基于雙焦點(diǎn)離心測距的移動(dòng)無線傳感網(wǎng)定位算法
2022-03-01 13:12:48趙麗芬
計(jì)算機(jī)工程與設(shè)計(jì) 2022年2期
趙麗芬,申 毅,田 波,王 中
(1.銅仁學(xué)院 大數(shù)據(jù)學(xué)院,貴州 銅仁 554300;2.東南大學(xué) 信息科學(xué)與工程學(xué)院,江蘇 南京 211189)
0 引 言
就移動(dòng)無線傳感網(wǎng)(mobile wireless sensor network,M-WSN)定位技術(shù)而言,可分為直接測距和間接測距兩種定位方法[1-4]。直接測距方法在實(shí)踐中一般利用多普勒位移來直接計(jì)算定位節(jié)點(diǎn)與基準(zhǔn)節(jié)點(diǎn)的距離及角度,從而獲取節(jié)點(diǎn)的定位坐標(biāo)[5]。但是,直接測距方法需要頻繁進(jìn)行數(shù)據(jù)定位及頻率測量。間接測序方法主要借助DV-Hop機(jī)制來實(shí)現(xiàn)定位,但也存在因頻繁進(jìn)行鄰域迭代而出現(xiàn)精度不高的問題。
綜合直接測距和間接測距方法的特點(diǎn),當(dāng)前國內(nèi)外研究者提出了一系列的解決方法。如Li等[6]引入信號(hào)直測方法來改善DV-Hop算法的錨節(jié)點(diǎn)定位精度,特別是采取迭代模式來進(jìn)一步優(yōu)化待測角度,可將待定位節(jié)點(diǎn)坐標(biāo)精度提升至1跳鄰域內(nèi)。但是,該方法在節(jié)點(diǎn)移動(dòng)速度較高時(shí),需要頻繁針對節(jié)點(diǎn)距離進(jìn)行測量,使得節(jié)點(diǎn)能量消耗較高。Zou等[7]提出通過設(shè)置兩組正交錨節(jié)點(diǎn)來實(shí)時(shí)捕捉節(jié)點(diǎn)坐標(biāo)。然而,該算法的定位過程中雙源節(jié)點(diǎn)具有定位對稱效應(yīng),定位坐標(biāo)存在嚴(yán)重的漂移現(xiàn)象。Jeba等[8]通過sink節(jié)點(diǎn)控制來建立錨節(jié)點(diǎn)粒子群移動(dòng)模型,使用周期遞歸方法來消除移動(dòng)過程中的錨節(jié)點(diǎn)移動(dòng)性過高帶來的頻率及坐標(biāo)抖動(dòng)問題。然而,該算法存在控制機(jī)制復(fù)雜所帶來的能量消耗較快等難題,運(yùn)行過程中穩(wěn)定性較差。
為此,本文提出了一種基于雙焦點(diǎn)離心測距機(jī)制的移動(dòng)傳感網(wǎng)高效定位算法。該算法將多跳定位拓?fù)滏溌芬暈榛【€鏈路,通過優(yōu)化最小跳數(shù)及定位拓?fù)浍@取定位橢圓橫向半徑和縱向半徑并計(jì)算離心率,達(dá)到精密化圓周弧線的目的。借助橢圓縱半徑跳數(shù)優(yōu)化方法來設(shè)計(jì)動(dòng)態(tài)測距模式,擴(kuò)大定位橢圓的覆蓋范圍,增強(qiáng)對待定位節(jié)點(diǎn)的覆蓋能力。最后,采用NS2仿真實(shí)驗(yàn)環(huán)境,驗(yàn)證了本文算法的性能。
1 網(wǎng)絡(luò)模型概述
考慮網(wǎng)絡(luò)節(jié)點(diǎn)分布區(qū)域?yàn)榫匦危娣e為m×nm2,區(qū)域內(nèi)按隨機(jī)模式來分布A個(gè)傳感節(jié)點(diǎn)與B個(gè)錨節(jié)點(diǎn),如圖1所示。則網(wǎng)絡(luò)net可用如下模型表示
