基于螢火蟲算法的預警機配置優化模型研究?
2022-02-18 09:02:56張佳琦
艦船電子工程 2022年11期
張佳琦 曹 毅
(國防大學聯合作戰學院 北京 100091)
1 引言
穿透性制空作戰(Penetrating Counter Air,PCA)是美軍針對反介入/區域拒止體系(A2/AD)而提出的作戰概念,首次出現在由美國2030年空中優勢事業能力合作小組出臺的《2030年空中優勢飛行規劃》文件[1],當前研究[2~3]對穿透性制空的主要觀點是通過發展以PCA戰機等高隱身性平臺為核心的空中力量系統簇遂行攻勢行動,對高威脅環境進行局部的持續穿透,重點打擊縱深高價值目標,消耗對手戰爭潛力從而削弱A2/AD能力保持自身空中優勢。在應對穿透性制空上,文獻[4~5]指出集中隱身資產是穿透性制空的主要特點,高隱身性降低了陸基平臺的打擊效率,必須依托航空兵的靈活機動和攻防兼備的特征,在遠離本土的空中作戰中以機動對機動,以進攻對進攻。
整體上看,應對穿透性制空作戰的本質是反隱身作戰,其首要任務是預警探測。以預警機為核心的空基預警探測力量是反隱身預警探測的延伸,在對PCA戰機等高隱身目標的發現識別上將發揮重大作用。預警機是空中力量的倍增器,具備機載雷達探測的空基優勢、中高空遠程巡航的機動優勢和生成空中體系作戰能力的集成優勢[6]。當前對于預警機空域配置問題的研究已有豐富的文獻資料,大量研究聚焦在不同巡邏航線下預警機探測區域的計算問題[7~10]和多預警機協同探測問題[11~13]上,基于特定作戰背景的研究較少。
本文立足于穿透性制空作戰背景,研究了應對穿透性制空作戰下預警機的運用方式,著重考慮探測加油機,從而提出了預警機探測陣位配置的優化模型。
2 應對穿透性制空作戰預警機的運用分析
2.1 加油機是實施穿透性制空作戰的關鍵要素
穿透性打擊編隊主要以PCA戰機、B-21轟炸機為代表的高端有人機平臺與大量功能不同的無人機或無人機集群構成,從機場起飛后,需借助若干次空中加油來保障遠距離奔襲和穿透行動。