純電動環衛車電驅動系統參數匹配研究
2022-02-21 03:04:12趙金寶
汽車實用技術 2022年2期
趙金寶
純電動環衛車電驅動系統參數匹配研究
趙金寶
(河南工業貿易職業學院汽車工程學院,河南 鄭州 450000)
純電動環衛車已成為城市日常生活的重要組成部分,為提高其動力性及作業效率,文章以一種基于平行軸變速箱與行星排集成的多模高效電驅動系統構型的純電動環衛車為研究對象,首先對系統能夠實現的模式進行了分析,其次以純電動環衛車整車參數和動力性能為指標,分別匹配了驅動電機和作業電機峰值、額定功率、轉矩及最高轉速等參數,并搭建了整車動力學模型,通過仿真分析及系統臺架進行爬坡和加速能力測試,證明系統參數匹配的有效性。
環衛車;驅動系統;參數匹配;性能測試
前言
目前國內的新能源環衛車以純電動為主[1]。純電動商用車的底盤具有技術相對簡單、成熟、零排放、噪聲小等優點,適于環衛車作業,采用純電動環衛車能夠大幅降低大氣污染物含量,減少作業時的擾民問題,具有推廣的內在動力[2-3]。
針對我國純電動環衛車的應用需求,發展純電動環衛車越來越重要[4]。但現有純電動環衛車,作業、行駛電機無法復用,功率冗余大;電池配比重,整備質量高,作業能力差;驅動電機為直驅系統,滿載爬坡度在15%以下,東風底盤采用6擋變速器,滿載爬坡度在25%左右,與傳統燃油車相比均存在差距,在部分大爬坡度區域及惡劣路況時動力不足。因此,開展純電動環衛車雙電機耦合驅動匹配研究,為使純電動環衛車提高作業效率、降低能耗、拓寬環境適應提供了一種路徑,達到節能環保要求,其經濟和社會意義重大[5-6]。
1 研究對象
1.1 整車參數
本文以某款8.5噸壓縮式純電動垃圾車為研究對象,整車基本參數見表1。
表1 車型基本參數表
項目名稱參數 整車參數整車總質量/kg8 500 整備質量/kg6 350 風阻系數0.55 迎風面積/m25.4 滾動阻力系數0.008 輪胎型號215/75R17.5 滾動半徑/m0.372
結合產品實際運營工況,所要求的動力性指標有30分鐘最高車速≥100 km/h;最大爬坡度≥35%;0 km/h~50 km/h加速時間≤12 s;續駛里程≥250 km。