net=G(Ai,Bj,E)
(1)
式中:Ai表示傳感節(jié)點(diǎn)集,Bj表示錨節(jié)點(diǎn)集,E表示節(jié)點(diǎn)間的拓?fù)滏溄渔溌贰?/p>

圖1 傳感節(jié)點(diǎn)分布
若第i個(gè)節(jié)點(diǎn)與第j個(gè)節(jié)點(diǎn)之間拓?fù)渚嚯x小于網(wǎng)絡(luò)節(jié)點(diǎn)最低覆蓋距離l,說明節(jié)點(diǎn)間可以建立數(shù)據(jù)傳輸鏈路。由于各節(jié)點(diǎn)在運(yùn)行過程中覆蓋能力可能存在差異,使得覆蓋距離難以在網(wǎng)絡(luò)中進(jìn)行統(tǒng)一,估計(jì)各傳感節(jié)點(diǎn)坐標(biāo)時(shí)均需要依賴于式(1)所示的拓?fù)滏溄渔溌罚艄?jié)點(diǎn)處于錨節(jié)點(diǎn)覆蓋之外,則將會(huì)出現(xiàn)失聯(lián)現(xiàn)象。因此,對節(jié)點(diǎn)進(jìn)行定位過程中需要關(guān)注失聯(lián)節(jié)點(diǎn),若某個(gè)節(jié)點(diǎn)在通信過程中發(fā)現(xiàn)自己成為失聯(lián)節(jié)點(diǎn),需要使用sink節(jié)點(diǎn)對該節(jié)點(diǎn)進(jìn)行能量補(bǔ)充,以便擴(kuò)大覆蓋范圍,從而降低定位失效現(xiàn)象。
一般而言,無論直接測距算法還是間接測距算法均需要使用圖1所示的錨節(jié)點(diǎn)進(jìn)行定位,其中錨節(jié)點(diǎn)位置已知,待定位節(jié)點(diǎn)與錨節(jié)點(diǎn)進(jìn)行數(shù)據(jù)交互,以便利用待定位節(jié)點(diǎn)與錨節(jié)點(diǎn)之間的鏈路估計(jì)相應(yīng)的拓?fù)涮鴶?shù),從而實(shí)現(xiàn)定位。
圖2描述了間接測距算法的實(shí)現(xiàn)過程。待定位節(jié)點(diǎn)獲取網(wǎng)絡(luò)中錨節(jié)點(diǎn)信息,當(dāng)待定位節(jié)點(diǎn)與3個(gè)及以上錨節(jié)點(diǎn)同時(shí)建立起傳輸鏈路。錨節(jié)點(diǎn)B1與錨節(jié)點(diǎn)B2、錨節(jié)點(diǎn)B3之間距離分別為10 m、20 m,相應(yīng)跳數(shù)分別為3跳和6跳,因此錨節(jié)點(diǎn)B1可獲取平均覆蓋距離l1
l1=(10+20)/(3+6)=3.33 m
(2)

圖2 間接測距
當(dāng)待定位節(jié)點(diǎn)i與錨節(jié)點(diǎn)B1與錨節(jié)點(diǎn)B2、錨節(jié)點(diǎn)B3之間的拓?fù)涮鴶?shù)為1、2、4時(shí),則該節(jié)點(diǎn)與錨節(jié)點(diǎn)B1與錨節(jié)點(diǎn)B2、錨節(jié)點(diǎn)B3之間的距離d(i,B1)、d(i,B2)、d(i,B3)滿足
d(i,B1)=1×3.33=3.33 m
(3)
d(i,B2)=2×3.33=6.66 m
(4)
d(i,B3)=4×3.33=13.32 m
(5)
