基于樹莓派的嵌入式智能安全帽設計與實現
2022-02-22 13:34:12馬曉慧劉新愷馬鑫磊王平川
物聯網技術 2022年2期
馬曉慧,劉新愷,2,馬鑫磊,王平川,趙 康
(1.新疆工程學院,新疆 烏魯木齊 830023;2.中國廣核新能源控股有限公司安徽分公司,安徽 合肥 238056)
0 引 言
按照“碳達峰、碳中和”的政策引領,全國風電裝機容量規模將持續提升,隨之而來的是風電開發與維護的安全監管問題日益突出。與傳統電廠不同,當前新能源發電場站具有地理位置偏遠、占地面積大、運維人員少、檢修工序多等特點,針對風電機組的登高作業空間有限、第三方外包人員管理困難、緊急事故通信受限等問題,亟需對當前的安全生產監管方法進行優化與改進。
當前廣泛應用于電力行業的安全帽僅具有被動防護的單一功能,在智能化及信息化方面還處于概念設計階段。文獻[2]提出適用于電力作業的可穿戴安全監護平臺,對智能安全帽的硬件結構進行設計。文獻[3]對智能化安全帽的設計指標及過程進行了系統且全面的闡述,并搭建了Android手機端管理軟件平臺。文獻[4]以物聯網為載體,增加人臉識別功能,使安全帽成為電力設備的感知端和通信端。文獻[5]開發了適用于電網巡檢的智能安全帽系統和與之配套的智能安全柜,并進行了效果驗證。
結合風電場運行維護安全監管需求,提出基于樹莓派的嵌入式智能安全帽設計,在不改變安全帽結構及防護功能的基礎上,通過增加智能化元件及遠程管理平臺,實現實時定位、視頻監控、實時通信、安全照明、后臺管理等功能。監控系統可以監控現場工作人員的操作是否按照工作票規范執行。同時,在遇到重大故障時能迅速將故障信息反饋到中控室,實現遠程指揮,提高時效性。另外,將安全帽與定位相結合,如果發生緊急情況,工作人員可通過定位系統快速到達現場。
1 系統總體設計
該系統總體設計包括系統硬件設計、系統環境設計、定位功能設計、監控功能設計、UI界面設計。將3B+樹莓派、L76X GPS HAT定位芯片、攝像頭、LED燈等元件集成嵌入在安全帽上,將樹莓派作為控制系統,將Nginx模塊作為直播服務器,在局域網下通過網絡連接PC端,滿足實時監控、實時定位、安全照明等功能需求。
系統總體設計如圖1所示。

