履帶式農機設計及其爬坡運動學仿真
2022-02-21 03:29:22青宗翼任振興
農機使用與維修 2022年2期
關鍵詞:模型
青宗翼,黃 龍,樊 越,任振興
(成都大學 機械工程學院,成都 610106)
0 引言
作為農業大國的中國存在多種地形的農業耕地環境,適合北方平原地區的農業機械難以適應多丘陵地形特點的四川地區。隨著農業設備機械化和自動化的飛速發展,履帶車輛在農業生產中應用越來越廣泛[1-2]。相比于輪式車輛,履帶車輛在農業生產工作以及道路行駛穩定性方面有著明顯優勢[2]。近年來,國內外學者對履帶車輛進行大量仿真分析及試驗研究[3-8]。履帶行走裝置作為農機的運行部分,也是整臺農機的支承基座,承受農機的自重及工作裝置工作時的阻力,關系到整機的工作性能。在履帶農機設計過程中,必須合理設計行走裝置。本文基于動力學軟件RecurDyn/Track(LM),構建履帶式農機履帶行走機構的三維模型,采用動力分析方法對履帶式農機的坡道行駛穩定性進行了仿真分析,以期為履帶農機行駛穩定性提供參考。
1 農機爬坡穩定性分析
爬坡穩定性是指農機爬坡過程中受到各種外部干擾而不改變前進方向,并維持穩定爬坡的能力。為了便于建模計算,本文主要針對農機在坡道狀態下的勻速行駛或制動時不產生傾翻或滑移展開分析。根據坡道行駛方向,可分為縱向穩定性和側向穩定性,本領域一般采用傾翻角和滑移角作為爬坡穩定性的評價標準。在分析過程中,做如下假設:坡道僅僅只有一個方向的傾斜角度,縱向坡道或橫向坡道,所謂的縱向坡道是指農機沿坡度方向行駛,橫向坡道是指農機在坡道的等高線上行駛;農機的履帶軌距相等,坡面無凹凸狀。農機在坡道上穩定行駛時所受的作用力主要包括農機自身重力、前進方向的空氣阻力、支撐地面的法向反力、行駛時的地面摩擦阻力以及農機自身的牽引力。