由式(2)~式(5)及圖2可知,間接測距算法需要首先估計(jì)錨節(jié)點(diǎn)的平均覆蓋距離,并利用平均覆蓋距離估計(jì)各錨節(jié)點(diǎn)與待定位節(jié)點(diǎn)之間的拓?fù)溟L度。考慮到待定位節(jié)點(diǎn)覆蓋能力與錨節(jié)點(diǎn)相比存在一定的差異,因此需要針對估計(jì)過程進(jìn)行改進(jìn),以便提高定位準(zhǔn)確度,修正估計(jì)過程中存在的誤差。對拓?fù)渎窂竭M(jìn)行估計(jì)時(shí),應(yīng)考慮多跳情況下路徑析構(gòu)過程中存在的裁彎取直現(xiàn)象,用弧度模型替代直線距離,從而更好匹配實(shí)際距離,提高算法的對多跳環(huán)境的適應(yīng)能力。
2 本文算法設(shè)計(jì)
由上文可知,間接測距過程將錨節(jié)點(diǎn)與待定位節(jié)點(diǎn)間距離看作直線拓?fù)洌捎趥鬏旀溌穼?shí)際存在一定的弧度,采用直線拓?fù)錅y距需要將鏈路弧度進(jìn)行裁彎取直,因此定位過程存在一定的誤差,使得算法定位精度不理想。為此,本文設(shè)計(jì)了基于雙焦點(diǎn)離心測距機(jī)制的移動(dòng)傳感網(wǎng)高效定位算法(efficient positioning scheme for mobile sensor networks based on double focus centrifugal ranging algorithm)。該算法由兩部分構(gòu)成:①基于弧度路徑析構(gòu)的節(jié)點(diǎn)橢圓定位。通過采用弧線估測進(jìn)行定位拓?fù)鋬?yōu)化,結(jié)合錨節(jié)點(diǎn)來增加定位精度。②基于橢圓縱半徑跳數(shù)優(yōu)化的動(dòng)態(tài)測距。主要針對移動(dòng)無線傳感網(wǎng)拓?fù)渥儎?dòng)頻繁的特點(diǎn)進(jìn)一步提升橢圓覆蓋范圍,降低定位漂移現(xiàn)象,從而提高算法定位精度。
2.1 基于弧度路徑析構(gòu)的節(jié)點(diǎn)橢圓定位
由圖2可知,間接測量方法需要計(jì)算最小跳數(shù)并進(jìn)行距離估計(jì),但距離估計(jì)過程均依賴直線模型,使其具有較大的定位誤差。此外,傳統(tǒng)的間接測距方法在最小跳數(shù)計(jì)算過程中也存在一定的弊端,特別是采用待定位節(jié)點(diǎn)與錨節(jié)點(diǎn)交互方式進(jìn)行直接通信,會(huì)導(dǎo)致式(1)所示的拓?fù)滏溄渔溌稥難以建立。因此,本文對最小跳數(shù)及距離估計(jì)過程進(jìn)行優(yōu)化,設(shè)計(jì)了基于弧度路徑析構(gòu)的橢圓定位方法。
(1)最小跳數(shù)的獲取
首先,錨節(jié)點(diǎn)向sink節(jié)點(diǎn)進(jìn)行數(shù)據(jù)報(bào)文發(fā)送,將與各節(jié)點(diǎn)間的跳數(shù)及自身ID通過sink節(jié)點(diǎn)進(jìn)行全網(wǎng)廣播。網(wǎng)絡(luò)中除錨節(jié)點(diǎn)外的傳感節(jié)點(diǎn)(含待定位節(jié)點(diǎn))在接收到sink節(jié)點(diǎn)發(fā)送的數(shù)據(jù)報(bào)文后,記錄錨節(jié)點(diǎn)的ID并將跳數(shù)加1,如圖3所示。待定位節(jié)點(diǎn)接收到各錨節(jié)點(diǎn)發(fā)送的數(shù)據(jù)報(bào)文后,可獲取各錨節(jié)點(diǎn)的ID及相應(yīng)跳數(shù),由于一定傳輸周期內(nèi)待定位節(jié)點(diǎn)可能同時(shí)接收到若干個(gè)錨節(jié)點(diǎn)所發(fā)送的分組報(bào)文,因此可從這些分組報(bào)文中過濾出最小跳數(shù)對應(yīng)的錨節(jié)點(diǎn),記最小跳數(shù)Hop(min)如下
