多重分辨率傾斜影像三維集群建模技術
2022-02-22 08:29:48李麗娟朱超乾顧景強
北京測繪 2022年1期
關鍵詞:模型
李麗娟 朱超乾 顧景強
(中國電建集團北京勘測設計研究院有限公司, 北京 100024)
0 引言
傾斜攝影技術是國際測繪領域近些年發展起來的一項高新技術,其突破了傳統航空攝影測量只能進行垂直角度影像獲取的局限性,通過在同一飛行平臺上搭載多臺傳感器,同時從“一個垂直、四個傾斜、五個不同”的角度采集影像,獲取到豐富的建筑物頂面及側視的高分辨率紋理。它不僅能夠真實地反映地物情況,高精度地獲取物方紋理信息,還可通過先進的定位、融合、建模等技術,生成真實的實景模型[1]。隨著現代化建設的需求、黨中央政策的支持、大數據云平臺及計算機集群技術的發展,如何高效地建立傾斜三維模型成了新的研究熱點[2]。魏曉琴[3]、張福存等[4]研究了傾斜攝影在大比例尺地形圖測繪中的應用及技術要點。周曉敏等[5]研究了傾斜攝影在城市級實景三維模型建設中的應用。王旭科等[6]研究了利用機載載激光雷達和傾斜影像進行互補融合構建城市三維模型的方法。張奇等[7]對比了三維重建幾種方式的優缺點,介紹了傾斜攝影測量和三維重建過程中的關鍵技術及未來的發展趨勢。何雁如等[8]論述了如何利用ContextCapture Center軟件提供的集群建模技術解決三維自動化建模時遇到的計算資源匱乏問題。從現有的傾斜建模技術和建模軟件應用分析,仙居抽水蓄能電站項目面積大、植被茂密且存在大范圍水庫,因此,建模中容易出現空中三角測量結果扭曲、分層等現象,生產的模型水域部分會出現大范圍空洞,同時單機建模效率低,不能滿足工期要求。針對以上問題,項目在航飛設計階段對整個建模區域先進行較低分辨率傾斜攝影,再對重點區域進行高分辨率傾斜攝影;在建模環節中,充分將瞰景Smart3D高效的空三處理優勢和ContextCapture Center的集群建模效率高的優勢相結合,再利用ModelFun軟件對傾斜模型進行道路置平、水面修補、底部碎片及懸浮物刪除等修飾工作。該方法不僅提高了生產作業效率,而且取得了良好的建模效果。
1 項目概況及技術路線
浙江仙居抽水蓄能電站是國家“十一五”規劃重點建設工程和浙江省重點工程。電站位于浙江省仙居縣湫山鄉境內,測區植被茂密,山勢陡峭,地形分類屬于高山地。需要完成傾斜模型建設總面積10.45 km2,總體分辨率不低于5 cm,業主營地、上下水庫及環庫路等重要區域分辨率不低于2 cm。基于瞰景Smart3D和ContextCapture Center的傾斜建模技術路線如圖1所示,主要包括前期準備、數據采集、空三加密、傾斜模型生產、傾斜模型修飾、質量檢查6個階段。