1.2 動力系統構型及工作模式
文中動力系統構型方案如圖1所示,采用雙電機分別通過平行軸變速箱和行星排,進行動力耦合的電驅動系統新構型。鎖止機構鎖止行星架,實現整車對動力系統的需求。該構型采用行星排連接2AMT結構,當變速箱結合套掛在Ⅰ位置,驅動電機端齒輪通過從動輪①連接傳動齒輪,由齒圈進行動力輸出,此時速比關系為變速箱的一擋;當變速箱結合套在Ⅱ位置,從動輪①②放空,不進行動力輸出,此時為空擋;當結合套掛在Ⅲ位置,驅動電機端齒輪通過從動輪②連接傳動齒輪,通過齒圈進行動力輸出,此時速比關系為變速箱的二擋。
作業裝置可通過氣壓離合器與作業電機端齒輪伸出軸相連,作業電機端齒輪通過從動輪③和行星架連接齒圈、太陽輪進行動力輸出。行星排結合套在兩個位置,分別用于對行星架的鎖止或分離,Ⅳ位置鎖止行星架與變速箱殼體,Ⅴ位置將行星架與殼體分離。
當氣壓離合器分離時,行星排結合套位于Ⅳ位置,行星排結合套鎖止,作業電機端齒輪通過從動輪③與太陽輪連接,最終由齒圈進行驅動動力輸出,驅動電機和作業電機共同提供整車驅動力;當氣壓離合器結合時,行星排結合套處于Ⅴ位置,行星排結合套分離,行星架和太陽輪空轉,驅動電機單獨提供整車動力,作業電機單獨驅動作業裝置進行作業。
該結構用一套動力系統同時滿足運輸和作業兩種使用需求。可實現換擋過程中無動力中斷,驅動和作業可以分開工作,實現停車作業、行駛作業、單獨行駛三種不同的工況,降低了系統功率及轉矩冗余,提高了系統效率。
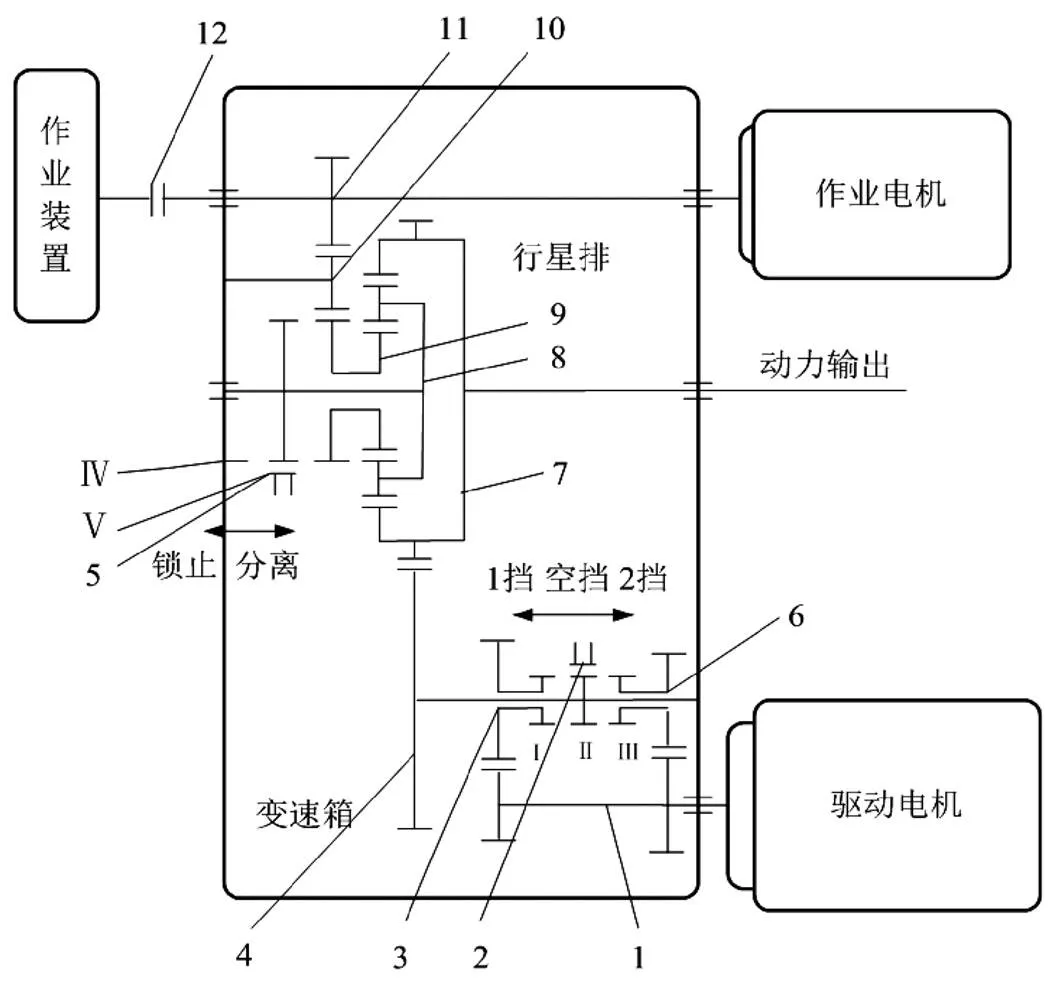
1—驅動電機端齒輪;2—變速箱結合套;3—從動輪①;4—傳動齒輪;5—行星排結合套;6—從動輪②;7—齒圈;8—行星架;9—太陽輪;10—從動輪③;11—作業電機端齒輪;12—氣壓離合器。
動力系統在工作過程中共有六種工作模式見表2。
表2 動力系統工作模式表
模式驅動電機兩擋箱擋位輔助電機行星架擋位動力傳遞路線圖 模式一工作一擋不工作分離2(a) 模式二工作二擋不工作分離2(a) 模式三工作一擋工作鎖止2(b) 模式四工作二擋工作鎖止2(b) 模式五不工作空擋工作分離2(c) 模式六工作一擋工作分離2(d)
圖2為該構型方案的在不同模式下的動力傳遞。

