正弦力法動態力傳感器靈敏度不確定度評定
2022-02-28 10:39:50郝春法
內燃機與配件 2022年5期
郝春法


摘要: 隨著汽車技術的日益發展,動態力傳感器在汽車NVH、模態試驗中用到的越來越多,一般采用動態法校準。本文依據振動與沖擊傳感器校準方法,以標準振動傳感器為標準器,采用正弦力法校準動態力傳感器靈敏度,并計算動態力傳感器靈敏度測量值的不確定度,確保量準的準確一致和正確傳遞。
Abstract: With the development of automotive technology, dynamic force sensors are used more and more in vehicle NVH and modal tests, and dynamic calibration is generally adopted. Based on the calibration method of vibration and impact sensor, the sensitivity of dynamic force sensor is calibrated by sinusoidal force method with standard vibration sensor as standard, and the uncertainty of the measured value of dynamic force sensor sensitivity is calculated to ensure the accuracy, consistency and correct transmission of the measurement accuracy.
關鍵詞: 動態力傳感器;正弦力法;靈敏度;不確定度
Key words: dynamic force sensor;sinusoidal force method;sensitivity;uncertainty
中圖分類號:TP206 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章編號:1674-957X(2022)05-0052-03
0 ?引言
隨著汽車技術的發展,在汽車NVH、模態試驗中普遍會用到力錘、阻抗頭等設備,它們是結構力學試驗中必備的設備之一,其核心是動態力傳感器。這些儀器均為動態響應,用傳統靜態法標定無法獲得其動態靈敏度。本項目采用動態校準原理,使用正弦力法,采用快速傅利葉變化和脈沖理論,建立動態力傳感器的校準方法,并計算動態力傳感器靈敏度測量值的不確定度,確保量值的準確一致和正確傳遞。
1 ?概述
不確定度用以表征合理地賦予被測量值的分散性,是與測量結果相關聯的一個參數。
動態力傳感器的靈敏度是動態力傳感器校準的核心參數,本文以典型的NVH動態力傳感器的靈敏度校準進行不確定度評定,標準質量塊、被測動態力傳感器、標準加速度傳感器三者剛性連接到一起,并和振動臺相連,之間無相對移動,還應保證振動臺臺面的中心軸線與傳感器和質量塊的中軸線重合,以盡量減少偏心負荷和傾斜負荷的影響,控制器通過功率放大器控制振動臺臺體按照設定的頻率和加速度值振動,數據采集系統和數字電壓表通過放大器采集被測動態力傳感器和標準加速度傳感器的數據,校準原理示意圖如圖1所示。
1.1 測量依據
ISO16063-21振動與沖擊傳感器校準方法-21部分:相對于參考加傳感器的振動比較法校準;
JJF1059.1—2012 《測量不確定度評定與表示》。
1.2 環境條件
溫度:(21±5)℃,相對濕度≤70%RH,大氣壓力:(86~106)kPa,供電電源:(220±22)V,(50±1)Hz。
