
求解工程約束問(wèn)題的新型智能優(yōu)化算法及展望
2022-03-01 12:34:30張孟健王德光
計(jì)算機(jī)應(yīng)用 2022年2期
張孟健,王德光,2,汪 敏,楊 靖,2*
(1.貴州大學(xué)電氣工程學(xué)院,貴陽(yáng) 550025;2.貴州省互聯(lián)網(wǎng)+協(xié)同智能制造重點(diǎn)實(shí)驗(yàn)室(貴州大學(xué)),貴陽(yáng) 550025)
0 引言
典型的工程設(shè)計(jì)問(wèn)題,如管柱設(shè)計(jì)、拉力/壓縮彈簧和壓力容器設(shè)計(jì)[1-2]可以用非線性規(guī)劃(NonLinear Programming,NLP)[3]來(lái)表述,其數(shù)學(xué)模型可表述如下:

其中:X表示決策變量且X=(X1,X2,…,Xn)T;f(X)表示目標(biāo)函數(shù);gi(X)表示不等式約束;lbj、ubj分別表示決策變量Xj取值的上邊界和下邊界。
對(duì)于非線性規(guī)劃問(wèn)題中,包含了不等式約束問(wèn)題、等式約束問(wèn)題,以及混合式問(wèn)題。針對(duì)解決不等式約束的工程優(yōu)化問(wèn)題,粒子群優(yōu)化(Particle Swarm Optimization,PSO)算法[4]、布谷鳥算法、灰狼優(yōu)化算法等仿生智能優(yōu)化算法取得顯著的成效。
自PSO 算法、遺傳算法(Generic Algorithm,GA)[5]、蟻群優(yōu)化(Ant Colony Optimization,ACO)算法[6]等智能優(yōu)化算法提出以來(lái),智能優(yōu)化算法在較多的領(lǐng)域得到了廣泛的應(yīng)用,如:工程優(yōu)化、粒子濾波、多目標(biāo)優(yōu)化等。在2010—2020 年近10 年期間,許多新的仿生智能優(yōu)化算法被提出,如:蝙蝠算法(Bat Algorithm,BA)[7]、布谷鳥搜索(Cuckoo Search,CS)算法[8]、灰狼優(yōu)化(Grey Wolf Optimizer,GWO)算法[9]等。在近2018—2020 年期間,群體智能優(yōu)化算法作為人工智能領(lǐng)域的一個(gè)小的分支,得到了較大的發(fā)展。
本文選擇了發(fā)表于2019—2020 年間的6 種新型仿生智能優(yōu)化算法進(jìn)行分析研究,即哈里斯鷹優(yōu)化(Harris Hawks Optimization,HHO)算法[10]、平衡優(yōu)化(Equilibrium Optimizer,EO)算法[11]、海洋捕食者算法(Marine Predators Algorithm,MPA)[12]、政治優(yōu)化(Political Optimizer,PO)算法[13]、黏液霉菌算法(Slime Mould Algorithm,SMA)[14]、堆陣優(yōu)化(Heap-Based Optimizer,HBO)算法[15]。首先對(duì)多個(gè)基準(zhǔn)函數(shù)進(jìn)行測(cè)試,分析它們的尋優(yōu)性能;然后將6 種優(yōu)化算法應(yīng)用于3 種工程優(yōu)化問(wèn)題;最后對(duì)這6 種算法未來(lái)的研究方向進(jìn)行展望。
1 相關(guān)的優(yōu)化算法描述
1.1 HHO算法
HHO 算法的靈感來(lái)自哈里斯鷹探索獵物、突襲的不同攻擊策略[10]。該算法是基于種群的無(wú)梯度優(yōu)化技術(shù),由于捕獵場(chǎng)景的動(dòng)態(tài)性質(zhì)和獵物的逃跑模式的多樣性,哈里斯鷹可以根據(jù)實(shí)際情況選擇追捕方式,即建立合理的模型,HHO算法可應(yīng)用于任何最優(yōu)化問(wèn)題。