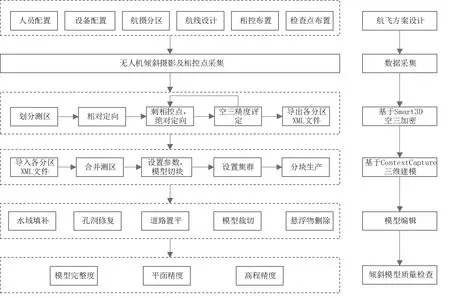
圖1 傾斜模型建模技術路線
2 航飛方案設計
前期準備階段主要包括航飛方案設計和航飛人員、設備配置。航飛設置包括航攝分區、航線設計和像控點布設。結合仙居抽水蓄能電站項目要求和項目區域環境特點,本次航飛采用大疆M600Pro型無人機進行航飛,搭載KG1000五鏡頭相機進行拍攝,采用上海珞琪軟件公司開發的RockyCapture航線規劃軟件進行地面站的操作。測區為山區,高差較大,為了同時滿足最高點重疊度和最低點分辨率的要求,航飛采用地形跟隨方式飛行,航飛高度隨著地形起伏而變化,設計4.8 cm分辨率,分1~12測區進行航攝,再對重要區域設計1.5 cm分辨率,分13~21測區進行二次拍攝。
為了滿足三維模型量測及分析需求,必須將傾斜模型從GPS定位得到的WGS84地理坐標系,轉化到與浙江仙居項目一致的投影過后的獨立坐標系。須在三維模型區域內布置高精度像片控制點。像控點的布設按照飛行分區采用區域網布點法,隔航線布設,結合項目重點區域精度要求,共計布設42個像控點和72個用于傾斜模型質量檢查的檢查點。
3 數據采集
數據采集主要包括傾斜影像采集和像控點采集。傾斜攝影按照航拍設計在天氣晴朗、能見度高的環境下進行,共計拍攝4.8 cm分辨率影像22 290張,1.5 cm分辨率影像23 025張,共計拍攝航片45 315張;飛行姿態穩定,獲取影像清晰、層次豐富,總體質量較好。對獲取的航拍像片及POS數據,依次進行有效像片數確定、POS數據編輯、各鏡頭影像名更改,確保POS信息與5鏡頭像片數量及信息一一對應,便于后期三維傾斜模型生產。
鑒于此次航飛影像清晰度較高,像控點測量采用直接在航片上選刺的方式進行。選擇交角良好的細小線狀地物交點、地物折角頂點、影像小于0.2 mm的點狀地物中心,且高程變化較小、易于準確定位與量測的明顯地物直接影像判刺。采用實時動態載波相位差分(Real Time Kinematic,RTK)技術獲取像控點坐標,并按照《低空數字航空攝影測量外業規范》要求做好“點之記”,以方便后續建模內業空三處理中應用。
4 基于Smart3D空中三角測量計算
