谷物聯(lián)合收獲機(jī)清選機(jī)構(gòu)原理與清選質(zhì)量提升思路
2022-02-21 03:29:24劉海龍
農(nóng)機(jī)使用與維修 2022年2期
劉海龍
(密山市八五五農(nóng)場第四管理區(qū)26作業(yè)站,黑龍江 密山 158327)
0 引言
谷物聯(lián)合收獲機(jī)能夠適應(yīng)多種農(nóng)作物的收獲作業(yè),利用現(xiàn)代化的機(jī)械設(shè)計能夠?qū)崿F(xiàn)一次性作業(yè)完成秸稈切割、谷物喂入、谷物脫粒、分離、清選、集中存放或輸出等眾多功能。清選裝置作為糧食收獲品質(zhì)的重要保障,能夠在收獲作業(yè)的同時將糧食中混雜的穎殼、斷穗、短莖稈等雜余清除,隨著谷物聯(lián)合收獲機(jī)逐漸向大型化發(fā)展,糧食的收獲效率得到了顯著提升,與此同時對谷物清選結(jié)構(gòu)的性能要求也更高。不斷增大的谷物喂入量是制約清選效率的主要因素,因此,從大型機(jī)械化生產(chǎn)的角度出發(fā),分析提升清選質(zhì)量的合理方式,是提升谷物聯(lián)合收獲機(jī)作業(yè)性能的有力保障,更有利于我國糧食的優(yōu)質(zhì)產(chǎn)出。
1 谷物聯(lián)合收獲機(jī)主體結(jié)構(gòu)
谷物聯(lián)合收獲機(jī)是水稻、小麥等農(nóng)作物收獲的主力機(jī)型,具有很好的實(shí)用性特征,其在我國的大面積推廣應(yīng)用起始于20世紀(jì)70年代。經(jīng)過多年的發(fā)展,現(xiàn)階段我國使用的谷物聯(lián)合收獲機(jī)種類和機(jī)型較多,根據(jù)機(jī)械結(jié)構(gòu)的差異,可將谷物聯(lián)合收獲機(jī)大體分為牽引式聯(lián)合收獲機(jī)、懸掛式聯(lián)合收獲機(jī)、自走式聯(lián)合收獲機(jī)三種機(jī)型[1]。牽引式谷物聯(lián)合收獲機(jī)在我國的應(yīng)用時間較早,這一時期的很多農(nóng)業(yè)機(jī)械與拖拉機(jī)配套均采用牽引式結(jié)構(gòu),但其工作不夠靈活,機(jī)組過長且技術(shù)落后,逐漸被生產(chǎn)所淘汰。而現(xiàn)階段我國農(nóng)業(yè)生產(chǎn)中使用較多的為懸掛式和自走式兩類谷物聯(lián)合收獲機(jī),懸掛式機(jī)型與拖拉機(jī)的后懸掛連接后進(jìn)行生產(chǎn)作業(yè),結(jié)構(gòu)相對簡單,機(jī)型體積較小;自走式機(jī)型為獨(dú)立的收獲機(jī)產(chǎn)品,具有專用的動力、底盤、控制、行駛系統(tǒng),多為中大型機(jī)型。這兩類機(jī)械都能夠滿足農(nóng)作物的收獲需求,但是從自動化程度來看,自走式機(jī)型的功能配備更為完善,如圖1所示,為自走式谷物聯(lián)合收獲機(jī)主體結(jié)構(gòu),與懸掛式機(jī)型相對比,自走式谷物聯(lián)合收獲機(jī)除能完成多種谷物的收割、收集功能外,還能在作業(yè)過程中一次性完成脫粒、分離及清選工作,能夠顯著降低收獲作業(yè)后的工作量,并提高谷物收獲質(zhì)量[2]。

圖1 谷物聯(lián)合收獲機(jī)主體結(jié)構(gòu)
2 清選機(jī)構(gòu)的研究現(xiàn)狀
