二維展開太陽翼地面展開試驗裝置設計與驗證
2022-02-21 05:19:24任守志商紅軍賈文文管帥鄭樹杰姚迪王寧
航天器工程 2022年1期
任守志 商紅軍 賈文文 管帥 鄭樹杰 姚迪 王寧
(1 北京空間飛行器總體設計部,北京 100094)(2 北京衛星制造廠有限公司,北京 100094)
一維展開太陽翼展開過程中各電池板的質心均在同一個平面內,通過吊掛點始終在水平面內的地面展開試驗裝置完成地面展開試驗,這種方式簡單、可靠,廣泛應用于一維展開太陽翼[1-3]。隨著技術的發展,高分辨率遙感衛星對太陽翼展開剛度要求越來越高,一維展開太陽翼已無法滿足其要求,大型通信衛星對功率需求也越來越高,因此出現了二維展開太陽翼,這種太陽翼展開后慣量小,在同等質量的情況下具有更高的展開基頻,但二維展開太陽翼展開過程中電池板的質心位置在水平面內和豎直面內均有運動,這給二維展開太陽翼地面展開試驗時的重力卸載提出了較大的挑戰[4-6]。
國外較早開展了二維展開太陽翼的研制,在遙感衛星領域快鳥-2(Quickbird-2),世界觀測(WorldView)衛星均采用了3塊電池板并聯構型的二維展開太陽翼;在通信衛星領域,泰雷茲-阿萊尼亞公司為SpaceBus衛星新平臺研制的太陽能平臺(SolarBus)[7],波音公司研制的BSS 702平臺均采用了二維二次展開太陽翼,單翼最多可配置10塊電池板[8],但這些太陽翼的地面展開試驗裝置均未見報道。
