C0-C0米軌內燃機車橫向動力學性能分析
2022-02-28 10:39:50崔瀟
內燃機與配件 2022年5期
崔瀟
摘要: 針對C0-C0米軌內燃機車建立動力學模型,分析了多種直線和曲線工況下機車平穩性和運行品質。結果表明:隨著運行速度的增加,機車橫向平穩性和加速度最大值呈上升趨勢,指標在不同測量位置由大到小依次為前司機室、后司機室、車體中心;對于曲線工況,機車橫向平穩性最大值逐漸增加,司機室大于車體中心,而橫向加速度最大值在曲線半徑為130m、800m、1200m時分別呈現線性增長、雙線性增長和先降低后增長的趨勢。
Abstract: The dynamic model of C0-C0 meter gauge diesel locomotive was established, and the locomotive ride index and running quality were analyzed in straight and curve line. The results show that the maximum value of lateral ride index and acceleration of locomotive maintain an upward trend with the increase of running speed and the index values in different measurement positions are in the order of front cab, rear cab and carbody center. For curve negotiating case, the maximum value of locomotive lateral ride index increases gradually and index is larger at the cab than at carbody center. The maximum value of lateral acceleration increases linearly, bilinear and decreases first and then increases when the curve radius is 130m, 800m and 1200m, respectively.
關鍵詞: 機車;曲線通過;平穩性;運行品質
Key words: locomotive;curve negotiating;ride index;running quality