空中三角測量(簡稱“空三”)是指解算相機參數、影像位置、姿態以及加密點三維坐標的過程,是傾斜三維建模的關鍵步驟。整體流程主要包括影像特征點提取與匹配、構建自由網以及加刺控制點絕對定向。目前國內常用的建模軟件為是Acute3D公司的Context Capture(簡稱“CC”)。由于浙江仙居項目的傾斜影像具有多重分辨率、大面積水域的特殊性,常用軟件對此類數據解算效果差,易出現空三錯亂、分層及大量照片未參與解算。而Smart3D具有測區劃分靈活、刺點模式友好、二次平差速度極快、空三解算一次性通過率高等優點。因此,浙江仙居項目采用瞰景科技的Smart 3D平臺進行空三解算再導出XML文件到CC中進行建模。其建模主要流程如下:
(1)新建工程及數據導入:在Smart3D中新建工程,導入全部的影像數據及像控點坐標文件,檢查定位定姿系統(Position and Orientation System, POS)數據及影像的完整性及正確性。
(2)分區相對定向:依據相鄰測區不少于4個公共控制點、單個測區影像數量小于1.5萬張的原則,將編號為1~21的航測區域分為block1(4、8、11、21)、block2(,6、10、12、13、14)、block3(1、3、7、9、19、20)及block4(2、5、15、16、17、18)四個測區,Smart3D將利用POS數據分別進行特征點提取、匹配、平差完成相對定向。
(3)分區絕對定向:依據控制點“點之記”文件同時進行5鏡頭相片的刺點工作,經反復“平差-調整點位-平差”直至解算出精度要求滿足規范《數字航空攝影測量中三角測量規范》(GB/T 23236—2009),求出影像的外方位元素,完成絕對定向。
(4)導出各分區的XML成果。
5 集群模式下Context Capture三維建模技術
將Smart3D導出的XML成果導入CC軟件中并依次合并,檢查各分區接邊處是否出現分層或錯層等問題。設置建模參數,依據計算機內存大小設置切塊大小。ContextCapture軟件包含控制臺(Master)、設置(Setting)、引擎(Engine)、瀏覽器(Viewer)幾個模塊。CC4.4以上版本在基于邏輯并行計算的集群下,由主機的master創建任務并分配建立“先到先行”的工作隊列,進行任務分配;Setting是一個中間介質,它主要是幫助Engine指向任務的路徑;副機的Engine接收分配的子任務并完成并行計算。其工作模式如圖2所示。為該項目配置1臺主機9臺副機組成建模集群,CC軟件在高密度點云基礎上全自動構建地物不規則三角網 (Triangulated Irregular Network,TIN)模型,再根據TIN模型形狀及位置從影像里選擇最合適的紋理進行貼合,分別輸出“.3mx”及“.obj”格式的傾斜三維模型。在Viewer中查看其模型效果,如圖3所示。