我國上海實達實業公司針對某二維展開太陽翼提出了地面展開試驗裝置的專利[9],專利所述裝置在每個電池板上施加配重用于平衡太陽翼重力,且使用數量較多的導軌用于引導太陽翼的展開,方案相對復雜,為簡化太陽翼地面展開重力卸載,本文設計了一種適用于二維展開太陽翼的地面展開試驗裝置,并對其在某二維太陽翼上的使用情況進行了分析和驗證。
1 某二維展開太陽翼簡介
某高分辨率遙感衛星采用了二維展開太陽翼方案,此太陽翼包括3塊電池板,中心板與2塊側板外形尺寸相同,均為2200 mm×1200 mm,如圖1所示[10]。
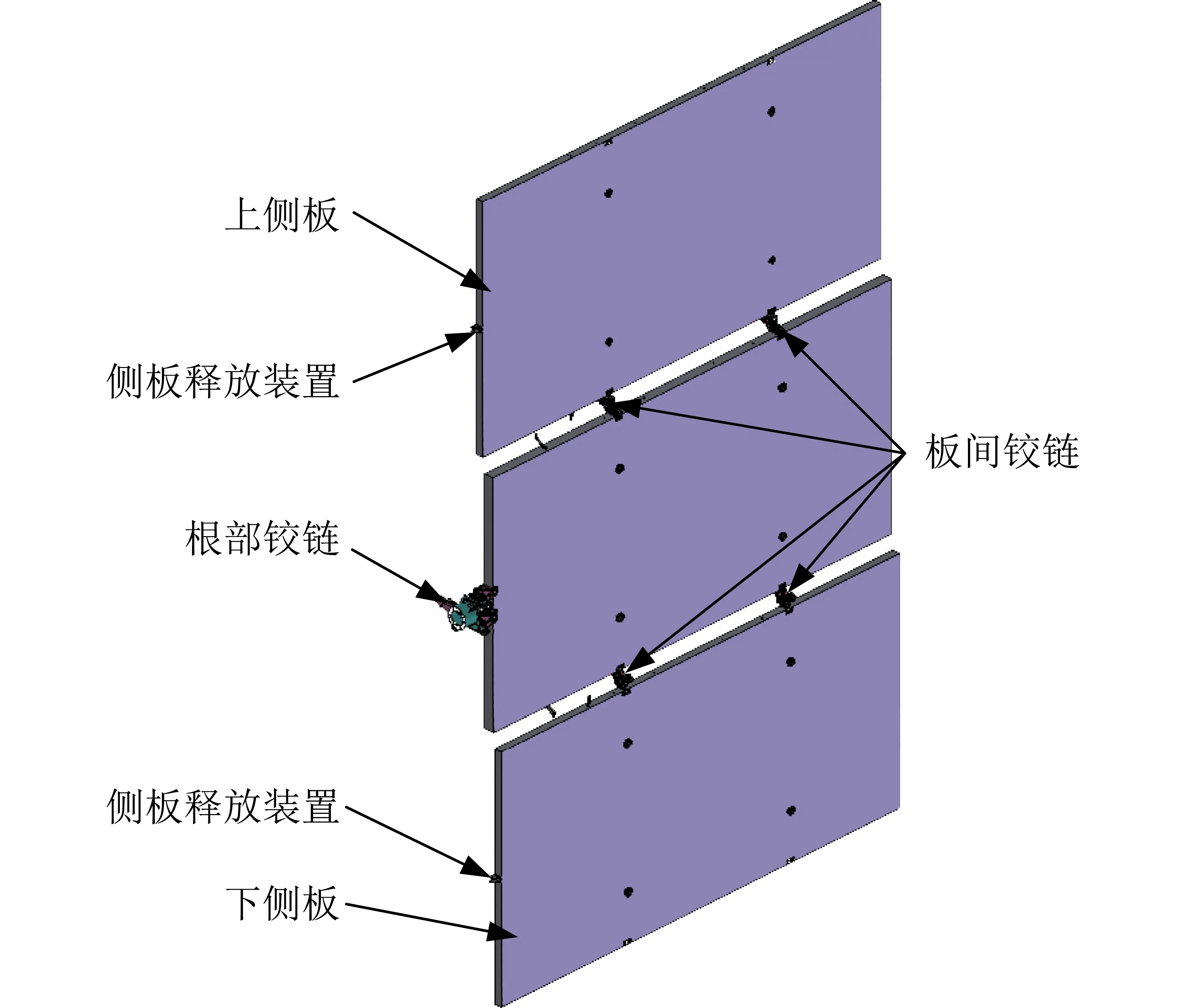
圖1 某二維展開太陽翼組成(展開狀態)
二維展開太陽翼的展開過程分兩步:首先,壓緊釋放裝置釋放對太陽翼的約束,與中心板相連的根部鉸鏈驅動3塊電池板一次展開,在此過程中,3塊電池板通過側板釋放裝置連接在一起;其次,當根部鉸鏈即將展開到位時,根部鉸鏈觸發側板釋放裝置解鎖,二次展開開始,上、下側板在側板鉸鏈的驅動下分別展開180°并鎖定。太陽翼在軌展開過程如圖2所示。
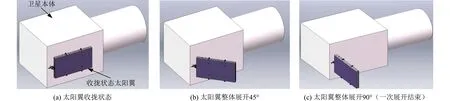
圖2 某二維太陽翼在星體上的展開過程示意圖
由圖2(f)可知,太陽翼兩次展開過程中中心板的質心在平面內,但上、下側板的質心既有水平面內運動,也有豎直面內的運動,這給二維太陽翼的地面展開過程中的重力卸載造成了較大的困難。
2 二維太陽翼地面展開試驗裝置設計