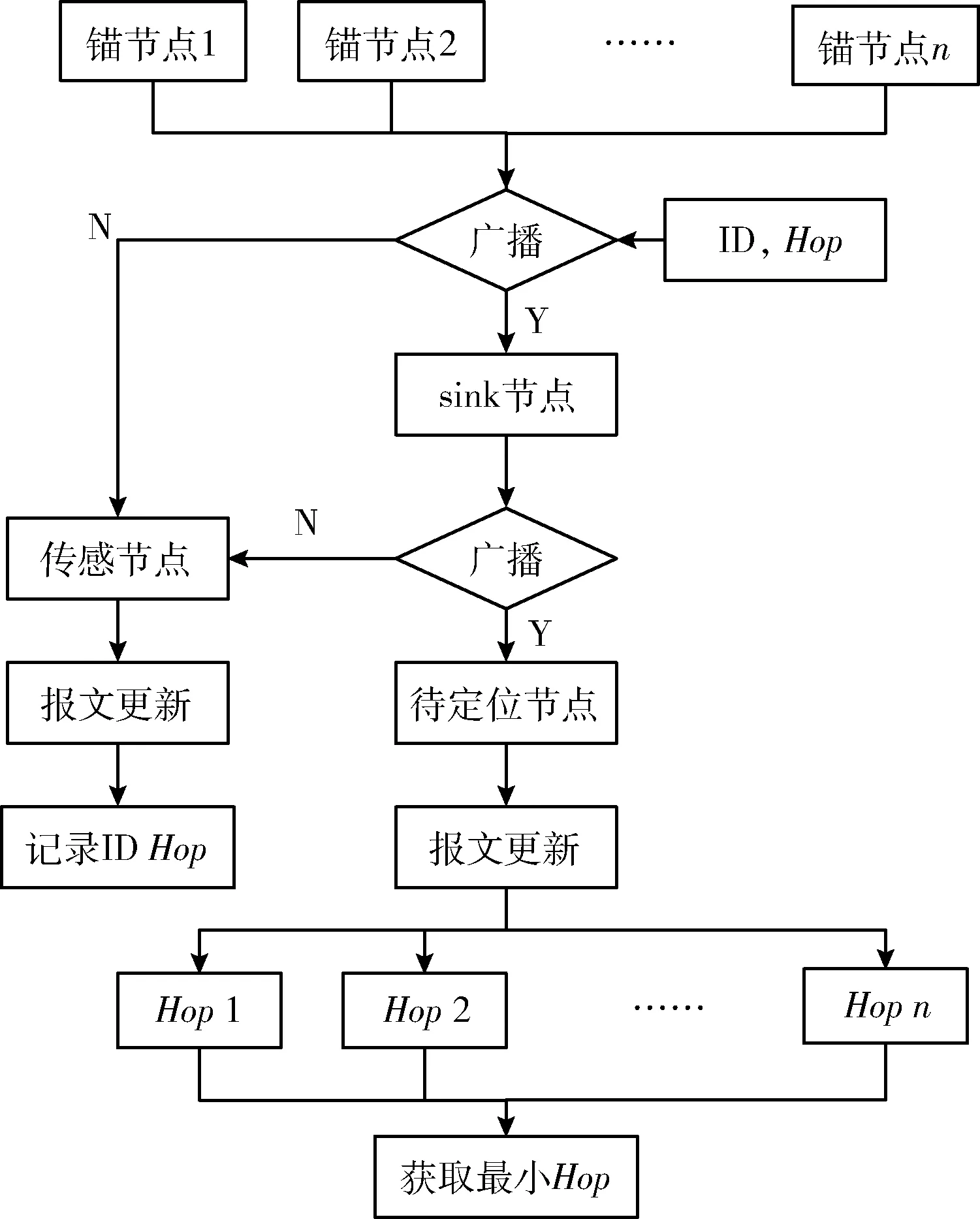
圖3 最小跳數(shù)的獲取
(6)
式中:Bn表示第n個(gè)錨節(jié)點(diǎn),hop表示分組報(bào)文中所對應(yīng)的跳數(shù)。
(2)確定橢圓定位范圍
考慮到網(wǎng)絡(luò)中待定位節(jié)點(diǎn)與各錨節(jié)點(diǎn)間拓?fù)滏溌反嬖诙嗵匦裕捎诖ㄎ还?jié)點(diǎn)與錨節(jié)點(diǎn)間鏈路可能存在斷裂現(xiàn)象,如圖4所示。為保證鏈路的可用性,對鏈路中通信能力較強(qiáng)的節(jié)點(diǎn)進(jìn)行能量補(bǔ)充,擴(kuò)大覆蓋范圍,以便鏈路保持暢通狀態(tài)如圖5所示。
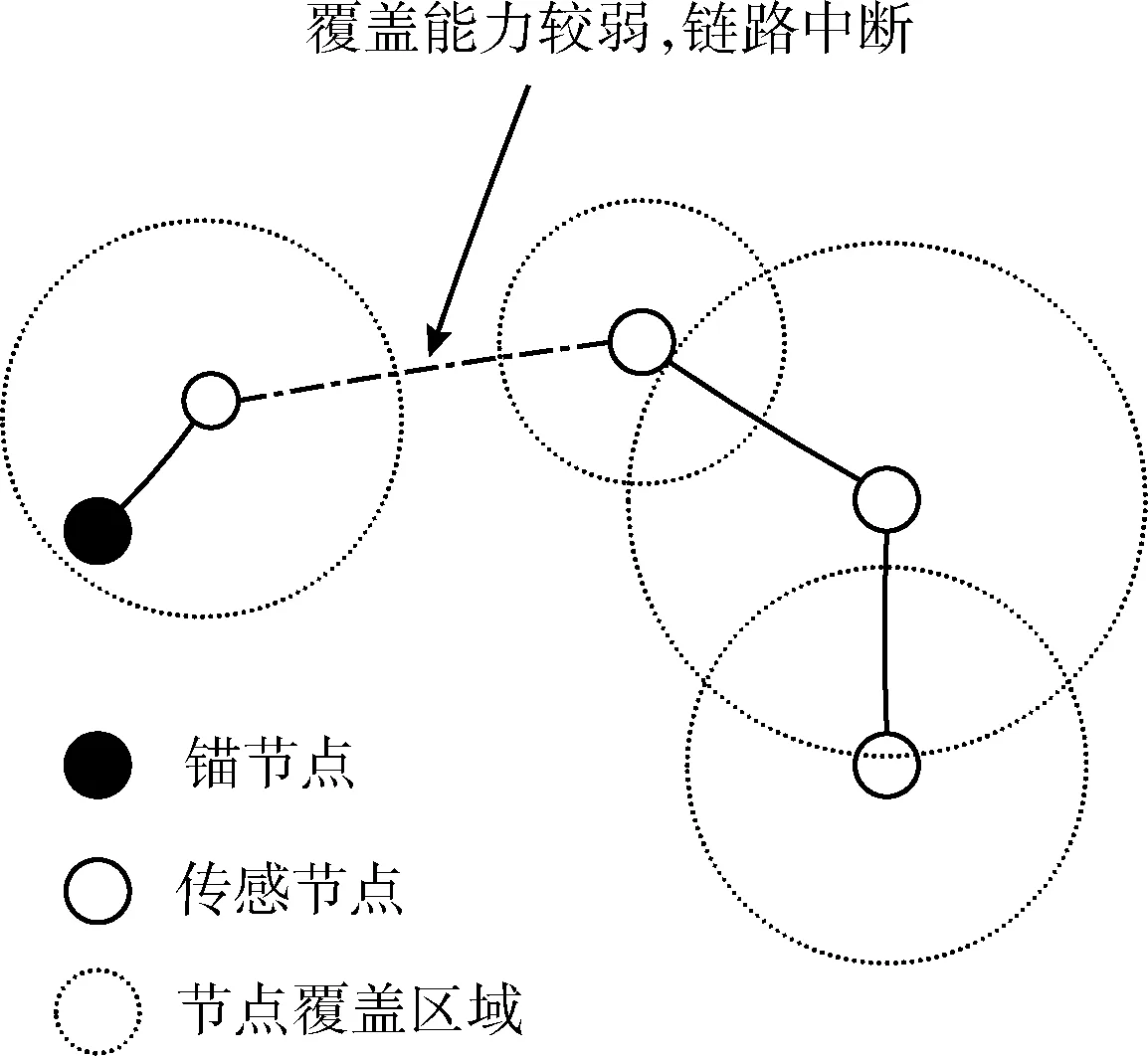
圖4 拓?fù)滏溌穲D(斷裂狀態(tài))

圖5 拓?fù)滏溌穲D(覆蓋范圍擴(kuò)大)
節(jié)點(diǎn)覆蓋區(qū)域擴(kuò)大后,顯然鏈路整體長度與錨節(jié)點(diǎn)-待定位節(jié)點(diǎn)直線距離存在誤差,如圖5所示。為了精確獲取待定位節(jié)點(diǎn)與錨節(jié)點(diǎn)間距離,須對鏈路整體長度進(jìn)行優(yōu)化。
首先,建立待定位節(jié)點(diǎn)與錨節(jié)點(diǎn)間的弧度路徑,如圖6所示,且該弧度看作是一個(gè)縱半徑2x和橫半徑2y的定位橢圓,并按如下模型獲取定位橢圓的離心率ε
(7)
據(jù)此,橢圓定位范圍得以確立,如圖6所示。

圖6 橢圓定位
2.2 基于橢圓縱半徑跳數(shù)優(yōu)化的動(dòng)態(tài)測距
橢圓定位范圍確立后,由于橢圓存在兩個(gè)焦點(diǎn),因此按式(7)計(jì)算的橢圓離心率,即可按圖6對橢圓覆蓋范圍進(jìn)行精確劃分。由于定位橢圓的縱半徑2x和橫半徑2y可能存在變動(dòng),因此需要考慮到路徑變化,以實(shí)現(xiàn)動(dòng)態(tài)測距,特別是盡量縮減定位橢圓的縱半徑2x,以便能夠?qū)Χㄎ煌負(fù)溥M(jìn)行動(dòng)態(tài)化評估,以提升測距結(jié)果的精度。

(8)
式中:hop(Bi,Ci)表示待定位節(jié)點(diǎn)Ci與錨節(jié)點(diǎn)Bi間的跳數(shù),Mj表示待定位節(jié)點(diǎn)Ci與錨節(jié)點(diǎn)Bi間的中間節(jié)點(diǎn)。
由式(8)可知,待定位節(jié)點(diǎn)Ci與錨節(jié)點(diǎn)Bi間鏈路整體長度G可由如下公式獲取
G=G×hop(Bi,Ci)
(9)
隨后,利用圖6所示的橢圓定位方法,結(jié)合式(9)及式(7),即可計(jì)算待定位節(jié)點(diǎn)Ci與錨節(jié)點(diǎn)Bi間的距離P
P=G/πx(1-ε2/4)
(10)
式中:ε為式(7)確定的離心率。
聯(lián)立式(7)和式(10),將待定位節(jié)點(diǎn)Ci與錨節(jié)點(diǎn)Bi間的跳數(shù)hop(Bi,Ci)替換式(7)中的2y,令自變量為x,則定位橢圓的縱半徑方程如下
12πx2+πhop(Bi,Ci)2=G
(11)
式中:G為待定位節(jié)點(diǎn)Ci與錨節(jié)點(diǎn)Bi間鏈路整體長度。