隨著農(nóng)業(yè)機(jī)械化生產(chǎn)的快速發(fā)展,我國農(nóng)業(yè)機(jī)械的研發(fā)能力得到了快速提升,谷物聯(lián)合收獲機(jī)在向大型化發(fā)展的同時,也更加重視性能的提升,對于清選裝置而言,如何在保證高效率和高除雜率的情況下盡可能降低清選過程的糧食損失,是現(xiàn)階段清選機(jī)構(gòu)研究的重點(diǎn)內(nèi)容。崔俊偉等[3]為有效解決軸流式谷物聯(lián)合收割機(jī)清選效率不足的問題,設(shè)計了雙離心風(fēng)機(jī)振動篩式清選裝置,有效提升了清選質(zhì)量;王立軍等[4]以貝殼篩清選機(jī)構(gòu)作為主要研究對象,利用CFD-DME耦合法建立了貝殼篩結(jié)構(gòu)與清選質(zhì)量之間的關(guān)系模型,證實(shí)了篩孔高度是影響清選效果的重要因素,并得到了貝殼篩結(jié)構(gòu)參數(shù)最佳分布關(guān)系;李耀明等[5]設(shè)計了新型振動篩結(jié)構(gòu),利用三塊不同角度且鍍有含氟丙烯酸樹脂的波紋板組合成的抖動板,有效解決了物料粘連問題,且提高了谷物進(jìn)入清選篩的分布均勻程度,改善了清選質(zhì)量;程亞民等[6]針對清選裝置的連桿機(jī)構(gòu)進(jìn)行三維建模,并將模型導(dǎo)入到ADMAS中進(jìn)行數(shù)據(jù)仿真分析,生成了不同零件質(zhì)心在各個時間段的加速度和速度變化曲線,為清選裝置連桿機(jī)構(gòu)結(jié)構(gòu)優(yōu)化提供了數(shù)據(jù)支持。
3 清選機(jī)構(gòu)的原理
清選裝置作為制約谷物聯(lián)合收獲機(jī)技術(shù)發(fā)展的重要因素,清選裝置的結(jié)構(gòu)和功能近年來得到了快速優(yōu)化,清選機(jī)構(gòu)的結(jié)構(gòu)設(shè)計成為了含雜率和損失率的主要影響因素。
3.1 清選裝置的分類
清選裝置根據(jù)機(jī)械結(jié)構(gòu)和功能原理的不同大體可以分為氣流式和風(fēng)篩式兩大類。氣流式清選裝置主要利用風(fēng)機(jī)提供的氣流將谷物中混雜的穎殼、斷穗等雜物分離排出,氣流式清選裝置的結(jié)構(gòu)簡單、體積小、制造成本低,工作相對可靠,清選效率較高但清選質(zhì)量相對較低。風(fēng)篩式清選裝置是將風(fēng)機(jī)提供的清選風(fēng)力與清選篩的往復(fù)篩選運(yùn)動相配合,從而實(shí)現(xiàn)高效率的谷物篩選工作,風(fēng)篩式清選裝置相對于氣流式清選裝置結(jié)構(gòu)更為復(fù)雜。如圖2所示,為約翰迪爾R40聯(lián)合收割機(jī)的風(fēng)篩式清選裝置,包括了多葉片卷翼式可調(diào)速清選風(fēng)扇、雙層振動篩、抖動板、機(jī)架、傳動系統(tǒng)等組成。相對而言,風(fēng)篩式清選裝置節(jié)能性和分離性能更好,且目前的大中型谷物聯(lián)合收獲機(jī)中風(fēng)篩式清選裝置的使用比例達(dá)到93%以上,其適應(yīng)性強(qiáng)、清選效率高、清選后的籽粒含雜率低等優(yōu)點(diǎn)受到了生產(chǎn)廠家和農(nóng)民的認(rèn)可。
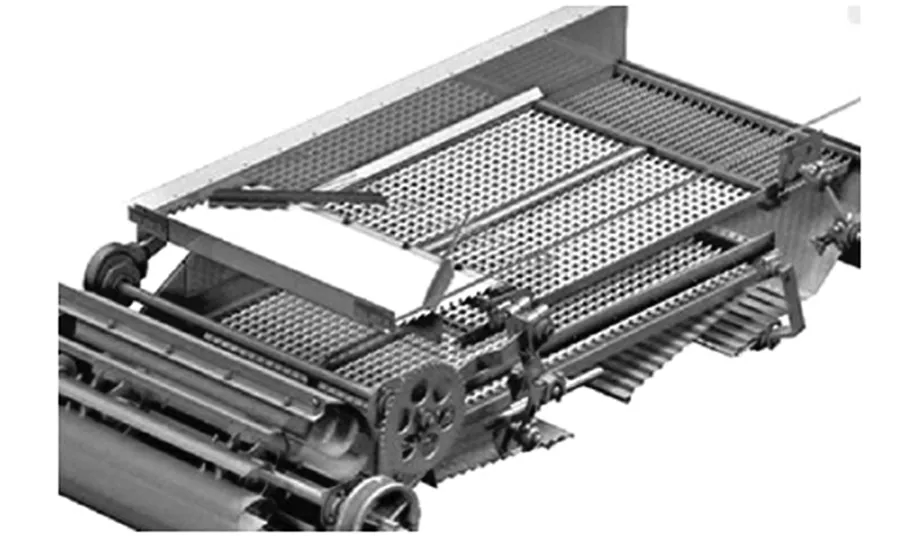
圖2 約翰迪爾R40聯(lián)合收割機(jī)風(fēng)篩式清選裝置
3.2 風(fēng)篩式清選裝置的結(jié)構(gòu)功能
3.2.1 清選篩的形式
清選篩篩網(wǎng)的不同對清選質(zhì)量的影響較大,根據(jù)篩網(wǎng)的不同,常用的清選篩包括魚鱗篩、沖孔篩、編織篩、貝殼篩、圓筒篩等多種類型[7]。不同清選篩的清選能力具有較大差異,例如魚鱗篩的單層清選能力較弱,多用作復(fù)合式多層篩網(wǎng)的上層使用;沖孔篩篩分物料精準(zhǔn),單獨(dú)使用時有效篩選面積小,通常用作多層篩網(wǎng)的下層使用;貝殼篩是單向篩選的篩網(wǎng),能夠有效后推送輕雜物,但由于效率較低,不適合應(yīng)用于大負(fù)荷工作場合。