為實現二維太陽翼地面展開過程中的重力卸載,本文設計了一種二維太陽翼重力卸載裝置,它原理簡單,使用方便,且可以實現二維太陽翼在地面展開過程中各電池板的重力卸載。
2.1 設計原則
二維太陽翼地面展開試驗時,地面試驗裝置需要盡量實現太陽翼各部件在任意位置的重力卸載,能夠使太陽翼各部件在零重力/零重力矩環境下的運動,不能引入主動力,盡量減小地面設備對太陽翼展開過程的影響[11]。
2.2 二維太陽翼展開過程中主要構型變化
由圖2(a)~(c)可知,太陽翼在一次展開過程中3塊電池板收攏疊合在一起,整體質心僅在水平面內變化,且整體繞根鉸轉軸作定軸轉動,因此太陽翼一次展開過程中通過繩索連接繞定軸轉動的桿件實現3塊板整體的重力卸載;太陽翼二次展開過程上、下側板分別向上和向下運動,兩者質心均不在水平面內運動,運動軌跡為繞側板鉸鏈軸線的圓弧運動,上、下側板展開過程軌跡如圖3所示。
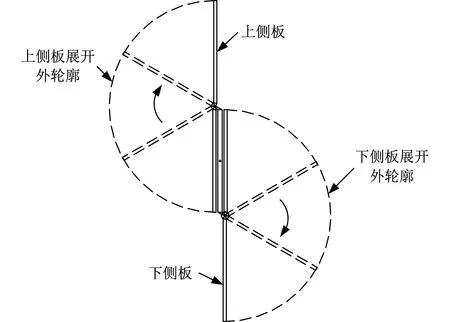
圖3 二維太陽翼上、下側板二次展開軌跡外輪廓
側板鉸鏈分別與上、下側板和中心板相連,側板鉸鏈轉軸與各電池板之間相對位置關系如圖4所示。
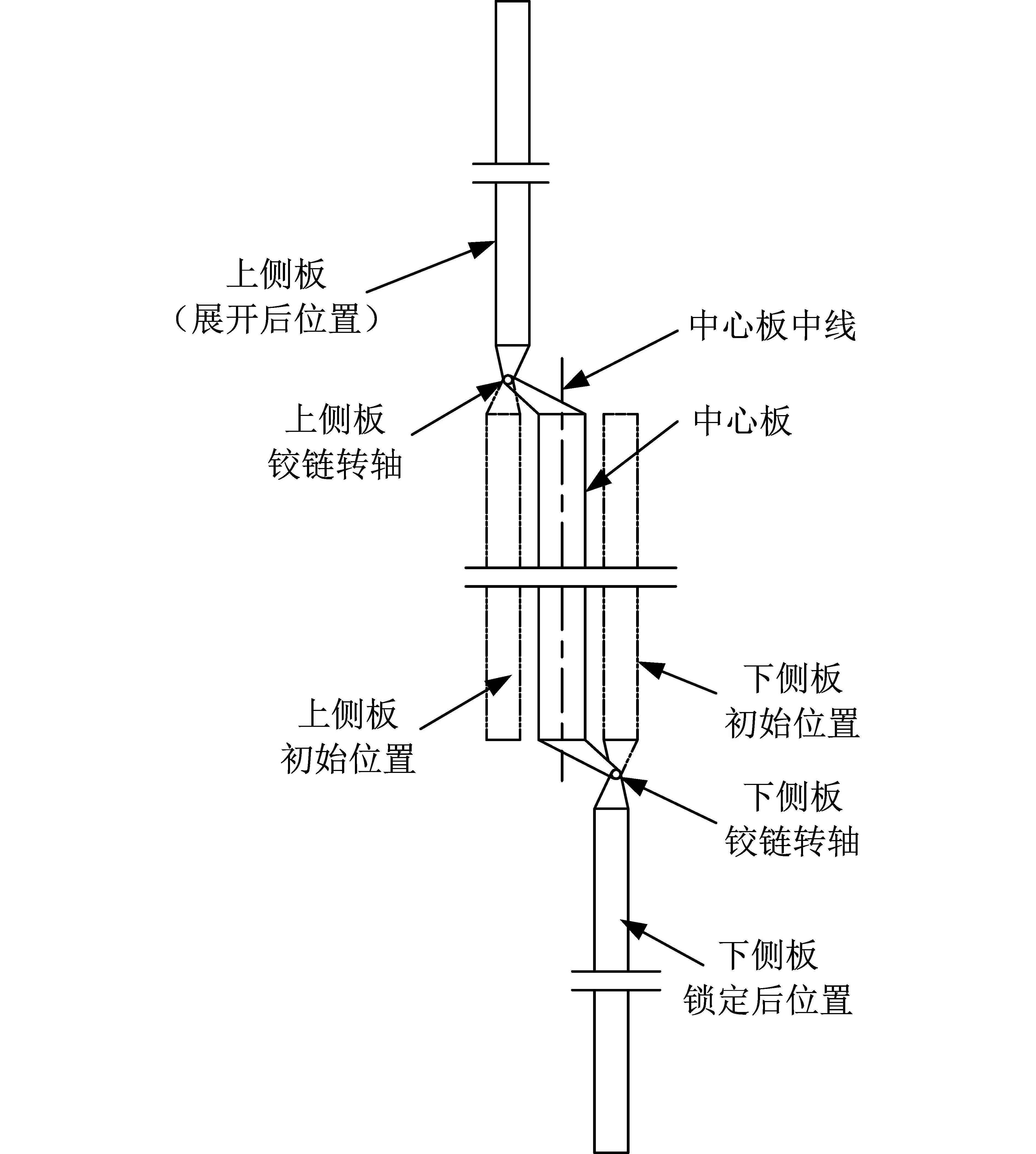
圖4 二維太陽翼上、下側板二次展開前后位置及側板鉸鏈轉軸位置
2.3 展開試驗裝置組成
由圖3可知,太陽翼上、下側板展開軌跡均為圓弧,而且上、下側板外形尺寸完全相同,質量也相同,上側板向上翻轉,下側板向下翻轉,因此設計了一種通過上、下側板質量互相平衡的裝置實現太陽翼的地面展開[12],如圖5所示。