中圖分類號:U262.11 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章編號:1674-957X(2022)05-0040-03
0 ?引言
機車的平穩性及運行品質指標反映了機車運行過程中機車乘務員的乘坐體驗,因此,研究不同工況下機車的平穩性及運行品質有助于針對不同工況設置合理運行速度,從而提升機車乘務員運行中舒適程度及行車安全
性[1-5]。根據GB/T 5599-2019要求,評價機車運行平穩性采用Sperling平穩性指標,評價機車運行品質采用車體振動加速度[6]。本文主要對直線和曲線工況下,機車橫向平穩行和橫向加速度進行計算和分析。
1 ?機車動力學模型建立
1.1 結構說明
機車設計軸重20t,采用了C0-C0轉向架,每個轉向架布置了三組驅動裝置,轉向架驅動裝置沿同一方向布置。驅動裝置采用軸懸方式,驅動裝置直接與輪對鉸接,并使用電機吊桿與構架彈性連接。一系懸掛采用雙拉桿雙鋼彈簧方式,端軸箱均配有一系垂向減振器。二系懸掛采用橡膠堆,提供垂向和橫向剛度,每轉向架一側分別布置有2個橡膠堆,每轉向架配有2個垂向減振器、2個橫向減振器、2個抗蛇行減振器。采用目字形焊接箱形梁構架,構架端梁上有驅動裝置的一個彈性連接點,構架兩根中間橫梁上各有驅動裝置的1個彈性鉸點。根據動力車轉向架基本結構以及動力學參數,建立了動力車的動力學模型。模型的體選取了車體、構架、輪對、驅動裝置、軸箱、電機吊桿、牽引四連桿。端軸、中間軸軸箱軸承分別設置了3mm、11mm自由間隙。
1.2 輪軌幾何關系
機車輪徑1067mm,車輪廓形為錐形踏面,鋼軌型面為80A[7],軌距1000mm,軌底坡為1/40,等效錐度為0.054。
1.3 工況設置
針對機車實際運行工況,直線工況設置10個速度級,運行速度為50-140kh/h,速度間隔10km/h。選取曲線半徑分別為R130、R800、R1200三種實際運行中的曲線工況。
在軌道不平順方面,直線工況采用美國4級軌道譜,空間波長設置為1-120m。曲線工況采用美國5級軌道譜,空間波長設置為1-100m。
2 ?直線工況橫向平穩性和加速度
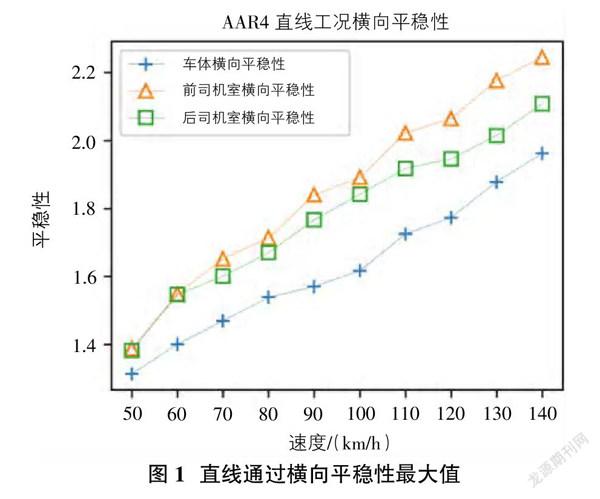
不同速度下,直線通過橫向平穩性最大值、橫向加速度最大值如圖1、圖2所示。同時,按照標準要求,在計算平穩性和運行品質指標過程中,加速度值均進行0.4-40Hz 帶通濾波。