2 匹配設計
2.1 匹配設計原則
電驅動系統參數匹配是純電動環衛車研究的關鍵技術之一。合理的參數是純電動環衛車性能良好的根本保障,也是對其進行能量管理控制策略開發和優化的基本前提[7-8]。電驅動系統的構型方案確定后,結合純電動環衛車的動力性與經濟性需求,進行參數計算與匹配。
依據純電動環衛車運行工況,確定驅動電機和作業電機峰值、額定功率、轉矩及最高轉速等最優設計參數。
2.2 雙電機功率參數
首先要根據整車最高車速、加速性能、爬坡度等動力性需求,確定電驅動系統的總功率要求。純電動環衛車動力源最大功率由爬坡性能和加速性能指標決定。根據車輛動力學基礎理論,需推導出純電動環衛車在最大爬坡度和加速性能要求下的整車行駛需求功率,綜合得出動力源所需功率。車輛驅動阻力功率平衡行駛方程如下:

式中,是車輛行駛需求的功率,單位為kW;為傳動效率;是車輛整備質量,單位為kg;c是車輪滾動阻力系數;是重力加速度;是車輛的行駛速度,單位為km/h;是路面坡度角;是整車迎風面積,單位為m2;C是空氣阻力系數;是旋轉質量系數。
從最高車速、最大爬坡度、0 km/h~50 km/h加速時間的整車動力性要求出發,匹配兩個電機的額定功率與峰值功率。它們需要滿足純電動環衛車的整車動力性要求。
電驅動系統的額定功率和峰值功率計算:根據整車在平直道路上行駛最高車速100 km/h的要求,所需的動力系統持續功率為:

設定整車持續爬坡度8%、爬坡車速35 km/h,所需的動力系統持續功率為:

電驅動系統持續功率需大于等于上述條件的任意一個,即:
max≥(1,2)=80.8 kW (4)
根據最大爬坡度下,純電動環衛車要保持穩定車速所需要的功率以及車輛完全加速時所需的功率來確定電驅動系統峰值功率:
根據整車最大爬坡度35%以及爬坡車速15 km/h的設計要求,計算電機功率為:

根據車輛動力學原理,純電動環衛車在平直路面0 km/h~50 km/h加速時間≤12 s的設計要求,計算動力系統功率為:

電驅動系統峰值功率應該滿足上述條件的任意一個,即:
max≥(3,4)=130.5 kW (7)
綜上所述,電驅動系統所需峰值功率為130.5 kW,額定功率為80.8 kW。考慮該動力系統作業電機不能輔助驅動的極端條件下,需要單獨通過驅動電機來實現最高車速的需求,驅動電機峰值功率取132 kW,其額定功率確定為82 kW。作業電機主要用于上裝作業,根據現有車型選取所需功率,取峰值功率取38 kW,額定功率19 kW。
2.3 雙電機轉矩與轉速
純電動環衛車在爬最大坡度時,保持最低穩定車速所要克服的阻力轉矩即為電驅動系統需輸出的峰值轉矩,另外,該電驅動系統構型可通過驅動電機和作業電機協同工作來達到最大爬坡度的需求。
依照車輛最大爬坡度35%、爬坡車速15 km/h的設計要求,所需的電驅動系統峰值轉矩為:
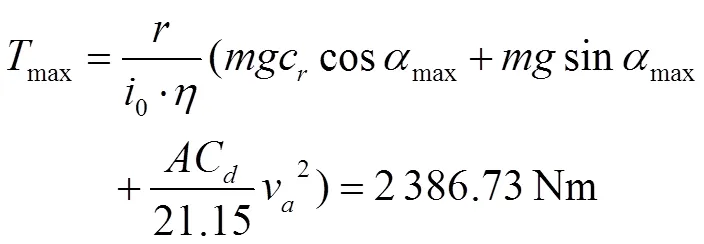
根據整車指標滿足最大爬坡度≥35%的需求和計算結果,設定一定的余量,最終確定動力系統峰值轉矩為2 520 Nm。整車控制邏輯規定,最大爬坡度需求轉矩由驅動電機一擋輸出轉矩和作業電機輸出轉矩通過行星排耦合輸出,根據平行軸變速箱速比關系和行星排特征值,確定純電動運環衛車驅動電機峰值轉矩為420 Nm,作業電機峰值轉矩為200 Nm。
根據電驅動系統峰值轉矩以及峰值功率,計算可得電機額定轉速為:
n=P·9 550/T(9)
通過計算可得:驅動電機額定轉速為3 000 rpm,作業電機額定轉速為1 800 rpm。
電機的額定轉矩計算如式:

通過計算可得:驅動電機額定轉矩為260 Nm,作業電機額定轉矩為100 Nm。
電驅動系統的最高轉速是車輛所能達到的最高車速,約束電驅動系統的峰值轉速:

式中:v是車速,單位為km/h;e是動力系統轉速,單位為rpm;為車輪滾動半徑,單位為m;o為主減速比。
通過計算可得,電驅動系統所需峰值轉速:3 479.65 rpm。
整車可通過驅動電機在變速箱AMT2擋,即變速箱速比是2的情況下,即可達到最高車速100 km/h,可得到電驅動系統所需峰值轉速為7 200 rpm。根據作業裝置通過作業電機轉速控制,可依據現有作業裝置匹配作業電機的峰值轉矩為5 400 rpm。
2.4 動力電池匹配
動力電池的電量設定需要按純電動環衛車整車續航里程的要求匹配。動力電池總電量的匹配設計,首先需要考慮電驅動系統及其他耗能電附件等的功率,其次還需要考慮電池SOC余量,最后還需考慮低溫條件下電池自加熱的功率需求。
動力電池參數匹配需要滿足電驅動系統總功率、續駛里程及高效率要求。動力電池的總功率需與雙電機總功率相匹配,即動力電池的輸出功率要大于驅動電機和作業電機總的峰值功率,否則不能達到純電動環衛車整車動力性能指標要求。
由于純電動環衛車整車只有動力電池是唯一能量來源,助力轉向、空氣壓縮機、加熱等附件全需要動力電池提供能量,相關零部件都要實現電動化。因此動力電池總功率還滿足電機峰值功率和電附件功率同時輸出時的功率需求:
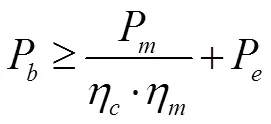
式中,P動力電池輸出功率,單位為kW;η為驅動電機效率;η為逆變器效率;P為電附件功率,單位為kW。
動力電池功率等于電池電壓與電流的乘積,因整車需求功率較高,電池電壓越低則系統電流越大,過大電流會加大高壓傳輸系統發熱損失,降低電驅動系統總效率,進而影響整車經濟性水平提升,因此,動力電池采用650 V的高電壓平臺。
根據汽車行駛方程式,可計算出純電動環衛車以V勻速行駛時的整車需求功率P:

進而,可計算出按此車速行駛完,該純電動環衛車續駛里程所需要的能量:
W=P·(/V) (14)
式中,P為純電動環衛車整車需求功率,單位為kW;V為車輛勻速行駛時的車速,單位為km/h;W為車輛續駛里程內所需能量,單位為度;為純電動環衛車續駛里程,單位為km。
另外,動力電池SOC不可以降低為0,為0時會造成動力電池“過放”,影響動力電池使用壽命。從純電動環衛車實際運營的角度出發,一般在動力電池SOC剩余不足20%后,需要給動力電池充電。因此,動力電池最終電量,在結合續駛里程進行計算后,還需要考慮剩余SOC問題,計算公式如下所示:
式中,ξ為動力電池可用SOC范圍;η為動力電池系統充放電效率。根據整車指標,計算結果如下:
電池容量應大于152.8 kWh,持續放電功率應大于105 kW,峰值放電功率應大于306 kW。
表3 雙電機與變速箱主要參數表
指標參數 驅動電機功率(額定/峰值kW)82/132 轉速(額定/峰值rpm)3 000/7 200 扭矩(額定/峰值Nm)260/420 作業電機功率(額定/峰值kW)19/38 轉速(額定/峰值rpm)1 800/5 400 扭矩(額定/峰值Nm)100/200 行星排特征值2.63 平行軸變速箱速比5.025/2.029 動力電池電池容量153 持續放電功率/kW105 峰值放電功率/kW306
基于純電動環衛車整車參數和動力性能指標,完成了驅動電機和作業電機分別通過平行軸變速箱和行星排,進行動力耦合的電驅動系統參數匹配,最終的參數匹配結果見表3。
3 整車模型建立及仿真
基于Simulink仿真工具,搭建了純電動環衛車整車動力學模型,以分析純電動環衛車的動力性和經濟性。通過對現有純電動環衛車整車構型及動力系統分析,建立與實車關鍵部件相對應的模塊,建立整車模型,具體如圖3所示。主要包括整車控制器模型、駕駛員模型、輪胎模型、車體模型、車輪模型、路面模型。