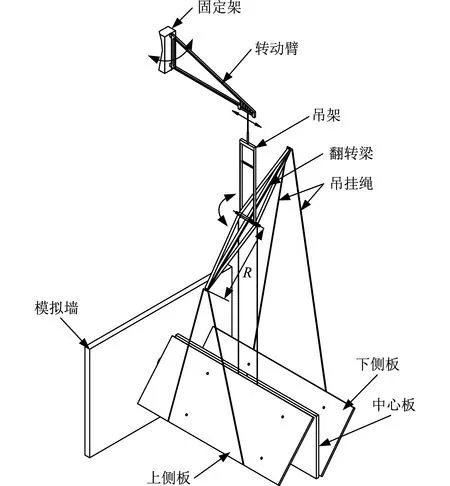
圖5 太陽翼重力卸載裝置與太陽翼的連接關系
此太陽翼重力卸載裝置包括固定架、轉動臂、吊架、翻轉梁、吊掛繩、繩索長度補償塊。固定架為放置在地面上的剛性構架,轉動臂通過轉軸與固定架相連且可繞固定架上的轉軸轉動,在太陽翼一次展開過程中承受三塊電池板以及吊架、翻轉梁等部件的質量,從而實現太陽翼各部件在水平面運動時的重力卸載。吊架與轉動臂的外側相連,翻轉梁與吊架下端通過轉軸連接,上、下側板吊掛繩索一端分別與翻轉梁上下端部連接,另一端與上、下側板的側邊固連的繩索長度補償塊相連;中心板吊掛繩索一端與中心板相連,另一端與翻轉梁轉軸連接。
由于上、下側板展開前后位置在豎直方向并不在一個面內,因此需要通過繩索長度補償塊實現其重力卸載,所設計的上、下側板二維展開重力卸載工裝與各電池板的連接關系如圖6所示。
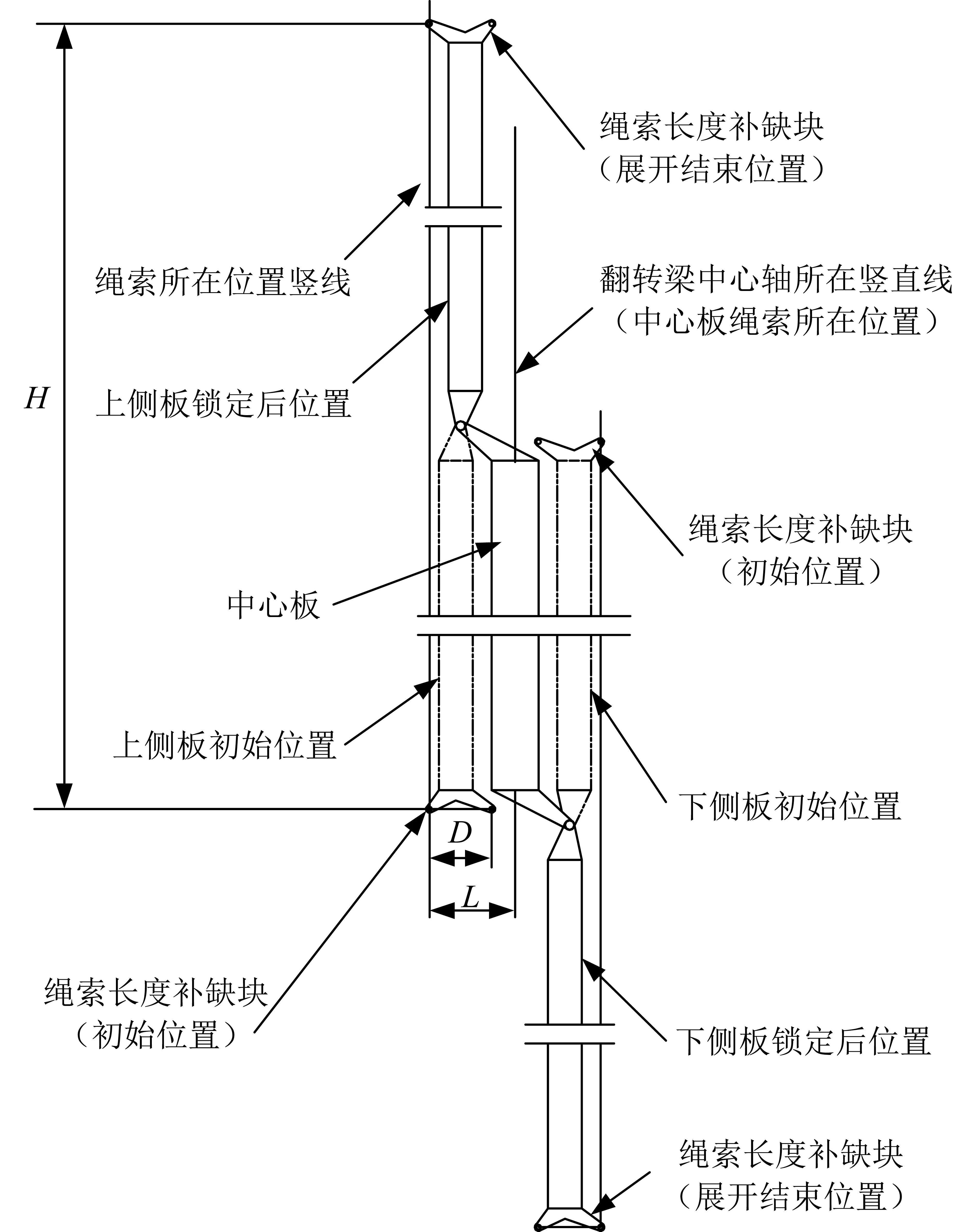
圖6 二維太陽翼上、下側板重力卸載原理
為實現上、下側板在展開前后繩索中張力保持不變,上、下側板繩索長度補償塊的長度應保證上、下側板展開前后,上、下側板吊繩在與上、下側板垂直的豎直面上的投影重合。翻轉梁上、下側板連接點與翻轉梁轉軸之間的長度為R,如圖5所示,其長度應滿足
(1)
式中:H為上、下側板在展開前后吊掛點在豎直方向上的位移,D為繩索長度補償塊與繩索兩接觸點的寬度;L是側板吊掛繩索與中心板吊掛繩索在與板面垂直的面上投影線的距離。
