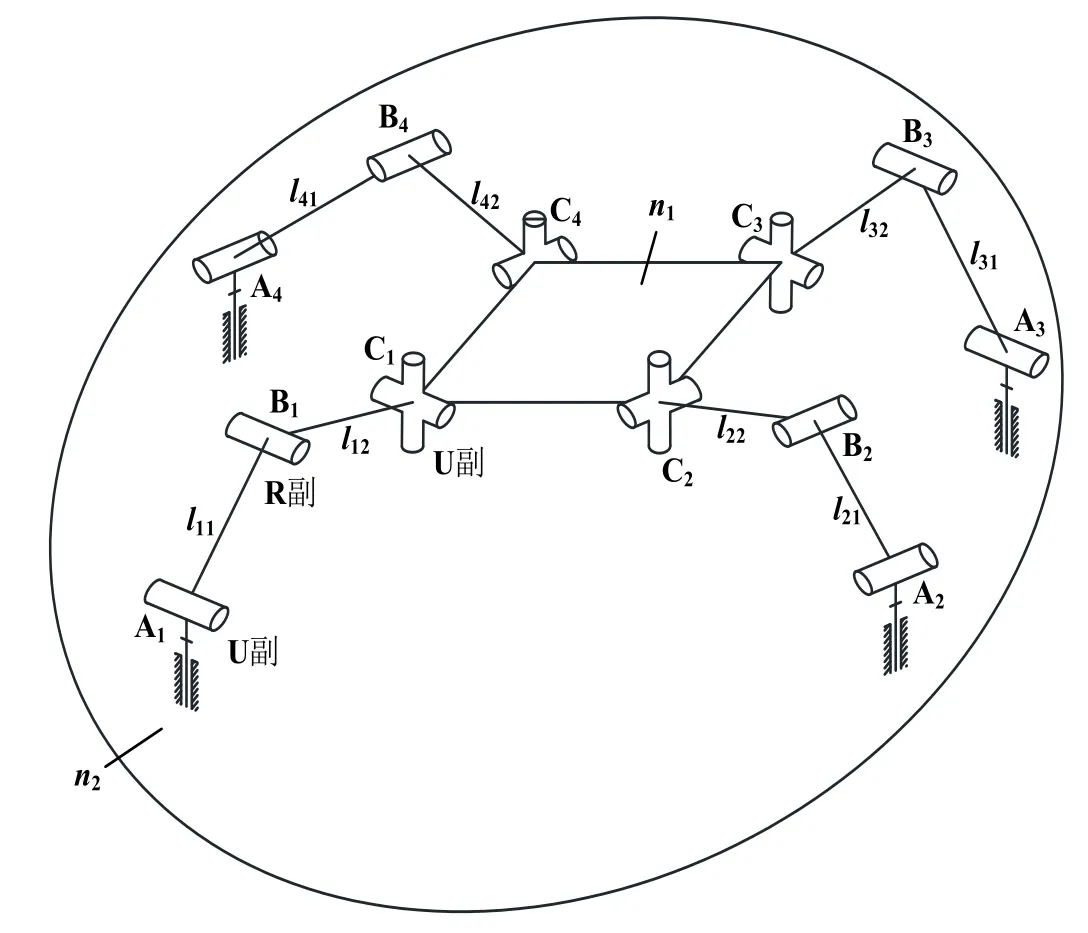
圖1 空間4-URU并聯機構簡圖
在該機構的四條支鏈中,支鏈A1B1C1和支鏈A3B3C3相對應的運動副的軸線平行,支鏈A2B2C2和支鏈A4B4C4相對應的運動副的軸線平行,支鏈A1B1C1和支鏈A2B2C2相對應的運動副的軸線相互垂直。從圖1中可以看出,這四條支鏈的自由度數都是相同的,因此只需要對其中的一條支鏈進行分析。現以支鏈A1B1C1作為研究對象開始分析。
支鏈A1B1C1的旋量分析示意圖如圖2所示。該支鏈由兩個U副和一個R副組成,U副可看作由兩個軸線相互垂直的R副組成。因此,該支鏈的運動副可認為由5個R副組成,其中有3個R副的軸向是相互平行的。最下面的R副軸向與靜平臺垂直。
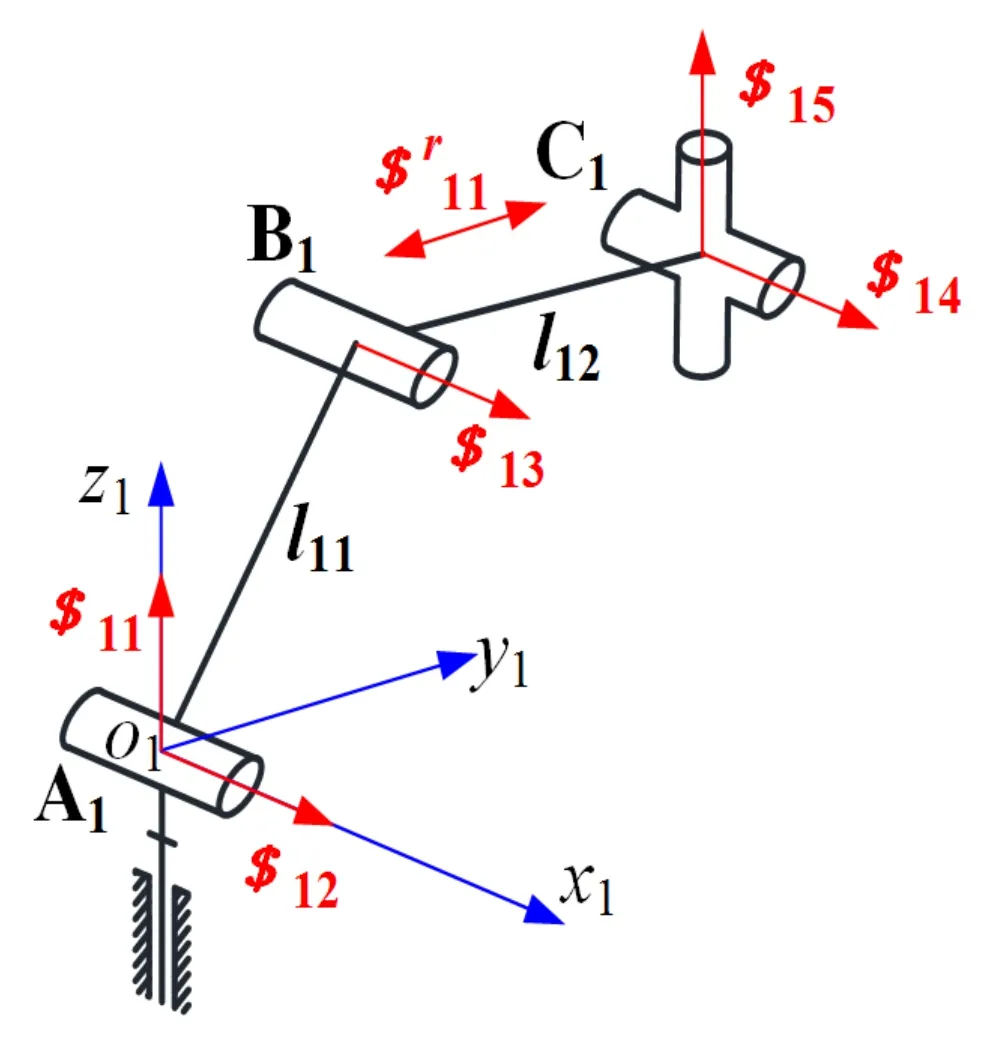
圖2 支鏈A1B1C1的旋量分析圖
在支鏈A1B1C1上建立坐標系o1-x1y1z1,根據旋量理論,一個螺旋如$=(S,S0),S表示的是轉動,S0表示移動,由于該支鏈只有轉動副,因此這5個R副可通過5個螺旋來表示。
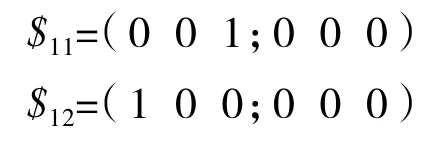