1.1 縱向行駛穩定性
縱向行駛穩定性是指農機沿坡道坡度方向行駛時農機整體以履帶前后支重輪為中心分別翻轉的可能性,在此,可以采用縱向極限翻傾角βlim和縱向滑移角βφ作為縱向行駛穩定性的評價指標。
1)勻速上坡行駛時,履帶式農機在縱向坡道上行駛時的受力分析如圖1所示,其中勻速上坡時縱向極限傾翻角為βlim和縱向滑移角為βφ,L為履帶接地長度,mm;c為農機質心與后輪間距,mm;a為農機質心與前輪間距,mm;h為農機質心與地面間距,mm;m為地面反力與后輪間距,mm;N1為地面對履帶的垂直支撐力,N;F1為履帶受到地面的阻力,N;G為農機自重,kg。
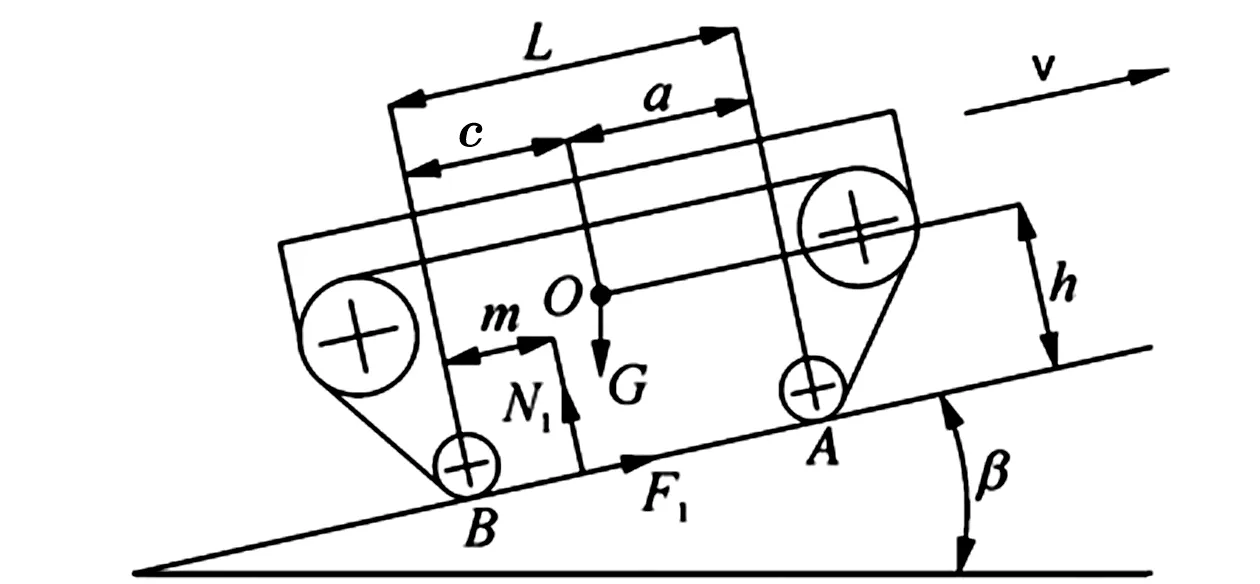
圖1 履帶式農機沿坡度方向爬坡勻速行駛
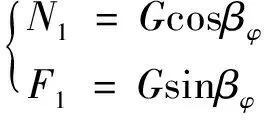
當履帶式農機勻速在坡道上爬坡時,其所受到的外部因素較小,可假設其在坡道上處于靜止狀態,農機受力平衡[9],可得平衡方程
(1)
對B點取力矩,可得力矩平衡方程bGcosβ-hGsinβ-N1m=0,對其化簡可得
(2)
而要使農機在爬坡過程中不發生傾斜,需滿足m≥0,即Gbcosβ-Ghsinβ≥0,求解此式,可得農機在坡道坡度方向爬坡時不發生傾翻的極限傾翻角為
(3)
坡道坡度方向爬坡的最大滑移角βφ由農機履帶與地面之間的附著條件決定,可設路面與履帶組件的附著系數為ξ,此時,農機在坡道上受力平衡,其平衡方程為
(4)