在實際使用時,上、下側板吊繩、中心板吊繩中均設置預緊力,其中上側板吊繩、下側板吊繩的預緊力的大小分別等于上側板、下側板重力的一半,中心板吊繩中的預緊力等于上、下側板重力之和的一半與中心板的重力以及上、下側板鉸鏈的重力之和,此設計可實現上、下側板在展開過程中的重力矩平衡。
3 重力卸載裝置使用過程動力學分析
為驗證二維太陽翼地面展開試驗裝置設計的合理性,需要建立二維太陽翼和地面展開試驗裝置的地面動力學聯合分析模型,獲取太陽翼展開過程中各電池板重力卸載情況,從而分析此地面展開試驗裝置設計的有效性。
3.1 動力學模型
用NASTRAN有限元軟件計算了中心板和上、下側板正交化的固定界面模態(Craig-Bampton),并把其柔性體信息導入ADAMS軟件中,然后建立了各部件的連接關系,并根據鉸鏈實測驅動參數建立了太陽翼的展開動力學模型以及第2節介紹的二維太陽翼地面展開試驗裝置的模型,并根據試驗裝置的實際質量及彈簧剛度等數據設置模型相關數據。另外,由于在地面展開,模型中還考慮了運動部件摩擦力、空氣阻力等影響因素[2]。
太陽翼在展開試驗裝置上的動力學模型如圖7所示,模型中電池板為柔性體,轉動臂、翻轉梁、吊架、長度補償塊等都為剛性體,翻轉梁與電池板之間用彈簧元連接,彈簧根據所連接電池板質量設置預緊力。其中彈簧剛度為2 N/mm,各繩索中的初始吊掛力見表1。
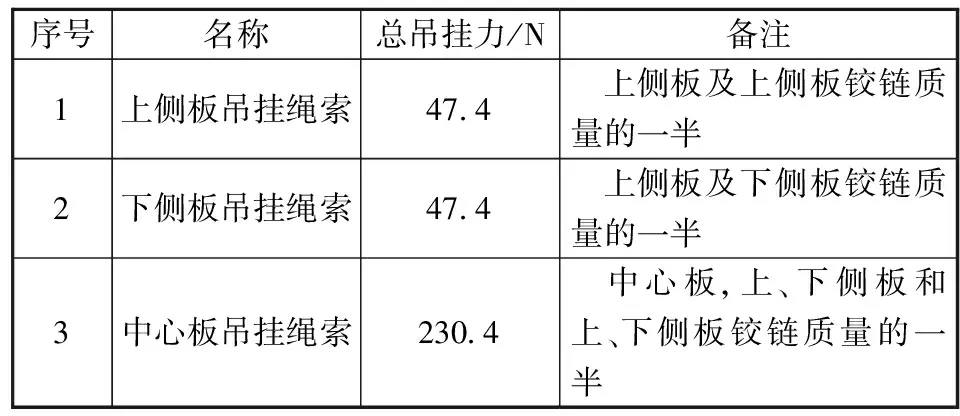
表1 各電池板吊掛繩索中的力