在尋優(yōu)的過(guò)程中,HHO 算法主要有以下階段:探索階段(Exploration phase)、從勘探到開發(fā)的過(guò)渡階段(Transition from exploration to exploitation)、突襲階段(Exploitation phase);獵物逃逸的能量參數(shù)E采用線性控制策略,且能量參數(shù)初始值E0的取值范圍為[-1,1],在突襲階段,根據(jù)參數(shù)E的取值可分為:軟圍困和硬圍困兩種。即當(dāng)|E|≥0.5 時(shí),進(jìn)行軟圍困;當(dāng)|E|<0.5 時(shí),進(jìn)行硬圍困。
文獻(xiàn)[16]提出了一種改進(jìn)的哈里斯鷹優(yōu)化算法,用于優(yōu)化室內(nèi)到達(dá)時(shí)差(Time Difference of Arrival,TDOA)定位問(wèn)題;文獻(xiàn)[17]針對(duì)參數(shù)E提出了多種不同的改進(jìn)策略,提高HHO 算法求解優(yōu)化問(wèn)題的尋優(yōu)能力和精度。
1.2 EO算法
EO 算法是一種基于控制容積強(qiáng)混合型動(dòng)態(tài)質(zhì)量平衡,從而估計(jì)平衡狀態(tài)的物理啟發(fā)式算法[11]。EO 算法的原理可簡(jiǎn)述為:首先,由四個(gè)最佳粒子的濃度算數(shù)平均值組成平衡池;其次,通過(guò)質(zhì)量平衡方程不斷更新粒子濃度來(lái)達(dá)到尋優(yōu)的效果。在EO 算法的尋優(yōu)過(guò)程中,生成概率(Generation Probability,GP)作為調(diào)節(jié)參數(shù)來(lái)控制參與概率濃度更新的發(fā)生率。
文獻(xiàn)[18]將EO 算法應(yīng)用于含高比例風(fēng)光新能源電網(wǎng)無(wú)功優(yōu)化問(wèn)題,并取得了較好的效果;針對(duì)多級(jí)閾值處理精度差、速度慢等問(wèn)題,文獻(xiàn)[19]提出一種自適應(yīng)均衡優(yōu)化算法用于優(yōu)化多級(jí)閾值優(yōu)化。
1.3 MPA
MPA 是基于捕食Lévy 游走策略和海洋捕食者的布朗運(yùn)動(dòng)以及捕食者對(duì)獵物生物覓食行為的仿生智能優(yōu)化算法[12]。根據(jù)捕食者的覓食行為,MPA 的尋優(yōu)過(guò)程主要有5 個(gè)方面:1)海洋捕食者對(duì)獵物、捕食者豐富區(qū)域分別采用Lévy游走策略和布朗游走,即算法采用Lévy 策略進(jìn)行初始化;2)覓食時(shí)捕食者的Lévy 和布朗游走策略的比例相同,即算法的尋優(yōu)過(guò)程;3)水域渦流或魚類聚集裝置(Fish Aggregating Devices,F(xiàn)ADs)效應(yīng)會(huì)對(duì)捕食者的覓食行為產(chǎn)生影響,即算法尋優(yōu)過(guò)程的調(diào)節(jié)機(jī)制;4)捕食者與獵物運(yùn)動(dòng)速度不同時(shí),捕食者會(huì)采用不同的覓食策略,即選擇不同的尋優(yōu)策略(局部搜索或全局搜索);5)捕食者有著良好的記憶,且會(huì)提醒同類成功覓食的區(qū)域,即算法根據(jù)適應(yīng)度值更新位置。文獻(xiàn)[20]針對(duì)水文預(yù)測(cè)預(yù)報(bào)問(wèn)題中的徑流預(yù)測(cè),提出了一種混合MPA 的自適應(yīng)神經(jīng)模糊推理系統(tǒng)的預(yù)測(cè)方法;文獻(xiàn)[21]提出一種自適應(yīng)變異策略的MPA,用于光伏參數(shù)的識(shí)別,進(jìn)而提高識(shí)別精度。
1.4 PO算法