農機附著力為FΦ=ξN1=Gξcosβφ,其中FΦ為農機驅動機構產生得牽引力。

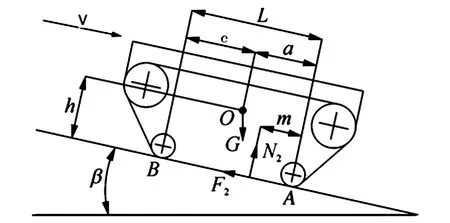
圖2 履帶式農機沿坡道坡度方向勻速下坡行駛
由農機平衡和力矩平衡對履帶農機進行力學分析,可得
(5)
要使農機不發生傾斜,則需滿足m≥0,即Gacosα-Ghsinα≥0。因此,可得到農機在坡道上行駛時不發生傾翻的極限傾翻角為
(6)

綜上所述,履帶式農機在坡道坡度方向勻速行駛時,其穩定行駛性能是由農機自身的結構參數和履帶與土壤間的附著系數共同決定。
1.2 側向行駛穩定性
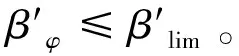
側向行駛穩定性是指農機沿坡道的等高線上勻速行駛時,農機整體以左右履帶為支撐分別翻轉或滑移的可能性,在此,可以采用側向極限翻傾角、側向滑移角作為側向行駛穩定性的評價指標。農機在坡道上沿坡道等高線行駛如圖3所示,其中側向極限傾翻角為βlim和側向滑移角為βφ。
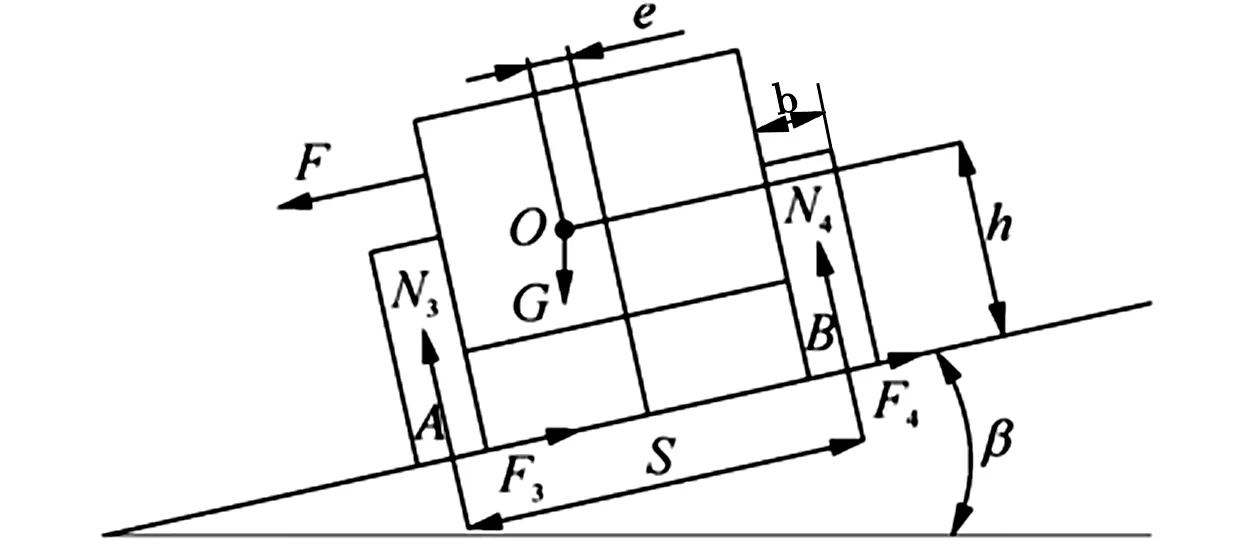
圖3 履帶式農機沿坡道等高線勻速行駛
圖3中,S為履帶軌距,mm;b為履帶寬度,mm;e為農機質心與縱向對稱平面之間的距離,mm;N3和N4為地面對履帶的垂直支撐力,N;F3和F4為兩側履帶分別受到地面的阻力,N。
根據農機在坡道等高線上的受力平衡方程可得
(7)
對A點取力矩
N4S-Gcosβ(0.5S-e)+Ghsinβ=0
(8)
整理得
(9)
要使農機不發生側向側翻,需滿足N4≥0,即G(0.5S-e)cosβ-Ghsinβ≥0。整理可得,農機不發生側翻的最大側向傾翻角為