再根據(jù)式(11)來求取x的最小值為
minx=G/2
(12)
通過式(12)獲取定位橢圓的橫半徑x后,令(x,y)表示待定位節(jié)點(diǎn)的坐標(biāo),(xj,yj)表示錨節(jié)點(diǎn)坐標(biāo),并設(shè)待定位節(jié)點(diǎn)坐標(biāo)與各錨節(jié)點(diǎn)坐標(biāo)間距離為dj。則可建立定位方程Q
(13)
再對式(13)進(jìn)行系數(shù)分離,可得
(14)

(15)
(16)
聯(lián)立式(14)~式(16)可得
TZ=J
(17)
顯然,Z滿足
Z=(TTU)-1TJ
(18)
式中:U表示矩陣轉(zhuǎn)秩。
通過式(18)即可精確獲取待定位節(jié)點(diǎn)坐標(biāo)(x,y)。由于待定位節(jié)點(diǎn)與錨節(jié)點(diǎn)間鏈路整體長度可通過式(9)來獲取,其相應(yīng)的最小跳數(shù)可通過式(8)進(jìn)行動(dòng)態(tài)評估,結(jié)合定位橢圓弧形邊與待定位節(jié)點(diǎn)坐標(biāo)(x,y)之間的對應(yīng)關(guān)系,即可在定位橢圓上快速通過路徑回溯待定位節(jié)點(diǎn),從而達(dá)到動(dòng)態(tài)測距的目的。
3 本文算法的復(fù)雜度分析
本文算法主要由基于弧度路徑析構(gòu)的節(jié)點(diǎn)橢圓定位和基于橢圓縱半徑跳數(shù)優(yōu)化的動(dòng)態(tài)測距兩部分構(gòu)成。不妨設(shè)網(wǎng)絡(luò)中傳感節(jié)點(diǎn)數(shù)量為m,錨節(jié)點(diǎn)個(gè)數(shù)為n。在基于弧度路徑析構(gòu)的節(jié)點(diǎn)橢圓定位過程中,所提算法首先需要通過逐個(gè)過濾傳感節(jié)計(jì)算獲取最小跳數(shù),并通過分組報(bào)文中過濾出最小跳數(shù)對應(yīng)的錨節(jié)點(diǎn),其復(fù)雜度為o(m)。基于橢圓縱半徑跳數(shù)優(yōu)化的動(dòng)態(tài)測距機(jī)制在獲取最小跳數(shù)的基礎(chǔ)上,按式(13)建立定位方程組,方程組建立過程中將通過錨節(jié)點(diǎn)逐個(gè)建立定位方程,由于錨節(jié)點(diǎn)個(gè)數(shù)為n,因此復(fù)雜度為o(n)。因此,綜合上述2個(gè)過程,本文算法的復(fù)雜度為o(m)+o(n)。
為了突出所提算法的優(yōu)勢,將文獻(xiàn)[14]和文獻(xiàn)[15]視為對照組。文獻(xiàn)[14]算法在遍歷網(wǎng)絡(luò)錨節(jié)點(diǎn)的基礎(chǔ)上,逐項(xiàng)計(jì)算各節(jié)點(diǎn)間的平均跳數(shù),該過程的復(fù)雜度為o(m),隨后需要對符合要求的信標(biāo)節(jié)點(diǎn)進(jìn)行迭代,迭代次數(shù)為n,考慮到匹配信標(biāo)節(jié)點(diǎn)的過程需要遍歷全部傳感節(jié)點(diǎn),此過程復(fù)雜度為o(m×n),因此文獻(xiàn)[14]算法復(fù)雜度為o(m)+o(m×n),顯然要高于本文所提算法。文獻(xiàn)[15]通過構(gòu)建罰函數(shù)模型來記錄定位過程中性能較差節(jié)點(diǎn)坐標(biāo),記錄過程中均遍歷全部傳感節(jié)點(diǎn)并得到學(xué)習(xí)樣本,隨后將動(dòng)態(tài)學(xué)習(xí)該樣本,得到樣本獲取過程對應(yīng)的算法復(fù)雜度為o(m2),學(xué)習(xí)過程按照水波算法進(jìn)行迭代,迭代次數(shù)為n,該過程復(fù)雜度為o(m×n)。