渦槳動力裝置控制構型淺析
2022-02-28 10:39:50化東勝楊振杰劉振
內燃機與配件 2022年5期
化東勝 楊振杰 劉振







摘要: 渦槳飛機動力裝置控制系統通常包括發動機控制系統、螺旋槳控制系統及機上相關設備。傳統控制構型采用功率桿控制發動機功率,狀態桿控制螺旋槳轉速/槳距。近年來出現了功率桿集成控制發動機功率和螺旋槳轉速/槳距的設計構型。單桿控制構型具有操縱簡單,重量輕,設備安裝空間小等優點。本文提供了典型雙發渦槳飛機動力裝置控制系構型及其特點分析,旨在為渦槳動力裝置控制系統的設計提供參考。
Abstract: Turboprop aircraft powerplant control system generally consists of engine control system, propeller control system and the related airborne equipment. The power lever shall control engine power and the condition lever shall control propeller speed/pitch in traditional control configuration. New design configuration appears in recent years which a single lever controls both engine power and propeller speed/pitch. The single lever configuration is more easily handled, with less weight and smaller installation space. This article provides typical powerplant control system configurations in dual engine Turboprop aircraft with the analysis of the different configurations′ characteristics, and intents to provide turboprop powerplant control system references.
關鍵詞: 渦槳動力裝置;發動機功率控制;螺旋槳轉速/槳距控制;功率桿;狀態桿
Key words: turboprop powerplant;engine power control;propeller speed/pitch control;power lever angle;condition lever angle
中圖分類號:V232 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章編號:1674-957X(2022)05-0037-03
0 ?引言
渦槳發動機在飛機飛行速度低于小于800km/h時,其推進效率要高于渦噴渦扇發動機,因此在速度要求相對較低的運輸機領域仍然有著廣泛的應用。當前服役的渦槳飛機有軍用的A400M、C-130等,民用支線客機MA60/600、Q400和ATR系列飛機等。
從上世紀70年代波音飛機采用電傳飛行控制開始,電傳控制系統在航空領域的應用得到了長足的發展,發動機和螺旋槳的機械式控制方式逐漸被電傳控制方式所取代,電傳控制的普及為渦槳動力裝置控制系統的“單桿控制”設計構型提供了技術基礎。本文研究的渦槳動力裝置控制系統的構型都是基于電傳控制方式。
常規的渦槳飛機動力裝置控制系統采用“雙桿控制”構型,功率桿控制發動機功率,狀態桿控制螺旋槳轉速和槳距,即“雙桿控制”構型,如Q400飛機。隨著電子軟硬件集成技術的不斷成熟,近些年出現了功率桿集成控制發動機功率和螺旋槳轉速/槳距的設計構型,即“單桿控制”構型,如A400M飛機、國內在研的新舟700飛機等。本文提供了渦槳飛機動力裝置控制系統的雙桿控制和單桿控制的典型設計案例,并對兩種控制構型的特點進行了淺析。
1 ?雙桿控制設計構型
渦槳動力裝置雙桿控制構型的油門臺上設置有功率桿和狀態桿,圖1為典型的雙發渦槳飛機的油門臺布局示意圖:左側為功率控制桿,設置有左、右發動機功率桿,分別用于向左、右發動機控制器(如Full Authority Digital Engine Control,FADEC等)提供功率桿角度(PLA)信號,控制發動機的功率;右側為狀態控制桿,設置有左、右螺旋槳狀態桿,分別用于向左、右螺旋槳控制器(如Propeller Electric Controller,PEC等)提供狀態桿桿角度(CLA)信號,控制螺旋槳的轉速和槳距。
功率桿的各位置標識為:MAX. REV-最大反槳,GI-地面慢車,FI-飛行慢車,RATING/額定位,EMER-應急功率。狀態桿的各位置標識為:FUEL OFF-燃油切斷,START/FTHR-起動順槳,850-螺旋槳850RPM轉速,900-螺旋槳900RPM轉速,1020-螺旋槳1020RPM轉速。