圖1 系統總體設計
2 系統硬件設計
2.1 樹莓派
樹莓派3B+硬件參數:型號為博通BCM2837B0 SoC,集 成 四 核 ARM Cortex-A53(ARMv8)64位 @ 1.4 GHz CPU。主要接口:HDMI、以太網、4×USB 2.0、3.5 mm模擬音頻視頻插孔、MicroSD插槽。其他接口:DSI顯示屏、40 pin,CSI相機接口、擴展雙排插針(PoE)接口。有線網絡:千兆以太網(USB 2.0通道,最大吞吐量300 Mb/s)。無線網絡 :2.4 GHz和5 GHz雙頻WiFi,支持802.11b/g/n/ac。內存 :1 GB LPDDR2 SDRAM。藍牙:藍牙4.2&低功耗藍牙(BLE)。存儲:Micro-SD。供電接口/要求:micro USB(5 V/2.5 A)。尺寸:85 mm×56 mm×19.5 mm。重量:50 g。
2.2 定位芯片
采用L76X GPS HAT定位芯片,其具有GNSS(全球導航衛星系統)功能,支持GPS,BD2和QZSS等定位系統。
硬件參數:接收信道包括33個跟蹤信道,99個捕獲信道和210個PRN信道。接收信號為GPS,BD2和QZSS。信號頻段為 GPS L1(1 575.42 MHz),BD2 B1(1 561.098 MHz)C/A Code。捕獲時間:冷啟動時10 s(最快);熱啟動:1 s。捕獲靈敏度為-148 dBm,跟蹤靈敏度為-163 dBm,重捕捕獲靈敏度為-160 dBm,定位精度小于2.5 mCEP,串口通信波特率范圍為4 800~115 200(默認9 600)。
2.3 攝像頭
采用樹莓派標準版攝像頭(Raspberry Pi Camera v2),具體參數:8百萬像素,系統支持新版本Raspbian,擁有專門的CSI接口及Sony IMX219PQCMOS圖像傳感器,尺寸為25 mm×23 mm×9 mm。
2.4 其他硬件
安全帽采用符合國標質檢要求的標準安全帽,LED采用直流驅動,電壓范圍為1.5~3.5 V,電流為15~18 mA,采用有線式耳機。
3 系統軟件設計
軟件系統的設計主要分為系統環境設計、定位系統軟件設計、監控系統軟件設計、UI界面設計。
3.1 系統環境設計
系統環境設計主要分為樹莓派燒錄和配置、安裝Python3 PyQt5庫文件、導入OpenCV環境進行搭建,為后期調用攝像頭和設置UI界面做準備。系統環境搭建流程如圖2所示。
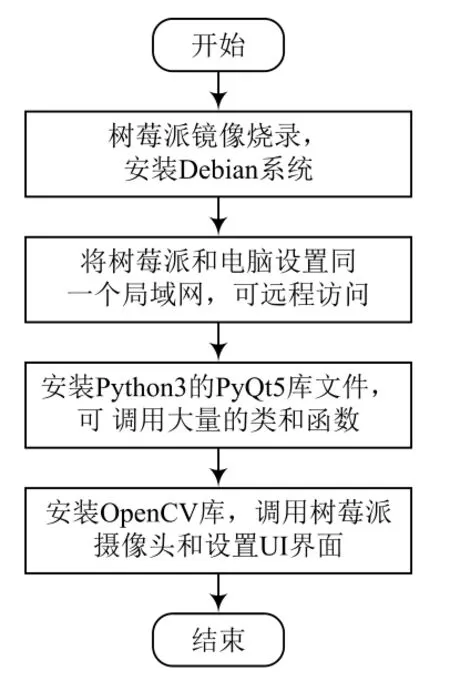
圖2 系統環境搭建流程
3.2 定位系統軟件設計
定位系統軟件設計通過L76X GPS HAT芯片獲取當前位置,得到經緯度坐標,并經過百度地圖修正后將經緯度坐標儲存在gsp.json文件中。接著,由PC端利用HTTP實時獲取樹莓派位置并顯示在地圖中。軟件設計流程如圖3所示。
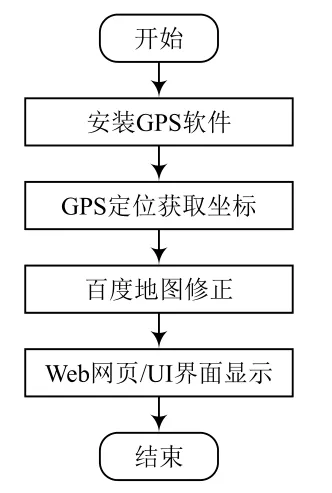
圖3 定位系統設計流程
具體操作步驟如下:
(1)開啟UART接口。首先打開樹莓派終端,輸入sudo raspi-config進入配置頁面,選擇Interface Options-serial,點擊關閉shell訪問,打開硬件串口,在終端中輸入sudo reboot,重啟樹莓派。
(2)安裝相關函數庫。打開樹莓派終端,依次安裝BCM2835、wiring pi、Python函數庫。
(3)打開minicom助手調試。打開樹莓派終端,輸入sudo apt-get install minicom 指令, 獲取 GPS 坐標,“y”代表緯度約為42.96,“x”代表經度約為90.09,與百度地圖標準經緯度比較后保存在gsp.json文件中,借助index.html即可在百度地圖中顯示當前位置。
3.3 監控系統軟件設計
監控系統的設計主要包括兩部分,即通過PC端的UI界面觀看監控與將PC端的聲音傳輸至樹莓派端。
首先在樹莓派端搭建基于Nginx模塊的直播服務器,通過FFmpeg采集視頻并使用H.264/AAC壓縮后通過RTMP協議推流到直播服務器,然后在PC端通過PyQt5模塊從直播服務拉流,借助OpenCV獲取圖片,并在IU界面顯示,完成監控。PC端的聲音傳輸過程按上述相反操作即可實現,監控系統設計流程如圖4所示。