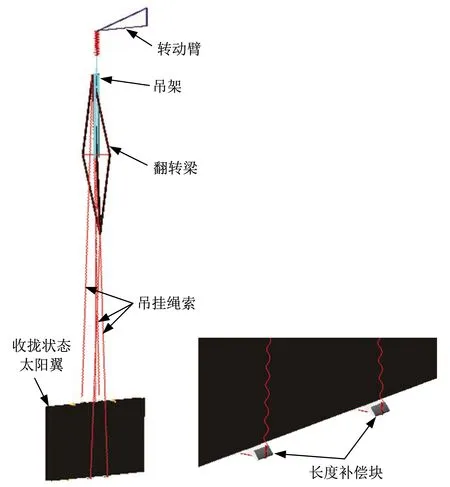
圖7 二維展開太陽翼地面展開試驗動力學模型
為減少工裝在使用過程中的變形,對各工裝進行了加強設計,各工裝的實際測量的質量見表2,模型中根據工裝實際質量進行設置。
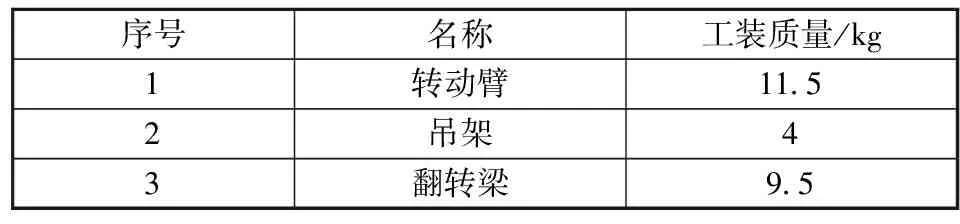
表2 模型中與太陽翼相連的工裝重量
3.2 動力學分析結果
對建立的動力學模型進行了仿真分析,分析結束時間從初始到上、下側板均鎖定結束后再仿真24 s,在此時間段內觀察上、下側板繩索中張力的變化規律,以驗證展開試驗裝置對上、下側板重力卸載的效果。太陽翼在地面展開試驗裝置上展開仿真過程如圖8所示。

圖8 太陽翼地面展開過程仿真
根部鉸鏈在太陽翼展開鎖定過程中鎖定沖擊力矩如圖9所示。
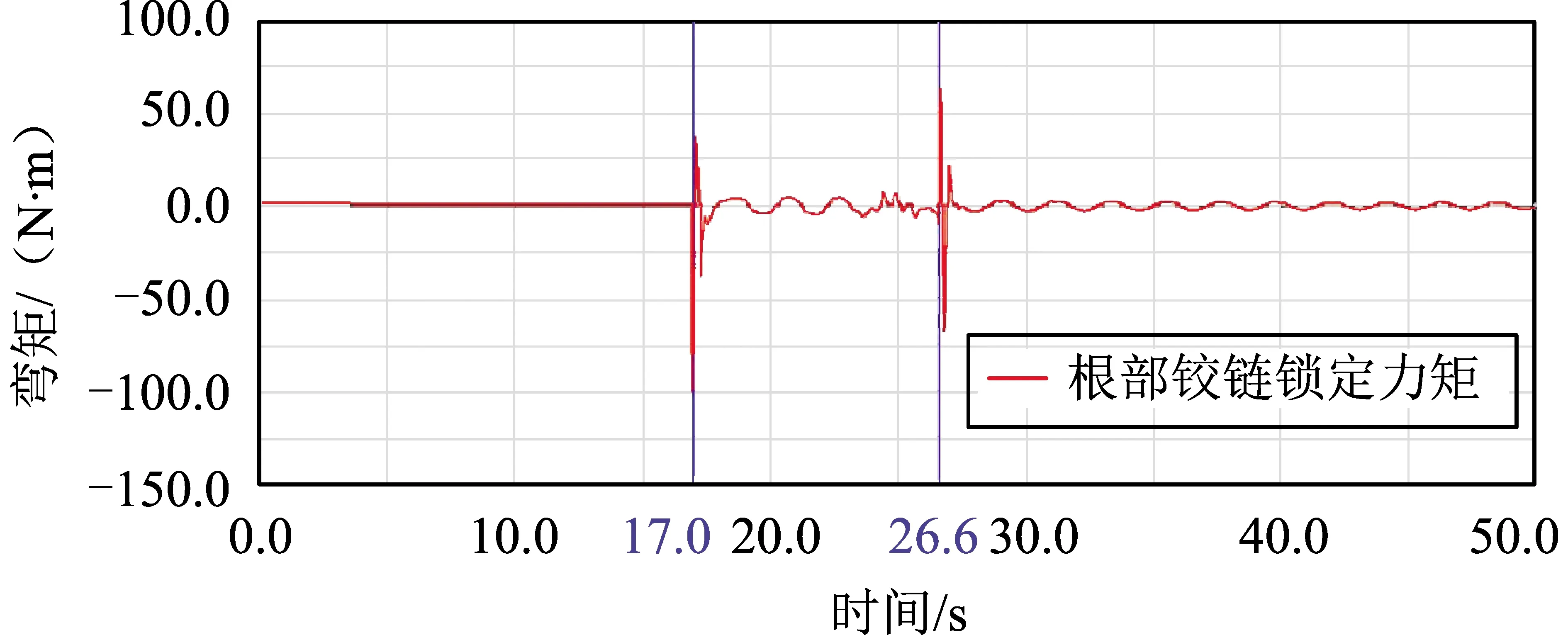
圖9 太陽翼展開過程中根部鉸鏈鎖定沖擊力矩曲線
由圖9可知,太陽翼在一次展開鎖定時間為17.0 s,二次展開鎖定時間為26.6 s,且與實際產品地面展開試驗數據基本一致。中心板、上側板、下側板吊掛繩索中的張力分別如圖10、圖11和圖12所示。

圖10 中心板吊掛繩索中張力
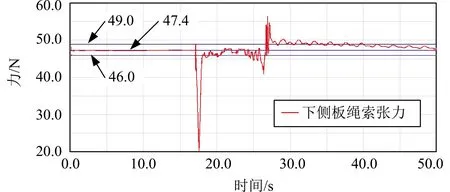
圖11 下側板吊掛繩索中張力
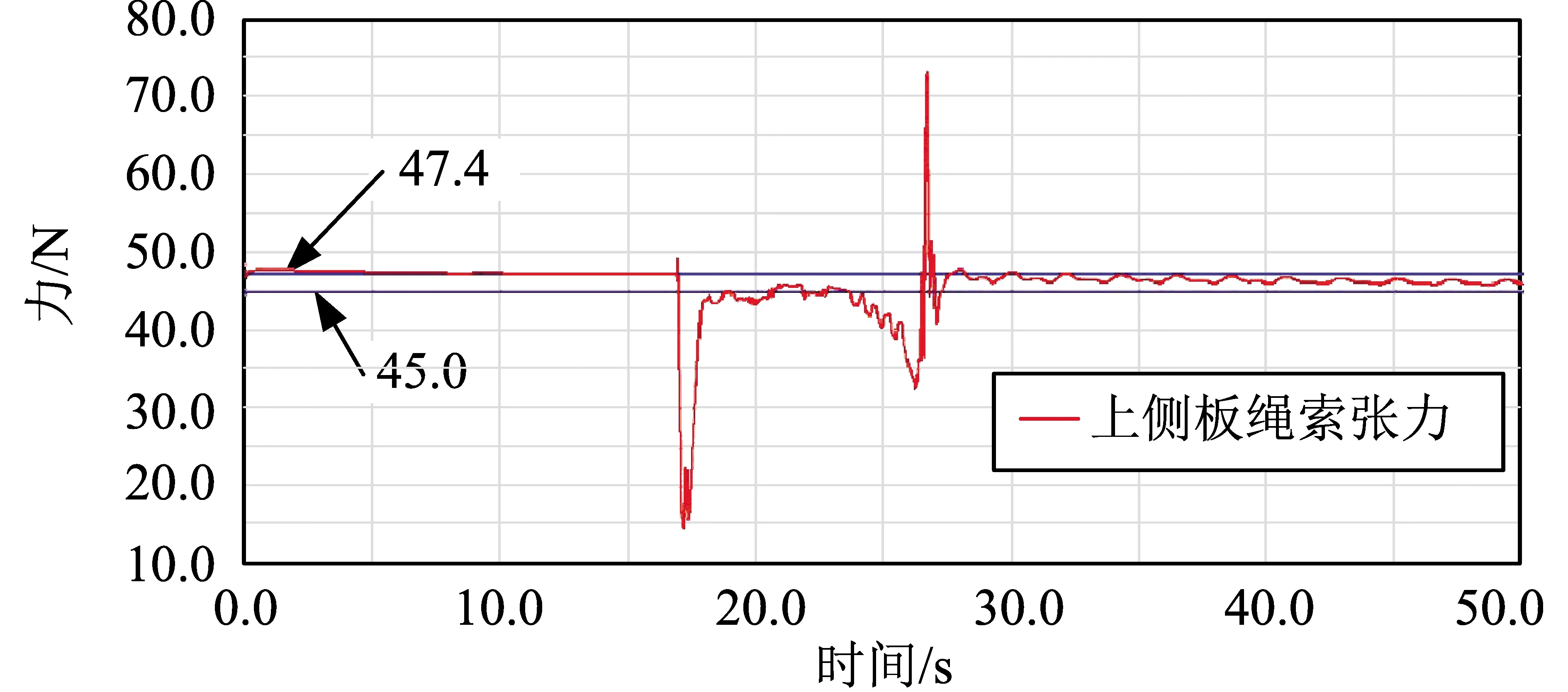
圖12 上側板吊掛繩索中張力