PO 算法是一種基于政治激勵(lì)的新型優(yōu)化算法[13]。PO算法的結(jié)構(gòu)主要有五個(gè)階段,包括:政黨組建和選區(qū)分配(Party formation and constituency allocation)、選舉活動(dòng)(Election campaign)、政黨轉(zhuǎn)換(Party switching)、政黨間選舉(Inter-party election)和議會(huì)事務(wù)(Parliamentary affairs)。在PO 算法的尋優(yōu)過(guò)程中,政黨組建和選區(qū)分配階段作為初始化,其余四個(gè)階段循環(huán)執(zhí)行至最大迭代次數(shù)或?qū)?yōu)精度。
文獻(xiàn)[22]提出了一種基于基因表達(dá)數(shù)據(jù)的二元政治優(yōu)化器來(lái)解決特征選擇問(wèn)題,并對(duì)多組生物數(shù)據(jù)進(jìn)行分類。
1.5 SMA
SMA 主要是一種模擬黏菌在覓食過(guò)程中的行為和形態(tài)變化的仿生智能優(yōu)化算法[14]。在SMA 中,使用權(quán)重來(lái)模擬黏菌在覓食過(guò)程中產(chǎn)生的正負(fù)反饋,從而形成三種不同的形態(tài),即接近食物(Approach food)、包圍食物(Wrap food)、擺動(dòng)(Oscillation)。文獻(xiàn)[23]針對(duì)光伏電池的單二極管模型和雙二極管模型,提出了一種基于自適應(yīng)策略的SMA 的參數(shù)估計(jì)方法。
1.6 HBO算法
HBO 算法是受企業(yè)中的等級(jí)結(jié)構(gòu)(Corporate Rank Hierarchy,CRH)啟發(fā)而提出的一種新型優(yōu)化算法[15]。該算法的過(guò)程可分為四個(gè)步驟:1)對(duì)企業(yè)等級(jí)結(jié)構(gòu)(CRH)建模;2)對(duì)下屬與直接上司之間的互動(dòng)進(jìn)行數(shù)學(xué)建模;3)建立同事間互動(dòng)的數(shù)學(xué)模型;4)員工為完成一項(xiàng)任務(wù)而作出的自我貢獻(xiàn)。
1.7 分析小結(jié)
上述的6 種優(yōu)化算法,按其性質(zhì)可以分為三類:1)基于動(dòng)物、生物等覓食行為的群智能優(yōu)化算法(即HHO 算法、MPA、SMA);2)基于社會(huì)行為的仿生智能優(yōu)化算法(即PO 算法、HBO 算法);3)基于物理性質(zhì)的仿生智能優(yōu)化算法(即EO算法)。
從6 種算法的結(jié)構(gòu)上可知,HHO 算法、EO 算法和MPA 在尋優(yōu)的機(jī)制上相近,均具有記憶性能;PO 算法是根據(jù)政治選舉的特征,建立合理的模型即能達(dá)到尋優(yōu)的效果;SMA 是一種基于生物覓食行為的優(yōu)化算法,由于在尋優(yōu)時(shí)會(huì)在多個(gè)機(jī)制間轉(zhuǎn)換,增加尋優(yōu)的時(shí)間;而HBO 算法在結(jié)構(gòu)上是基于企業(yè)等級(jí)結(jié)構(gòu)(CRH)的建模,并不能從理論上保證該結(jié)構(gòu)的優(yōu)越性。
2 實(shí)驗(yàn)與結(jié)果分析
為了分析6 種算法的尋優(yōu)能力,選擇了如表1 所示的10種基準(zhǔn)測(cè)試函數(shù)。各算法的參數(shù)設(shè)置如表2 所示,迭代次數(shù)為1 000,維度為50,種群規(guī)模設(shè)為25,每個(gè)測(cè)試函數(shù)獨(dú)立尋優(yōu)30 次。此外,尋優(yōu)仿真測(cè)試的實(shí)驗(yàn)環(huán)境:Windows 7 操作系統(tǒng),Intel Core i5-4210U CPU @2.4 GHz,4 GB 內(nèi)存,Matlab 2018a。