圖4 監控系統設計流程
3.3.1 基于Nginx模塊的直播服務搭建
Nginx模塊是實現遠程監控的服務器平臺,直播原理:由樹莓派端通過攝像頭采集視頻數據,經過轉碼等操作,基于RTMP協議發送到Nginx服務端,服務端接收到數據后保存到本地,PC端基于RTMP協議訪問該服務端數據,經解碼等操作后方可顯示。
3.3.2 安裝FFmpeg并推流至服務器
FFmpeg的名稱來自MPEG視頻編碼標準,“FF”代表“Fast Forward”,FFmpeg是一套可以用來記錄、轉換數字音頻、視頻,并能將其轉化為流的開源計算機程序,可以輕易實現多種視頻格式的轉換。
具體操作步驟:輸入wget http://ffmpeg.org/releases/ffmpeg-3.0.9.tar.bz2,安裝FFmpeg,并通過DSHOW采集揚聲器數據以及攝像頭數據,使用H.264/AAC壓縮后推送到RTMP服務器。
3.3.3 使用Python拉流獲得監控圖像
使用Python從Nginx直播服務器中拉流,但此時導出的并非視頻,因此需要解析視頻流格式,然后將視頻流格式轉變為圖片格式顯示。一幀即一張圖片,可通過OpenCV庫獲取,并快速顯示在界面上。此時,就可以在監控界面看到攝像頭拍攝的圖像。
3.4 UI界面設計
UI界面設計:在Python中利用PyQt5庫中的函數進行設計,其中包括頁面設計、按鍵設計、開關設計等。UI界面設計流程如圖5所示。

圖5 UI界面設計流程
通過setWindowTitle(實時定位監控系統)語句編寫UI界面的標題,通過QPushButton語句進行菜單布局。self.openGpsBtn = QPushButton(關閉定位)、self.openCamBtn =QPushButton(關閉監控)、self.openMicBtn = QPushButton(關閉麥克風)語句分別是關閉定位、關閉監控、關閉麥克風。通過self.gpsView.setFixedSize、self.camView.setFixedSize語句確定定位和監控屏幕尺寸。
UI操作界面設計如圖6所示。
圖6 UI操作界面設計
4 系統搭建與測試
4.1 安全帽實物搭建
將LED燈、定位天線、擴展板、鋰電池、攝像頭、耳機集成安裝在安全帽上,粘貼布線簡潔、美觀、牢固。將定位天線的接收端放在安全帽外部頂端,將樹莓派固定在安全帽內部頂端一側,將鋰電池固定在安全帽頂端的另一側。鋰電池通過USB線與樹莓派相連,為樹莓派供電。樹莓派通過CSI接口與攝像頭相連。攝像頭處于安全帽前端的小孔處,用雙面膠固定。耳機通過樹莓派上的A/V插孔相連,從側面小孔接出,搭建效果如圖7所示。

圖7 搭建效果
4.2 定位功能測試
定位功能可以實時檢測安全帽的位置,經過對比,將安全帽放到屋外,可實時在地圖中顯示當前位置,當將安全帽放在屋內,至少需要2 min才能完成定位并在地圖中顯示,說明屋內、屋外環境對于定位功能的影響較大。
定位地圖如圖8所示。

圖8 實時定位地圖
4.3 監控功能測試
經過測試,畫面的延遲約為2 s。點擊“關閉監控”后,晃動安全帽時監控圖像無變化。當點擊“打開麥克風”后,程序可以調用電腦上的麥克風,這時對著電腦講話,可以通過耳機聽到。
攝像頭監控畫面如圖9所示。

圖9 攝像頭監控畫面
4.4 照明功能測試
通過安全帽一側開關控制LED燈的開關,如圖10所示。

圖10 LED燈的測試
5 結 語
本文從風電場安全監管技術維護的角度出發,提出并設計了一種基于樹莓派的嵌入式智能安全帽。此系統能實現定位、監控、通信、照明等功能,通過對安全帽進行測試,證明其效果較好。智能安全帽將是新能源發電行業面向信息化、智能化、物聯網化發展的必要設備之一,能對風電場風機巡檢、設備檢修、外包人員作業進行實時有效的安全監察,后期還需在減輕負載、增設功能、提高供電效率等方面不斷優化。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