1.3 測量標準
測量標準的參數范圍如表1所示。
輔助設備:
①振動臺。
1)加速度波形失真度:參考頻率點小于5%,其他頻率點小于10%;2)橫向運動與縱向運動的加速度幅值之比在參考頻率點小于5%,其他頻率點小于10%;3)加速度值穩定性:在每個頻率點校準過程中優于1%;4)振動臺地基的質量應不小于振動運動部件質量的1000倍。
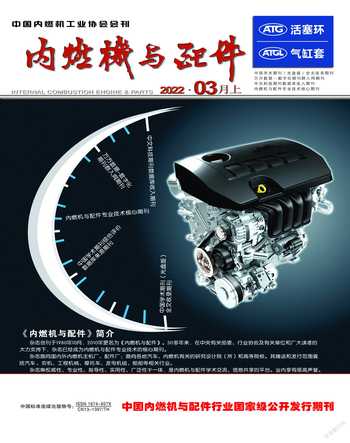
②連接機構。
將質量塊通過連接機構與傳感器緊密同軸連接,連接機構的材質及質量準確度要求與質量塊相同,如圖2所示。
③控制器。
1)頻率范圍:1Hz~3kHz;2)頻率最大允許誤差:±0.05%;3)頻率穩定度:在測量周期內,應在讀數的±0.05%之內;4)幅值穩定度:在測量周期內,應在讀數的±0.05%之內。
1.4 被測對象
動態力傳感器 ?型號:8230-003 ?廠家:B&K,實物如圖3所示。
1.5 測量過程
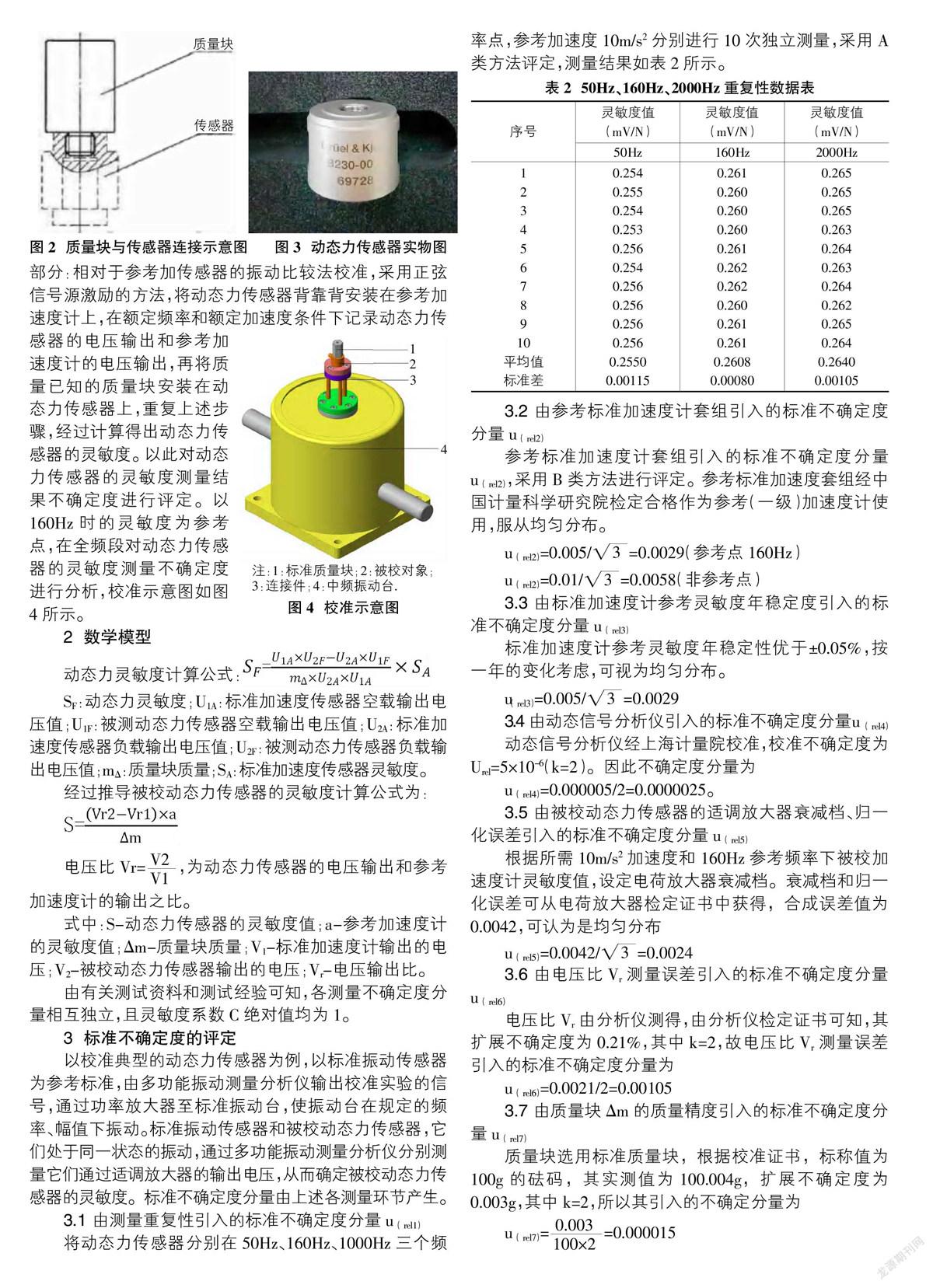
參照ISO16063-21振動與沖擊傳感器校準方法-21 部分:相對于參考加傳感器的振動比較法校準,采用正弦信號源激勵的方法,將動態力傳感器背靠背安裝在參考加速度計上,在額定頻率和額定加速度條件下記錄動態力傳感器的電壓輸出和參考加速度計的電壓輸出,再將質量已知的質量塊安裝在動態力傳感器上,重復上述步驟,經過計算得出動態力傳感器的靈敏度。以此對動態力傳感器的靈敏度測量結果不確定度進行評定。以160Hz時的靈敏度為參考點,在全頻段對動態力傳感器的靈敏度測量不確定度進行分析,校準示意圖如圖4所示。
2 ?數學模型
動態力靈敏度計算公式:
SF:動態力靈敏度;U1A:標準加速度傳感器空載輸出電壓值;U1F:被測動態力傳感器空載輸出電壓值;U2A:標準加速度傳感器負載輸出電壓值;U2F:被測動態力傳感器負載輸出電壓值;mΔ:質量塊質量;SA:標準加速度傳感器靈敏度。
經過推導被校動態力傳感器的靈敏度計算公式為:
電壓比Vr=,為動態力傳感器的電壓輸出和參考加速度計的輸出之比。
式中:S-動態力傳感器的靈敏度值;a-參考加速度計的靈敏度值;Δm-質量塊質量;V1-標準加速度計輸出的電壓;V2-被校動態力傳感器輸出的電壓;Vr-電壓輸出比。
由有關測試資料和測試經驗可知,各測量不確定度分量相互獨立,且靈敏度系數C絕對值均為1。
3 ?標準不確定度的評定
以校準典型的動態力傳感器為例,以標準振動傳感器為參考標準,由多功能振動測量分析儀輸出校準實驗的信號,通過功率放大器至標準振動臺,使振動臺在規定的頻率、幅值下振動。標準振動傳感器和被校動態力傳感器,它們處于同一狀態的振動,通過多功能振動測量分析儀分別測量它們通過適調放大器的輸出電壓,從而確定被校動態力傳感器的靈敏度。標準不確定度分量由上述各測量環節產生。
3.1 由測量重復性引入的標準不確定度分量u (rel1)
將動態力傳感器分別在50Hz、160Hz、1000Hz三個頻率點,參考加速度10m/s2分別進行10次獨立測量,采用A類方法評定,測量結果如表2所示。
3.2 由參考標準加速度計套組引入的標準不確定度分量u (rel2)
參考標準加速度計套組引入的標準不確定度分量
u (rel2),采用B類方法進行評定。參考標準加速度套組經中國計量科學研究院檢定合格作為參考(一級)加速度計使用,服從均勻分布。
u (rel2)=0.005/=0.0029(參考點160Hz)
u (rel2)=0.01/=0.0058(非參考點)
3.3 由標準加速度計參考靈敏度年穩定度引入的標準不確定度分量u (rel3)
標準加速度計參考靈敏度年穩定性優于±0.05%,按一年的變化考慮,可視為均勻分布。