根據(jù)清選篩運(yùn)動形式的不同,可將清選篩分為往復(fù)式振動篩和多維振動篩兩大類。往復(fù)式振動篩多通過曲柄連桿機(jī)構(gòu)或回轉(zhuǎn)機(jī)構(gòu)作為振動源,往復(fù)式振動篩只能在空間范圍的固定線路上做往返運(yùn)動,利用往返運(yùn)動產(chǎn)生的振動配合風(fēng)機(jī)的氣流吹力將雜余去除,同時糧食由篩孔落入收集裝置,現(xiàn)階段的往復(fù)式振動篩多選用多層篩網(wǎng)組合的形式,能夠顯著降低清選損失率,并提升作業(yè)效率。多維振動篩可實(shí)現(xiàn)三平移兩轉(zhuǎn)動的多種運(yùn)動方式,相對于往復(fù)式振動篩,多維振動篩能進(jìn)一步提高谷物分布的均勻性,有效利用篩網(wǎng)工作面積,從而提高清選質(zhì)量和效率。據(jù)統(tǒng)計,設(shè)計合理的多維振動篩比普通往復(fù)式振動篩篩分效率提高59.3%,含雜率降低49.7%。
3.2.2 風(fēng)機(jī)裝置
風(fēng)機(jī)是清選裝置氣流產(chǎn)生的動力源,風(fēng)機(jī)裝置通常包括風(fēng)扇、風(fēng)道、風(fēng)門等零部件組成,風(fēng)機(jī)的性能直接影響到風(fēng)選分離與籽粒清潔的實(shí)際效果。如圖3所示,在谷物清選的過程中,通過風(fēng)機(jī)風(fēng)扇的高速轉(zhuǎn)動,風(fēng)機(jī)中心處因為離心力作用形成真空度,風(fēng)機(jī)外部的空氣在負(fù)壓力作用下被吸入風(fēng)機(jī)內(nèi)部,并形成高速運(yùn)動的氣流,氣流隨著扇葉的離心運(yùn)動軌跡進(jìn)入風(fēng)道并最終進(jìn)入清選篩,形成清選的氣流作用力,在風(fēng)機(jī)的持續(xù)運(yùn)轉(zhuǎn)作用下,將谷物中混雜的雜質(zhì)帶離,與清選篩配合完成清選任務(wù)[8]。

圖3 清選裝置軸流式風(fēng)機(jī)示意
4 清選質(zhì)量的提升思路
4.1 進(jìn)一步提高清選效率
隨著農(nóng)村地區(qū)土地合作經(jīng)營模式的增多,糧食逐漸呈現(xiàn)大面積連片種植趨勢,為適應(yīng)高效率、大面積連續(xù)作業(yè)的需求,清選裝置的工作效率必須要實(shí)現(xiàn)進(jìn)一步提升。一方面利用現(xiàn)代化的仿真軟件模擬谷物清選的工作環(huán)境,優(yōu)化風(fēng)機(jī)風(fēng)量、送風(fēng)位置與清選篩的振幅之間的參數(shù)關(guān)系,確保各個機(jī)械部件之間形成科學(xué)的匹配關(guān)系,使清選機(jī)構(gòu)進(jìn)一步向精確化農(nóng)機(jī)要求轉(zhuǎn)變,使現(xiàn)有技術(shù)應(yīng)用更為合理;另一方面優(yōu)化篩網(wǎng)的布局形式,應(yīng)用多級篩網(wǎng)結(jié)構(gòu)和不同密度篩網(wǎng)通過合理布局實(shí)現(xiàn)多級篩分下的質(zhì)量提升,通過組合設(shè)計有效提升谷物通過率和清選速率。
4.2 進(jìn)一步提高清選質(zhì)量