在美國智庫戰略預算與評估中心(CSBA)關于穿透性制空作戰的兵棋推演[14]中,推演小組將KC-46A、KC-135等有人加油機活動區域設置拒止區域以外,這些大型加油機在空軍基地和卸載空域之間來回穿梭,從空軍基地補充燃料并在卸載空域將燃料輸送給無人加油機。而無人加油機則進入拒止區域,在多個分散部署的空域為穿透性打擊編隊實施空中加油,以此提高加油機的生存性,并延長穿透性打擊編隊的航程和任務續航時間。圖1展示了穿透性制空下的空中加油行動。
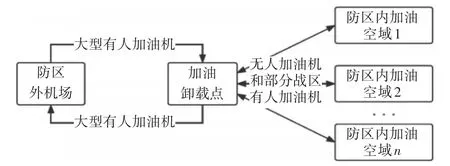
圖1 穿透性制空作戰中的加油行動
空中加油機保障其它航空兵作戰的方式主要有三種:伴隨式、會合式和空中等待式,作為高價值目標,加油機的活動空域通常需綜合計算后確定。在穿透性行動中,通常采用空中等待式,即預先規劃加油機等待空域,并采用分布式部署以提高生存能力和加油效率。因此加油機將在防區內外的空域中構設多個加油陣位。
2.2 預警機實施對加油機的防空警戒任務
作為空中力量體系的重要組成,預警機在應對穿透性制空作戰中主要有兩方面的作戰任務:1)配置在敵主要威脅方向的指定空域內,實施預警探測,重點探測隱身戰機,增加反隱身探測體系對高隱身目標的發現概率,也可重點監視保障飛機,特別是監視加油機等高價值目標的活動。2)指揮引導己方截擊航空兵對來襲目標實施攔截。
預警機在探測隱身戰機特別是高空突防的敵機時,優勢并不明顯,對加油機的監視反而能更好地掌握空情信息。依托無線電技術偵察情報的信息支援以及天波超視距雷達對隱身目標的概略探測,可以初步判定敵主要來襲方向和加油機活動空域。在保證自身安全的情況下,預警機巡邏空域應盡量靠前,可采用沿邊境線巡邏或設置巡邏空域的方式,巡邏航線的長邊應該與敵主要來襲方向垂直。作為空中高價值目標,預警機需部署在敵方打擊安全線之外,打擊安全線通常由敵防空武器范圍、敵機速度和其機載武器最大射程等綜合確定。多架預警機按一定的間隔進行線狀部署,可以構成有較大寬度和一定縱深的空基雷達網,從而形成能夠覆蓋多個點狀區域的預警帶,更好地完成警戒監視任務,如圖2所示。
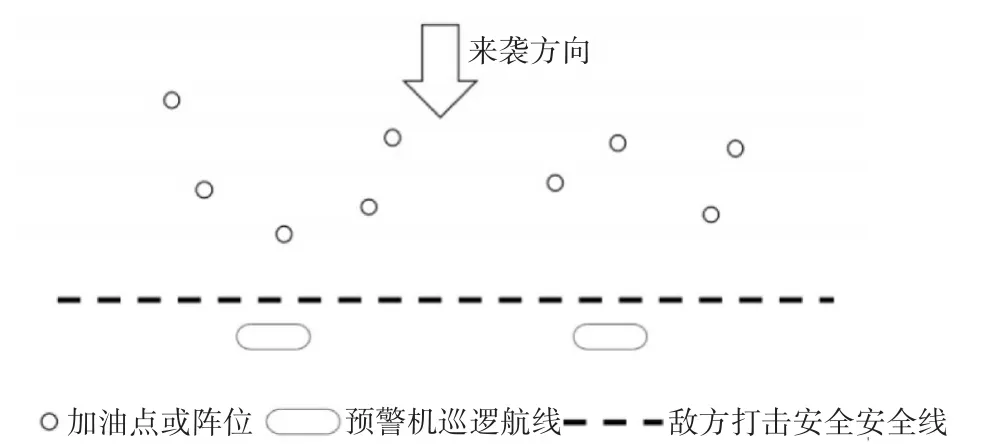
圖2 預警機對多個加油陣位的探測示意圖
