基于設計形態學的軍事仿生機器人研究現狀與進展
2022-02-28 09:37:48馬進胡潔朱國牛戚進
包裝工程 2022年4期
馬進,胡潔,朱國牛,戚進
(1. a.上海交通大學 感知科學與工程學院 b.上海交通大學 設計學院,上海 200240;2.新加坡南洋理工大學 機械與宇航工程學院,新加坡 639798)
隨著國際安全形勢的不斷演進,新技術革命涌入戰爭領域和現代戰爭需求的不斷增多,軍用機器人越來越多地被用于執行反恐、作戰、保障和偵察等各種任務。而天氣、地形和態勢等復雜的戰場環境給軍事機器人執行作戰任務帶來了極大的困難,對軍事機器人環境適應力提出了更高的要求。而自然界中的生物經過億萬年演化和自然選擇,進化出了神奇的特性或功能,能夠很好地適應復雜多變的環境且具有高可靠性,這為軍事機器人的研制提供了寶貴的設計激勵源。通過生物激勵模式下的設計形態學,融合多學科知識來學習、模擬和復制生物體的功能、行為或結構,進一步開展仿生學研究,從而開發軍事仿生機器人成為當前機器人研究領域的熱點。軍事仿生機器人具有良好的環境適應能力,將能夠在未來復雜的戰場環境下,提供更有效的戰場支持[1],極大地促進對未來作戰態勢的控制,甚至將帶來海陸空作戰部隊立體編成乃至作戰戰略的深刻變革。對現有的基于設計形態學的軍事仿生機器人研究現狀進行系統分析和總結,可以了解相關領域的研究熱點,探索研究前沿和研究方向,為后續設計服務于國家戰略需求提供有效參考。
1 相關概念及理論
仿生機器人作為機器人領域新興的研究方向,已成為當前國內外研究的熱點[2]。隨著仿生技術的不斷發展,仿生機器人已廣泛應用于軍事、航空航天和搶險救災等領域。相比其他領域的應用,軍事仿生機器人的工作環境更為復雜、惡劣,因此對其本體結構和運動控制等提出了更加嚴苛的要求,其研發過程是一項相當復雜的系統工程。軍事仿生機器人研發過程實質上是仿生學、心理學、信息科學等多學科的交叉融合。上世紀末美國國防高級研究計劃局(Defense Advanced Research Projects Agency,DARPA)與國防部等軍事機構率先開展了相關領域的研究,制定了一系列的開發計劃,如聯合機器人計劃(Joint Robotics Program,JRP)[3]、標準化機器人系統(Standardized Robotics Systems,SRS)[4]、未來作戰系統(Future Combat System,FCS)等[5]。融合仿生學方法的生物激勵模式下的設計形態學則為軍事仿生機器人研發提供了有效的技術手段。以下對設計形態學和軍事仿生機器人相關概念和理論進行介紹和解讀。
1.1 設計形態學
1.1.1 設計形態學內涵
設計的本質是多學科融合創新的過程。設計作為一門科學其目的在于通過設計實現產品,并開發與此相對應的知識和應用,以達到預期的設計成果[6]。而形態學是探尋生物體形態產生、發展及相關機理的學問。設計形態學作為設計領域“形態學”研究的學科,本質是對設計領域進行架構性分析,以及對典型對象各組成部分、要素、整體形態進行探究和分析,以啟迪創新的科學。從歷史的維度看,設計形態學的演進過程,從最早的藝術形態學,到從生物學、藝術學和工學等單一角度來研究的設計形態學,進而到仿生學、信息科學和心理學等多學科交叉融合的廣義設計形態學,是一個不斷創新的過程。傳統的設計形態學研究,側重于產品、建筑、平面和藝術品等造型設計與美學關系的研究,強調形與態在哲學上的統一,突出設計美學思想。而現代產品形態設計過程主要側重于功能、結構、行為、原理和藝術等的相互交融,與仿生學、信息學、工學和心理學等學科緊密關聯[7]。