在提高清選效率的同時,還必須重視清選質(zhì)量的提升,通過提高清選篩的振動性能保證糧食和雜余的快速分離,利用計算機(jī)軟件對篩選過程進(jìn)行模擬,選擇合適的風(fēng)量與振動頻率,改善傳統(tǒng)機(jī)型清選過程含雜率高、糧食損失大問題,確保風(fēng)機(jī)風(fēng)量大小不會帶走過多的糧食,同時保證收獲的谷物具有合格的含雜率。重點(diǎn)考慮從多風(fēng)道離心風(fēng)機(jī)應(yīng)用、改良篩片開度、增加篩分面積等方面進(jìn)行優(yōu)化。
4.3 提高清選裝置的智能化程度
由于谷物聯(lián)合收獲機(jī)所需要收獲的糧食種類多種多樣,不同的糧食對于清選裝置的參數(shù)調(diào)整各不相同,為提高清選裝置的使用便捷性,利用現(xiàn)代化的電控技術(shù),在重要的工作位置增設(shè)傳感器、視頻監(jiān)測設(shè)備,與液壓、電動、氣動技術(shù)有機(jī)結(jié)合,力爭實(shí)現(xiàn)針對特定作物自動調(diào)整清選篩振動頻率、風(fēng)機(jī)轉(zhuǎn)速、魚鱗篩開度、風(fēng)門開關(guān)板、分風(fēng)板角度等參數(shù),既減輕駕駛?cè)藛T的工作量,同時提高清選裝置工作的合理性,確保清選質(zhì)量和效率。
4.4 加強(qiáng)先進(jìn)清選技術(shù)的成果轉(zhuǎn)化
現(xiàn)階段,我國很多針對清選技術(shù)的研究還處于試驗階段,很多科技成果轉(zhuǎn)化為生產(chǎn)力的速度不足,導(dǎo)致技術(shù)提升緩慢,因此,相關(guān)科研機(jī)構(gòu)和農(nóng)機(jī)廠商應(yīng)積極提高先進(jìn)技術(shù)的轉(zhuǎn)化速度,采取科研院所與企業(yè)相互合作的方式實(shí)現(xiàn)先進(jìn)技術(shù)的應(yīng)用與普及,并同時加強(qiáng)先進(jìn)機(jī)型的農(nóng)機(jī)推廣和政策支持,提供相應(yīng)的購機(jī)補(bǔ)貼,確保先進(jìn)機(jī)型得到快速推廣應(yīng)用,并在應(yīng)用過程中逐步改進(jìn),提升谷物聯(lián)合收獲機(jī)的清選裝置技術(shù)先進(jìn)性[9]。
5 結(jié)語
綜上所述,清選裝置的工作能力對糧食收獲品質(zhì)影響很大,要進(jìn)一步保證糧食的有效收獲,必須要在結(jié)構(gòu)、功能布局、電氣控制等多個方面進(jìn)行優(yōu)化,從而實(shí)現(xiàn)清選質(zhì)量的進(jìn)一步提升,確保清選裝置適應(yīng)谷物聯(lián)合收獲機(jī)的高效率收獲要求。
猜你喜歡
品牌研究(2022年26期)2022-09-19 05:54:48
快樂語文(2021年36期)2022-01-18 05:49:06
中學(xué)生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
小天使·一年級語數(shù)英綜合(2021年10期)2021-10-20 02:41:35
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中學(xué)生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
中華詩詞(2019年7期)2019-11-25 01:43:04
中國生殖健康(2019年2期)2019-08-23 08:12:08
中國糧食經(jīng)濟(jì)(2018年11期)2018-12-27 08:58:42
影視與戲劇評論(2016年0期)2016-11-23 05:26:01