直線通過橫向平穩性最大值指標隨著運行速度的增加逐漸增加。在50-140km/h區間,指標基本處于線性增加狀態。對于同一速度級,指標按照前司機室、后司機室、車體中心逐漸降低。速度為140km/h時前司機室指標達到2.24,后司機室指標達到2.11,車體中心指標達到1.96。
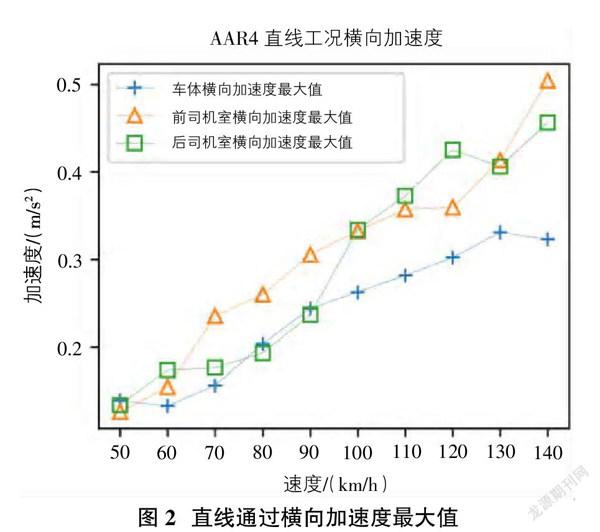
直線通過橫向加速度最大值指標隨著運行速度的增加基本呈現線性增加趨勢。在50-140km/h區間,前司機室和車體中心指標基本處于線性增加狀態,后司機室指標則處于波動狀態,在80-90km/h時指標低于車體中心指標,在100-120km/h時指標高于前司機室指標。速度為140km/h時前司機室指標達到0.50m/s2,后司機室指標達到0.46m/s2,車體中心指標達到0.32m/s2。
從以上計算可知,對于直線工況,隨著運行速度的增加,機車橫向平穩性最大值指標逐漸增加,指標由大到小順序為前司機室、后司機室、車體中心。在所有速度級中,指標最大值為140km/h時前司機室橫向平穩性,達到2.24。
隨著運行速度的增加,機車橫向加速度最大值指標整體呈現線性上升總體趨勢,指標總體趨勢由大到小順序為前司機室、后司機室、車體中心,但后司機室指標存在局部波動,部分速度級高于前司機室或者低于車體中心的指標。在所有速度級中,指標最大值為140km/h時前司機室橫向加速度,達到0.50m/s2。
3 ?曲線工況橫向平穩性
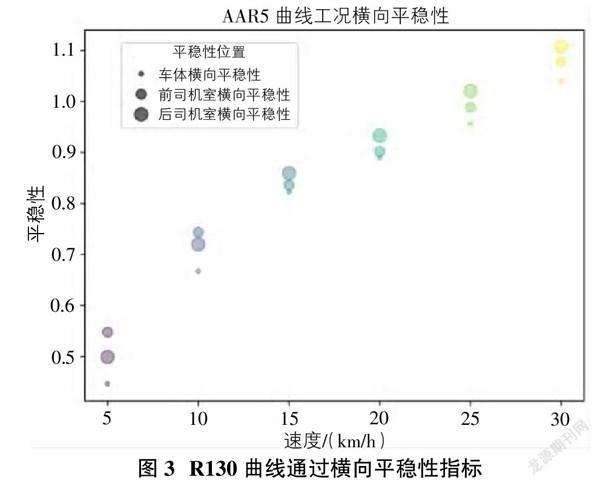
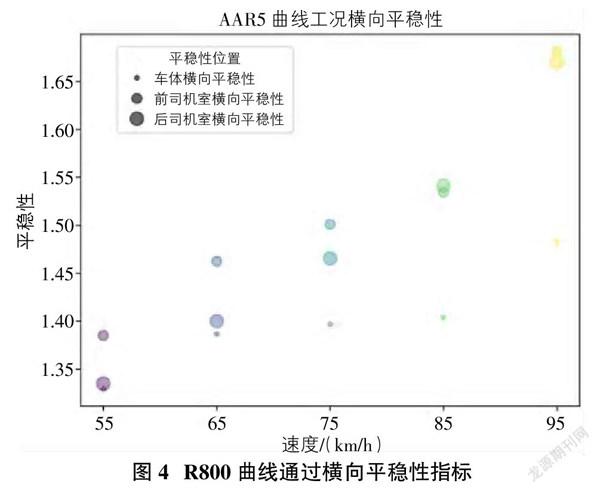
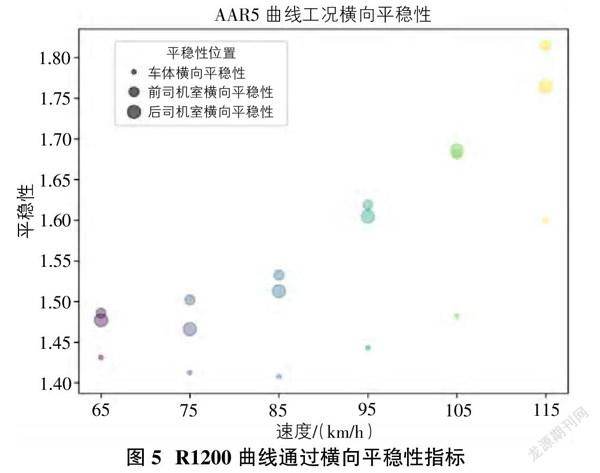
不同速度下,R130、R800、R1200曲線通過工況,橫向平穩性最大值如圖3-圖5所示。
對于R130曲線通過工況,隨著運行速度的增加,機車橫向平穩性最大值指標逐漸增加,5km/h到15km/h區段指標增長最快,隨后指標增長速度逐漸放緩。在30km/h速度下,前司機室指標達到1.11,后司機室指標達到1.08,車體中心指標達到1.04。
對于R800曲線通過工況,隨著運行速度的增加,機車橫向平穩性最大值指標逐漸增加,55km/h到25km/h區段指標增長平穩,25km/h到30km/h區段指標增長速度增大。在95km/h速度下,前司機室指標達到1.68,后司機室指標達到1.67,車體中心橫向指標達到1.48。