由圖9~12可知,在根部鉸鏈鎖定前,即17.0 s之前,吊掛繩索中的張力保持穩定,中心板張力保持在230.4 N,上、下側板中繩索張力均保持在47.4 N。在根部鉸鏈鎖定時,由于翻轉梁和轉動臂、吊架處于運動狀態,且存在較大的慣性,而與上、下側板相連的中心板在根部鉸鏈轉動方向上被限制,導致與上、下側板和翻轉梁相連的繩索張力在短時間內變化較大,但很快恢復,在上、下側板上下翻轉過程中(見圖8(c)),由于翻轉梁、轉動臂慣性的存在,繩索在中間展開過程中張力略有變化,下側板變化范圍為45.6~47.9 N,上側板變化范圍為44.0~45.9 N,最大變化量僅為3.4 N,變化量約7%,而中心板繩索張力最大變化量約為5 N,變化量僅2.1%。
當上、下側板鉸鏈鎖定前后,由于側板展開速度的增加以及翻轉梁慣性的影響,導致繩索中張力變化很大,上側板和下側板繩索中張力變化范圍分別達到33~73 N和41~56 N,而太陽翼展開穩定后,上、下側板繩索中張力穩定在46.5 N和47.8 N,與初始預緊力47.4 N的張力十分接近,最大變化量不超過2%,中心板吊掛繩索張力最終穩定在230.7 N,與初始230.4 N基本相同,說明本二維太陽翼展開試驗裝置可以實現中心板及上、下側板的重力卸載。
4 地面試驗驗證