生物在自然界億萬年進化和選擇中,演化出了極其精確和完善的機制以適應內外界的環境變化。研究自然界生物的優異能力及其機理,并將其應用到新技術裝備設計和制造中被稱為仿生。很多對人類社會發展產生巨大推動力的發明都源自仿生,例如模仿風滾草制造的車輪,模仿游魚發明的船櫓等。雖然仿生活動已開展了近500 萬年,但仿生學(Bionics)作為一門系統的科學,直到1960 年9 月才在俄亥俄州召開的第一次仿生學會議上被提出[8-9]。仿生學通過研究生物體功能、行為和結構原理,對其進行模仿并應用于工程領域[10]。
融合仿生學方法生物激勵模式下的設計形態學作為設計形態學的重要分支,在模仿自然界中生物激勵源的同時,全面考慮了生物體形態、動作結構、運動策略和信息感知等因素,融合了多學科知識以實現對工程領域產品設計的系統支持,兩者的有機結合促進了工程領域創新設計活動的開展。融合仿生學方法及生物激勵模式下的設計形態學,在設計過程中首先獲取自然界生物領域激勵源,再通過抽取其中蘊涵的模式來獲取“形(結構等外在形狀)”和“態(功能和行為等蘊含的內在狀態)”,并經多學科融合來構建數學模型和技術模型,并將其從生物領域類推到工程領域,最后通過美學設計、工程領域結構或材料等來實現系統裝置,完成系統的創新過程。融合仿生學方法生物激勵模式下的設計形態學過程模型見圖1。
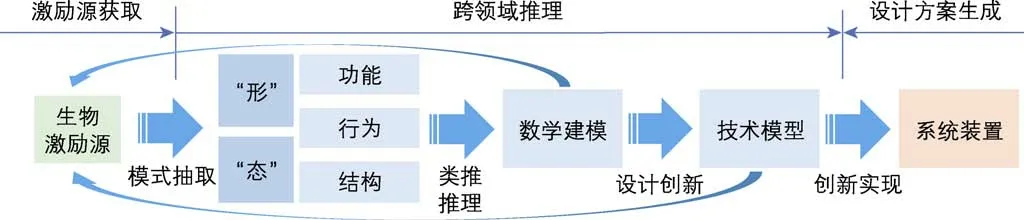
圖1 融合仿生學方法生物激勵模式下的設計形態學過程模型Fig.1 Design morphology process model in bio-inspired mode incorporating bionics method
1.1.2 設計形態學要素
設計形態學的 2 個組成元素是設計范疇下的“形”和“態”。設計形態學中的“形”是指包括組成部分、幾何尺寸、材料和色彩等結構化的外在形狀。設計產品為實現特定狀態,需要具有一定的強度、剛度。設計形態學中的“態”則是功能、原理、行為、美學特征和價值等的內在狀態。產品設計的目的即利用特定形狀來表達產品不同的功能特征或價值取向等。在設計形態學中,“形”是設計的物質載體,“態”是設計的意識傳達,二者互為依存,“形”必傳達一定的“態”,“態”則反過來決定了“形”的式樣。
融合仿生學方法生物激勵模式下的設計形態學,通過抽取生物領域激勵源中的行為、功能和原理等“態”元素,利用數學建模等方法,來分析并挖掘其中蘊含的動作或運動機理等,采用機構、材料和色彩等“形”元素對其在工程領域進行重新表達,以實現產品的創新。設計形態學中的“形”和“態”涉及多學科的交叉融合,通過多學科交叉融合能夠分析和理解事物外形表象下蘊含的“態”,并通過多學科交叉融合將其運用到新產品設計的表達中。
1.2 軍事仿生機器人
1.2.1 軍事仿生機器人內涵
軍事仿生機器人是設計形態學和軍事機器人需求的高度融合,研發人員從自然界各種生物中獲得靈感,創造出眾多能夠執行作戰和戰略任務的高性能仿生機器人,極大地促進了軍事裝備的發展。