表1 基準(zhǔn)測(cè)試函數(shù)Tab.1 Benchmark functions

表2 參數(shù)設(shè)置Tab.2 Parameter setting
對(duì)6 種算法的尋優(yōu)性能及其有效性,本文設(shè)計(jì)了2 組對(duì)比實(shí)驗(yàn):1)6 種優(yōu)化算法對(duì)10 種基準(zhǔn)測(cè)試函數(shù)(5 個(gè)單峰函數(shù)、5 個(gè)多峰函數(shù))進(jìn)行尋優(yōu)仿真;2)對(duì)3 種不等式約束的工程優(yōu)化問(wèn)題進(jìn)行應(yīng)用比較。
2.1 算法復(fù)雜度
由于測(cè)試平臺(tái)的不同,同一優(yōu)化算法的尋優(yōu)消耗時(shí)間也會(huì)不同。因此,須對(duì)算法的結(jié)構(gòu)進(jìn)行分析,6 種優(yōu)化算法的計(jì)算復(fù)雜度詳見表3。表3 中:N表示算法的種群數(shù)量;T表示算法的迭代次數(shù);D表示求解問(wèn)題的維度;Cobj表示目標(biāo)函數(shù)的代價(jià)。

表3 不同算法的復(fù)雜度對(duì)比Tab.3 Complexity comparison of different algorithms
2.2 尋優(yōu)結(jié)果
統(tǒng)計(jì)理論在群體智能優(yōu)化算法性能分析中有著廣泛的運(yùn)用。為了驗(yàn)證選擇的6 種優(yōu)化算法的性能,針對(duì)同一基準(zhǔn)函數(shù)獨(dú)立尋優(yōu)測(cè)試30 次。尋優(yōu)結(jié)果的統(tǒng)計(jì)值包括:最優(yōu)值(Best)、最差值(Worst)、平均值(Mean)、標(biāo)準(zhǔn)差(Standard deviation,STD)、尋優(yōu)時(shí)間和中位數(shù)(Median),如表4~5 所示。表4~5 中:除尋優(yōu)時(shí)間外,加粗字體綜合考慮了對(duì)比算法的尋優(yōu)性能;尋優(yōu)時(shí)間僅考慮對(duì)比算法的搜索時(shí)間。
從表4 中可以看出,對(duì)于單峰測(cè)試函數(shù)F1~F5的尋優(yōu)仿真,除函數(shù)F1和F3外,PO 算法的尋優(yōu)結(jié)果均優(yōu)于其他5 種群智能優(yōu)化算法;對(duì)于F1和F3,SMA 雖然能和PO 算法達(dá)到同樣的尋優(yōu)值,但是尋優(yōu)時(shí)間遠(yuǎn)遠(yuǎn)比PO 算法長(zhǎng),即SMA 的收斂速度差。

表4 基準(zhǔn)測(cè)試函數(shù)尋優(yōu)結(jié)果(單峰)Tab.4 Results of benchmark functions(unimodal)
從表5 中可以看出,針對(duì)測(cè)試函數(shù)F6的尋優(yōu),HHO 算法均優(yōu)于其他5 種優(yōu)化算法;針對(duì)測(cè)試函數(shù)F7的尋優(yōu),HHO 算法、PO 算法及SMA 能夠達(dá)到同樣的尋優(yōu)精度,但SMA 的尋優(yōu)時(shí)間最長(zhǎng),即收斂速度差;針對(duì)測(cè)試函數(shù)F8的尋優(yōu),除HBO 算法外,其他5 種優(yōu)化算法均能達(dá)到最優(yōu)的尋優(yōu)值,EO算法的尋優(yōu)時(shí)間較短,SMA 的尋優(yōu)時(shí)間較長(zhǎng);針對(duì)測(cè)試函數(shù)F9和F10的尋優(yōu),PO 算法的尋優(yōu)結(jié)果在6 種優(yōu)化算法中最佳,此外,HBO 算法的尋優(yōu)時(shí)間較短,但兩個(gè)函數(shù)均沒有達(dá)到最佳的尋優(yōu)值。

表5 基準(zhǔn)測(cè)試函數(shù)尋優(yōu)結(jié)果(多峰)Tab.5 Results of benchmark functions(multimodal)
為了說(shuō)明6 種優(yōu)化算法的收斂速度,對(duì)10 種測(cè)試函數(shù)的尋優(yōu)過(guò)程曲線如圖1~2 所示。圖1(a)~(e)分別表示對(duì)比算法對(duì)5 種單峰測(cè)試函數(shù)的尋優(yōu)曲線趨勢(shì);圖2(a)~(e)分別表示對(duì)比算法對(duì)5 種多峰測(cè)試函數(shù)的尋優(yōu)曲線趨勢(shì)。橫坐標(biāo)表示對(duì)比算法的最大迭代次數(shù),均為1 000;縱坐標(biāo)表示對(duì)測(cè)試函數(shù)的尋優(yōu)值的對(duì)數(shù)(lg)。