在戰斗機護航下,預警機可適時前出實施大區域空中警戒巡邏,以增加預警時間,進一步完善反隱身探測體系。若發展并列裝無人預警機,則前出距離和前出時機的可選擇性將會更大。
3 基于螢火蟲算法的預警機配置優化模型
3.1 模型假設
本文重點考慮預警機對多個空中加油陣位的預警探測問題,給出如下基本假設:
1)預警機是全方位掃描型,采用跑道形巡邏航線且直飛航線垂直于敵來襲方向。
2)敵方有多個無人加油機空中加油陣位,通常加油高度層一定,假設其空中加油陣位都處在同一高度,并簡化為點狀目標。
3)假設敵方打擊安全線為直線,并假設已經計算確定了預警機巡邏航線中心位置處在垂直于敵來襲方向的某條直線CL上,CL線位于打擊安全線己方一側。
4)預警機的探測區域可分為總覆蓋區、強效區、弱效區和探測盲區,由于隱身飛機具備高機動性和較小的雷達反射截面積,因此僅關注強效區。
3.2 預警機配置優化模型
1)首先考慮單架預警機探測的配置問題。
設預警機在目標所在高度上的最大探測距離為R,航線長邊長度為L,轉彎半徑為r,單位均為千米。以CL線為x軸,任取其上一點為原點,來襲方向為 y軸建立坐標系,巡邏空域中心點位置Oc(xc,0),則航線左右轉彎圓心坐標分別為
在不引起歧義的情況下,不區分中心點、左右頂點的記號和它們的橫坐標,此時圖3中虛線為預警機強效區的邊界,強效區是預警機在巡邏航線上任意位置均可探測覆蓋的區域,是以巡邏航線上的各航跡點為中心、以載機雷達探測距離為半徑的所有曲線圍成圖形的交集,其包絡方程是以 p1和 p2為圓心,半徑均為R?r的兩個圓的交集,在該坐標系下為分段函數:
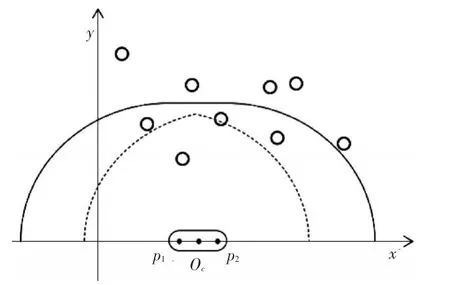
圖3 單預警機探測模型

假設已通過概略反隱探測到N個空中加油點位,其位置記為ti=(xi,yi),1≤x≤N,優化目標是確定Oc,使落入強效區的目標數量最多且點位盡可能遠。“盡可能遠”的是指點位盡可能靠近強效區的邊界,體現盡早發現的要求。該多目標優化問題可以如下表述:
2)多預警機探測的配置模型
對于多預警機探測,可以引入先驗條件簡化問題,即認為多架預警機應保持一定的重疊區,令其巡邏空域的中心點間距取為定值D,而后可轉化為單預警機的配置優化問題。