對于R1200曲線通過工況,隨著運行速度的增加,機車橫向平穩性指標逐漸增加,在65km/h到115km/h整個區段指標增長速度基本一致。在115km/h速度下,前司機室指標達到1.81,后司機室指標達到1.76,車體中心指標達到1.60。
從以上計算可知,對于曲線工況,隨著運行速度的增加,機車橫向平穩性最大值指標處于基本線性增加趨勢,前后司機室指標大于車體中心指標。在R130所有速度級中,指標最大值為30km/h時前司機室指標,達到1.11。在R800所有速度級中,指標最大值為105km/h時前司機室,指標達到1.68。在R1200所有速度級中,指標最大值為115km/h時前司機室指標,達到1.81。
4 ?曲線工況橫向加速度
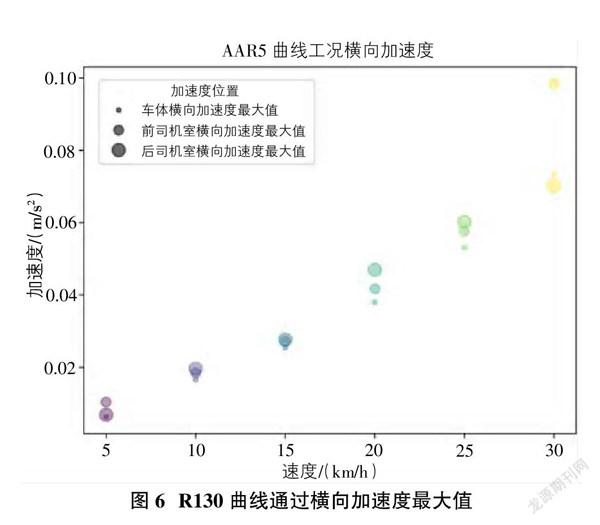
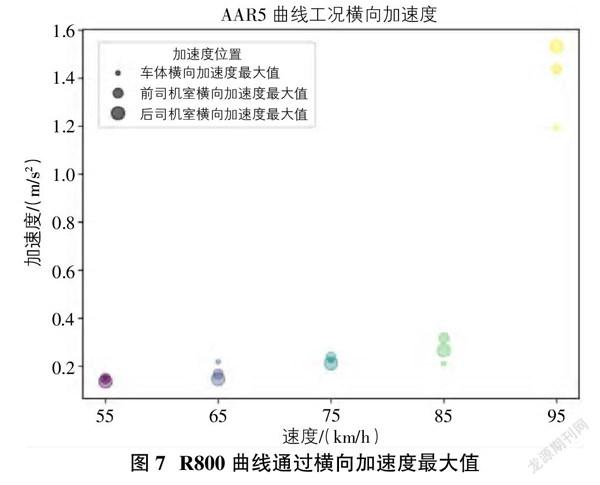
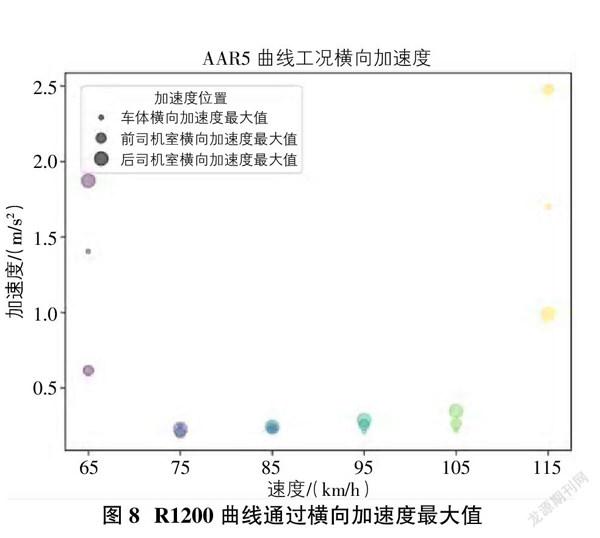
不同速度下,R130、R800、R1200曲線通過橫向加速度最大值如圖6-圖8所示。
對于R130曲線通過工況,隨著運行速度的增加,機車橫向加速度最大值指標呈現線性增加趨勢,在5km/h到30km/h區段指標增長速度基本一致,且由于速度較低,前后司機室橫向加速度和車體中心指標差別不大。在30km/h速度級下,前司機室指標達到0.10m/s2,后司機室指標達到0.07m/s2,車體中心指標也達到0.07m/s2。
對于R800曲線通過工況,隨著運行速度的增加,機車橫向加速度最大值指標出現雙線性的增長趨勢。在85km/h前指標先緩慢增線性長,85km/h到95km/h,指標迅速線性增長。95km/h時車體中心指標達到1.19m/s2,前司機室指標達到1.43m/s2,后司機室指標達到1.53m/s2。
對于R1200曲線通過工況,隨著運行速度的增加,機車橫向加速度最大值指標先降低后增加。在65km/h到75km/h區段指標降低,75km/h到105km/h區段指標緩慢增加,105km/h到115km/h區段指標顯著增加。115km/h時前司機室指標達到2.47m/s2,后司機室指標達到0.99m/s2,車體中心指標達到1.70m/s2。隨著速度的增加,前后司機室和車體中心指標的差距先減小后增大。