某二維太陽翼使用了本文設計的地面展開試驗裝置,如圖13所示,太陽翼地面展開過程正常,太陽翼4次地面展開時間在25.56~28.6 s之間,太陽翼在展開裝置上的展開過程如圖14所示[10],太陽翼地面展開運動平穩,所有鉸鏈均鎖定良好,驗證了二維太陽翼展開試驗裝置設計的正確性及工作性能,試驗前后吊掛繩索中的張力見表3,太陽翼展開后繩索張力與展開前基本一致,最大變化量不超過1 N,說明了此二維太陽翼地面展開試驗裝置可有效實現其地面二維展開過程中的重力卸載。
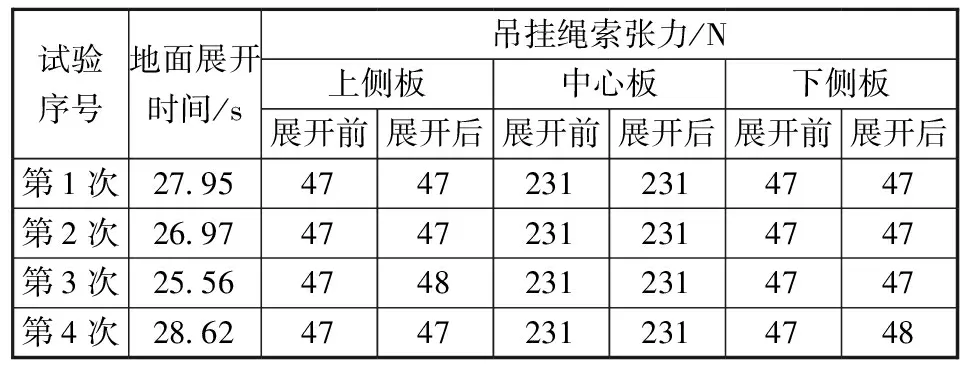
表3 太陽翼地面展開試驗數據
5 結論
本文設計了一種適用于二維展開太陽翼地面展開試驗裝置,并進行了動力學分析及試驗驗證,可得到以下結論。
(1)本文所設計的二維展開試驗裝置結構簡單,可以連續實現二維太陽翼各部件在一次和二次展開過程中水平面內和豎直面內的重力卸載,無需中間更換工裝。
(2)建立了太陽翼和地面展開試驗工裝的展開動力學模型,考慮了工裝質量、摩擦阻力以及空間阻力的影響,分析得到除太陽翼一次和二次鎖定前后瞬間外,其余展開過程中吊掛繩索張力最大變化量僅為7%,展開結束后,各電池板吊掛繩索的張力變化最大不超過2%。
(3)由某二維太陽翼在本試驗裝置上展開前后試驗結果可知,太陽翼各電池板吊掛繩索中的張力變化最大僅1 N,變化量僅2.1%,與分析結果一致,說明本二維太陽翼地面展開試驗裝置可有效實現太陽翼在地面展開前后的重力卸載。
隨著航天技術的發展,越來越多的空間機構具有二維甚至多維展開功能,對地面展開試驗也提出了較高的挑戰,本文設計的太陽翼地面展開試驗裝置實現方式簡單可靠,可為這些展開機構的地面展開驗證提供必要的技術參考。