u(rel3)=0.005/=0.0029
3.4 由動態信號分析儀引入的標準不確定度分量u (rel4)
動態信號分析儀經上海計量院校準,校準不確定度為Urel=5×10-6(k=2)。因此不確定度分量為
u (rel4)=0.000005/2=0.0000025。
3.5 由被校動態力傳感器的適調放大器衰減檔、歸一化誤差引入的標準不確定度分量u (rel5)
根據所需10m/s2加速度和160Hz參考頻率下被校加速度計靈敏度值,設定電荷放大器衰減檔。衰減檔和歸一化誤差可從電荷放大器檢定證書中獲得,合成誤差值為0.0042,可認為是均勻分布
u (rel5)=0.0042/=0.0024
3.6 由電壓比Vr測量誤差引入的標準不確定度分量u (rel6)
電壓比Vr由分析儀測得,由分析儀檢定證書可知,其擴展不確定度為0.21%,其中k=2,故電壓比Vr測量誤差引入的標準不確定度分量為
u (rel6)=0.0021/2=0.00105
3.7 由質量塊Δm的質量精度引入的標準不確定度分量u (rel7)
質量塊選用標準質量塊,根據校準證書,標稱值為100g的砝碼,其實測值為100.004g,擴展不確定度為0.003g,其中k=2,所以其引入的不確定分量為
u (rel7)==0.000015
3.8 由振動臺臺面橫向振動比引入的標準不確定度分量u (rel8)
被校動態力傳感器和標準加速度加速度計連接,再加上質量塊,由于高度的增加會受到振動臺橫向振動的影響,通過參考加速度計橫向靈敏度以及橫向加速度分量,產生合成的加速度輸出,可認為是特殊分布,因此振動臺橫向鎮定比引入的標準不確定度分量為
u (rel8)==0.003
3.9 由加速度失真度引入的標準不確定度分量u (rel9)
校準過程中臺面將產生諧波失真,其振動幅值輸出中必包含諧波分量貢獻的成分,可以通過頻譜分析、窄帶濾波等有效的消除,在0.2%以下,服從均勻分布,則不確定度分量為u (rel9)=0.002/=0.0012
3.10 由安裝參數引入的標準不確定度分量u (rel10)
由于動態力傳感器和參考加速度計的安裝需要對電纜進行固定,同時質量塊對安裝扭矩也有相應的要求,考慮到基座應變這些因素對測量信號的影響,在(20~1000)Hz范圍內,引入的不確定度分量不大于0.2%,在(1000~2000)Hz范圍內,引入的不確定度分量不大于0.4%,服從均勻分布,則不確定度分量為
u (rel10)=0.002/=0.0012 ? (20~1000)Hz
u (rel10)=0.004/=0.0024 ? (1000~2000)Hz
4 ?合成標準不確定度的評定
各不確定度匯總表,如表3、表4、表5所示。
5 ?擴展不確定度的評定
取k=2
U=k×u=2×0.0082=0.0164×100%=1.64%≈1.7%(50Hz)
U=k×u=2×0.0064=0.0128×100%=1.28%≈1.3%(160Hz)
U=k×u=2×0.0081=0.0162×100%=1.62%≈1.7%(2000Hz)
6 ?結語
綜上所述,得出測量范圍及不確定度如下,見表6。正弦力法動態力傳感器靈敏度不確定度的評定為相關校準方法提供了一個參考的不確定度評定方式,有利于不確定度評定方法的統一,確保量準的準確一致和正確傳遞。
參考文獻:
[1]JJF1059.1—2012,測量不確定度評定與表示[S].
[2]ISO16063-21,振動與沖擊傳感器校準方法-21部分:相對于參考加傳感器的振動比較法校準[S].
[3]GB/T 20485.21,振動與沖擊傳感器校準方法-21部分:相對于參考傳感器的振動比較法校準[S].