純電動乘用車關鍵系統設計研究及分析驗證
2022-03-01 06:11:08戴鵬程王丹青
汽車電器 2022年2期
關鍵詞:系統
陸 訓,戴鵬程,王丹青,陶 娟
(奇瑞新能源汽車股份有限公司,安徽 蕪湖 241000)
1 前言
能源與環境危機的日益加重,電動汽車越來越多地被認為是解決目前污染排放和能源合理利用的有效方案,純電動汽車由于具有高效、無污染等優點,成為各汽車制造商的研究重點,如何從系統匹配的角度出發,合理選擇驅動系統關鍵零部件及其有效參數,并使其匹配效果達到最優,對改善整車能耗,提升整車能量管理水平有很大影響。
近年來,國內外許多主機廠及學者對驅動系統選型匹配及性能仿真做了大量研究,利用理論分析和仿真等手段,對驅動電機進行選型,石飛飛等基于整車性能目標,分別開展驅動電機的性能匹配及仿真分析,但多數僅為理論分析和仿真模擬,未充分開展關鍵系統的策略選型、架構分析及試驗論證;陳宏等雖然有相關的試驗測試,但多數采用標準的NEDC工況,與真實的道路條件相差較多,目前最新國標制定更加接近用戶真實駕駛行為的中國工況鮮有仿真設計研究與試驗分析論證。
基于上述分析,本文主要針對目前比較普及的純電動乘用轎車作為研究目標,首先對純電動乘用車主要的系統框架構型設計,開發相應的整車控制系統,并設計串聯協調制動的電液制動IBS系統,充分利用車輪及路面附著,提升整車制動效率及車輛穩定性能。在關鍵系統零部件選型計算及設計上,采用整車車輛動力學運動方程及利用MATLAB、AMEsim等仿真軟件確定驅動電機及動力電池相關主要參數并仿真分析,最后通過對標試驗測試結果的方法,驗證車輛關鍵系統選型滿足整車性能指標要求。