軍事仿生機器人繼承了軍事機器人的特點,同時又具有仿生系統的特點,其具有以下戰場優勢:較高的運動靈活性和智能化程度;較強的環境適應性和戰場生存能力;絕對服從軍事指揮和命令;全天候、全方位的戰場作戰能力;較低的作戰費用等。
自20 世紀60 年代以來,國內外軍事仿生機器人的發展大致經歷了3 個主要階段:固定或可編程遙控指揮階段、具有感知功能的半自助作戰階段及具有智能決策能力的自主無人作戰階段[11]。固定或可編程遙控指揮軍事仿生機器人即按照作戰需求將描述特定功能的代碼存儲到軍事機器人內部,通過專業人員遙控指揮完成遠距離作戰任務,但該類機器人缺乏必要的反饋環節。具有感知功能的半自助軍事仿生機器人能夠通過視覺、觸覺等多種傳感器感知戰場環境并反饋到作戰指揮端。該類機器人具有感知功能和一定的決策能力,能夠處理簡單的任務,但當遇到復雜軍事任務時仍然需要人員干預。具有智能決策能力的自主無人軍事仿生機器人具有較高的智能化程度,能夠通過自主學習和推理動態來適應復雜的戰場環境,自主完成感知—決策—執行過程,成功避開障礙、智能識別目標,并主動執行搜索、救援、偵察等多種任務,無需人員操控。
1.2.2 軍事仿生機器人分類
軍事仿生機器人作為軍事機器人的重要分支,其分類較為復雜。例如,按照其運動方式的不同,可以分為跳躍軍事仿生機器人、輪式軍事仿生機器人、足式軍事仿生機器人及爬行軍事仿生機器人等[2]。按照機器人軍事功能進行分類,可分為作戰與攻擊、偵察與探險、排雷與排爆、防御與保安、后勤與維修、防化與防輻射等[12]。按照其作戰域的不同,可以劃分為陸地軍事仿生機器人、水下軍事仿生機器人和空中(間)軍事仿生機器人[2],見圖2。
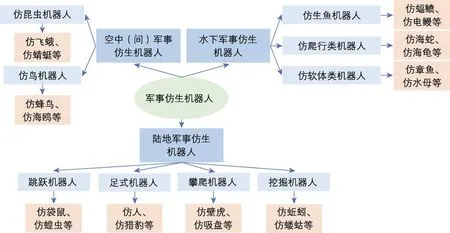
圖2 軍事仿生機器人分類Fig.2 Categories of military bionics robotics
1.3 基于設計形態學的軍事仿生機器人設計
分析和研究自然形態和人為形態的原理是構成設計形態學的基礎[13]。仿生設計方法作為設計形態學理論體系的重要組成部分,其通過設計仿生將繁復的感性模仿和瞬間思維上升到統一的理性思維,從而完成系統的設計仿生活動,這為軍事仿生機器人研發過程中從眾多構思中凝練出最準確的設計概念提供了有力的方法。基于設計形態學的軍事仿生機器人設計表現為一種由粗到精、由抽象到具體、由模糊到清晰不斷演化的過程。融合仿生學方法生物激勵模式下的設計形態學能夠利用生物學、工學、信息科學和藝術學等多各學科系統地獲取生物領域激勵源,分析、抽取并構建模型,實現從生物領域到工程領域的跨領域類推,在工程領域模擬實現自然界生物優異的運動等特性,完成新型軍事仿生機器人設計。設計形態學強調系統的理論體系、強調多學科交叉、強調融合創新,這與軍事仿生機器人設計需求不謀而合。
2 軍事仿生機器人研究現狀
隨著作戰任務和軍事需求的不斷增多,軍事仿生機器人呈現出種類繁多、形態各異、功能多樣等特點。以下從設計形態學角度出發,從陸地軍事仿生機器人、水下軍事仿生機器人和空中(間)軍事仿生機器人3 個方面對當前軍事機器人仿生結構、運動機理和行為方式研究現狀和趨勢進行總結分析。
2.1 陸地軍事仿生機器人