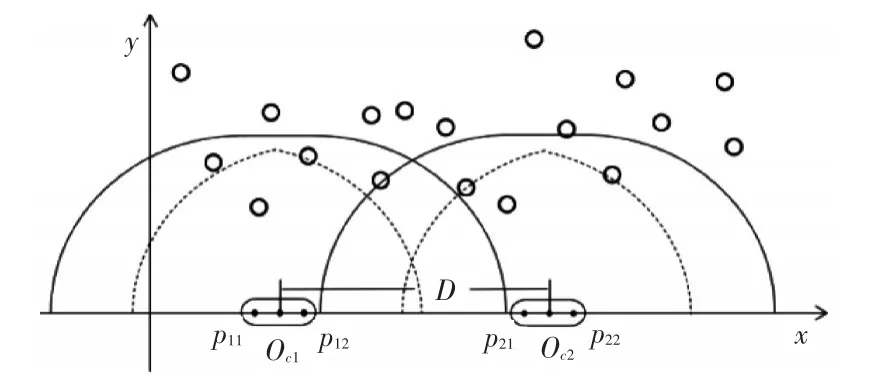
圖4 多預警機探測模型
該優化問題可表述為
其中∪Aj是多架預警機強效區的并集,是多架預警機強效區邊界的分段函數,與單預警機模型的區別在于強效區邊界函數的確定依賴于參數D。實際中通常采用不同型號的預警機以彌補不同體制雷達的探測盲區,此時需對雷達探測范圍等參數進行調整。
3.3 螢火蟲算法優化求解
對于上述問題的目標函數,其預警機巡邏航線中心位置xc作為自變量出現在求和范圍和分段函數自變量定義域區間之中,梯度下降等常規優化算法不適用,而較為適用以蟻群算法、粒子群算法為代表的群智能算法。本文選用群智能算法中的螢火蟲算法[15]來加以求解,該算法由 Yang[16]提出。其仿生原理是螢火蟲能夠通過下腹發光器的生化反應發光進行信息交流,其數學描述主要涉及發光強度和吸引度。發光強度描述螢火蟲所處位置的優劣并決定移動方向,吸引度決定移動距離。
螢火蟲的發光強度通常定義為
其中I0為自身亮度,與目標函數值有關,目標值越優,亮度越亮;γ為光強吸收系數,表示熒光會隨著距離的增加和傳播媒介的吸收逐漸減弱,可設置為常數;d為兩個螢火蟲之間的距離。在求解最大值的問題中,通常可以將發光強度取為目標函數值,即:
其中l是螢火蟲的空間位置。
螢火蟲的吸引度定義為
其中β0為最大吸引度,γ和d意義同上。
螢火蟲位置更新公式如下:

其中li和lj是螢火蟲i和j的空間位置,α是步長因子,ε為隨機擾動。
圖5給出了螢火蟲算法的基本流程。
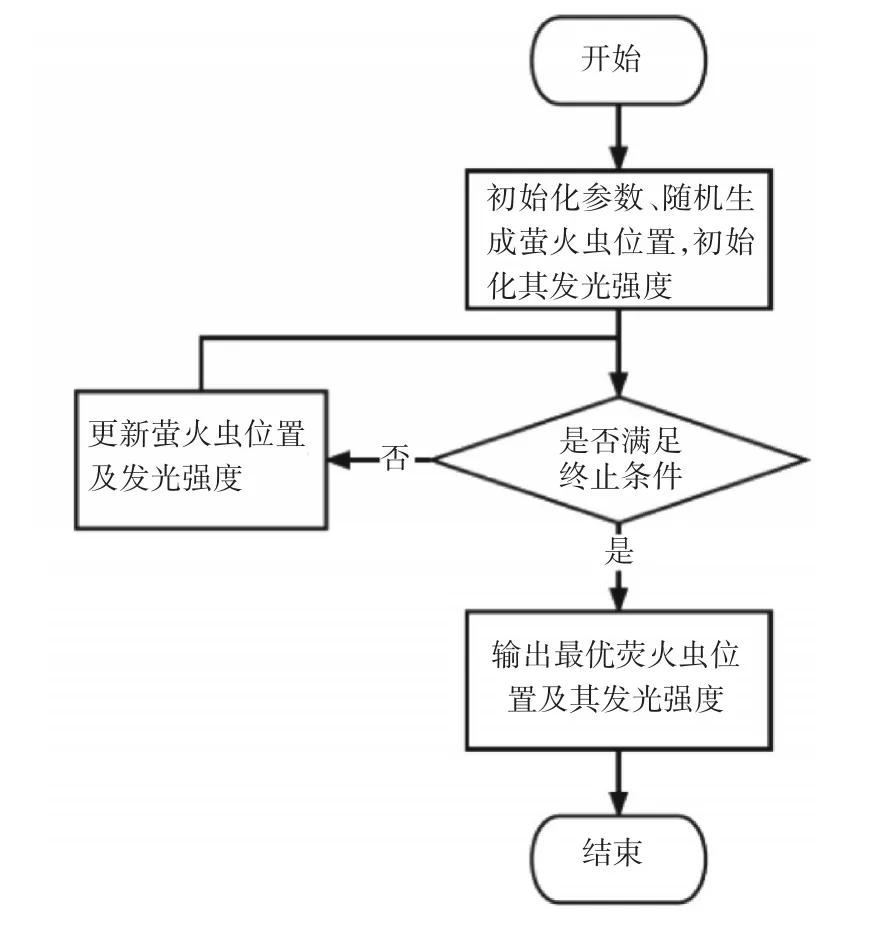
圖5 螢火蟲算法流程圖
4 仿真實驗分析
以單預警機探測模型為例,對于這種多目標優化問題,可轉為單目標問題進行求解。考慮到目標個數N無量綱,而目標與強效區邊界的距離的單位為km,因此可利用乘法來組合兩個目標函數,結果如下:

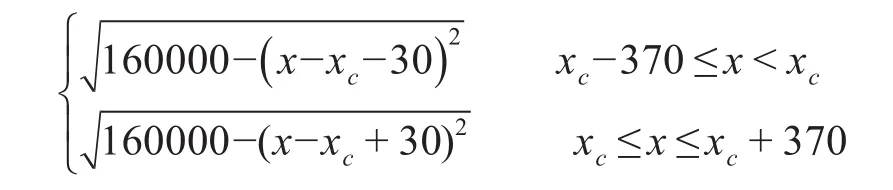