2 純電動汽車系統結構及設計分析
2.1 純電動汽車結構原理
傳動汽車是由內燃機驅動,而純電動汽車(EV)是通過動力電池儲能系統中的電能經過轉化成機械能,進而驅動整車行駛。目前主流的純電動車型大多數使用的都是單電機,本文主要針對單電機驅動整車模式的兩驅車型進行分析與設計。
純電動汽車的結構主要由電力驅動控制系統、汽車電、車身以及各種輔助裝置等部分組成。其中電力驅動控制系統決定了整車純電動汽車的結構組成及其性能特征,是電動汽車的核心。整車電力驅動控制系統主要構成及工作原理如圖1所示。
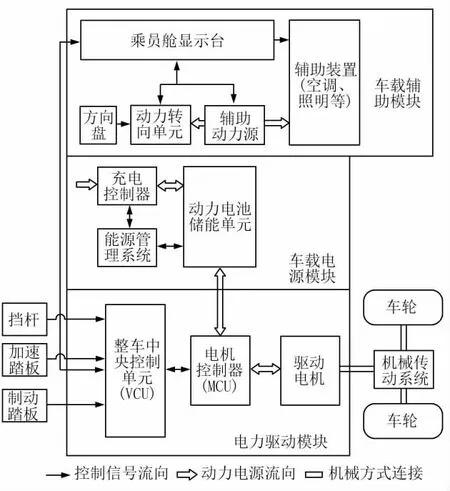
圖1 純電動汽車系統架構及工作原理
滾動阻力:

空氣阻力:

2.2 驅動系統設計
基于某純電動汽車的產品定位以及市場需求,各主機廠確定相關的整車性能目標,其中包含最高車速、最大爬坡度等動力性指標以及國標規定的綜合工況的續航里程和能量消耗率。
整車性能目標
某純電動乘用車的設計目標不僅要滿足城市代步需求,同時能夠滿足城郊跨區域行駛的自駕旅行,整車主要性能目標見表1。
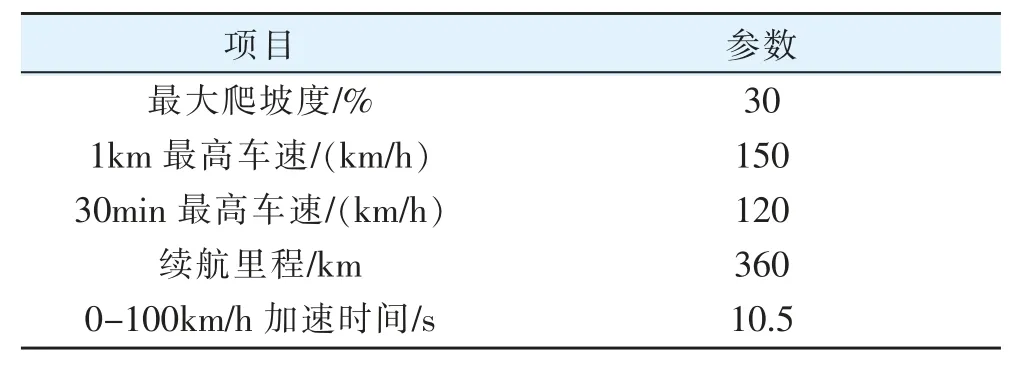
表1 整車性能目標參數
驅動電機關鍵參數設計