自然界中存在著眾多的陸生生物,為了適應不同的環境進化出了獨特的生理結構、運動機理和行為方式。從設計形態學角度出發,結合軍事功能,國內外研發人員開發了一系列陸地軍事仿生機器人,以用于執行后勤保障、偵察排險和防化防輻射等危險任務。根據任務場景和運動機理的不同,陸地軍事仿生機器人可以劃分為跳躍機器人、足式機器人、攀爬機器人和挖掘機器人等。
2.1.1 跳躍機器人
跳躍機器人研究最早起源于1969 年美國國家航天局阿波羅登月計劃[14]。隨后各國科研機構廣泛開展了跳躍機器人研究。跳躍機器人見圖3。如圖3a,東京大學NIIYAMA R 等[15]對自然界中眾多生物跳躍形態進行了深入、細致的分析,探尋了其中蘊涵的形態特征和規律,設計了一種氣動雙足跳躍機器人Mowgli,其跳躍高度能達到自身體長的1.5 倍,同時實現了對跳躍和著陸運動的靈巧控制。Mowgli 每條腿由3 個帶有McKibben 氣動系統的肌肉執行器和被動彈簧組成的全驅動關節(即髖關節、膝關節和踝關節),以及一個欠驅動關節組成。如圖 3b,德國費斯托(FESTO)公司[16]模仿袋鼠運動機理開發了由髖關節、尾部和腿部驅動構成的雙足跳躍機器人Bionic-Kangroo,其運動過程分為起跳、騰空和著陸3 個階段,并通過各關節的配合來實現跳躍和穩定著陸。如圖3c,ZAITSEV V 等[17]受沙漠蝗蟲形態啟發研制了雙足跳躍TAUB 機器人,其跳躍機構由模仿沙漠蝗蟲股骨和脛骨結構比例構成的雙腿組成,股骨和脛骨之間采用扭力彈簧連接以模仿蝗蟲腿的儲能和跳躍功能。TAUB 腿部開口角度最大可達150°,能夠在自重22.6 g 的前提下完成3 m 的跳躍高度或距離。如圖3d,SCARFOGLIERO U 等[18]對自然界中蟋蟀的腿部形態特征、結構和彈跳機理進行剖析,搭建了一款重量15 g、長度50 mm 的四足跳躍微型機器人Grillo,其能夠克服障礙物并在非結構化環境中移動,可在彈跳瞬間獲得約1.5 m/s 的初速度。
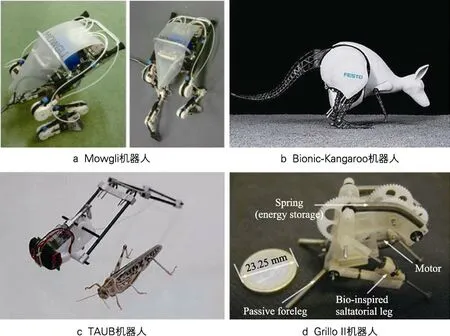
圖3 跳躍機器人Fig.3 Jumping robots
國內在跳躍機器人領域的研究也較多。南京航空航天大學[19]提取了蝗蟲蹬腿跳躍運動行為等形態特征,構建了相應的力學建模,設計了適應多種表面的連續跳躍彈跳機器人。此外,東北大學、哈爾濱工業大學也開展了跳躍機器人的探索研究。
2.1.2 足式機器人
足式機器人見圖4。在四足軍事仿生機器人研制上,1969 年為了解決崎嶇地形下單兵裝備攜帶問題,美國軍隊委托GE 開發設計了較早的軍事仿生四足步行機器人Walking Truck,見圖4a[20]。美國波士頓動力公司在美國國防部高級研究計劃局(Defense Advanced Research Projects Agency, DARPA)的支持下模仿四足哺乳動物外形和運動形態成功研制了Big-Dog 機器人,見圖4b[21],該機器人具有很強的復雜地形適應能力,從Big-Dog 機器人開始波士頓動力公司先后研發了 Cheetah,見圖 4c、Little-Dog 和Spot-mini 四足步行機器人,其中Little-Dog 機器人能夠實現對復雜地形的感知和動態規劃[22]。國內北方車輛研究所也開發了四足機器人,其能夠負載50 kg,克服30°斜坡,以完成軍事任務。