(10)
由式(10)可知,農機側向行駛穩定性主要與履帶底盤軌距、履帶寬度和農機整體質心位置有關,即履帶式農機的側向行駛穩定性與其自身結構參數有關。當履帶底盤軌距一定時,最大側向傾翻角與質心高度成反比,當質心高度一定時,最大側向傾翻角與軌距成正比關系。
農機在坡道等高線上行駛時的最大滑移角βφ由履帶與地面之間的附著條件決定。基于農機在坡道上的受力平衡,不發生側向滑移時,應滿足
F3+F4≥Gsinβ
(11)
而(F3+F4)max=γGcosβ≥Gsinβ,即農機在坡道等高線上行駛時不產生側向滑移的最大坡道角為
βφ=arctanγ
(12)
履帶式機械在實際行駛過程中,均會存在切線驅動力FK。考慮到農機在坡道等高線行駛受到切線驅動力的作用,農機所受到的側向附著力會減小,如將履帶式農機看成一整體,在切線驅動力的作用下其受力平衡模型如圖4所示。
圖4 切線驅動力對附著力的影響
根據圖4農機滑移平衡模型,要使農機不發生側向滑移需滿足
(13)
由式(12)(13)可得,考慮切線驅動力的時候,最大側向滑移角βφ1為
(14)
由此可知,最大側向滑移角βφ1小于βφ,且FK越大,βφ1越小。
2 爬坡能力
履帶式機械的重要優勢就是爬坡能力強,可以應對各種復雜的路面狀況。履帶式農機為了適應丘陵山地等復雜地形,其爬坡能力尤其重要。農機在實際工況中需克服各種阻力,以便正常運行。而對于履帶式農機在爬坡時所需的驅動力FK需要從兩個方面考慮,一是受動力源驅動力限制,二是受履帶與路面之間的附著力限制兩種情況。
2.1 動力源驅動力限制的爬坡能力分析
動力源的最大驅動力為