因此,文獻(xiàn)[15]算法復(fù)雜度為o(m2)+o(m×n)。考慮到傳感網(wǎng)絡(luò)中錨節(jié)點(diǎn)個(gè)數(shù)一般要少于傳感節(jié)點(diǎn)個(gè)數(shù),因此,文獻(xiàn)[15]算法的算法復(fù)雜度亦要遠(yuǎn)遠(yuǎn)高于本文算法。綜上所述,本文算法在復(fù)雜度方面具有一定的優(yōu)勢,具有定位過程較為簡單的特點(diǎn),能夠以較快的速度獲取待定位節(jié)點(diǎn)的坐標(biāo)。
4 仿真實(shí)驗(yàn)
為便于驗(yàn)證本文算法性能,采取NS2平臺(tái)(network simulator version 2)進(jìn)行仿真實(shí)驗(yàn)。實(shí)驗(yàn)區(qū)域?yàn)榫匦螀^(qū)域,面積為1000×1000 m2。由于移動(dòng)無線傳感網(wǎng)具有拓?fù)渥儎?dòng)較快的特性,針對待定位節(jié)點(diǎn)均將重復(fù)進(jìn)行10次定位過程,將10次定位結(jié)束后獲取的坐標(biāo)平均值視為標(biāo)準(zhǔn)結(jié)果,以便降低網(wǎng)絡(luò)拓?fù)漕l繁變動(dòng)所造成的定位誤差。傳感節(jié)點(diǎn)制式采用5G移動(dòng)通信模型,使用64ASP調(diào)制方式,其余實(shí)驗(yàn)參數(shù)見表1。另外,為了突出所提算法的先進(jìn)性,將當(dāng)前移動(dòng)無線傳感網(wǎng)領(lǐng)域中常用的基于跳數(shù)修正和改進(jìn)粒子群優(yōu)化DV-Hop定位算法[14](DV-Hop localization algorithm based on hop number modification and improved particle swarm optimization,HNM-IPS算法)、基于罰函數(shù)與水波優(yōu)化的WSN定位算法[15](WSN location algorithm based on penalty function and water wave optimization,PF-WWO算法)和基于三維離散混沌映射的無線傳感器網(wǎng)絡(luò)定位算法[16](A WSN positioning algorithm based on 3D discrete chaotic mapping,3D-DCM算法)作為對照組。

表1 仿真參數(shù)
實(shí)驗(yàn)開始后,通過統(tǒng)計(jì)各算法的定位精度及定位次數(shù)來客觀評價(jià)。定位精度測試過程中,考慮到多個(gè)待定位節(jié)點(diǎn)坐標(biāo)記錄在不同周期內(nèi)存在一定的變動(dòng),因此將待定位節(jié)點(diǎn)設(shè)置為靜止?fàn)顟B(tài),sink節(jié)點(diǎn)作為測量節(jié)點(diǎn),沿矩形分布區(qū)域周圍以10 m/s的速度移動(dòng)并捕捉待定位節(jié)點(diǎn)坐標(biāo),最終形成定位精度仿真記錄圖,其中錨節(jié)點(diǎn)保持靜止?fàn)顟B(tài)。定位次數(shù)測試過程中,sink節(jié)點(diǎn)和錨節(jié)點(diǎn)均保持靜止,待定位節(jié)點(diǎn)按不同速度進(jìn)行游走,達(dá)到某定位精度后即記錄其定位次數(shù)。