汽車在道路上行駛的過程中,需要克服來自地面與輪胎相互作用產生的滾動阻力和來自車身和空氣接觸而產生的空氣阻力。當汽車在坡道行駛時,還需克服其中立沿坡道的分力,即坡道阻力,汽車在加速行駛時,還需要克服汽車本身慣性力即加速阻力。因此,汽車行駛總阻力為:

坡道阻力:

加速阻力:

依據表2整車仿真輸入參數,利用MATLAB中的GUI模塊進行選型仿真分析。GUI模塊選型程序及選型結果如圖2所示。
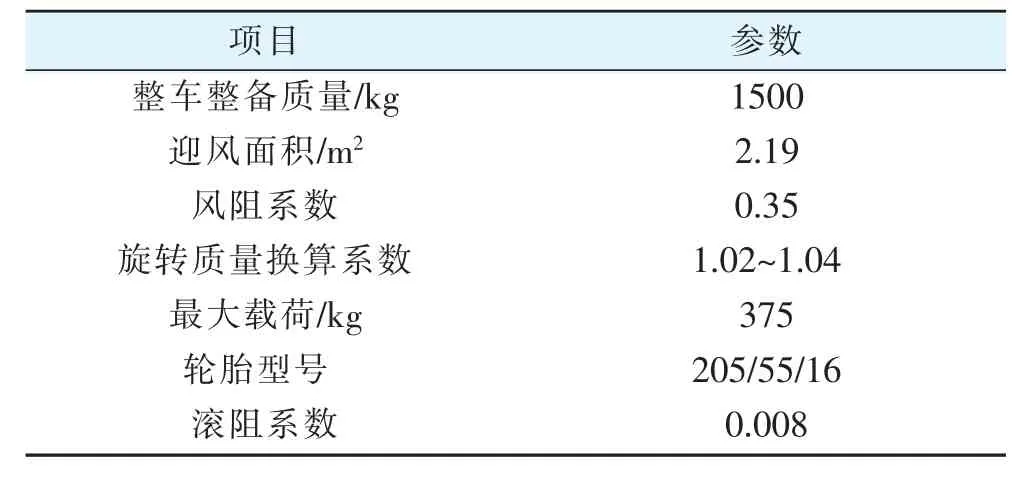
表2 整車性能仿真輸入參數

圖2 GUI模塊選型程序及選型結果
針對選型結果,一般做求整處理,結果見表3,針對所選結果,對電機進行選型,其效率map如圖3所示。
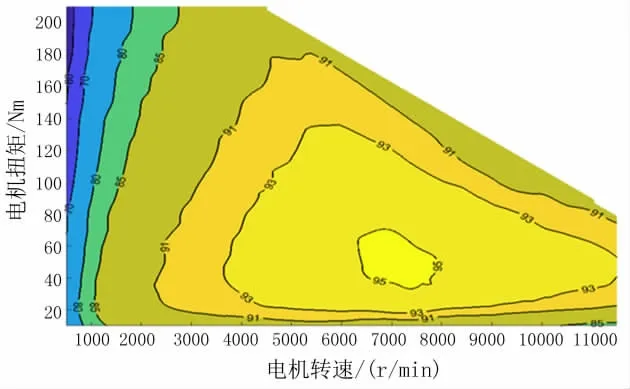
圖3 驅動電機效率map
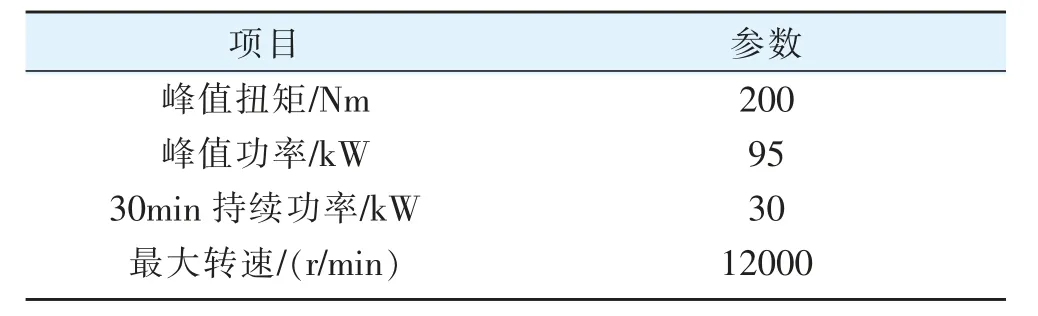
表3 驅動電機性能參數
2.3 電液助力系統設計
為了更好地提升整車能量管理水平,提高驅動系統能量回收效率,以改善能耗提升續航里程,本文制動能量回收系統方案采用串聯式電液助力制動系統,其相對并聯協調式電液助力制動系統不會產生明顯的制動感受差異。
電液助力系統 (IBS)
電液助力系統(IBS)結構上選用分體式總泵助力電子液壓式線控制動系統結構方案,通過蝸輪蝸桿/齒輪齒條減速增扭機構,將助力電機的轉動轉化為制動主缸活塞的平動,駕駛員踩踏制動踏板的反饋力由機械解耦機構提供。系統主要由電機、蝸輪蝸桿-齒輪齒條減速機構、踏板模擬器、制動主缸和中央控器等部分組成,如圖4所示。