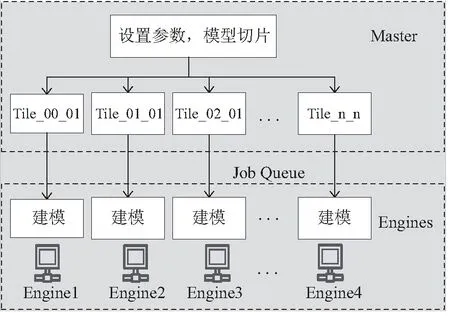
圖2 CC集群在傾斜三維建模中的工作模式
6 傾斜模型修飾
傾斜攝影過程中可能存在遮擋、反光、運動、影像落水等情況,在三角網構建過程中引起模型空洞、扭曲、碎片等問題,影響模型的可視化效果,因而,需要將存在缺陷的模型分塊借助三維模型編輯軟件進行修飾[9]。本文選擇ModelFun軟件作為模型修飾工具,對已生成的傾斜模型進一步完善。
(1)水域填補:由于測區的蓄能電站上水庫面積較大,落水照片近千張,水面特征點少,軟件在計算時很難匹配正確,導致輸出模型的水面大范圍缺失,使計算出的部分水面也存在水面高程異常,空洞、凹陷等情況如圖4所示。水面修飾需要對異常的水面進行圈定并刪除,隨后通過ModelFun的“水面修整”工具提示完成水面修飾,修飾后效果如圖5所示。
(2)孔洞修復:由于航拍視角被遮擋,復雜的建筑物、擁有玻璃墻面的建筑物會出現漏洞,如圖6矩形框中的模型,利用ModelFun的“立面修整”及“補洞”工具完成結構的修飾,再利用“空三映射”選擇影像完成紋理修飾,效果如圖7所示。

圖6 未修飾前的傾斜模型

圖7 ModelFun修飾后的傾斜模型
(3)道路置平:由于路面車輛、行人較多,都是運動狀態,導致影像匹配時出現異常,如圖6棱形中的模型,利用ModelFun的“道路置平”工具優化道路、橋梁使其盡量平整,再將不符合的紋理部分聯動Photoshop軟件進行修飾,其效果如圖7所示。
(4)懸浮物刪除:獨立樹、點線桿、電線塔、路燈等目前不能通過實景三維建模的形式重建,造成三維模型中存在懸浮物,如圖6橢圓形中的模型,利用ModelFun的“刪除小物件”工具一鍵刪除細小的碎片及懸浮物,其效果如圖7所示。
(5)測區邊緣裁切,利用ModelFun的“測區邊緣裁切”工具依據浙江仙居項目建模范圍進行傾斜模型邊緣裁切。
7 傾斜三維模型質量檢查
傾斜三維模型質量檢查是整個項目重要的一環,建模流程的每個環節都必須進行嚴格的質量控制,最終反映到模型整體美觀性、平面精度和高程精度3個指標上[10]。
浙江仙居項目傾斜模型底部無碎片,上部無懸浮物,數據邊緣整齊,紋理整體上無明顯色差,道路紋理物明顯錯位,模型細節層次豐富,結構完整,建模效果良好。滿足項目驗收要求。