4.1 定位精度測試
圖7(a)為待定位節(jié)點(diǎn)實(shí)際分布,圖7(b)~圖7(d)為本文算法、HNM-IPS算法、PF-WWO算法在進(jìn)行10次定位后所測的坐標(biāo)分布結(jié)果。由圖可知,本文算法所測坐標(biāo)分布與待定位節(jié)點(diǎn)的實(shí)際分布契合度最高,而HNM-IPS算法、PF-WWO算法的所測坐標(biāo)分布均與待定位節(jié)點(diǎn)實(shí)際分布存在較大的偏離。這是由于本文算法設(shè)計(jì)了橢圓定位機(jī)制,將定位過程中的直線跳距進(jìn)行橢圓曲線化處理,可將直線架構(gòu)拓?fù)湫拚秊榫雀叩幕《然€拓?fù)洌貏e是在處理過程中基于離心模式對橢圓弧邊進(jìn)行精度修正,可有效平滑待定位節(jié)點(diǎn)與錨節(jié)點(diǎn)間所測拓?fù)滏溌罚档蜏y序過程中因弧度誤差而導(dǎo)致定位漂移現(xiàn)象的發(fā)生概率,因此具有較高的定位精度。HNM-IPS算法主要通過計(jì)算錨節(jié)點(diǎn)之間平均拓?fù)涠ㄎ惶鴶?shù),并利用該跳數(shù)修正定位過程中出現(xiàn)的鄰域裁定誤差,沒有考慮所測距離存在的直線拓?fù)錅y距誤差,雖然采用粒子群方法來修正進(jìn)行定位誤差,但難以消除多跳環(huán)境中的測距誤差,特別是拓?fù)涓l繁時(shí)期誤差將更為明顯,因此其定位精度較低。PF-WWO算法采用動(dòng)態(tài)學(xué)習(xí)策略來優(yōu)化定位過程,并設(shè)計(jì)罰函數(shù)來記錄定位過程中性能較差節(jié)點(diǎn)坐標(biāo),從而獲取信號(hào)強(qiáng)度較高的錨節(jié)點(diǎn),然而該算法亦對移動(dòng)無線傳感環(huán)境存在的拓?fù)渥儎?dòng)考慮不夠,迭代過程中需要預(yù)設(shè)次數(shù),難以對節(jié)點(diǎn)坐標(biāo)進(jìn)行精確匹配,因此所測鏈路在拓?fù)渥儎?dòng)頻繁時(shí)存在較高的劇烈變動(dòng)概率,導(dǎo)致直線拓?fù)渑c實(shí)際所測鏈路出現(xiàn)匹配困難的問題,因此定位精度難以進(jìn)一步提升,使得該算法定位精度亦要低于本文方法。3D-DCM算法主要采取最小二乘估計(jì)模式估測坐標(biāo),從通信半徑及拓?fù)浣Y(jié)構(gòu)兩個(gè)方面優(yōu)化節(jié)點(diǎn)定位精度,且構(gòu)造三維離散混沌映射,將混沌優(yōu)化算法引入到定位誤差精度提高之中,一定程度上解決了節(jié)點(diǎn)移動(dòng)過程中出現(xiàn)的定位漂移現(xiàn)象。然而,該算法對節(jié)點(diǎn)運(yùn)動(dòng)速度方面限制性較高,特別是在三維離散混沌映射過程中嚴(yán)重依賴線性映射方法,使其僅能針對已定路徑上的節(jié)點(diǎn)進(jìn)行精度估計(jì),因此,在拓?fù)涑霈F(xiàn)變動(dòng)時(shí)將因映射失效而導(dǎo)致精度會(huì)出現(xiàn)較大幅度下降,降低了節(jié)點(diǎn)坐標(biāo)匹配程度。
4.2 定位次數(shù)測試