動力裝置雙桿控制構型的工作原理如圖2所示,機組操縱功率桿,功率桿的RVDT向發動機FADEC提供PLA信號,FADEC根據PLA和飛機狀態信息(通常包括飛機空速、高度、發動機引氣等)控制發動機的輸出功率。機組操縱狀態桿,狀態桿的RVDT向螺旋槳電子控制器(PEC)提供CLA信號,PEC根據CLA信號和飛機狀態信息控制螺旋槳的轉速和槳距。
以圖1的布局為例,雙桿控制構型需要組合操縱功率桿和狀態桿來改變對發動機功率和螺旋槳轉速/槳距的控制,以滿足飛機在不同狀態下的拉力需求,具體操縱建議如表1所示。
除表1提及的典型使用場景外,機組根據飛機飛行的速度/高度要求,在FI~RATING之間操縱功率桿(狀態桿通常保持在850)。
2 ?單桿控制設計構型
渦槳動力裝置系統單桿控制構型取消了狀態桿,功率桿集成控制發動機功率和螺旋槳轉速/槳距。圖3為典型的雙發渦槳飛機單桿控制構型的油門臺布局,油門臺設置有左、右功率桿,功率桿的RVDT分別向左、右發動機FADEC提供PLA信號。
功率桿的各位置標識為:MAX. REV-最大反槳,GI-地面慢車,FI-飛行慢車,MCL/爬升功率,NTO/正常起飛功率,MTO/最大起飛功率。
動力裝置單桿控制構型的工作原理如圖4所示,機組操縱功率桿向FADEC提供PLA信號,FADEC根據PLA和飛機狀態信息控制發動機的輸出功率,并向PEC提供螺旋槳的轉速和槳距控制指令(類似模擬的CLA信號)。PEC根據FADEC的指令控制螺旋槳速度/槳距。單桿控制構型需要設置發動機正常停車和螺旋槳正常順槳開關支持實現發動機的正常停車功能和螺旋槳的正常順槳功能。
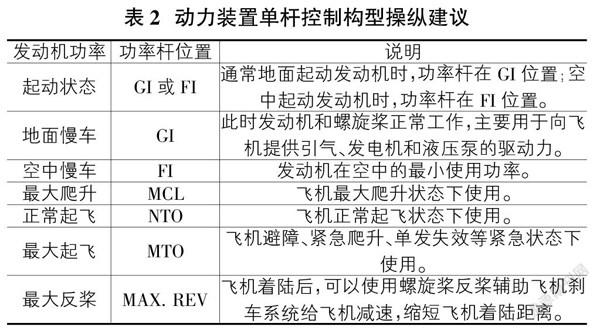
以圖3的布局為例,單桿控制構型操縱功率桿來改變發動機功率和螺旋槳轉速/槳距,以滿足飛機在不同狀態下的拉力需求,具體操縱建議如表2所示。
除表2提及的典型使用場景外,巡航狀態下,機組根據飛機飛行的速度/高度要求,在FI~MCL之間操縱功率桿。
3 ?控制構型淺析
根據上文對典型雙發渦槳飛機動力裝置控制系統設計構型的介紹,本章節對兩種控制構型的特點進行了對比分析。
3.1 機組操縱
為了滿足飛機不同飛行狀態下的拉力需求,上文表1和表2分別列出了渦槳動力裝置不同控制構型的操縱方式:雙桿控制構型需要組合操縱功率桿和狀態桿,功率桿和狀態桿的組合使用場景較多;單桿控制構型只需要操縱功率桿,外界環境確定的情況下,發動機功率和螺旋槳轉速僅受功率桿控制。
對比兩種控制構型的操縱方式可知,單桿控制構型對機組的操縱要求更低,利于減輕機組的工作負荷。此外,現代飛機多配置有自動油門控制系統,單桿控制構型的控制方式更簡單,利于支持飛機實現自動油門控制功能。
3.2 重量
雙桿控制構型有功率控制桿和狀態控制桿,功率桿和發動機FADEC連接,狀態桿與螺旋槳PEC連接,布置在駕駛艙的油門臺到發動機短艙(通常布置在機翼下方)之間的線纜較長;單桿控制構型功率桿和發動機FADEC連接,FADEC和PEC之間通訊可以借用已有的總線通道,通常無需額外的線纜連接。
以國產某型雙發渦槳新舟飛機的動力裝置控制系統的權衡研究為例,雙桿控制構型的功率桿與FADEC交聯、狀態桿與PEC交聯,控制系統采用雙裕度設計,單側油門臺與FADEC和PEC的交聯關系如圖5所示;單桿控制構型的功率桿與FADEC交聯、FADEC與PEC使用RS422總線進行通訊,控制系統采用雙裕度設計,單側油門臺與FADEC的交聯關系如圖6所示。
線纜以M27500-22SM1N23單芯屏蔽線為計算基準(取12.5kg/km),油門臺與短艙之間的距離按照23.6m計算;從評估數據可以看出,該新舟飛機動力裝置采用單桿控制構型的重量比雙桿控制構型輕6.44kg,重量優勢非常明顯。
3.3 適航影響
中國民航對發動機和螺旋槳的操縱器件的條款規定為CCAR25.1149條,具體內容如下:
第25.1149條螺旋槳轉速和槳距的操縱器件
(a)每一螺旋槳必須有單獨的螺旋槳轉速和槳距的操縱器件。
(b)操縱器件必須成組排列并滿足下列要求:
(1)能單獨操縱每一螺旋槳;
(2)能同時操縱所有的螺旋槳。
(c)操縱器件必須能使所有螺旋槳同步。
(d)螺旋槳轉速和槳距的操縱器件必須設在駕駛員油門操縱器件的右面,至少比其低25毫米(1英寸)。
根據前文的介紹,本文介紹的渦槳動力裝置的雙桿控制構型和單桿控制構型均能滿足CCAR25.1149(a)、(b)(c)條款的要求。雙桿控制構型能夠滿足CCAR25.1149(d)條款的要求,單桿控制構型因沒有設置狀態桿,從文字上不能夠滿足CCAR25.1149(d)條款要求。
為了表明單桿控制構型對CCAR25.1149(d)條款的適航符合性,需編制適航等效安全或申請CCAR25.1149(d)的豁免來實現對CCAR25.1149條款的適航認證。
4 ?結束語
渦槳飛機動力裝置的單桿控制構型相較于雙桿控制構型,具有操縱更簡單、重量更輕、駕駛艙布置空間更小、更利于支持飛機自動油門控制功能等優點。單桿控制構型對控制系統的軟硬件集成研制、系統的適航等工作的要求更高。綜合評估,渦槳動力裝置系統單桿控制構型更具優勢,將是未來渦槳動力裝置控制系統設計的首選構型。
參考文獻:
[1]廉筱純,吳虎.航空發動機原理[M].西安:西北工業大學出版社,2005.
[2]時瑞軍,周劍波,黃波,皮星.渦槳發動機控制技術演變及趨勢[J].航空動力,2019(4).
[3]陳懷榮,王曦.國外渦槳發動機控制技術的發展[J].航空發動機,2016年12月.