單預警機采用跑道形巡邏航線時,長度通常在60km~90km,兩線間隔20km~30km,取在目標所在高度的最大探測距離R為400km,航線長度L為60km,轉彎半徑r為15km,需要優化確定的是預警機巡邏航線中心位置xc,強效區的包絡方程S()x可以確定為
落入強效區的橫坐標范圍A為 xc?370≤xi≤xc+370。假設在該坐標系下,有N=5個空中加油點位,其坐標分別如表1。
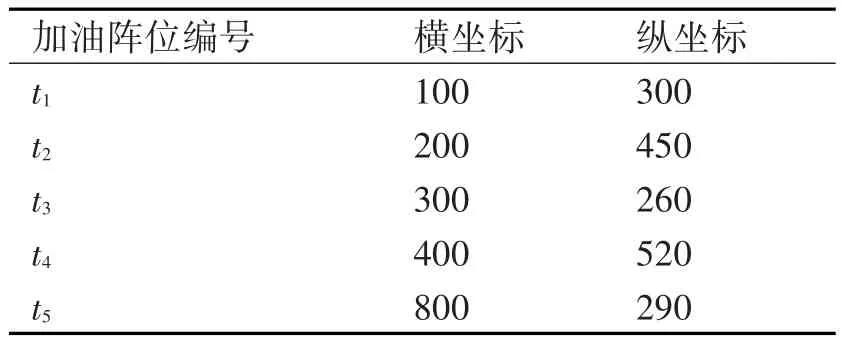
表1 空中加油點位坐標
利用Matlab對該目標函數離散化后繪制圖像如圖6。
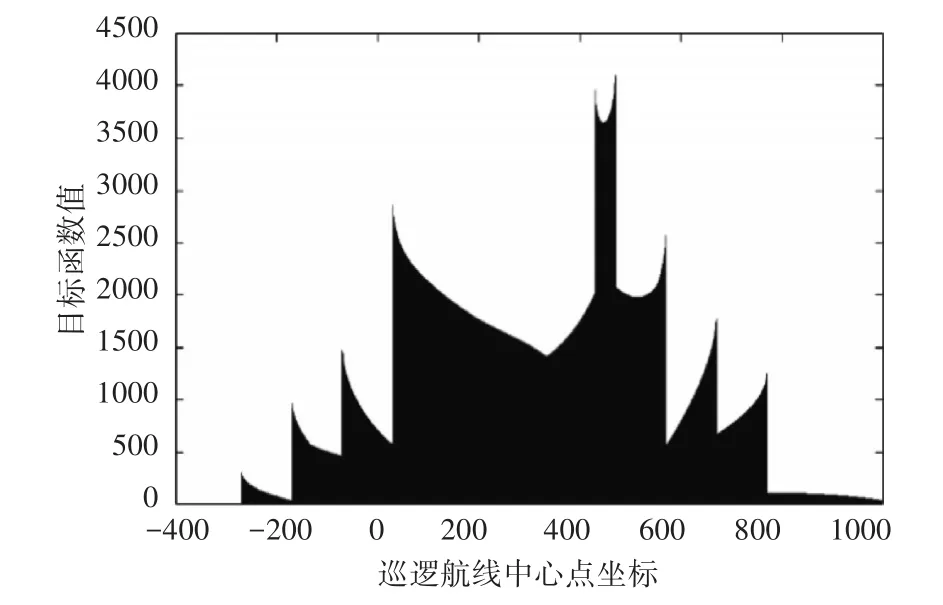
圖6 目標函數圖像
可以觀察到,該函數圖像不連續且有多個局部極值,優化算法容易陷入局部最優,但有全局的最大值。
通過Matlab編寫螢火蟲算法代碼求解,設置螢火蟲種群數量為20,光強吸收系數γ=0.01,步長因子α=0.1,終止條件通過設置最大迭代次數為5000來實現,得到的最優解xc=470,此時目標函數值達到最大4.1001×103。圖7顯示了螢火蟲算法求解該問題的收斂性能,盡管曾陷入局部最優,但整體上其收斂速度較快。
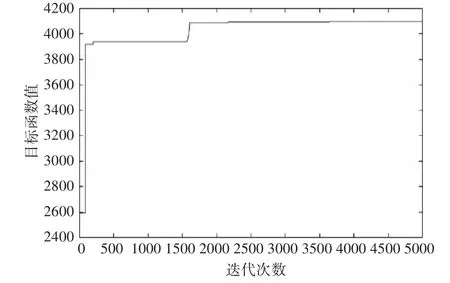
圖7 螢火蟲算法收斂曲線
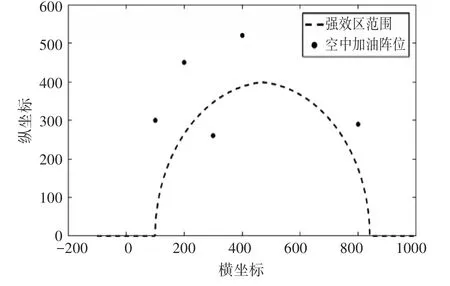
圖8 預警機最優配置方式
處于最優位置時,預警機強效區探測范圍與加油陣位的相對位置關系如圖8所示。從結果可以看出,加油陣位分布在強效區邊緣,且都落入強效區橫坐標范圍內:1)對于探測范圍之外的加油陣位,隱身飛機若按照既定航線將進入預警機強效區;2)對于探測范圍之內的加油陣位,可以完全監視加油機和隱身飛機。
5 結語
穿透性制空以隱身突防為主要樣式,難以發現和跟蹤,但其并不是全過程隱身的。在空中加油階段,可以前出預警機監視重點活動空域,極大地提高預警探測效能。進一步,若通過指揮控制引導我方隱身飛機前出攻擊加油機則會直接令穿透性制空行動失能失效。本文提出的預警機配置模型更多地考慮了對分布式部署加油機的探測問題,通過螢火蟲算法求解該優化問題較簡便,具備一定實用價值,可為應對穿透性制空作戰中預警機運用提供參考。