在雙足軍事仿生機器人研制上,如圖4d,美國波士頓動力公司為美軍研制了迄今為止世界上最先進的仿人機器人Atlas,其通過安裝于頭部的MultiSense SLB 感知多模態信息,能夠承載外力沖擊,根據工作環境進行動態適應性調整來完成一系列復雜動作[21]。國內北京航空航天大學開發了“匯童”BHR 類人機器人,如圖4e,能夠模仿人運動姿態,實現人機交互[23]。
此外,模擬蟑螂、蜘蛛和螞蟻等昆蟲,以及蛇等爬行類動物的外形、結構和運動形態進行仿生機器人設計并應用軍事領域,也取得了豐碩的成果。德國費斯托(FESTO)等公司先后完成了RoACH(如圖4f)[24]、Bionic-Spider(如圖4g)、GreaseFire(如圖4h)[25]和Bionic-Ant(如圖4i)等仿生機器人研制,這些成果可應用于軍事或救災等領域。
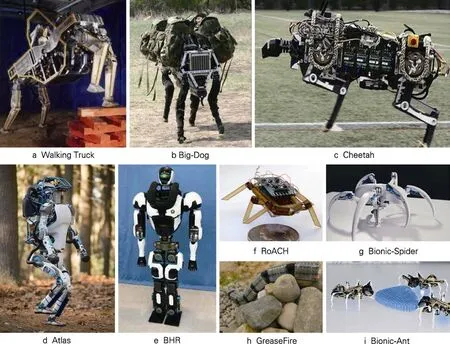
圖4 足式機器人Fig.4 Walking robots
2.1.3 攀爬機器人
攀爬機器人見圖5。攀爬機器人可以實現對目標軍事監視和追蹤功能,在軍事領域已開展了廣泛研究。如圖5a,斯坦福大學JIANG H 等[26]模仿壁虎靠腳掌剛毛與接觸物體表面間范德華力牢牢吸附于物體表面的機理,設計了一種具有方向粘附力的材料,并將其應用于太空環境下的物體抓取。如圖 5b,ESTRADA M A 等[27]分析了黃蜂能夠利用腹足爪鉤牢牢抓住物體表面拖動比身體大數倍獵物的機理,開發了能夠拖動自身體重40 倍物體的FlyCroTugs,且可通過相互協作完成軍事偵察任務。如圖5c,HAYNES G C 等[28]通過模仿松鼠靈巧攀爬的形態機理,開發了能夠動態、高速爬桿的仿生機器人RiSE,其攀爬速度可達28 cm/s,能夠到達指定位置駐停以保持低功耗,以完成軍事搜索和偵察任務。如圖5d,JI A 等[29]模仿自然界中松鼠等能夠實現攀爬功能生物的爪子形態和結構,采用彈性橡膠體和棘針相結合的方式開發了仿生爪裝置,能夠被動適應不同表面攀爬作業。如圖5e,LIAO B 等[30]受樹棲蛇纏繞爬升運動的啟發,開發了分別由一個纏繞執行器和一個伸縮執行器組成的氣動驅動纏繞式軟體爬桿機器人,它可以最大實現30.85 mm/s 的攀爬速度,最大承載載荷可達自身體重25 倍,可應用于防化防輻射等特殊環境下。
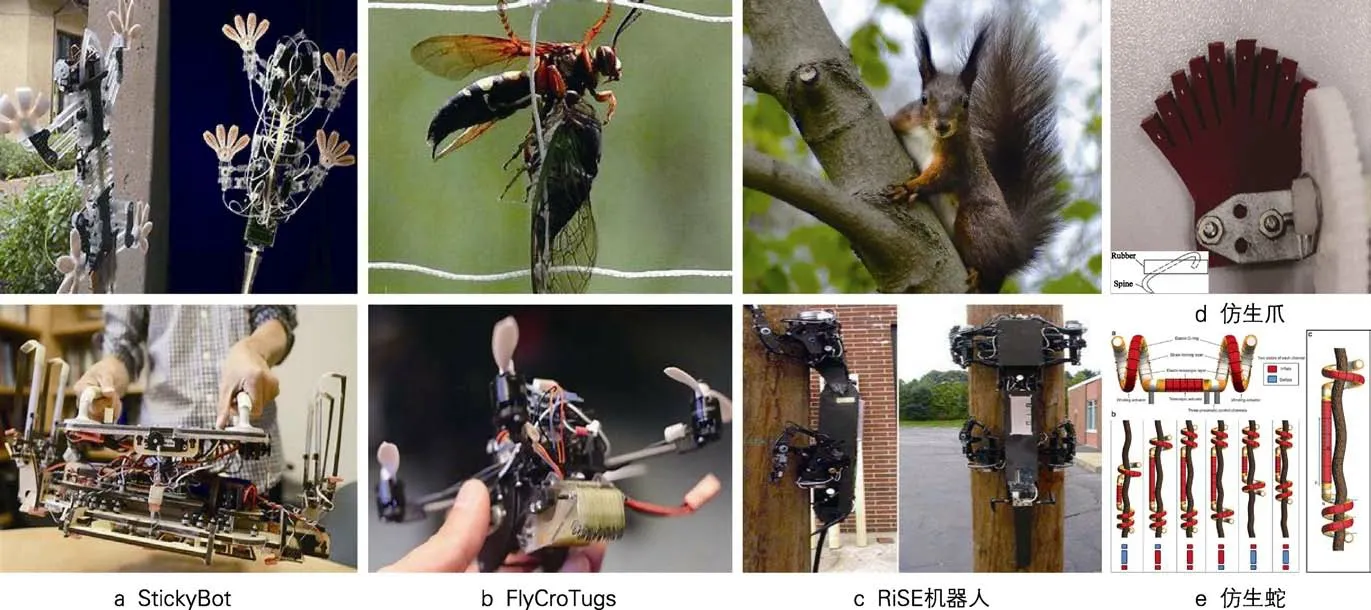
圖5 攀爬機器人Fig.5 Climbing robots
其他的陸地軍事仿生機器人,例如對蚯蚓[31]、鼴鼠[32]和穿山甲[33]等的結構形態和機理進行深入研究,而開發完成的挖掘機器人也取得了很好的效果,在功能上已能夠執行掃雷、排爆、偵察等軍事作業。
2.2 水下軍事仿生機器人
水下軍事機器人是人類利用河湖和海洋從事軍事活動不可或缺的工具。由于水下環境復雜多變,常規螺旋槳和葉輪等作為推進機構的水下軍事機器人存在適應性差、運行噪聲大等缺點,極大地限制了其應用。因此,研發結構簡單、具有高超的水中運動能力的水下軍事仿生機器人成為當前研究的重點。為此,研究人員從設計形態學角度出發,結合仿生學和機器人學,通過模仿具有高超的水中運動能力的魚類、爬行類和軟體類等水生生物體的外形結構和推進機理來進行水下軍事機器人的研制,并取得了一系列的研究成果。
2.2.1 仿生魚機器人