從以上計算可知,對于曲線工況,隨著運行速度的增加,機車橫向加速度最大值指標出現不同變化規律。對于R130所有速度級中,指標隨速度增加基本處于線性增長趨勢。指標最大值為30km/h時前司機室指標,達到0.10m/s2。對于R800所有速度級中,指標出現雙線性的增長趨勢。在85km/h前指標先緩慢增線性長,85km/h到95km/h,指標迅速線性增長,最大值為95km/h時后司機室指標,達到1.53m/s2。對于R1200所有速度級中,隨速度變化指標出現先降低后增長的變化趨勢。在65km/h到75km/h區段,指標降低。在75km/h到105km/h區段,指標緩慢線性增長。105km/h到115km/h,指標迅速線性增長,最大值為115km/h時前司機室指標,達到2.47m/s2。
5 ?結論
通過對機車直線和曲線工況的動力學計算,可以獲得如下結論:
①對于直線工況,隨著運行速度的增加,機車橫向平穩性最大值指標逐漸增加,指標由大到小順序為前司機室、后司機室、車體中心。而機車橫向加速度最大值整體呈現上升趨勢,指標總體趨勢由大到小順序同樣為前司機室、后司機室、車體中心,但后司機室指標存在局部波動,部分速度級高于前司機室或者低于車體中心的指標。
②對于曲線工況,隨著運行速度的增加,機車橫向平穩性最大值指標逐漸增加,前后司機室指標大于車體中心指標。
③對于曲線工況,隨著運行速度的增加,機車橫向加速度最大值指標出現不同變化規律。對于R130所有速度級中,指標隨速度增加基本處于線性增長趨勢。對于R800所有速度級中,指標出現雙線性的增長趨勢。對于R1200所有速度級中,隨速度變化指標出現先降低后增長的變化趨勢。
參考文獻:
[1]姚遠,任鋮銘,陳相旺,劉曉雪.基于頻域平穩性的高速機車懸掛參數優化匹配[J].西南交通大學學報,2021:1-8.
[2]鄧小星,陳國勝,沈龍江.機車蛇行狀態橫向平穩性仿真研究[J].鐵道機車車輛,2019,39(03):88-91.
[3]馮征,楊亮亮,羅世輝.某C0-C0機車二系橫向減振器對橫向平穩性的影響[J].機車電傳動,2016(02):15-17.
[4]杜建華,陳康.軸重及懸掛參數對大功率六軸交流傳動機車運行平穩性的影響[J].內燃機車,2010(10):1-5.
[5]劉建新,王開云.抗蛇行減振器對機車運行平穩性的影響[J].交通運輸工程學報,2006(04):1-4.
[6]國家標準化管理委員會.機車車輛動力學性能評定及試驗鑒定規范:GB/T 5599-2019[S].北京:中國標準出版社,2019.
[7]The British Standards Institution. Specification for dimensional properties and associated tolerances of railway rails. BS 11:2015[S]. BSI Standards Limited,2015.