(15)
式中p—動力源最大扭矩時的功率,kW;
η—機械傳動效率,0.94~0.98,取0.96;
v—動力源最大扭矩時速度,km·h-1。
簡化得到
(16)
設β=arctanf,則
(17)
2.2 履帶與路面之間的附著力限制的爬坡能力分析
履帶式農機在斜坡坡度方向上勻速行駛時,由受力平衡可知,其驅動力應滿足為F=Gsinα,農機在坡道上最大靜摩擦力系數為μ,最大靜摩擦力為
FK=μmgcosα
(18)
當F
αmax=arctanμ
(19)
履帶式農機在爬坡時克服靜摩擦力所需的最大加速度為
a=(μcosα-sinα)g
(20)
即,可根據履帶式農機與地面的摩擦系數來確定履帶拖拉機的最大爬坡能力。
3 農機基本參數
對農機的履帶行走裝置而言,其主要性能參數包括行駛速度、最大爬坡角度、接地比壓、最大牽引力等。本項目所設計的履帶式農機行走機構的基本參數如表1所示。
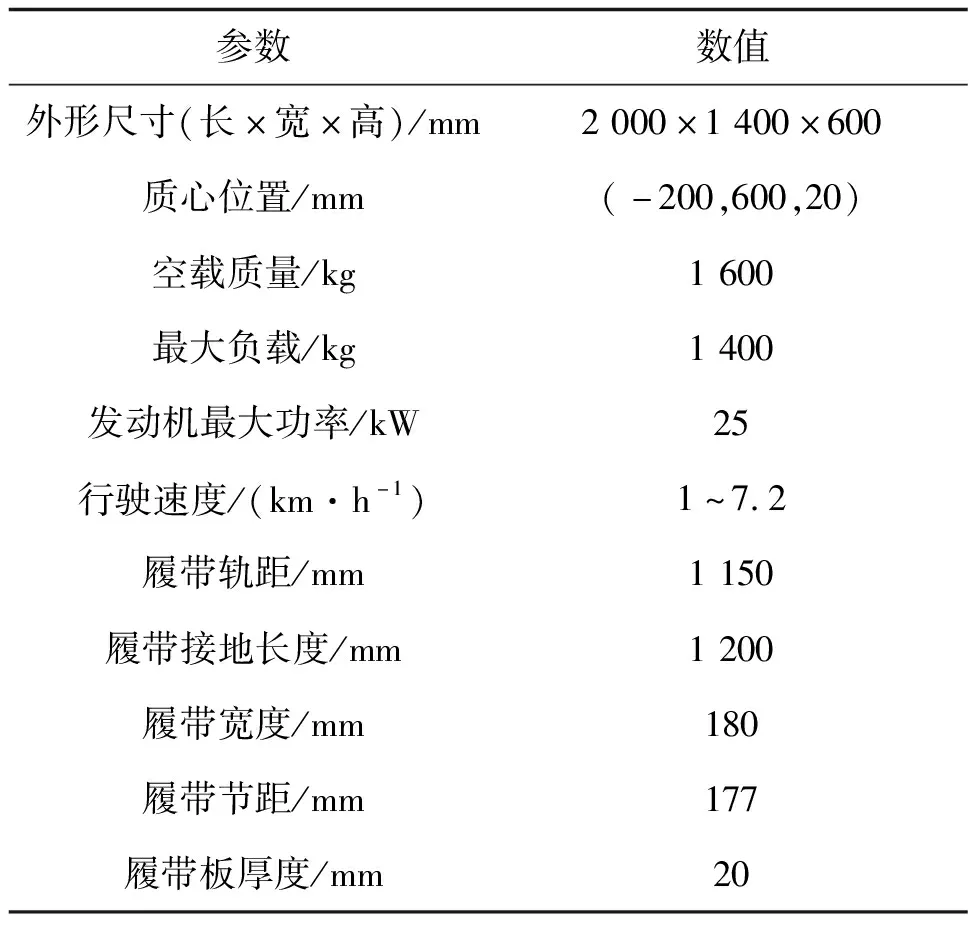
表1 農機基本參數
對于履帶式農機的行走系統而言,首先需核算履帶的平均接地比壓,即履帶對行駛地面的平均壓強,該指標決定了履帶底盤的通過性,由農機自重、履帶條數、履帶接地長度決定
(21)
式中p—平均接地比壓,MPa;
G—農機自重與負載,kg;
n—履帶條數,取n=2;
b—履帶寬度,mm;
L—履帶接地長度,mm。
設計履帶行走系統時,在結構允許的范圍內應使平均接地比壓盡可能小,一般推薦平均接地比壓p≤0.26MPa[10],取p=0.068 MPa,滿足要求。
4 坡地行駛仿真
4.1 幾何模型的建立