圖3 純電動環衛車整車動力學模型
對于經濟性能指標,分別基于等速法與工況法(C-WTVC),對純電動環衛車整車經濟性進行了仿真,結果見表4。
表4 純電動環衛車仿真結果
工況百公里耗電量/kWh最大爬坡度/%0~50km/h加速時間/s 40 km/h等速31.6356.1 C-WTVC34.3
經仿真分析,驅動電機在變速箱1擋和作業電機耦合工作時,最大爬坡度可超過35%,在驅動電機1擋和作業電機耦合工作時加速最快,0 km/h~50 km/h加速時間約為6.1 s,驗證了新構型電驅動系統參數匹配的有效性。
4 試驗臺架測試
試驗臺架主要由測功機、電池模擬器、操作控制系統、數據采集系統、冷卻裝置和功率分析儀組成,如圖4所示。其中,測功機具有電機扭矩、轉速的測試功能;電池模擬器可以提供且回饋電能;操作控制系統主要由測試臺、測試軟件和監控軟件構成,用以實現實驗過程中的數據測量和狀態監控等;冷卻裝置主要為被測動力系統的冷卻系統提供冷卻水;功率分析儀用于測試電機的電壓、電流和電功率等參數。

圖4 試驗臺架
動力系統在臺架上調試完成后,分別進行了動力系統峰值轉矩、最高轉速測試。結果如表5所示,與匹配值相差不大,證明了匹配的有效性。
表5 動力系統臺架性能測試結果
測試項匹配值實測結果 動力系統峰值轉矩/Nm2 3872 410 動力系統最高轉速/rpm3 4803 615
5 結論
本文以一種基于平行軸變速箱與行星排集成的多模高效電驅動系統構型的環衛車為研究對象,基于純電動環衛車整車參數和動力性能指標,匹配驅動電機和作業電機峰值、額定功率、轉矩及最高轉速等參數。搭建了整車動力學模型,通過仿真分析,整車的最大爬坡度達到35%,0 km/h~50 km/h的加速時間為6.1 s,C-WTVC工況下整車的百公里電耗為34.3 kWh。搭建系統測試臺架并進行了動力系統峰值轉矩和最高轉速測試,證明系統參數匹配的有效性。
[1] 華泰證券.新能源環衛車行業專題報告[R].未來智庫,2020.
[2] 季明燁.新能源環衛車現狀及發展態勢分析[J].專用汽車, 2015(09):62-64.
[3] 王建建,劉效磊.新能源專用車市場發展現狀與趨勢判斷[J].專用汽車,2016(03):53-56.
[4] 屈孝和,范帥,劉飛霞.輪邊驅動單發動機道路洗掃車的研究[J].建設機械技術與管理,2014(08):93-96.
[5] 閻備戰,張曉偉,左利鋒,等.一種純電動環衛車動力系統及環衛車:CN201810127989.0[P].
[6] 金鑫君,羅方贊,鄭麗輝,等.基于ADVISOR純電動汽車動力系統參數匹配優化研究[J].機械工程師,2017(10):96-98.
[7] 王君銀,何鋒,楊冬根,等.純電動商務車動力系統匹配與性能仿真[J].機械設計與制造,2017(08):235-238.
[8] 李紅朋,胡明輝,謝紅軍,等.基于工況分析法的電動汽車參數匹配[J].重慶理工大學學報(自然科學),2013,27(1): 13-17.
Research on Parameter Matching of Electric Drive System of Pure Electric Sanitation Vehicle
ZHAO Jinbao
( College of Automotive Engineering, Henan Industry and Trade Vocational College, Henan Zhengzhou 450000 )
Pure electric sanitation vehicle has become an important part of urban daily life. In order to improve its power performance and operation efficiency, this paper takes a pure electric sanitation vehicle with multi-mode high-efficiency electric drive system configuration based on the integration of parallel shaft gearbox and planetary row as the research object. Firstly, the mode that the system can realize is analyzed, Secondly, taking the whole vehicle parameters and dynamic performance of the pure electric sanitation vehicle as the index, the peak value, rated power, torque and maximum speed of the driving motor and working motor are matched respectively, and the whole vehicle dynamic model is built. The effectiveness of the system parameter matching is proved by simulation analysis and the climbing and acceleration ability test of the system bench.
Sanitation vehicle;Driving system;Parameter matching; Performance testing
U469.72
A
1671-7988(2022)02-01-06
U469.72
A
1671-7988(2022)02-01-06
10.16638/j.cnki.1671-7988.2022.002.001
趙金寶(1986—),男,助教,碩士研究生,就職于河南工業貿易職業學院汽車工程學院,主要研究方向為新能源汽車整車匹配及控制。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08