弗吉尼亞大學工程學院與哈佛大學研究人員[34]在美國海軍研究辦公室的支持下,從形態適應性角度,提取了黃鰭金槍魚快速游動機理,成功研制了能模仿黃鰭金槍魚水下高機動性的機器魚TunaBot(圖6a),為仿生魚的下一步研究指明了方向。蝠鲼依靠扇動兩側胸鰭進行撲翼式游動,能夠極大地減少游動產生的湍流,新加坡國立大學研究人員[35]分析了其結構等形態特征與環境適應性需求之間的關系,構建了數學和力學建模,開展了詳細的設計和優化研究,研制了具有較好靈活性和機動性的仿生蝠鲼機器人MantaDroid(圖6b),續航時間高達10 h,適用于海洋勘探等多種任務。浙江大學WANG K 等[36]受深海獅子魚的啟發,融合仿生學、材料科學等多學科知識,研制了能夠適應深海低溫、高壓等極端環境的仿生獅子魚(圖6c)。它由軟體人工肌肉驅動一對翅膀狀的柔性胸鰭并通過節律性地撲翅來實現游動,為深海軍事活動提供了潛在的解決方案。
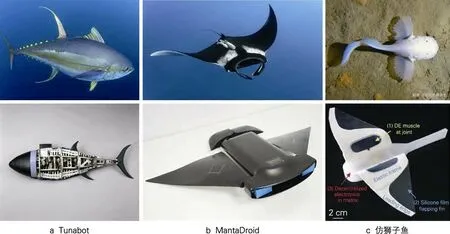
圖6 仿生魚機器人Fig.6 Fish-like robots
2.2.2 仿爬行類機器人
仿爬行類機器人見圖7。KIM H J 等[37]從設計形態學角度出發,分析并提取了海龜鰭肢結構形態特征和動作機理,建立了相應的運動學模型,分析了其具有良好靈活性和機動性的生物機制,并最終確定了相應的模型物理和運動參數開發了仿海龜機器人。瑞士洛桑聯邦理工學院KARAKASILIOTIS K 等[38]提煉了蠑螈運動形態和動作規律,搭建了一款由四個驅動器驅動的仿生機器人系統,能夠實現爬行和游動模態的任意變換,能夠滿足適多棲環境作業要求。

圖7 仿爬行類機器人Fig.7 Reptile-like robots
2.2.3 仿軟體類機器人
仿軟體類機器人見圖8。如圖8a,法國貝爾實驗室研究者[39]受僧帽水母運動形態啟發,開發了一種可成群部署的自供電新型海水監測機器人JellyBots,用于監測水面等水文參數。美國加州大學圣地亞哥分校CHRISTIANSON C 等[40]模仿章魚結構形態和水下吸收水并在后方噴出以實現前進運動的行為,研制了一款可以通過改變形狀來實現循環噴水推進的仿生章魚機器人(圖 8b),其水中運動速度可達18~32 cm/s。

圖8 仿軟體類機器人Fig.8 Mollusk-like robots
2.3 空中(間)軍事仿生機器人
億萬年的生物進化和自然選擇為有翼昆蟲、飛鳥等動物賦予了非凡的空中飛行能力,使其在生物形態、飛行方式和能量利用效率等方面達到了近乎完美的程度,這為開展基于設計形態學的空中(間)軍事仿生機器人設計提供了很好的借鑒。與陸地和水下軍事仿生機器人相比,空中(間)軍事仿生機器人具有體積小、運動靈活且不受活動空間和地形限制等特點,越來越受到世界軍事大國的重視。
2.3.1 仿昆蟲機器人
仿昆蟲機器人見圖9。美國加州大學伯克利分校CHUKEWAD Y M 等[41]模仿蒼蠅出色的飛行性能,研制了具有4 個翅膀的RoboFly 微型機器人(如圖9a),其體重僅300 mg,翼展只有3 cm,通過拍打翅膀產生的高達150 Hz 的高頻振動可以使機器人保持空中飛行,進而開展軍事偵察活動。