在建立履帶式農機的幾何模型時,一般對履帶行走機構做簡化處理,將相應的動力源、減速器、車架、車體附加設備等簡化為一剛體,此時履帶式農機簡化為主體和履帶行走機構,采用Solidworks對主體進行建模,導入RecurDyn軟件中,利用Track-LM模塊建立履帶行走機構[11-14],每側的履帶行走機構均包括驅動輪、支重輪、拖鏈輪、張緊輪、履帶和履帶架。圖5為履帶行走機構總體模型圖,在RecurDyn設置農機整機質量以及材料屬性,設置履帶式農機質心坐標為(-200,600,20)。
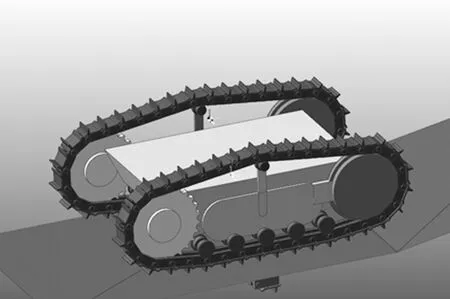
圖5 履帶行走機構總體模型圖
4.2 添加約束
本項目所述的農機履帶行走機構各零部件之間的連接關系如表2所示。分別對左右兩側履帶的驅動輪添加速度驅動函數,分別為低速擋STEP(TIME,0,0,0.1,-4.78)、高速擋STEP(TIME,0,0,0.1,-34.41)。
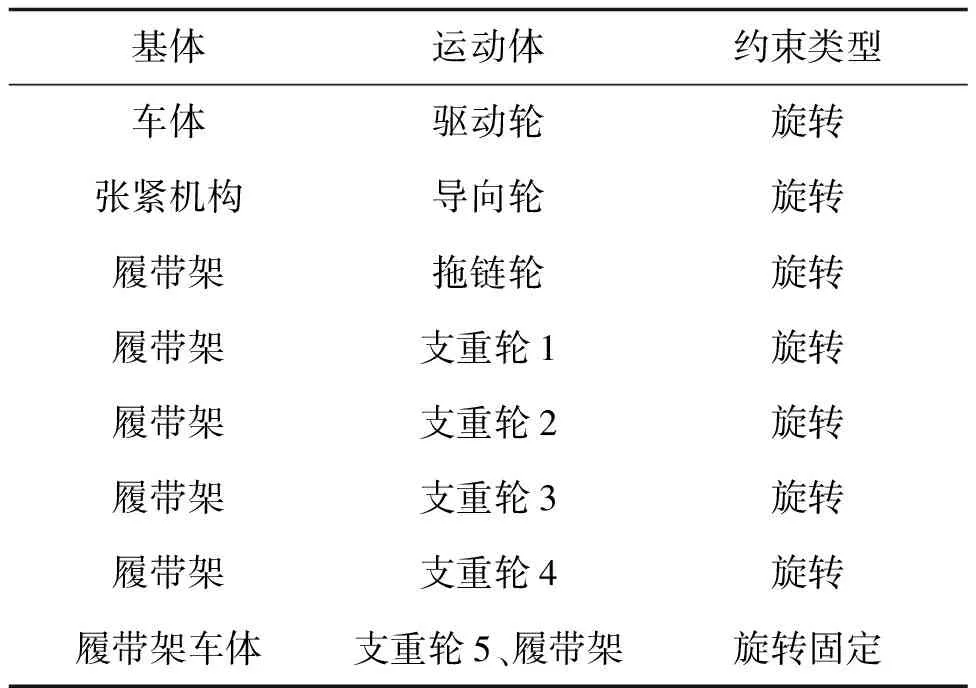
表2 履帶各零部件之間的約束關系
4.3 地面模型建立
RecurDyn/Ground模塊提供了相應的仿真路面模型,根據農機爬坡仿真需求添加相應路面斜坡輪廓曲面,再設置相應的路面參數。本論文中采用黏土(Clayey Soil)地面模型,其路面參數如表3所示。
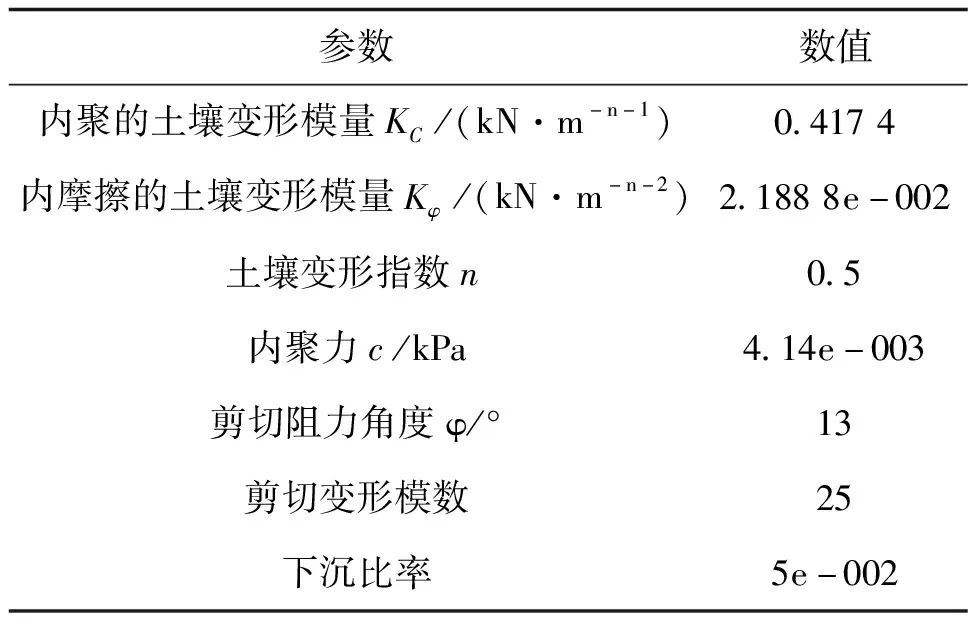
表3 黏土地面模型的參數
4.4 爬坡穩定性仿真