圖8為本文算法與HNM-IPS算法、PF-WWO算法在達(dá)成相同定位精度時(shí)所花費(fèi)的定位次數(shù)的測試結(jié)果,其中,定位誤差數(shù)值越低說明定位精度也就越高。由圖可知,所提算法在達(dá)成相同定位精度條件下所耗費(fèi)的定位次數(shù)更短,說明本文算法具有很強(qiáng)的定位能力,對移動(dòng)無線傳感網(wǎng)高拓?fù)淞鲃?dòng)特性適應(yīng)能力更強(qiáng)。這是由于本文算法在弧度路徑析構(gòu)的基礎(chǔ)上,針對定位橢圓存在的半徑抖動(dòng)情形,設(shè)計(jì)了基于橢圓縱半徑跳數(shù)優(yōu)化的動(dòng)態(tài)測距機(jī)制,可迅速捕捉待定位節(jié)點(diǎn),算法運(yùn)行過程中僅需要針對錨節(jié)點(diǎn)與傳感節(jié)點(diǎn)進(jìn)行遍歷并解析最小跳數(shù),無需采用粒子群模式進(jìn)行多次迭代,因此具有定位次數(shù)較低的特點(diǎn)。HNM-IPS算法采用粒子群模式逐次迭代定位坐標(biāo),迭代次數(shù)與定位精度具有顯著的正相關(guān)特性,當(dāng)定位精度難以滿足需求時(shí)需要頻繁迭代坐標(biāo),因此達(dá)到相同定位精度所耗次數(shù)較高。PF-WWO算法所提罰函數(shù)機(jī)制雖然能夠增強(qiáng)待定位節(jié)點(diǎn)在定位過程中對錨節(jié)點(diǎn)的搜尋能力,然而由于該算法并未對移動(dòng)無線傳感環(huán)境中存在的多跳路徑進(jìn)行弧形優(yōu)化,因此對路徑適應(yīng)能力較低,使得達(dá)到相同定位精度所耗的次數(shù)要高于本文算法。3D-DCM算法從通信半徑及拓?fù)浣Y(jié)構(gòu)兩個(gè)方面對節(jié)點(diǎn)定位精度進(jìn)行提升,并采取最小二乘估計(jì)模式對坐標(biāo)進(jìn)行進(jìn)一步優(yōu)化。然而,該算法進(jìn)行定位過程中需要采集的樣本數(shù)較多,在拓?fù)浣Y(jié)構(gòu)變動(dòng)頻繁的情況下樣本精確度易出現(xiàn)下降,此外,該算法對網(wǎng)絡(luò)資源進(jìn)行優(yōu)化時(shí)單純依賴于能量因素,頻繁進(jìn)行映射過程中容易導(dǎo)致定位節(jié)點(diǎn)出現(xiàn)能量受限,致使出現(xiàn)重定位現(xiàn)象較為突出,使得在定位次數(shù)上要高于本文算法。

圖7 不同算法的定位精度

圖8 定位次數(shù)
5 結(jié)束語
為解決移動(dòng)傳感網(wǎng)在拓?fù)淞鲃?dòng)性較高情形下存在的定位精度不高、數(shù)據(jù)傳輸能力較差、抗干擾性較弱等不足,提出了一種基于雙焦點(diǎn)離心測距機(jī)制的移動(dòng)傳感網(wǎng)高效定位算法。通過設(shè)計(jì)橢圓定位機(jī)制,對直線拓?fù)溥M(jìn)行橢圓弧形優(yōu)化處理,提高測距過程中的首次定位精度。隨后,通過橢圓覆蓋范圍來應(yīng)對網(wǎng)絡(luò)拓?fù)渥儎?dòng)頻繁的情形,從而解決因拓?fù)錅y距失真而導(dǎo)致定位精度下降的問題,提高節(jié)點(diǎn)頻繁移動(dòng)情形下的定位效率。
下一步,將針對本文算法對立體傳感網(wǎng)絡(luò)適應(yīng)性不足的問題,擬引入超流體拓?fù)湓u估方式,將定位橢圓擴(kuò)充為基于三維曲面機(jī)制的立體定位橢球,以便能夠適用于諸如無人機(jī)、戰(zhàn)術(shù)數(shù)據(jù)鏈組網(wǎng)等實(shí)際應(yīng)用場景,進(jìn)一步提高本文算法的部署價(jià)值。