為了模仿蜻蜓高超的飛行技能,克服旋翼飛機難以在湍流環境下穩定飛行的問題,英國防務科學與技術研究所[42]和荷蘭代夫特大學[43]通過對蜻蜓形態結構和飛行機理的長期觀察和研究,先后開發出了Skeeter(如圖9b)和DelFly Nimble 機器人(如圖9c),其中Skeeter 機器人重量不足20 g,卻可以乘風飛到1 000 m 的高空執行監視任務,而DelFly Nimble 機器人可以在充滿電的情況下實現1 000 m 以上的長距離飛行,并能夠在空中完成360°翻轉動作。受蜜蜂肢體和飛行形態的啟發,MA K Y 等[44]在美國DARPA 資助下開展了仿生形態學研究,開發了當時世界上最小的仿昆蟲機器人RoboBee(圖9d),重量僅為0.1 g,可以實現垂直起飛、懸停和轉向等操作,取得了令人難以置信的技術突破。

圖9 仿昆蟲機器人Fig.9 Insect-like robots
2.3.2 仿鳥機器人
仿鳥機器人見圖10。如圖10a,受海鷗和鯡魚鷗翼展形態和撲翼動作機理的啟發,德國費斯托(FESTO)公司開發了一款能夠在空中飛行、滑行和翱翔的撲翼飛行器SmartBird[45],其具有出色的空氣動力學性能和高效的能量利用效率,空氣動力學效率可達80%,驅動電機效率約45%。在自然界中蜂鳥既能夠像鳥類一樣主動控制翅膀形變以實現瞬時飛行,又能夠像昆蟲一樣在空中懸停,為了探究這一原理并應用于軍事領域,美國AeroVironment 公司受美國DARPA 資助,對蜂鳥飛行姿態和飛行機理進行了總結和分析,并耗時5 年設計了一款翼展16 cm,自身重量10 g 的HummingBird 機器人(圖10b)[46],它能夠完成懸停、翻筋斗等困難動作并可以執行小范圍的空中偵察任務。斯坦福大學CHANG E 等[47]觀察到鳥類在飛行過程中可以不斷主動調節羽毛姿態以適應不同飛行姿態,基于該運動形態設計了由4 個驅動器控制40 根相互彈性連接的羽毛組成欠驅動變形翼,并搭建成PigeonBot 機器人(圖10c),飛行試驗表明,其具有較高的空氣動力學性能和穩健性。

圖10 仿鳥機器人Fig.10 Bird-like robots
3 存在的問題和未來的趨勢
目前,設計形態學在軍事仿生機器人設計方面已取得了不錯的成果,但是在融合多學科知識實現跨領域創新設計等方面,仍然存在亟待解決的問題,例如,如何利用互聯網積累大量的生物實例以支持軍事仿生機器人設計,如何實現徹底的軍事機器人仿生設計,如何支持軍事仿生機器人向多棲、集群機器人發展等。
3.1 生物激勵源獲取的問題
軍事仿生機器人設計的起點是獲取具有啟發性的生物領域案例作為激勵源,激勵源的質量直接決定了設計方案的可行性和有效性。現有的生物激勵源獲取通常通過查找領域出版物、咨詢生物專家或利用搜索引擎進行關鍵詞檢索,這使設計過程容易產生“知識鴻溝”,獲得的生物知識容易缺乏全面性,軍事仿生機器人設計活動具有偶然性和盲目性,難以獲得行之有效的設計方案。與此同時,互聯網則積累了大量的生物案例和知識,缺乏有效手段對其進行合理的挖掘和應用。
為此,結合生物領域知識表示特點,從設計形態學融合多學科的角度出發,研究對應的自然語言處理方法,來對互聯網廣泛存在的結構化/非結構化生物實例進行檢索和挖掘,獲取有效實例作為激勵源推送給軍事仿生機器人研發人員,作為設計參考成為未來的研究重點。
3.2 跨領域仿生推理及方案實現的問題