對上述黏土土壤的不同坡度斜坡進行仿真,探討履帶式農機的最大爬坡角度。當履帶式農機爬坡過程中達到最大俯仰角時,農機會發生傾翻,此時的最大坡度角即為縱向極限傾翻角。采用低速擋(1 km·h-1)進行仿真,經多次仿真得出,履帶式農機在黏土路面的最大爬坡角度為25°。在黏土路面分別建立10°、15°、20°的斜坡,模型如圖6所示,采用低速擋進行仿真,分別對X、Y方向的速度以及俯仰角進行分析,結果如圖7所示。
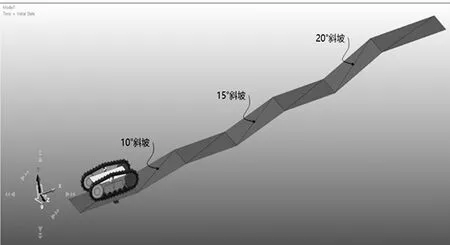
圖6 黏土路面爬坡模型
履帶式農機在爬坡時,俯仰角是農機能否爬坡的關鍵指標之一。由圖7可知,仿真開始時,農機在平地加速行駛,農機俯仰角受農機啟動加速度影響,在一定范圍內波動;農機爬坡時,俯仰角受坡度角影響,爬坡完成后,俯仰角恢復正常,農機保持平穩行駛。同時,由圖7可知,當履帶式農機所爬坡的坡度越大時,農機的爬坡速度隨之下降,此時,相同時間內農機的爬坡行駛距離變短,且在爬坡結束后速度變化越大,造成農機出現不穩定狀態。
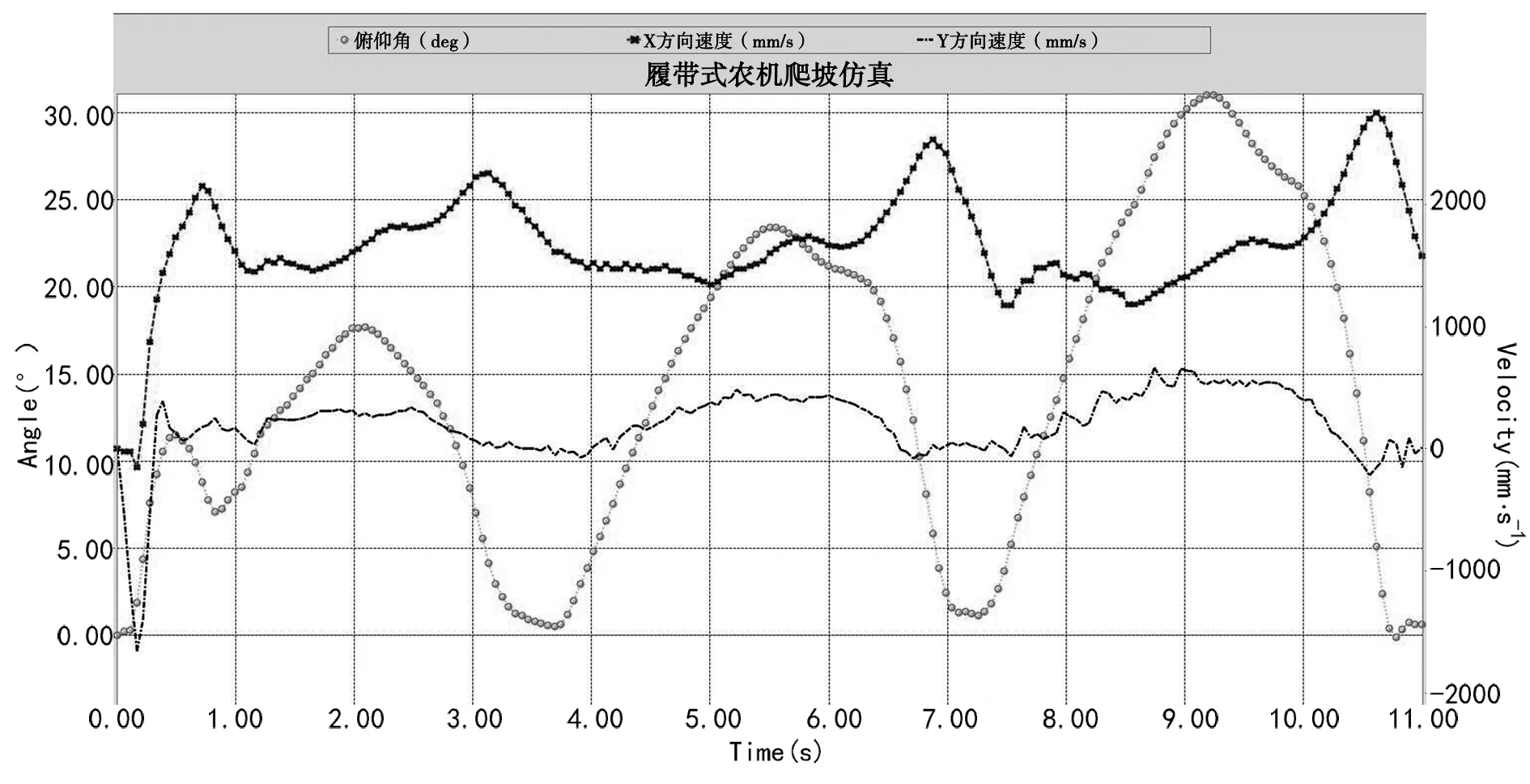
圖7 履帶式農機縱向爬坡行駛仿真結果曲線
5 結論
對履帶式農機行駛穩定性進行了靜態分析,建立了履帶式農機的縱向穩定性模型和側向穩定性模型,求得各工況下履帶式農機的靜態穩定條件,通過分析計算得出,行駛坡度、農機的整機參數、履帶與地面的附著系數對農機的穩定性起決定性作用。采用多體動力學軟件RecurDyn對履帶式農機建立仿真模型,對其爬坡性能進行動力學仿真,得出該履帶式農機在黏土地的縱向最大爬坡角度為25°,滿足四川丘陵地區的廣泛使用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19