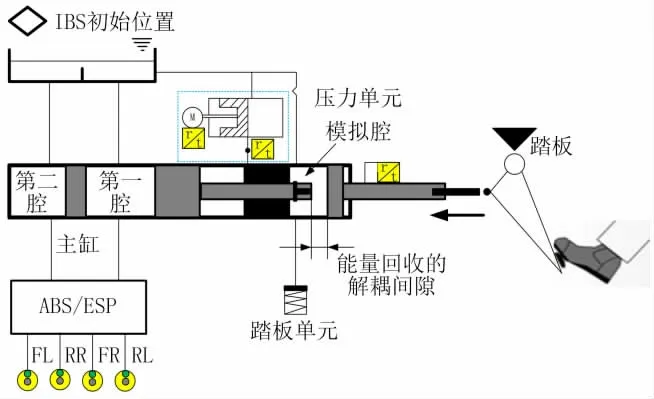
圖4 IBS系統結構示意圖
其中線控制動系統中電制動和液壓制動串聯,為解耦系統。IBS系統結構如圖4所示。當車輛啟動行駛時,當駕駛員踩下制動踏板,車輛有制動請求時,IBS進行能量計算,計算駕駛員期望的總制動力矩發給整車VCU控制電機產生制動轉矩,如果駕駛員制動力矩請求小于驅動電機產生的制動力矩,這制動液壓不介入,如圖5所示。否則制動液壓系統同步開始工作,與IBS一起共同參與車輛制動作用,如圖6所示。
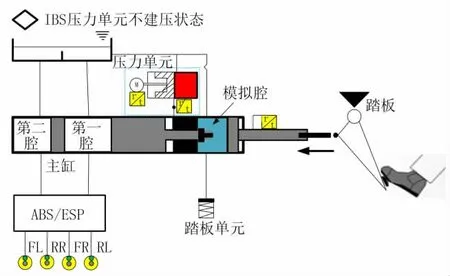
圖5 液壓系統不介入工作模式
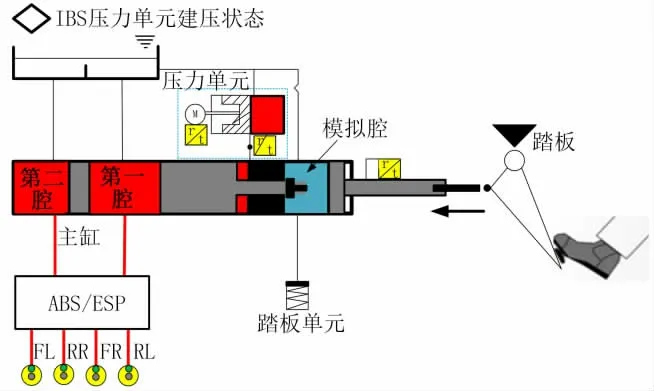
圖6 液壓系統介入工作模式
電液助力系統 (IBS)分配邏輯
在電液分配中,整車中央控制單元(VCU)主控滑行能量回收的分配,可以保證車輛在滑行階段在電池系統、電驅動系統回收能力受限的工況下,車輛也能保證駕駛感受的一致性;IBS主控制動能量回收,接收到駕駛員踩下制動踏板后,負責獲得駕駛員總制動需求,結合VCU能量回收能力及狀態,優先使用電制動來響應減速度請求,分配給VCU和IBS進行能量回收和液壓制動,改善整車制動損耗,分配策略如圖7所示。
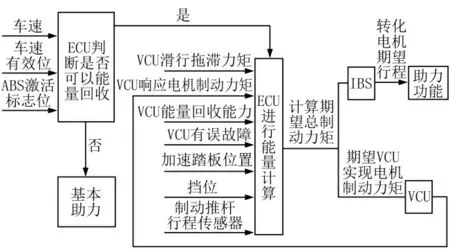