圖1 六種算法的尋優(yōu)曲線比較(單峰)Fig.1 Comparison of convergence curves of six algorithms(unimodal)
從圖1 中可以看出,對(duì)于單峰函數(shù)F1~F5的尋優(yōu),除F4外,PO 算法分別在400 次、850 次、450 次和50 次迭代附近達(dá)到了理論最優(yōu)值;而SMA 可以在800 次迭代附近搜索到函數(shù)F1和F3的理論最優(yōu)值。從圖2 中可以看出,PO 算法對(duì)函數(shù)F8和F10的尋優(yōu)均在100 次迭代內(nèi)達(dá)到理論最優(yōu)值。對(duì)于F8的尋優(yōu),HHO 算法、EO 算法、MPA、PO 算法和SMA 均可以搜索到理論最優(yōu)值;對(duì)于函數(shù)F9的尋優(yōu),SMA 和PO 算法均在800 次迭代達(dá)到了最優(yōu)值。總的來(lái)說(shuō),從測(cè)試函數(shù)的統(tǒng)計(jì)結(jié)果和尋優(yōu)收斂曲線均可以看出,PO 算法在6 種對(duì)比算法中的性能較佳,HBO 算法的尋優(yōu)精度較低,可以進(jìn)一步地改進(jìn)研究。

圖2 六種算法的尋優(yōu)曲線比較(多峰)Fig.2 Comparison of convergence curves of six algorithms(multimodal)
2.3 分析小結(jié)
從基準(zhǔn)測(cè)試函數(shù)的仿真結(jié)果來(lái)看,PO 算法能夠達(dá)到測(cè)試函數(shù)的理論最優(yōu)值,且尋優(yōu)時(shí)間較短,即PO 算法的尋優(yōu)精度整體上優(yōu)于其他5 種算法,且收斂速度較快,穩(wěn)定性較好。針對(duì)10 種基準(zhǔn)測(cè)試函數(shù)的尋優(yōu)結(jié)果,在不考慮尋優(yōu)時(shí)間的情況下,6 種優(yōu)化算法進(jìn)行排名:PO >SMA >HHO >EO >MPA >HBO;結(jié)合表3 的各個(gè)算法的計(jì)算復(fù)雜度來(lái)看,SMA的收斂速度較差,在確保尋優(yōu)精度的前提下對(duì)SMA 進(jìn)行改進(jìn)。由于HBO 算法的尋優(yōu)精度低,需要進(jìn)一步地改進(jìn)來(lái)增加尋優(yōu)精度。
此外,各優(yōu)化算法的理論性研究不足,需要從理論上對(duì)提出的算法進(jìn)行收斂性分析[24]。對(duì)于優(yōu)化算法的改進(jìn),建議如下:算法的種群可以采用混沌理論來(lái)提高其遍歷性;控制參數(shù)同樣可以運(yùn)用混沌映射或非線性策略進(jìn)行調(diào)節(jié),提高算法的尋優(yōu)性能;混合不同的優(yōu)化算法優(yōu)點(diǎn)來(lái)提高被改進(jìn)算法的尋優(yōu)精度等[25]。
3 工程約束問(wèn)題的應(yīng)用對(duì)比
為進(jìn)一步分析6 種優(yōu)化算法的性能,選擇了工程中3 種非線性約束優(yōu)化問(wèn)題:工字梁設(shè)計(jì)問(wèn)題、三桿桁架設(shè)計(jì)問(wèn)題和減速器設(shè)計(jì)問(wèn)題。這3 種工程優(yōu)化問(wèn)題的具體描述詳見文獻(xiàn)[2]。6 種算法的種群數(shù)量設(shè)置為25(其他參數(shù)設(shè)置詳見表2);迭代次數(shù)設(shè)為1 000;對(duì)求解每個(gè)工程約束優(yōu)化問(wèn)題分別獨(dú)立運(yùn)行30 次;并分析其尋優(yōu)結(jié)果的統(tǒng)計(jì)值:最優(yōu)值、最差值、平均值、標(biāo)準(zhǔn)差、尋優(yōu)時(shí)間。
3.1 工字梁設(shè)計(jì)問(wèn)題
工字梁設(shè)計(jì)問(wèn)題[2]的目標(biāo)是在承受最小的工字梁的垂直擾度,同時(shí)滿足給定載荷下的截面面積和應(yīng)力約束。當(dāng)梁長(zhǎng)L=200 cm,彈性模量H=2×104kN/cm2,最大彎曲力P=600 kN 和Q=50 kN 時(shí),垂直撓度f(wàn)(x)=PL3/48HI最小(單位為cm),其中:I為使用材料的截面慣矩(單位為cm4)。
該問(wèn)題的目標(biāo)函數(shù)及約束條件表述如下:

其中:決策變量(x1,x2,x3,x4)分別對(duì)應(yīng)工字梁設(shè)計(jì)的上、下梁的寬度(b)、上梁和下梁底部之間的高度(h)、銜接梁的寬度(tw),以及上、下梁的厚度(tf)。各變量的取值范圍為:10≤b≤50,10≤h≤80,0.9≤tw≤5,0.9≤tf≤5。
根據(jù)該問(wèn)題的目標(biāo)函數(shù)及約束條件,6 種算法的計(jì)算結(jié)果如表6~7 所示。

表6 工字梁設(shè)計(jì)的最優(yōu)結(jié)果對(duì)比Tab.6 Comparison of best results of I-beam design

表7 工字梁設(shè)計(jì)的統(tǒng)計(jì)結(jié)果對(duì)比Tab.7 Comparison of the statistical results of I-beam design
對(duì)于工字梁設(shè)計(jì)問(wèn)題,從表6~7 可知:6 種算法的均值(Mean)排名為:EO=MPA=SMA >HHO >PO >HBO;對(duì)應(yīng)的標(biāo)準(zhǔn)差(STD)可以看出MPA 的穩(wěn)定性優(yōu)于EO 算法,EO 算法優(yōu)于SMA;然而在尋優(yōu)結(jié)果相近的情況下,EO 算法的尋優(yōu)時(shí)間比MPA 和SMA 的尋優(yōu)時(shí)間短。
3.2 三桿桁架設(shè)計(jì)問(wèn)題
三桿桁架設(shè)計(jì)問(wèn)題[2]的目標(biāo)是在靜壓下桁架的體積應(yīng)盡量減小,且滿足每個(gè)桁架構(gòu)件上受應(yīng)力(σ)約束。該問(wèn)題可轉(zhuǎn)化為最佳橫截面積(A1,A2)問(wèn)題,其目標(biāo)函數(shù)及約束條件表述如下:

針對(duì)三桿桁架設(shè)計(jì)問(wèn)題的目標(biāo)函數(shù)及約束條件,6 種算法的計(jì)算結(jié)果詳見表8~9。

表8 三桿桁架設(shè)計(jì)的最優(yōu)結(jié)果對(duì)比Tab.8 Comparison of best results of three-bar truss design
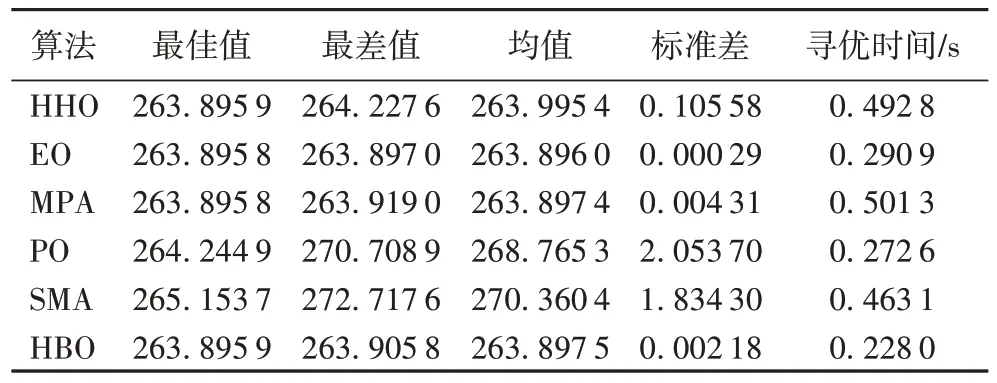
表9 三桿桁架設(shè)計(jì)的統(tǒng)計(jì)結(jié)果對(duì)比Tab.9 Comparison of the statistical results of three-bar truss design
對(duì)于三桿桁架設(shè)計(jì)問(wèn)題,從表8~9 可知:6 種算法的均值(Mean)排名為:EO=MPA >HHO=HBO >PO >SMA;對(duì)應(yīng)的標(biāo)準(zhǔn)差(STD)可得EO 算法的穩(wěn)定性優(yōu)于HBO 算法;然而HBO 算法的尋優(yōu)時(shí)間比EO 算法的尋優(yōu)時(shí)間短。
3.3 減速器設(shè)計(jì)問(wèn)題
減速器設(shè)計(jì)問(wèn)題[2]是典型的機(jī)械方面的優(yōu)化問(wèn)題,其目標(biāo)是使減速器的總重量最小。該問(wèn)題包括面的寬度(x1),齒的模量(x2),小齒輪上的齒數(shù)(x3),軸承之間的軸1 的長(zhǎng)度(x4),軸承之間的軸2 的長(zhǎng)度(x5),軸1 的直徑(x6),軸2 的直徑(x7)。約束條件主要有:齒輪齒的彎曲應(yīng)力、表面應(yīng)力、軸1 和2 的橫向偏轉(zhuǎn)傳遞的力、軸1 和2 之間的應(yīng)力等。
該問(wèn)題的目標(biāo)函數(shù)及約束條件表述如下:

其中:2.6≤x1≤3.6,0.7≤x2≤0.8,17≤x3≤28,7.3≤x4≤8.3,7.8≤x5≤8.3,2.9≤x6≤3.9,5≤x7≤5.5。
針對(duì)減速器設(shè)計(jì)問(wèn)題的目標(biāo)函數(shù)及約束條件,6 種算法的計(jì)算結(jié)果如表10~11 所示。

表10 減速器設(shè)計(jì)的最優(yōu)結(jié)果對(duì)比Tab.10 Comparison of best results of speed reducer design

表11 減速器設(shè)計(jì)的統(tǒng)計(jì)結(jié)果對(duì)比Tab.11 Comparison of the statistical results of speed reducer design
對(duì)于減速器設(shè)計(jì)問(wèn)題,從表10~11 可知:6 種算法的均值(Mean)排名為:EO=MPA=HBO >SMA >PO >HHO;對(duì)應(yīng)的標(biāo)準(zhǔn)差(STD)可以看出EO 的穩(wěn)定性優(yōu)于HBO 算法,EO 算法優(yōu)于MPA;然而在尋優(yōu)結(jié)果相近的情況下,HBO 算法的尋優(yōu)時(shí)間比EO 算法和MPA 的尋優(yōu)時(shí)間短。
4 結(jié)語(yǔ)
針對(duì)近兩年來(lái)提出的6 種新型智能優(yōu)化算法在求解工程約束問(wèn)題上的應(yīng)用:首先,基于對(duì)基準(zhǔn)測(cè)試函數(shù)的仿真實(shí)驗(yàn),分析了6 種算法的收斂速度、尋優(yōu)精度和穩(wěn)定性等性能;然后,將6 種算法用于求解3 種典型的非線性約束工程優(yōu)化問(wèn)題并分析性能。
基準(zhǔn)測(cè)試函數(shù)的尋優(yōu)結(jié)果表明:PO 算法的尋優(yōu)精度整體上優(yōu)于其他5 種算法,且收斂速度較快、穩(wěn)定性較好;在不考慮尋優(yōu)時(shí)間的情況下,6 種優(yōu)化算法進(jìn)行排名:PO>SMA>HHO>EO>MPA>HBO;結(jié)合各算法的計(jì)算復(fù)雜度和尋優(yōu)的消耗時(shí)間,SMA 的收斂速度較差,在確保尋優(yōu)精度的前提下對(duì)SMA 進(jìn)行改進(jìn)。由于HBO 算法的尋優(yōu)精度低,需要進(jìn)一步地改進(jìn)來(lái)提升尋優(yōu)精度;從尋優(yōu)的結(jié)果來(lái)看,其他的算法亦存在收斂精度較低、收斂速度較慢、穩(wěn)定性差等問(wèn)題,因此需要進(jìn)一步地改進(jìn)研究。改進(jìn)的方法可采用反向?qū)W習(xí)策略、非線性控制策略、混沌映射理論、混合算法等。從工程優(yōu)化問(wèn)題的求解來(lái)看,不同的優(yōu)化算法對(duì)于不同的工程問(wèn)題,其尋優(yōu)的性能存在差異,即符合“No free lunch”理論[26]。
在未來(lái)的研究中,可以將收斂性能較好的算法應(yīng)用于不同的實(shí)際問(wèn)題,如:參數(shù)估計(jì)、特征選擇與分類、非線性規(guī)劃等工程問(wèn)題;鑒于新型智能優(yōu)化算法的理論性研究不足,需要進(jìn)一步從理論上去分析和證明提出的智能優(yōu)化算法的收斂性。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