以上這5個螺旋組成支鏈A1B1C1的運動螺旋系。欲求出該支鏈的自由度,只需要求出該螺旋系的反螺旋即可。式(1)中e3、f3、e4、f4、d5均為標量,這些標量的取值不影響反螺旋的求解。由于該反螺旋與式(1)中任意一個螺旋的互易積都為零,因此可得到:

根據式(1)和式(2)可求出該反螺旋:

觀察該反螺旋可知,該螺旋是個約束力偶,如圖2中用雙箭頭所表示的力偶該力偶平行于y1軸,并且該力偶垂直于U副中兩個R副的軸線。因此可知,支鏈A1B1C1具有一個沿y1軸線方向的約束力偶,即限制了繞著y1軸線的轉動。由于該4-URU機構具有四個相同的支鏈,因此可以建立如下反螺旋系:
可以看出該反螺旋系線性相關,因此該反螺旋系中有兩個虛約束。若繼續對式(4)進行反螺旋求解,將會得到該機構需要的自由度,如式(5)所示:
從式(5)可以很明顯看出,該4-URU并聯機構具有4個自由度,分別是3個移動自由度以及1個繞著Z軸的轉動自由度[11]。
該自由度結果可通過修正的G-K公式進行驗證。式(6)中,d=6,n表示構建的總數,g表示運動副的數目,fi表示第i個運動副的自由度數。由于該機構具有兩個過約束,v=2,可得:
2 結論
盡管通過修正的G-K公式可解出并聯機構的自由度數目,卻無法求出每個自由度的類型,而通過旋量理論不僅可解出機構的自由度數目,還能判斷出每個自由度的類型。因此,利用旋量理論來求解機構的自由度具有非常大的優勢。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02