圖7 電液分配策略
2.4 動力電池參數設計方法
電動汽車續航里程與整個傳動系統綜合傳動效率、能量回收策略、整車行駛工況以及電池性能有直接關系,需通過借助仿真手段進行性能仿真,以求達到最優結果。本文動力電池選型手段,主要利用AMEsim一維仿真分析軟件,基于整車性能目標、仿真輸入參數以及驅動電機性能參數進行性能仿真,并根據仿真結果對動力電池電量進行選型設計。
整車系統仿真邏輯架構
整車系統仿真模型簡單邏輯架構由駕駛員模型、車輛動力學模型、電機模型、動力電池模型、整車控制單元(VCU)、附件系統單元組成,如圖8所示。
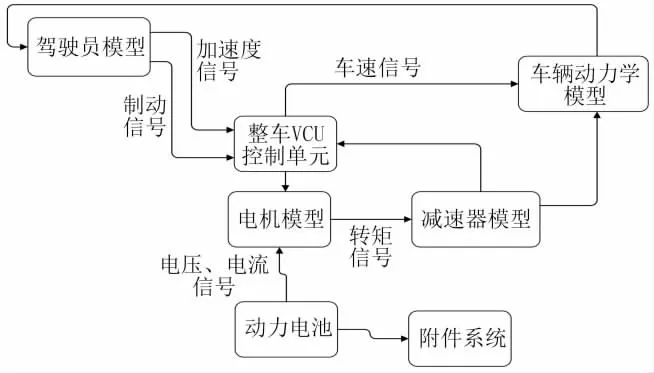
圖8 仿真邏輯架構圖
整車系統軟件仿真模型
利用AMEsim仿真軟件針對該純電動汽車進行仿真數據校核及性能達標分析,仿真分析模型如圖9所示。
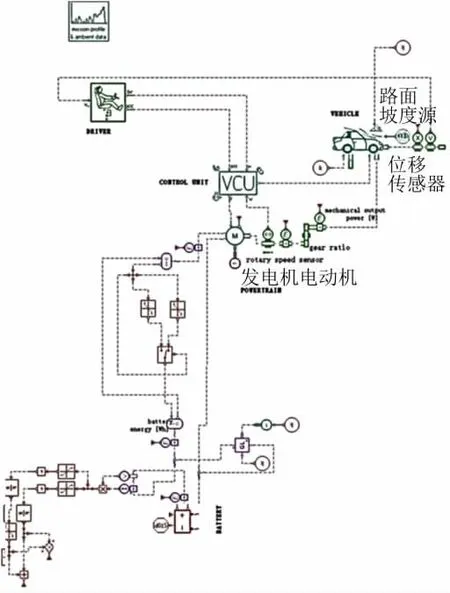
圖9 仿真分析模型
中國工況(CLTC_P)仿真
依據GB/T 18386—2021《電動汽車能量消耗量和續駛里程試驗方法 第1部分》規定,純電動乘用車目前循環測試工況主要為中國工況(CLTC_P),工況平均車速為28.96km/h,最高車速為114.0km/h,怠速比例為22.1%,行駛里程為14.48km。分為低、中、高速3部分,低速部分674s,中速部分693s,高速部分433s,總運行時間1800s,工況曲線如圖10所示。