自然界中生物能夠動態適應變化的復雜自然環境,軍事仿生機器人系統是通過模仿自然生物結構、行為或運動規律等形態進行構建的,但當前機器人機構設計和運動控制模型搭建等方面仍與自然界生物存在較大的差距,其中跨領域類推環節成為軍事仿生機器人達到更加逼真的仿生性能的桎梏之一。究其原因,一方面科學家對生物體結構及機理的認知和研究不足,另一方面軍事仿生機器人設計推理過程非常依賴設計人員或團隊的既往經驗,缺乏行之有效的計算機輔助下的跨領域設計推理手段,設計過程缺乏全面性。
當前深度學習理論在跨領域類推和推理方面已取得了一定的突破,為實現跨領域智能推理以生成新型設計方案提供了一種潛在的研究路徑。因此,研究從生物領域激勵源映射產生工程領域創新設計方案的跨領域智能推理算法,對促進軍事機器人的研發具有重要的現實意義。
3.3 多行為模態融合的問題
現代戰爭逐漸向全方位、立體化、多層次、大縱深和諸兵種聯合作戰方式演化。戰場局勢日趨復雜、瞬息變化,對軍事仿生機器人機動性、環境自適應能力和集群協作能力等提出了更為嚴苛的要求。目前軍事仿生機器人大多只適用于陸地、空中/間或水下單一環境,對具有更高機動性,可以根據工作環境自適應改變外形結構和適應多棲環境,以及具有更高智能的協作行為的研究十分有限。
自然界中的生物可以根據環境動態改變自己的外形、行為以適應多棲環境,例如,彈涂魚在水下可以像魚一樣游泳,在沙灘上會利用其堅韌的胸鰭來生存,有時甚至會爬到樹根上。自然界中生物也可以通過集群協作行為完成超出單個個體智能程度的任務,例如蜂群、魚群、蟻群等。軍事仿生機器人應用場景具有復雜性,多行為模態融合以實現高機動性、多棲和集群協作是仿生機器人研究領域的重要課題。
4 結語
軍事仿生機器人是一種以完成復雜或危險條件下預設戰術或戰略任務為目標,以智能化技術為核心的具有環境適應能力的仿生智能化裝備。軍事仿生機器人不僅能夠滿足未來的作戰需求,更是為搶奪第4次工業革命戰略制高點奠定了基礎,已成為世界各國競相發展的重點。當前對軍事仿生機器人的研究,根據任務的不同主要側重于對自然界中生物形態、動作結構、運動策略和信息感知等方面的模仿,研發過程通常從自然界已知激勵源出發來研究如何將其映射到工程領域,并最終形成機器人設計方案,導致軍事機器人研制存在一定的盲目性和不確定性,而隨著計算機和人工智能技術的不斷發展,互聯網積累了大量的生物實例,能夠為新型軍事機器人研制提供更為全面的信息,如何融合多學科技術充分挖掘其中蘊涵的設計形態知識,以更好地服務于新型軍事機器人研制成為設計形態學亟須研究的重點。研究表明,設計形態學方法將成為軍事仿生機器人創新設計的有力支撐,能夠顯著縮短軍事機器人系統的研制時間,增強軍事機器人系統的可靠性和穩健性,提高軍事機器人系統適應動態復雜環境和執行復雜軍事任務的能力。
猜你喜歡
天天愛科學(2022年9期)2022-09-15 01:12:54
天天愛科學(2022年4期)2022-05-23 12:41:48
當代水產(2022年3期)2022-04-26 14:26:56
科學大眾(2021年9期)2021-07-16 07:02:54
軍事文摘(2020年20期)2020-11-28 11:42:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
航空世界(2020年10期)2020-01-19 14:36:20
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17