傾斜模型平面精度和高程精度通過量測模型上檢查點的三維坐標與外業實測值進行對比,按照均勻分布、重要區域加密采集的原則,共計采集4.8 cm+1.5 cm分辨率范圍內檢查點30個,4.8 cm分辨率范圍內檢查點43個,點位包括房角、臺階、路面標示線折角等多類要素,4.8 cm+1.5 cm及4.8 cm分辨率檢查點實測坐標和其對應的模型量測坐標精度統計表分別見表1和表2。
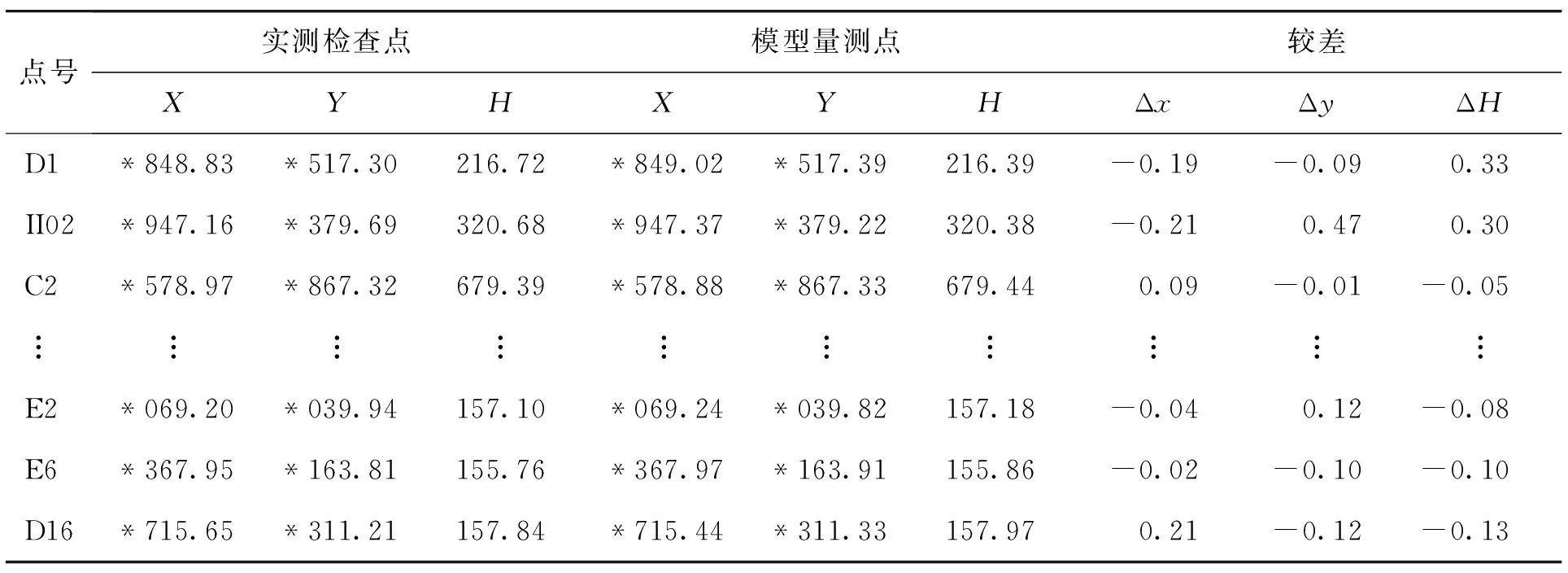
表1 4.8 cm+1.5 cm分辨率范圍傾斜模型精度統計表 單位:m
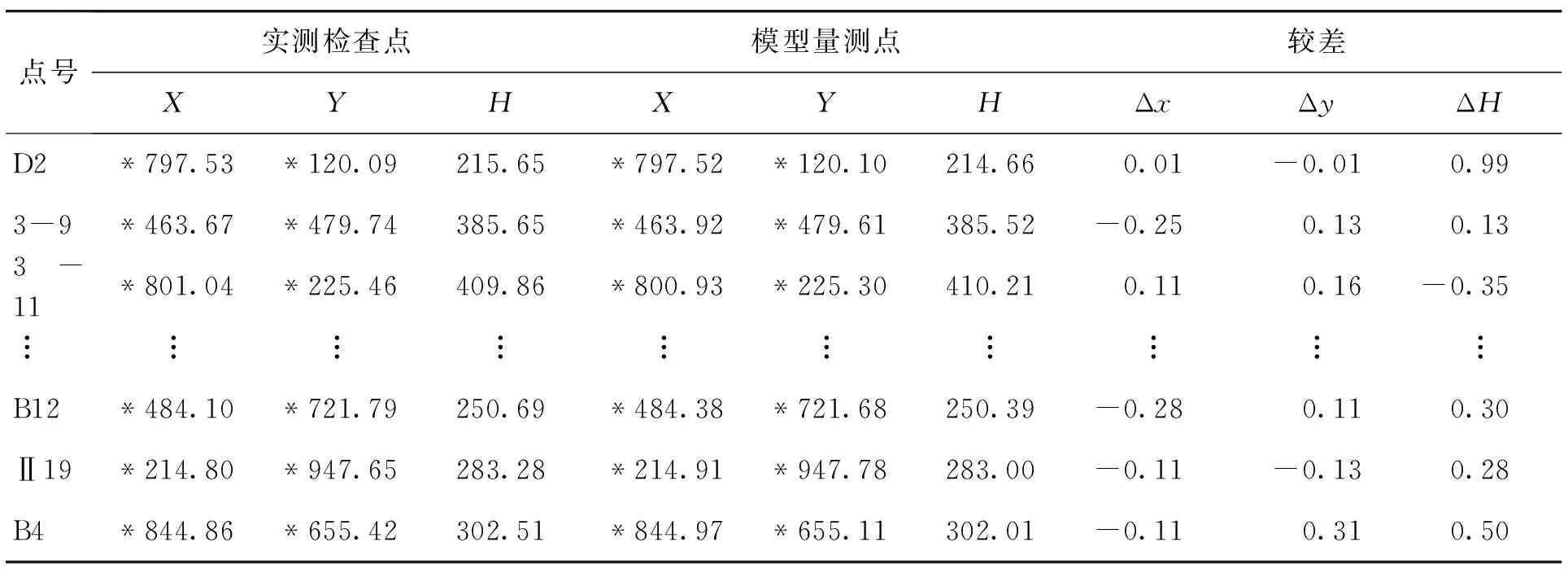
表2 4.8 cm分辨率范圍傾斜模型精度統計表 單位:m
分析表2可知,4.8 cm分辨率區域43個點位,平面X、Y方向最大的點位誤差分別為0.75、0.64 m,最小的點位誤差均為0.01 m,平面中誤差計算為0.35 m,高程誤差最大值1.26 m,最小值0.1 m,計算高程中誤差值為0.42 m。該測區傾斜三維模型精度符合《三維地理信息模型產品規范》(CH/T9015—2012)相關要求。
8 結束語
(1)本文將Smart 3D平臺空三解算出XML文件導入CC中建模,利用了Smart3D測區劃分靈活、刺點模式友好、二次平差速度極快、空三解算一次性通過率高及ContextCapture生產的傾斜模型細節層次豐富、結構完整、模型效果良好的優點。
(2)本文利用多臺普通PC機實現了基于邏輯并行計算的傾斜三維集群建模技術,提高了生產效率,保證了項目的按時驗收。
(3)本文利用ModelFun軟件對自動建模中由于遮擋、反光、運動造成模型的空洞、扭曲、碎片等情況進行修飾,在自動建模的基礎上優化模型效果。
(4)通過外業實測檢查點三維坐標與傾斜模型上量測值進行比較,其平面精度與高程精度均滿足《三維地理信息模型產品規范》(CH/T9015—2012)要求,項目成果可以作為基礎數據應用于浙江仙居抽水蓄能電站項目規劃與設計。
(5)實景三維中國建設是新型基礎測繪的主要任務和成果形式,帶動“以地理要素為視角和對象”的傳統基礎測繪向“以地理實體為視角和對象”的新型基礎測繪轉變。本文總結的技術路線和生產流程為大面積、多廣水域、多重分辨率的同類型傾斜建模項目提供借鑒參考和實踐經驗。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19