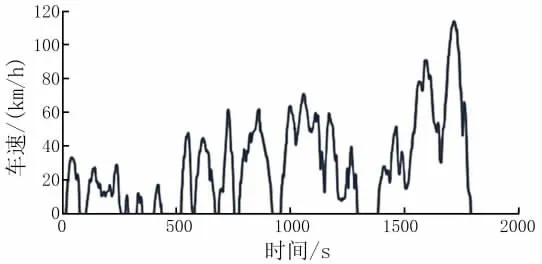
圖10 CLTC_P工況曲線
3 整車仿真結果與分析
基于中國工況曲線作為整車性能仿真的輸入工況,圖11為一個完整的中國工況部分仿真結果輸出,可以看出仿真過程實際車速與目標車速一致性保持良好,依據仿真結果,該車完全循環結束,工況里程約361.5km,滿足性能指標設計要求,此時動力電池電量約41.5kWh。
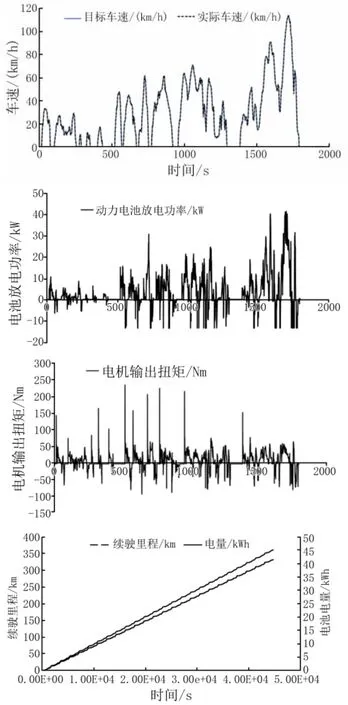
圖11 CLTC_P工況仿真結果
基于滿足整車性能目標的加速、爬坡及續航里程指標的前提下,基于目前較為常用的三元鋰電池,根據仿真結果及本文第2章節的選型結果,對動力電池進行電量及放電功率確定,其主要關鍵參數見表4。
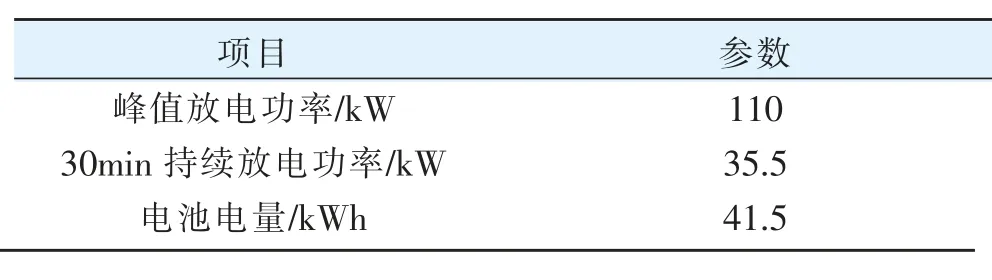
表4 動力電池關鍵參數
4 整車性能試驗設計及分析
為了驗證系統選型及仿真結果,針對整車進行動力性及續駛里程試驗測試,通過對標試驗結果進一步驗證整車仿真模型的精度,分析仿真結果的準確性。
4.1 整車動力性能測試
依據GB/T 18385—2005《電動汽車 動力性能 試驗方法》,對純電動汽車進行動力性測試,動力性試驗在專門的試驗場地開展,主要測試內容見表5。
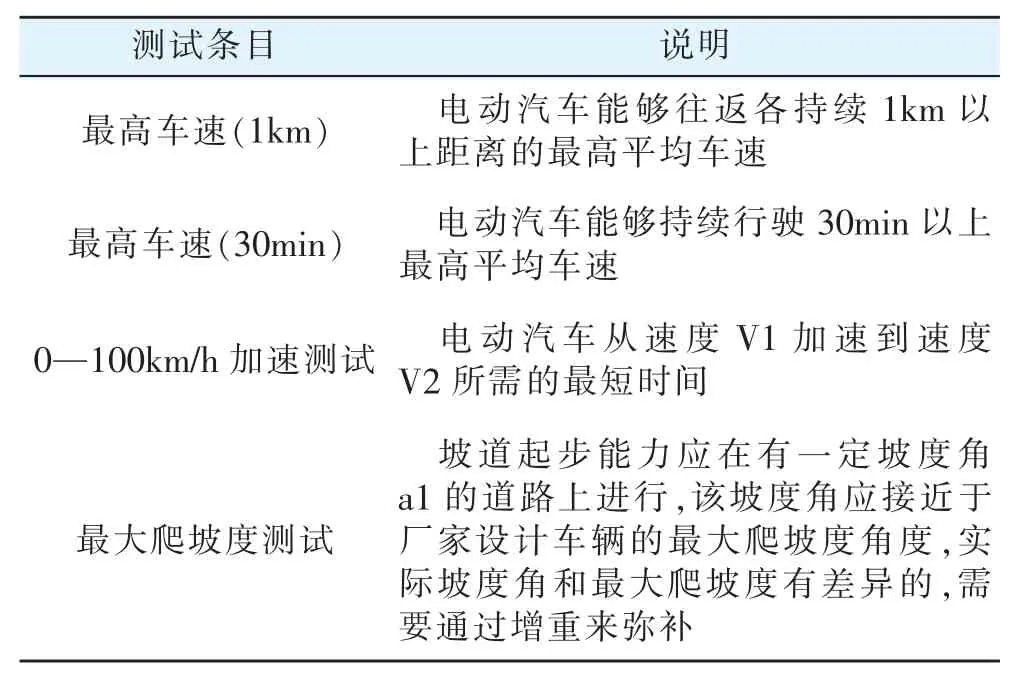
表5 主要測試內容
其中0-100km/h加速時間,仿真試驗結果對比如圖12所示。
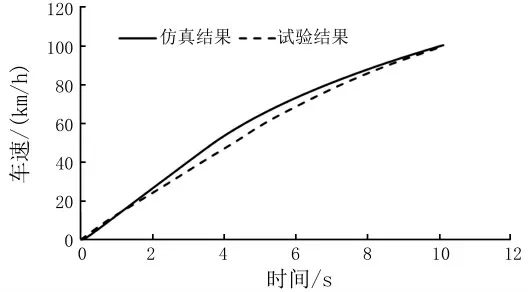
圖12 0-100km/h加速時間對比
4.2 整車經濟性能測試
依據GB/T 18386—2021《電動汽車能量消耗量和續駛里程試驗方法 第1部分》規定,對其進行中國工況常規法試驗測試,試驗主要在整車轉轂試驗室開展。
4.3 仿真和試驗結果對比與分析
通過對標仿真和試驗結果,其具體參數見表6,試驗測試驗證結果均滿足整車性能目標。
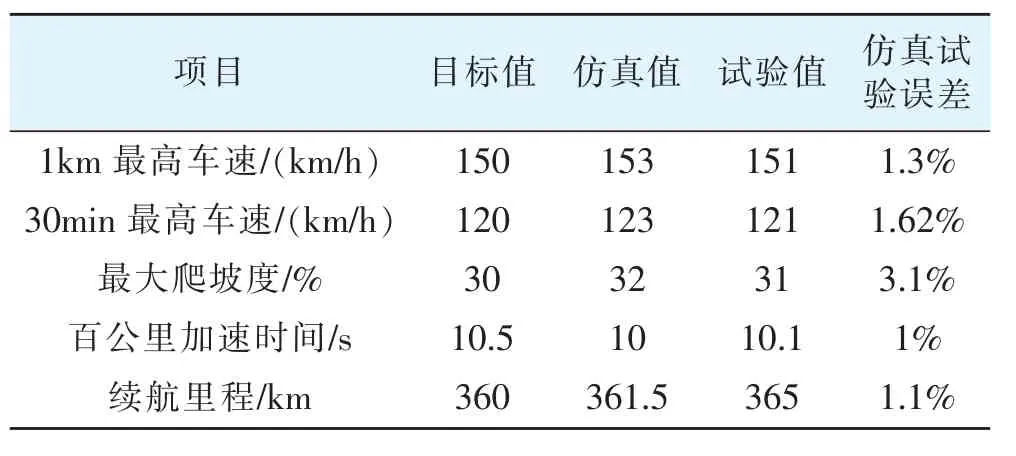
表6 仿真與試驗對比
通過對比仿真與試驗結果,動力性關鍵指標最大誤差<3%左右,經濟性誤差指標僅為1.1%。系統選型及仿真準確度較高。
5 結論
基于整車性能目標,在對整關鍵系統的選型和仿真分析中,不僅針對性能目標進行系統匹配設計,同時為了更好地提升整車能量管理水平,在制動系統能量回收策略及架構上進行策劃和分析。
依據車輛動力學計算與MATLAB和AMEsim的結合應用,確定了驅動系統及動力電池的相關參數,并對其選型結果進行實車性能試驗驗證。在續駛里程的仿真分析及試驗測試中,選用目前最新國標規定的中國工況曲線,更加貼合用戶實際駕駛行為,為改善用戶體驗提供有力保障。通過仿真和試驗結果動力性及經濟性結果的對比,進一步驗證了選型結果的準確性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
